Epreuve de Sciences Industrielles C
|
|
|
- Fabienne Bruneau
- il y a 9 ans
- Total affichages :
Transcription
1 065 Epreuve de Sciences Industrielles C Durée 6 h Si, au cours de l épreuve, un candidat repère ce qui lui semble être une erreur d énoncé, d une part il le signale au chef de salle, d autre part il le signale sur sa copie et poursuit sa composition en indiquant les raisons des initiatives qu il est amené à prendre.! L usage de calculatrices est interdit Aucun document n est autorisé Composition du sujet : 1 cahier de 10 pages de texte numérotées de 12 à cahier de documents ressources de 14 pages, numérotés Ressource i avec i = 1 à calque format A3 à rendre à la fin de l épreuve. 1 cahier réponse de 13 pages à rendre à la fin de l épreuve. Gestion du temps : En admettant une durée de 15 minutes pour la lecture et l'assimilation du sujet, il est vivement conseillé de consacrer environ % du temps à la partie I, environ 15 % du temps à la partie II, environ 15 % du temps à la partie III, environ 5 % du temps à la partie IV, environ 25 % du temps à la partie V et environ 20 % du temps à la partie VI. Il est demandé au candidat de formuler toutes les hypothèses qu'il jugera nécessaires pour répondre aux questions posées. La présentation, la lisibilité, l orthographe, la qualité de la rédaction, la clarté et la précision des raisonnements entreront pour une part importante dans l appréciation des copies. En particulier, les résultats non justifiés ne seront pas pris en compte. L'ensemble des réponses sera rédigé sur les documents réponses dans les espaces libres proposés pour chaque question. Tournez la page S.V.P. Il est interdit aux candidats de signer leur composition ou d y mettre un signe quelconque pouvant indiquer sa provenance.! A Tournez la page S.V.P.

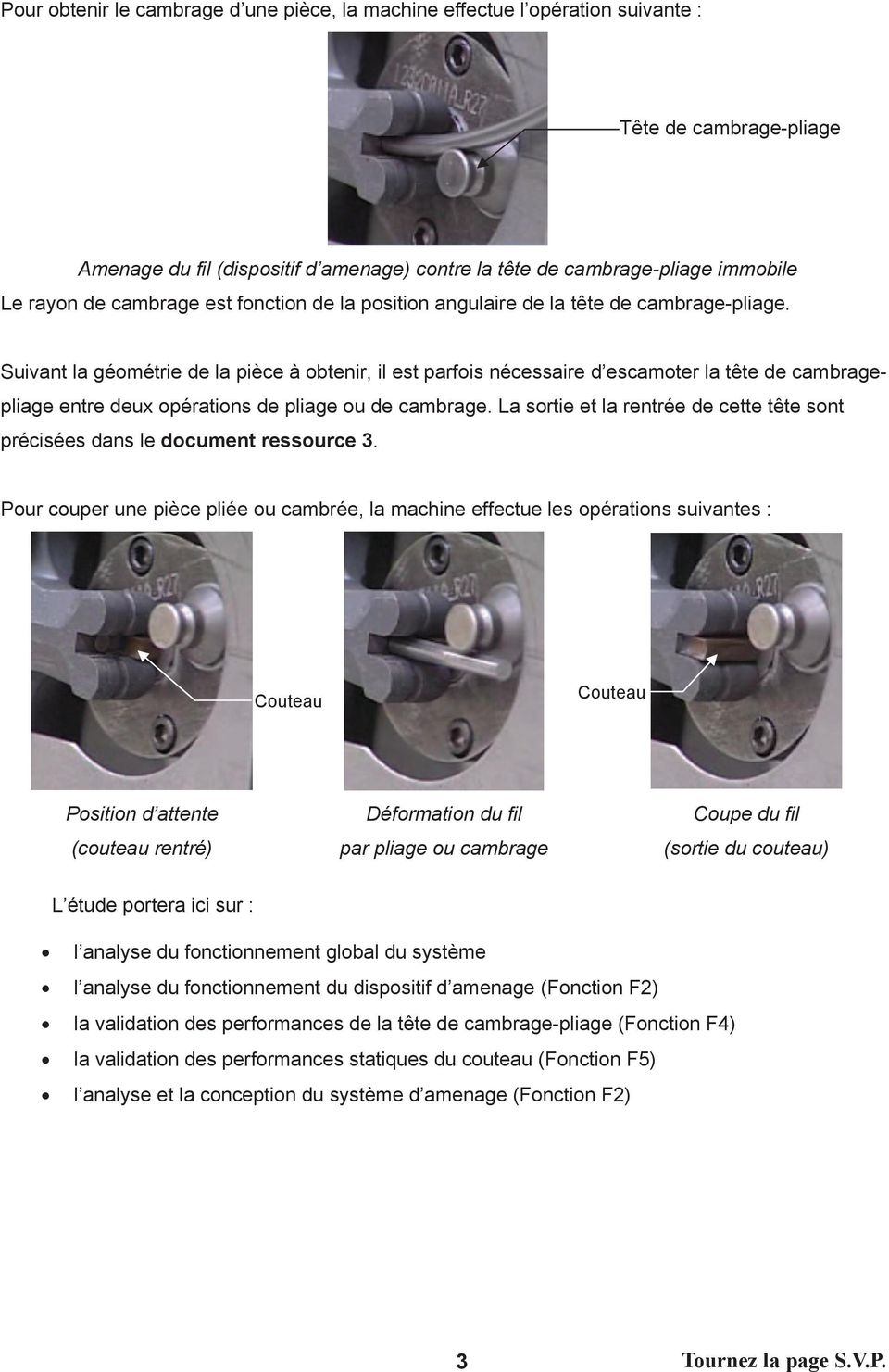
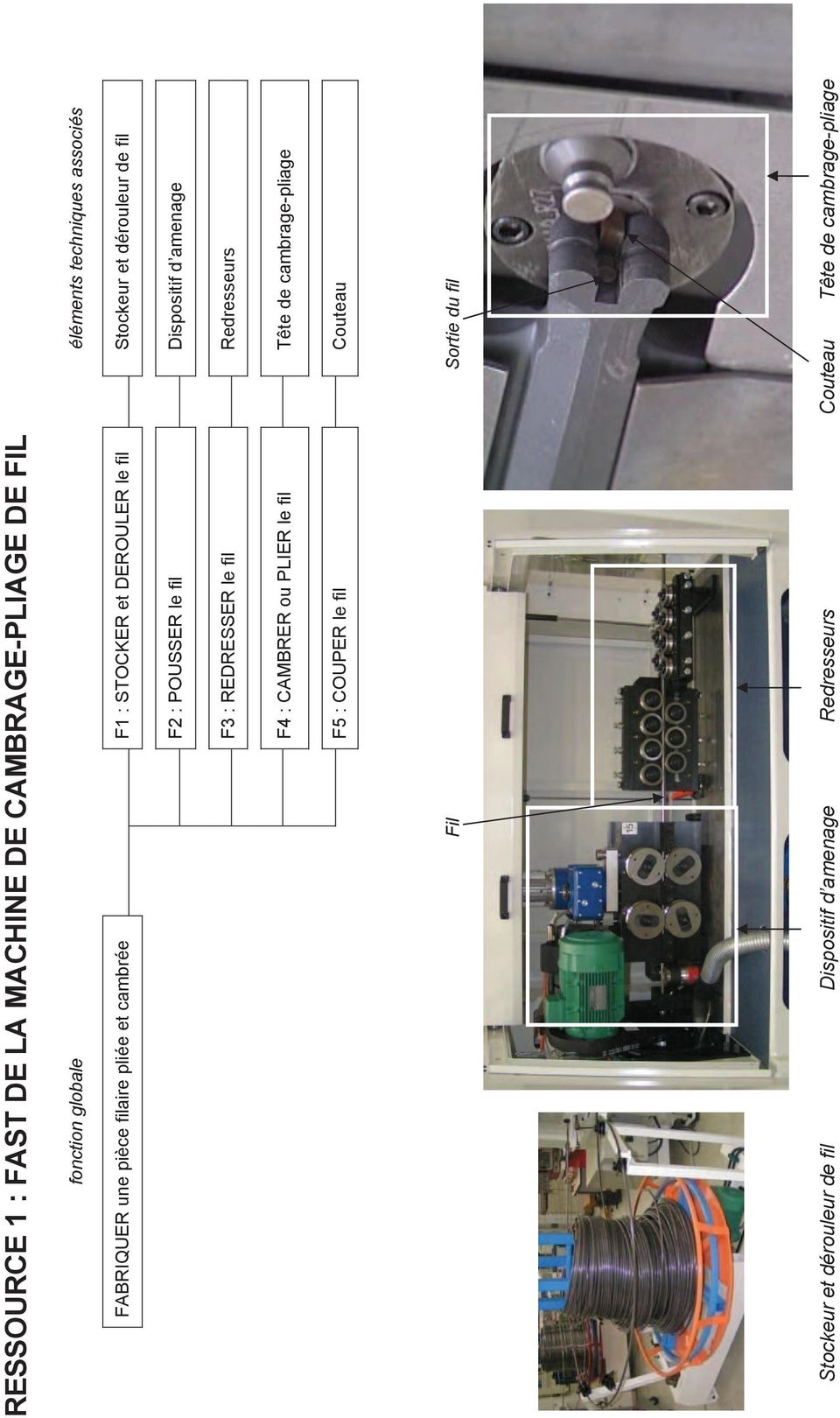
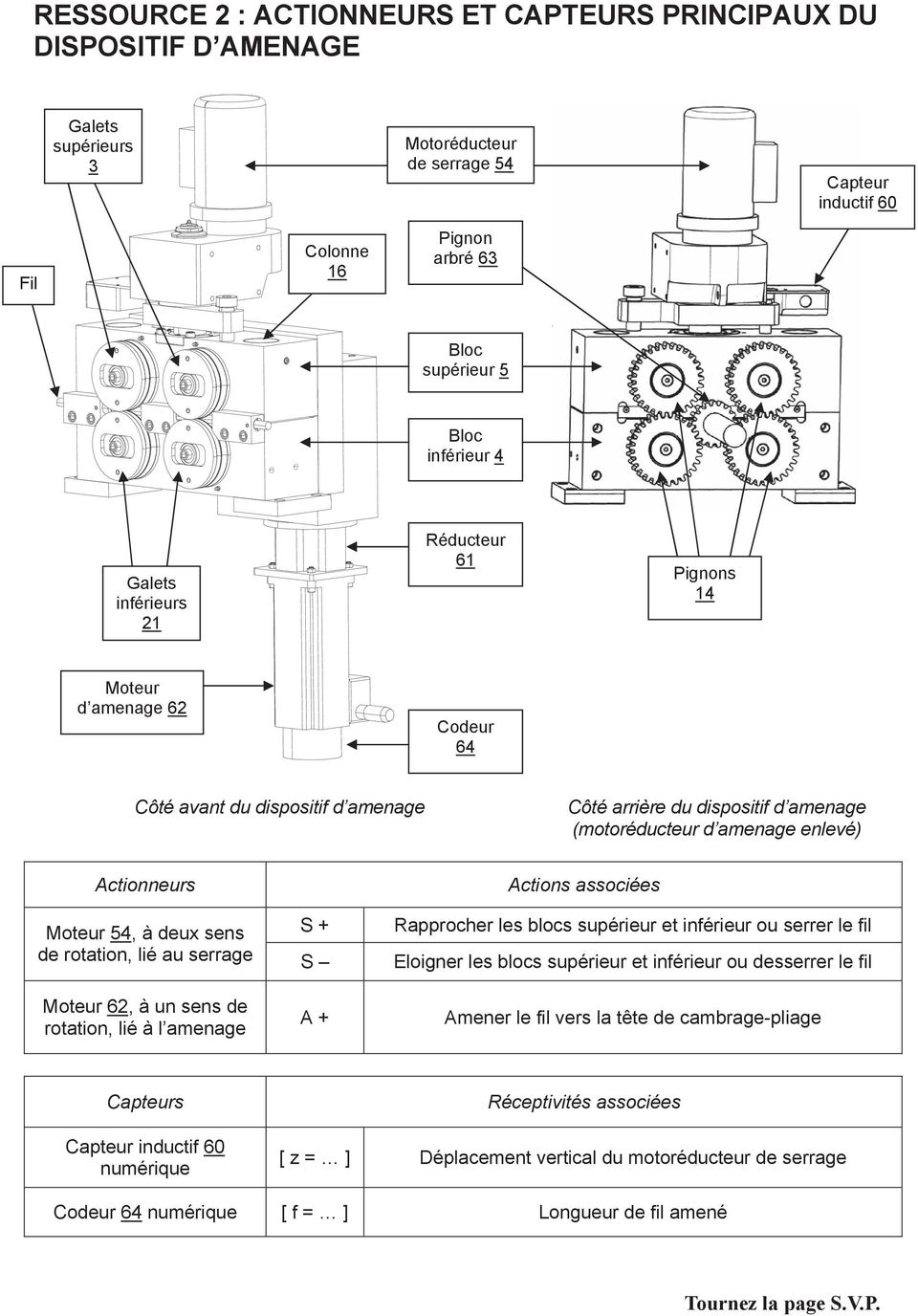
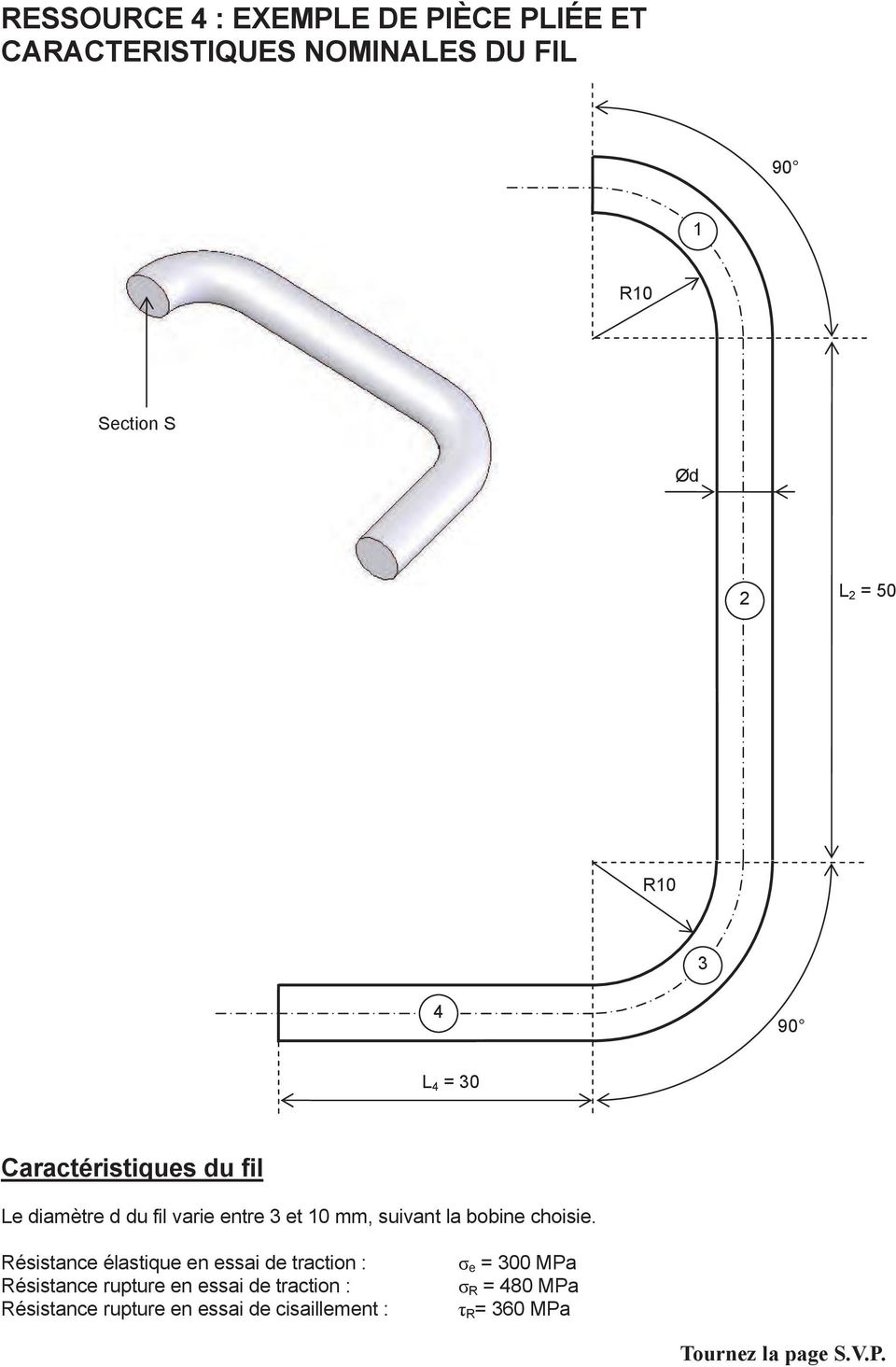
2 ÉTUDE DE LA MACHINE DE CAMBRAGE-PLIAGE DE FIL Présentation générale La société NUMALLIANCE située dans l Est de la France (Vosges 88) est spécialisée dans la fabrication de machines destinées au formage de fils et au cintrage de tubes. La machine étudiée est la machine standard F27 2D qui permet la réalisation en série des produits du type de ceux présentés ci-dessous. Ces pièces se retrouvent dans les sièges de voiture, les chariots à roulettes type «caddies», les présentoirs de grande distribution, dans l ameublement, etc. La matière d œuvre est du fil métallique fourni en bobine. La machine F27 2D se compose de cinq parties principales : - stockeur et dérouleur du fil, - dispositif d amenage du fil, - redresseur de fil, - tête de cambrage-pliage du fil, - couteau de coupe du fil. Le diagramme FAST de la machine de cambrage-pliage de fil est décrit dans le document ressource 1. Les actionneurs et les principaux capteurs de la machine de cambrage-pliage sont recensés dans les documents ressources 2 et 3. Le fil est entraîné par adhérence du dérouleur vers la tête de cambrage-pliage à l aide de galets du dispositif d amenage. Le cambrage et le pliage sont obtenus avec la même tête. Pour obtenir le pliage d une pièce, la machine effectue les opérations successives suivantes : Tête de cambrage-pliage Coude 1 Amenage du fil par le dispositif d amenage Pliage du fil par la rotation de la tête de cambragepliage (ici dans le sens négatif) Le rayon de pliage correspond au rayon du coude 1. 2

3 Tournez la page S.V.P.
4
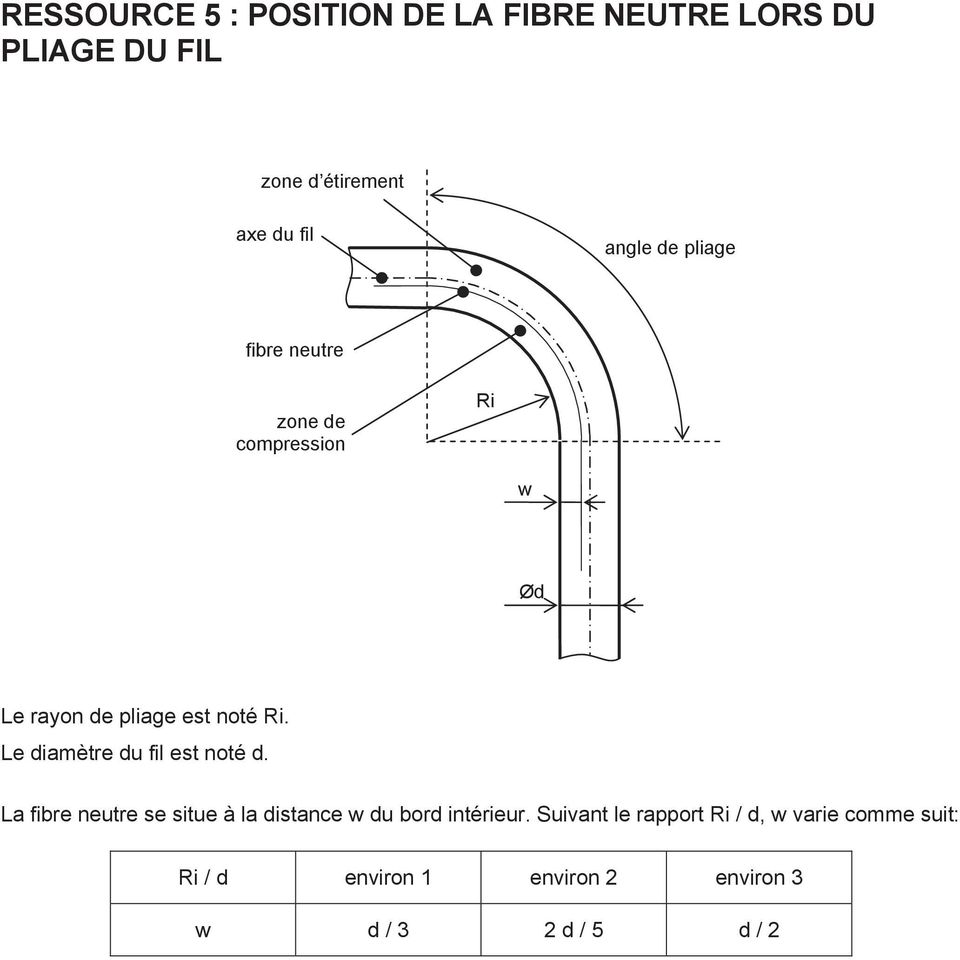
5 Hypothèses : pour les applications numériques, on posera : π 3, on néglige le glissement entre les galets 21 (ou 3) et le fil à amener, le fil à amener est supposé droit et indéformable. Q2. Déterminer f sous forme littérale en fonction de β et des caractéristiques techniques du dispositif d amenage. Q3. Réaliser un schéma d un codeur numérique absolu de position à trois pistes en code Gray pour expliquer le fonctionnement de ce type de codeur. Q4. Calculer l incrément minimum Δβ (exprimé en radians) de l angle relevé directement par le codeur 64 qui comporte 10 pistes. Q5. En déduire l incrément minimum Δf (exprimé en mm) de la longueur de fil amené, relevé indirectement par le codeur 64. Lors du pliage, les fibres intérieures sont comprimées alors que celles extérieures subissent un étirement. La frontière entre ces deux zones est nommée fibre neutre. La longueur de fil à amener à la tête de cambrage-pliage correspond à la longueur de la fibre neutre, et non à la longueur de l axe du fil. L angle obtenu est appelé «angle de pliage». Le rayon de pliage est noté Ri. Le document ressource 5 présente la position de la fibre neutre lors du pliage du fil. L exemple de pièce pliée (voir document ressource 4) est à réaliser avec des fils de diamètres variant entre 3 et 10 mm. Q6. Pour réaliser la partie numérotée 1 de l exemple de pièce pliée, supposons que la longueur de fil à amener à la tête de cambrage-pliage soit calculée à partir de la longueur de l axe du fil. Justifier si la longueur réellement amenée est alors supérieure ou inférieure à la longueur théorique à amener. Quantifier l écart maximal entre ces deux longueurs. Q7. Justifier à l aide de schémas si l hypothèse «on néglige le glissement entre les galets 21 (ou 3) et le fil à amener» entraîne que la longueur réellement amenée est supérieure ou inférieure à la longueur théorique à amener. II. Validation des performances de la tête de cambrage-pliage (Fonction F4) La machine étudiée permet d obtenir différents rayons de courbure de fil. Un rayon élevé sera obtenu par cambrage. Un rayon faible sera obtenu par pliage. La première étude portera sur l analyse géométrique du procédé de cambrage de cette machine. La seconde étude portera sur l analyse statique du procédé de pliage de cette machine. li-a. Analyse géométrique du procédé de cambrage Le cambrage du fil est obtenu en amenant le fil contre la tête de cambrage-pliage immobile (voir présentation générale). 5 Tournez la page S.V.P.
 de l angle relevé directement par le codeur 64 qui comporte 10 pistes. Q5.")
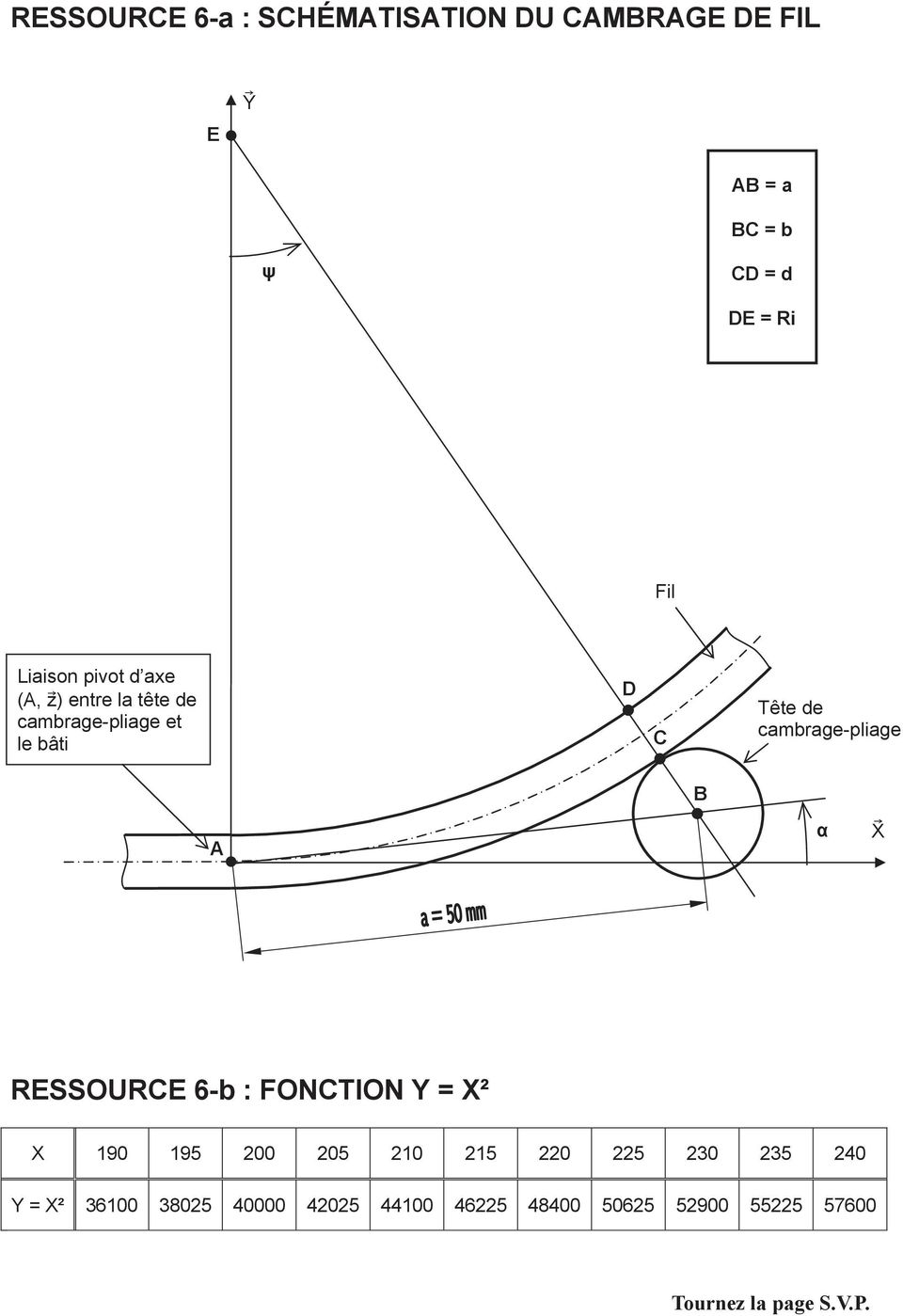
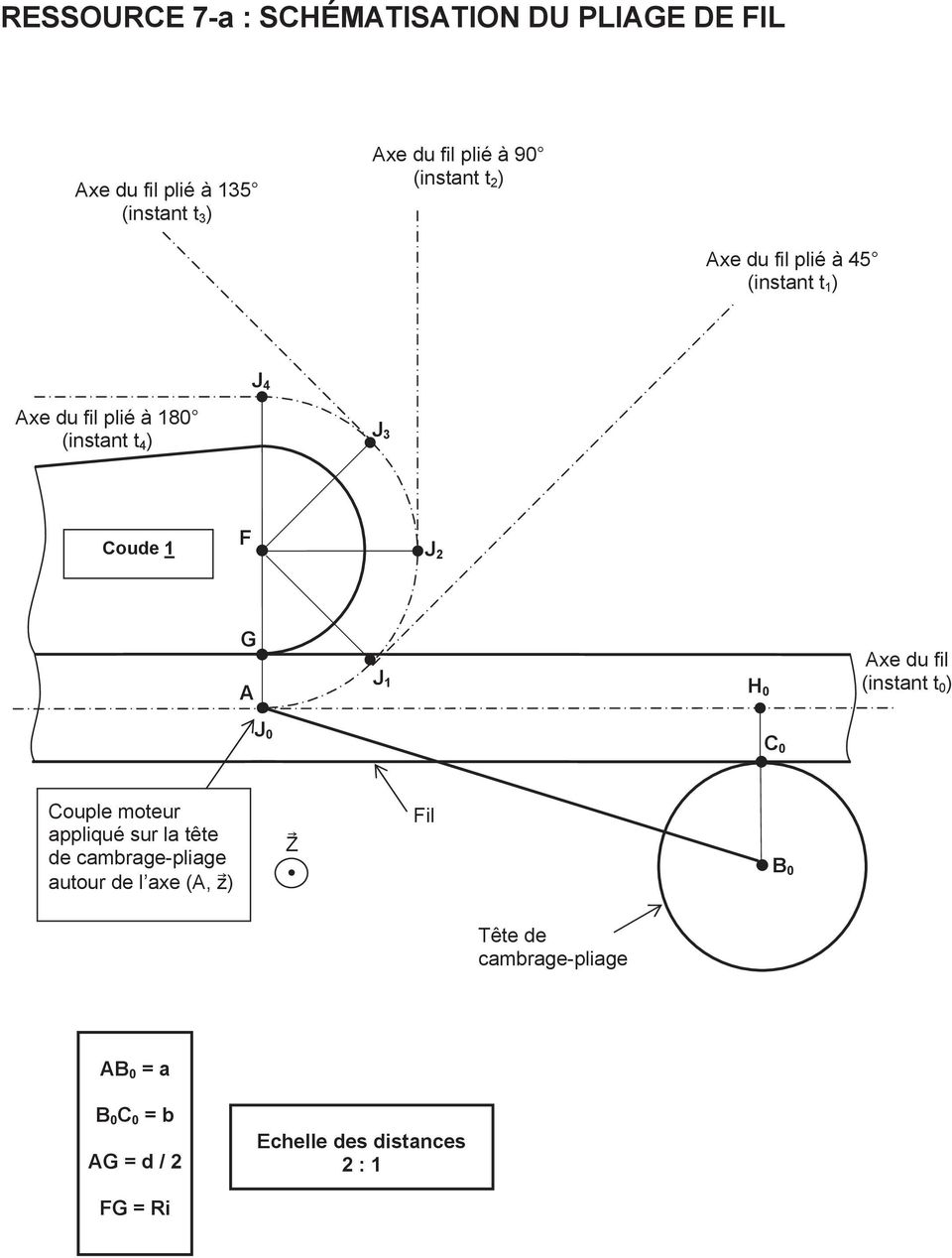
6 L effort axial créant cette déformation provient du dispositif d amenage. On cherche ici à connaître la relation entre la position angulaire α de la tête de cambrage-pliage et le rayon de cambrage Ri obtenu. Le document ressource 6-a propose un schéma qui servira de support à notre étude géométrique. Les proportions entre les distances n y sont pas respectées. Le document ressource 6-b recense quelques valeurs de la fonction y = x². Hypothèses : le rayon de cambrage Ri est supposé constant. la tête de cambrage-pliage a effectué une rotation d un angle α autour de l axe (A, z) par rapport au bâti. l angle α étant ici faible, on posera pour simplifier : sin α α et cos α 1 Données : la tête de cambrage-pliage a pour centre B et est excentrée de a = 50 mm le rayon de la tête de cambrage-pliage est b = 10 mm le diamètre du fil est noté d le rayon de cambrage est noté Ri. Q8. A partir d une fermeture géométrique vectorielle, déterminer α en fonction de Ri, a, b et d. Q9. Déterminer alors la valeur numérique de l angle α correspondant à un rayon de cambrage Ri = 200 mm pour un diamètre de fil d = 10 mm. On pourra s aider du document ressource 6-b. li-b. Analyse statique du procédé de pliage Le pliage du fil est obtenu en enroulant le fil contre le coude 1. L effort créant cette déformation provient du mouvement de la tête de cambrage-pliage. 1 On cherche ici à vérifier le dimensionnement du moteur lié à la tête de cambrage-pliage. Le document ressource 7-a propose un schéma qui nous servira de support à nos études géométrique et statique. La position initiale (instant t 0 ) du fil et de la tête de cambrage-pliage y est indiquée, ainsi que les positions de l axe du fil au cours du pliage (instants t 1 à t 4 ). Le fil plie progressivement autour des différents points J k (avec 0 k 4). J 0 est assimilé à A. Au cours du pliage du fil, on associe un modèle poutre au fil et on appelle Mf le moment fléchissant maximal dans la section normale à l axe passant par J k. 6

7 Données : la tête de cambrage-pliage effectue une rotation autour de l axe (A, z) par rapport au bâti. le couple maximal délivré par le moteur est C max = 500 N.m. la tête de cambrage-pliage a pour centre B k (avec 0 k 4) et est excentrée de a = 50 mm le rayon de la tête de cambrage-pliage est b = 10 mm le diamètre du fil pour cette étude est d = 10 mm le rayon de pliage Ri souhaité est celui du coude 1: Ri = 10 mm le moment Mf est constant et vaut 75 N.m au cours du pliage Hypothèses : le contact entre la tête de cambrage-pliage et le fil est supposé ponctuel sans frottement au point C k (avec 0 k 4). on ne considère que les effets de la flexion du fil autour du coude 1. la fibre neutre passe toujours par les centres des sections droites du fil, au cours de cette opération de pliage. le couple moteur Cm est appliqué sur la tête de cambrage-pliage autour de l axe (A, z) Echelle des forces : 1 cm 1000 N Echelle des distances : 2 : 1 Q10. Déterminer graphiquement la position de B et C aux instants t 1 à t 4. On notera ces points B 1 à B 4 et C 1 à C 4. Q11. Pour chacune des cinq positions, calculer l effort qui est transmis entre la tête de cambragepliage et le fil pour obtenir le moment fléchissant Mf. On pourra s aider de la courbe présente sur le document ressource 7-b. Justifier votre démarche puis représenter graphiquement ces cinq forces. Q12. Pour chacune des cinq positions, en déduire le couple moteur nécessaire. Justifier votre démarche puis conclure. III. Validation des performances du dispositif d amenage (Fonction F2) Le dispositif d amenage (voir document ressource 2) permet d entraîner le fil par adhérence du dérouleur vers la tête de cambrage-pliage à l aide de galets. Il est nécessaire de pouvoir changer les galets ou de charger le fil du diamètre désiré. Les documents ressources 8-a, 8-b et 8-c proposent un schéma fonctionnel du dispositif d amenage, ainsi que deux schémas cinématiques représentant les deux phases de 7 Tournez la page S.V.P.

8
9 Tournez la page S.V.P.
10
11 Q30. Réaliser le guidage en rotation entre le bloc inférieur 4 et l arbre intermédiaire supportant le galet 21 et le pignon 14. On utilisera pour cela des composants des documents ressource 11 et 12. Pour des raisons de qualité de fabrication des pièces, les plans médians des quatre galets doivent être parfaitement confondus. Ceci entraîne que ce guidage en rotation devra être réglable axialement et démontable. On précisera les ajustements. Q31. Réaliser le guidage en translation entre les blocs supérieur 5 et inférieur 4. Q32. Réaliser la liaison hélicoïdale entre la vis 7 et le bloc supérieur 5, ainsi que celle entre la vis 7 et le bloc inférieur 4. Cette liaison devra être facilement démontable et devra permettre la mise sous pression des rondelles ressort 57. Une attention particulière sera portée sur la qualité graphique et le montage des éléments. 11

12 IN CHOISY D après documents fournis

13 065 DOCUMENTS RESSOURCES B Tournez la page S.V.P.

14
15 Tournez la page S.V.P.
16
17 Tournez la page S.V.P.
18
19 Tournez la page S.V.P.
20
21 Tournez la page S.V.P.
22 RESSOURCE 8-a : SCHÉMA FONCTIONNEL DU DISPOSITIF D AMENAGE stator du moteur 54 Z bloc supérieur 5 galet supérieur 3 vis de bridage 7 écrou supérieur 8 fil galet inférieur 21 écrou inférieur 6 rondelles ressorts 57 bloc inférieur 4 Le bloc supérieur 5 et les galets supérieurs 3 sont initialement en position haute. Les rondelles ressorts 57 sont précomprimées avant leur montage entre l écrou supérieur 8 et le bloc supérieur 5. L écrou supérieur 8 est alors en butée contre le bloc supérieur 5. Ce contact est modélisé sur ce schéma par une liaison appui plan de normale z. Phase d approche du fil (voir document ressource 8-b) Le rapprochement de l ensemble supérieur se fait par la rotation de la vis 7 à deux filetages actionnée par le motoréducteur de serrage 54. Pendant cette phase d approche, la compression des rondelles ressorts 5 ne varie pas. On modélise la liaison entre l écrou supérieur 8 et le bloc supérieur 5 par une liaison complète. Le fil pincé entre les galets sert de butée à la descente. Phase de serrage du fil (voir document ressource 8-c) Le motoréducteur de serrage 54 continue sa rotation. La compression des rondelles ressorts 5 augmente alors entre l écrou supérieur 8 et les galets supérieurs 3 pour créer l effort presseur réglable des galets sur le fil. L écrou supérieur 8 n est plus en butée contre le bloc supérieur 5. La liaison appui plan modélisant ce contact n est donc plus représentée. La rotation des galets 21 et 3 entraîne le fil.
23 Tournez la page S.V.P.
24
25 Tournez la page S.V.P.
26
27
28 065r L'usage de L usage de calculatrices est interdit. Cahier réponses Épreuve de Sciences Industrielles C Banque PT Tournez la page S.V.P Il est interdit aux candidats de signer leur composition ou d y mettre un signe quelconque pouvant indiquer sa provenance. C
29
30 Tournez la page S.V.P.
31
32 Tournez la page S.V.P.
33
34 Tournez la page S.V.P.
35
36 Tournez la page S.V.P.
37
38 Tournez la page S.V.P.
39
40
41 065 D
DISQUE DUR. Figure 1 Disque dur ouvert
 DISQUE DUR Le sujet est composé de 8 pages et d une feuille format A3 de dessins de détails, la réponse à toutes les questions sera rédigée sur les feuilles de réponses jointes au sujet. Toutes les questions
DISQUE DUR Le sujet est composé de 8 pages et d une feuille format A3 de dessins de détails, la réponse à toutes les questions sera rédigée sur les feuilles de réponses jointes au sujet. Toutes les questions
MOTO ELECTRIQUE. CPGE / Sciences Industrielles pour l Ingénieur TD06_08 Moto électrique DIAGRAMME DES INTER-ACTEURS UTILISATEUR ENVIRONNEMENT HUMAIN
 MOTO ELECTRIQUE MISE EN SITUATION La moto électrique STRADA EVO 1 est fabriquée par une société SUISSE, située à LUGANO. Moyen de transport alternatif, peut-être la solution pour concilier contraintes
MOTO ELECTRIQUE MISE EN SITUATION La moto électrique STRADA EVO 1 est fabriquée par une société SUISSE, située à LUGANO. Moyen de transport alternatif, peut-être la solution pour concilier contraintes
CONCOURS COMMUNS POLYTECHNIQUES
 CONCOURS COMMUNS POLYTECHNIQUES SYSTÈME DE LEVAGE À MULTIPLES COLONNES Les sociétés de transports publics des grandes agglomérations gèrent des réseaux comportant des bus et/ou des tramways. Ces sociétés
CONCOURS COMMUNS POLYTECHNIQUES SYSTÈME DE LEVAGE À MULTIPLES COLONNES Les sociétés de transports publics des grandes agglomérations gèrent des réseaux comportant des bus et/ou des tramways. Ces sociétés
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE
 BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR ÉPREUVE DU VENDREDI 20 JUIN 2014 Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR ÉPREUVE DU VENDREDI 20 JUIN 2014 Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un
MOTORISATION DIRECTDRIVE POUR NOS TELESCOPES. Par C.CAVADORE ALCOR-SYSTEM WETAL 2013 10 Nov
 1 MOTORISATION DIRECTDRIVE POUR NOS TELESCOPES Par C.CAVADORE ALCOR-SYSTEM WETAL 2013 10 Nov Pourquoi motoriser un télescope? 2 Pour compenser le mouvement de la terre (15 /h) Observation visuelle Les
1 MOTORISATION DIRECTDRIVE POUR NOS TELESCOPES Par C.CAVADORE ALCOR-SYSTEM WETAL 2013 10 Nov Pourquoi motoriser un télescope? 2 Pour compenser le mouvement de la terre (15 /h) Observation visuelle Les
Problèmes sur le chapitre 5
 Problèmes sur le chapitre 5 (Version du 13 janvier 2015 (10h38)) 501 Le calcul des réactions d appui dans les problèmes schématisés ci-dessous est-il possible par les équations de la statique Si oui, écrire
Problèmes sur le chapitre 5 (Version du 13 janvier 2015 (10h38)) 501 Le calcul des réactions d appui dans les problèmes schématisés ci-dessous est-il possible par les équations de la statique Si oui, écrire
TUTORIAL 1 ETUDE D UN MODELE SIMPLIFIE DE PORTIQUE PLAN ARTICULE
 TUTORIAL 1 ETUDE D UN MODELE SIMPLIFIE DE PORTIQUE PLAN ARTICULE L'objectif de ce tutorial est de décrire les différentes étapes dans CASTOR Concept / FEM permettant d'effectuer l'analyse statique d'une
TUTORIAL 1 ETUDE D UN MODELE SIMPLIFIE DE PORTIQUE PLAN ARTICULE L'objectif de ce tutorial est de décrire les différentes étapes dans CASTOR Concept / FEM permettant d'effectuer l'analyse statique d'une
CABLECAM de HYMATOM. Figure 1 : Schéma du système câblecam et détail du moufle vu de dessus.
 CABLECAM de HYMATOM La société Hymatom conçoit et fabrique des systèmes de vidéosurveillance. Le système câblecam (figure 1) est composé d un chariot mobile sur quatre roues posé sur deux câbles porteurs
CABLECAM de HYMATOM La société Hymatom conçoit et fabrique des systèmes de vidéosurveillance. Le système câblecam (figure 1) est composé d un chariot mobile sur quatre roues posé sur deux câbles porteurs
Chapitre 2 : Caractéristiques du mouvement d un solide
 Chapitre 2 : Caractéristiques du mouvement d un solide I Rappels : Référentiel : Le mouvement d un corps est décris par rapport à un corps de référence et dépend du choix de ce corps. Ce corps de référence
Chapitre 2 : Caractéristiques du mouvement d un solide I Rappels : Référentiel : Le mouvement d un corps est décris par rapport à un corps de référence et dépend du choix de ce corps. Ce corps de référence
1 Définition. 2 Systèmes matériels et solides. 3 Les actions mécaniques. Le système matériel : Il peut être un ensemble.un sous-ensemble..
 1 Définition GÉNÉRALITÉS Statique 1 2 Systèmes matériels et solides Le système matériel : Il peut être un ensemble.un sous-ensemble..une pièce mais aussi un liquide ou un gaz Le solide : Il est supposé
1 Définition GÉNÉRALITÉS Statique 1 2 Systèmes matériels et solides Le système matériel : Il peut être un ensemble.un sous-ensemble..une pièce mais aussi un liquide ou un gaz Le solide : Il est supposé
CIRCUITS DE PUISSANCE PNEUMATIQUES
 V ACTIONNEURS PNEUMATIQUES : 51 Généralités : Ils peuvent soulever, pousser, tirer, serrer, tourner, bloquer, percuter, abloquer, etc. Leur classification tient compte de la nature du fluide (pneumatique
V ACTIONNEURS PNEUMATIQUES : 51 Généralités : Ils peuvent soulever, pousser, tirer, serrer, tourner, bloquer, percuter, abloquer, etc. Leur classification tient compte de la nature du fluide (pneumatique
Vis à billes de précision à filets rectifiés
 sommaire Calculs : - Capacités de charges / Durée de vie - Vitesse et charges moyennes 26 - Rendement / Puissance motrice - Vitesse critique / Flambage 27 - Précharge / Rigidité 28 Exemples de calcul 29
sommaire Calculs : - Capacités de charges / Durée de vie - Vitesse et charges moyennes 26 - Rendement / Puissance motrice - Vitesse critique / Flambage 27 - Précharge / Rigidité 28 Exemples de calcul 29
Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant
 Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant I Présentation I.1 La roue autonome Ez-Wheel SAS est une entreprise française de technologie innovante fondée en 2009.
Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant I Présentation I.1 La roue autonome Ez-Wheel SAS est une entreprise française de technologie innovante fondée en 2009.
Oscillations libres des systèmes à deux degrés de liberté
 Chapitre 4 Oscillations libres des systèmes à deux degrés de liberté 4.1 Introduction Les systèmes qui nécessitent deux coordonnées indépendantes pour spécifier leurs positions sont appelés systèmes à
Chapitre 4 Oscillations libres des systèmes à deux degrés de liberté 4.1 Introduction Les systèmes qui nécessitent deux coordonnées indépendantes pour spécifier leurs positions sont appelés systèmes à
Monte charge de cuisine PRESENTATION DU MONTE CHARGE
 Nom.. Prénom.. Monte charge de cuisine Réalisation /0 Mise en service /0 Dépannage /0 PRESENTATION DU MONTE CHARGE M ~ S0 (Atu) S (appel pour monter) S (descente) H (descendez les déchets S.V.P.!) Sh Salle
Nom.. Prénom.. Monte charge de cuisine Réalisation /0 Mise en service /0 Dépannage /0 PRESENTATION DU MONTE CHARGE M ~ S0 (Atu) S (appel pour monter) S (descente) H (descendez les déchets S.V.P.!) Sh Salle
BACCALAURÉAT TECHNOLOGIQUE SESSION 2008 POSITIONNEUR DE PANNEAU SOLAIRE POUR CAMPING-CAR
 BACCALAURÉAT TECHNOLOGIQUE SÉRIE SCIENCES ET TECHNIQUES INDUSTRIELLES GÉNIE ÉLECTROTECHNIQUE SESSION 2008 ÉPREUVE: ÉTUDE DES CONSTRUCTIONS Durée: 4 heures Coefficient : 6 POSITIONNEUR DE PANNEAU SOLAIRE
BACCALAURÉAT TECHNOLOGIQUE SÉRIE SCIENCES ET TECHNIQUES INDUSTRIELLES GÉNIE ÉLECTROTECHNIQUE SESSION 2008 ÉPREUVE: ÉTUDE DES CONSTRUCTIONS Durée: 4 heures Coefficient : 6 POSITIONNEUR DE PANNEAU SOLAIRE
LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE
 LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE 2. L EFFET GYROSCOPIQUE Les lois physiques qui régissent le mouvement des véhicules terrestres sont des lois universelles qui s appliquent
LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE 2. L EFFET GYROSCOPIQUE Les lois physiques qui régissent le mouvement des véhicules terrestres sont des lois universelles qui s appliquent
(Exemple ici de calcul pour une Ducati 748 biposto, et également pour un S2R1000, équipé d un disque acier en fond de cloche, et ressorts d origine)
") Analyse de la charge transmise aux roulements de la roue dentée, notamment en rajoutant les efforts axiaux dus aux ressorts de l embrayage (via la cloche) (Exemple ici de calcul pour une Ducati 748 biposto,
Analyse de la charge transmise aux roulements de la roue dentée, notamment en rajoutant les efforts axiaux dus aux ressorts de l embrayage (via la cloche) (Exemple ici de calcul pour une Ducati 748 biposto,
Force de serrage 123 N.. 21800 N. Pince de préhension parallèle à 2 doigts PGN-plus 160 avec doigts de préhension spécifiques à la pièce à manipuler
 PGN-plus Tailles 40.. 380 Poids 0.08 kg.. 39.5 kg Force de serrage 123 N.. 21800 N Course par doigt 2 mm.. 45 mm Poids de pièce recommandé 0.62 kg.. 80.5 kg Exemple d application Poste de chargement de
PGN-plus Tailles 40.. 380 Poids 0.08 kg.. 39.5 kg Force de serrage 123 N.. 21800 N Course par doigt 2 mm.. 45 mm Poids de pièce recommandé 0.62 kg.. 80.5 kg Exemple d application Poste de chargement de
Cercle trigonométrique et mesures d angles
 Cercle trigonométrique et mesures d angles I) Le cercle trigonométrique Définition : Le cercle trigonométrique de centre O est un cercle qui a pour rayon 1 et qui est muni d un sens direct : le sens inverse
Cercle trigonométrique et mesures d angles I) Le cercle trigonométrique Définition : Le cercle trigonométrique de centre O est un cercle qui a pour rayon 1 et qui est muni d un sens direct : le sens inverse
OUTILLAGE MANUEL. Plomberie Outils spécifiques pour la plomberie. Clé serre-tube STILLSON ROTHENBERGER. Clé serre-tube en alliage ALUDUR ROTHENBERGER
 Clé serre-tube STILLSON ROTHENBERGER Travail à une main "par cliquet", machoire mobile sur ressorts, autoblocante. Pré-réglage rapide du diamètre de tube par marquage sur la machoire mobile. Écrou de réglage
Clé serre-tube STILLSON ROTHENBERGER Travail à une main "par cliquet", machoire mobile sur ressorts, autoblocante. Pré-réglage rapide du diamètre de tube par marquage sur la machoire mobile. Écrou de réglage
Épreuve E5 : Conception détaillée. Sous-épreuve E51 : Conception détaillée d une chaîne fonctionnelle
 BTS Conception et Réalisation de Systèmes Automatiques Épreuve E5 : Conception détaillée Sous-épreuve E51 : Conception détaillée d une chaîne fonctionnelle Session 2013 Durée : 4 h Coefficient : 3 Matériel
BTS Conception et Réalisation de Systèmes Automatiques Épreuve E5 : Conception détaillée Sous-épreuve E51 : Conception détaillée d une chaîne fonctionnelle Session 2013 Durée : 4 h Coefficient : 3 Matériel
Moto électrique Quantya'"
 BACCALAURÉAT TECHNOLOGIQUE SÉRIE SCIENCES ET TECHNIQUES INDUSTRIELLES GÉNIE ÉLECTROTECHNIQUE SESSION 2009 Épreuve: étude des constructions Durée : 4 heures Coefficient: 6 Moto électrique Quantya'" AUCUN
BACCALAURÉAT TECHNOLOGIQUE SÉRIE SCIENCES ET TECHNIQUES INDUSTRIELLES GÉNIE ÉLECTROTECHNIQUE SESSION 2009 Épreuve: étude des constructions Durée : 4 heures Coefficient: 6 Moto électrique Quantya'" AUCUN
DERAILLEUR AVANT SR / R / CH - GAMME ACTUELLE
 DERAILLEUR AVANT SR / R / CH - GAMME ACTUELLE 1 - SPÉCIFICITÉS TECHNIQUES 55 2 - COMPATIBILITÉ (GAMME ACTUELLE) ATTENTION! Les associations différentes de celles figurant dans le tableau pourraient entraîner
DERAILLEUR AVANT SR / R / CH - GAMME ACTUELLE 1 - SPÉCIFICITÉS TECHNIQUES 55 2 - COMPATIBILITÉ (GAMME ACTUELLE) ATTENTION! Les associations différentes de celles figurant dans le tableau pourraient entraîner
Processus de déroulage à la perfection
 Processus de déroulage à la perfection Les installations Forstner se rentabilisent. Depuis 1960, Forstner développe et fabrique des machines pour travail de tôle. Depuis le début, la simplicité de manipulation
Processus de déroulage à la perfection Les installations Forstner se rentabilisent. Depuis 1960, Forstner développe et fabrique des machines pour travail de tôle. Depuis le début, la simplicité de manipulation
Acquisition et conditionnement de l information Les capteurs
 Acquisition et conditionnement de l information Les capteurs COURS 1. Exemple d une chaîne d acquisition d une information L'acquisition de la grandeur physique est réalisée par un capteur qui traduit
Acquisition et conditionnement de l information Les capteurs COURS 1. Exemple d une chaîne d acquisition d une information L'acquisition de la grandeur physique est réalisée par un capteur qui traduit
Voyez la réponse à cette question dans ce chapitre. www.hometownroofingcontractors.com/blog/9-reasons-diy-rednecks-should-never-fix-their-own-roof
 Une échelle est appuyée sur un mur. S il n y a que la friction statique avec le sol, quel est l angle minimum possible entre le sol et l échelle pour que l échelle ne glisse pas et tombe au sol? www.hometownroofingcontractors.com/blog/9-reasons-diy-rednecks-should-never-fix-their-own-roof
Une échelle est appuyée sur un mur. S il n y a que la friction statique avec le sol, quel est l angle minimum possible entre le sol et l échelle pour que l échelle ne glisse pas et tombe au sol? www.hometownroofingcontractors.com/blog/9-reasons-diy-rednecks-should-never-fix-their-own-roof
Atelier B : Maintivannes
 Atelier B : Maintivannes BMA03 : Procédure de réglage de la vanne de régulation CAMFLEX BMA03 : Procédure de réglage de la vanne CAMFLEX Page 1 Buts de l exercice : - Réaliser la manutention d un élément
Atelier B : Maintivannes BMA03 : Procédure de réglage de la vanne de régulation CAMFLEX BMA03 : Procédure de réglage de la vanne CAMFLEX Page 1 Buts de l exercice : - Réaliser la manutention d un élément
Guide pour l analyse de l existant technique. Partie 3
 Partie 3 La Liaison Pivot sur roulement : Le Composant ROULEMENT 0 Introduction Le but de ce guide est de vous permettre une meilleure rédaction des rapports de Bureaux d Études que vous aurez à nous remettre
Partie 3 La Liaison Pivot sur roulement : Le Composant ROULEMENT 0 Introduction Le but de ce guide est de vous permettre une meilleure rédaction des rapports de Bureaux d Études que vous aurez à nous remettre
(51) Int Cl.: B23P 19/00 (2006.01) B23P 19/04 (2006.01) F01L 1/053 (2006.01)
 Int Cl.: B23P 19/00 (2006.01) B23P 19/04 (2006.01) F01L 1/053 (2006.01)") (19) (12) DEMANDE DE BREVET EUROPEEN (11) EP 1 886 760 A1 (43) Date de publication: 13.02.2008 Bulletin 2008/07 (21) Numéro de dépôt: 0711197.6 (1) Int Cl.: B23P 19/00 (2006.01) B23P 19/04 (2006.01) F01L
(19) (12) DEMANDE DE BREVET EUROPEEN (11) EP 1 886 760 A1 (43) Date de publication: 13.02.2008 Bulletin 2008/07 (21) Numéro de dépôt: 0711197.6 (1) Int Cl.: B23P 19/00 (2006.01) B23P 19/04 (2006.01) F01L
Mesure de la dépense énergétique
 Mesure de la dépense énergétique Bioénergétique L énergie existe sous différentes formes : calorifique, mécanique, électrique, chimique, rayonnante, nucléaire. La bioénergétique est la branche de la biologie
Mesure de la dépense énergétique Bioénergétique L énergie existe sous différentes formes : calorifique, mécanique, électrique, chimique, rayonnante, nucléaire. La bioénergétique est la branche de la biologie
Angles orientés et fonctions circulaires ( En première S )
") Angles orientés et fonctions circulaires ( En première S ) Dernière mise à jour : Jeudi 01 Septembre 010 Vincent OBATON, Enseignant au lycée Stendhal de Grenoble (Année 006-007) Lycée Stendhal, Grenoble
Angles orientés et fonctions circulaires ( En première S ) Dernière mise à jour : Jeudi 01 Septembre 010 Vincent OBATON, Enseignant au lycée Stendhal de Grenoble (Année 006-007) Lycée Stendhal, Grenoble
Information. BASES LITTERAIRES Etre capable de répondre à une question du type «la valeur trouvée respecte t-elle le cahier des charges?
 Compétences générales Avoir des piles neuves, ou récentes dans sa machine à calculer. Etre capable de retrouver instantanément une info dans sa machine. Prendre une bouteille d eau. Prendre CNI + convocation.
Compétences générales Avoir des piles neuves, ou récentes dans sa machine à calculer. Etre capable de retrouver instantanément une info dans sa machine. Prendre une bouteille d eau. Prendre CNI + convocation.
F411 - Courbes Paramétrées, Polaires
 1/43 Courbes Paramétrées Courbes polaires Longueur d un arc, Courbure F411 - Courbes Paramétrées, Polaires Michel Fournié [email protected] http://www.math.univ-toulouse.fr/ fournie/ Année 2012/2013
1/43 Courbes Paramétrées Courbes polaires Longueur d un arc, Courbure F411 - Courbes Paramétrées, Polaires Michel Fournié [email protected] http://www.math.univ-toulouse.fr/ fournie/ Année 2012/2013
Banc d études des structures Etude de résistances de matériaux (RDM) et structures mécaniques
 et structures mécaniques") Banc d études des structures Etude de résistances de matériaux (RDM) et structures mécaniques Descriptif du support pédagogique Le banc d essais des structures permet de réaliser des essais et des études
Banc d études des structures Etude de résistances de matériaux (RDM) et structures mécaniques Descriptif du support pédagogique Le banc d essais des structures permet de réaliser des essais et des études
Corrigé Exercice 1 : BRIDE HYDRAULIQUE AVEC HYPOTHÈSE PROBLÈME PLAN.
 TD 6 corrigé - PFS Résolution analytique (Loi entrée-sortie statique) Page 1/1 Corrigé Exercice 1 : BRIDE HYDRAULIQUE AVEC HYPOTHÈSE PROBLÈME PLAN. Question : Réaliser le graphe de structure, puis compléter
TD 6 corrigé - PFS Résolution analytique (Loi entrée-sortie statique) Page 1/1 Corrigé Exercice 1 : BRIDE HYDRAULIQUE AVEC HYPOTHÈSE PROBLÈME PLAN. Question : Réaliser le graphe de structure, puis compléter
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE
 BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE Épreuve de sciences de l ingénieur Session 2013 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un enseignement de spécialité autre
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE Épreuve de sciences de l ingénieur Session 2013 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un enseignement de spécialité autre
Mathématiques et petites voitures
 Mathématiques et petites voitures Thomas Lefebvre 10 avril 2015 Résumé Ce document présente diérentes applications des mathématiques dans le domaine du slot-racing. Table des matières 1 Périmètre et circuit
Mathématiques et petites voitures Thomas Lefebvre 10 avril 2015 Résumé Ce document présente diérentes applications des mathématiques dans le domaine du slot-racing. Table des matières 1 Périmètre et circuit
Etude du SIMULATEUR DE VOL «FLY-HO»
 ECOLE NATIONALE DE L AVIATION CIVILE Session 212 CONCOURS DE RECRUTEMENT D ELEVES INGENIEURS DU CONTROLE DE LA NAVIGATION AERIENNE Epreuve optionnelle obligatoire de SCIENCES INDUSTRIELLES POUR L INGENIEUR
ECOLE NATIONALE DE L AVIATION CIVILE Session 212 CONCOURS DE RECRUTEMENT D ELEVES INGENIEURS DU CONTROLE DE LA NAVIGATION AERIENNE Epreuve optionnelle obligatoire de SCIENCES INDUSTRIELLES POUR L INGENIEUR
Chapitre 0 Introduction à la cinématique
 Chapitre 0 Introduction à la cinématique Plan Vitesse, accélération Coordonnées polaires Exercices corrigés Vitesse, Accélération La cinématique est l étude du mouvement Elle suppose donc l existence à
Chapitre 0 Introduction à la cinématique Plan Vitesse, accélération Coordonnées polaires Exercices corrigés Vitesse, Accélération La cinématique est l étude du mouvement Elle suppose donc l existence à
CONCOURS GÉNÉRAL DES LYCÉES Session 2014. Durée 5 heures. Corrigé. Poséidon au secours d Éole pour produire l énergie électrique
 CONCOURS GÉNÉRAL DES LYCÉES Session 2014 Durée 5 heures Corrigé Poséidon au secours d Éole pour produire l énergie électrique Partie 1 - analyse du besoin Q 1. À l aide du diagramme FAST du document technique
CONCOURS GÉNÉRAL DES LYCÉES Session 2014 Durée 5 heures Corrigé Poséidon au secours d Éole pour produire l énergie électrique Partie 1 - analyse du besoin Q 1. À l aide du diagramme FAST du document technique
SCIENCES INDUSTRIELLES POUR L INGÉNIEUR. Partie I - Analyse système
 SCIENCES INDUSTRIELLES POUR L INGÉNIEUR COMPORTEMENT DYNAMIQUE D UN VEHICULE AUTO-BALANCÉ DE TYPE SEGWAY Partie I - Analyse système Poignée directionnelle Barre d appui Plate-forme Photographies 1 Le support
SCIENCES INDUSTRIELLES POUR L INGÉNIEUR COMPORTEMENT DYNAMIQUE D UN VEHICULE AUTO-BALANCÉ DE TYPE SEGWAY Partie I - Analyse système Poignée directionnelle Barre d appui Plate-forme Photographies 1 Le support
Analyse statique d une pièce
 Analyse statique d une pièce Contrainte de Von Mises sur une chape taillée dans la masse 1 Comportement d un dynamomètre On considère le dynamomètre de forme globalement circulaire, excepté les bossages
Analyse statique d une pièce Contrainte de Von Mises sur une chape taillée dans la masse 1 Comportement d un dynamomètre On considère le dynamomètre de forme globalement circulaire, excepté les bossages
N 15 PLOMBERIE /CHAUFFAGE SUJET
 PLOMBERIE /CHAUFFAGE SUJET Sélections régionales 2012 SOMMAIRE A. Explication du sujet... 3/4 B. Déroulement du concours... 5 C. Matériaux et consommables... 6/7 D. Caisse à outils... 8 E. Barème de correction...
PLOMBERIE /CHAUFFAGE SUJET Sélections régionales 2012 SOMMAIRE A. Explication du sujet... 3/4 B. Déroulement du concours... 5 C. Matériaux et consommables... 6/7 D. Caisse à outils... 8 E. Barème de correction...
uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»
![uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»](/thumbs/18/800414.jpg "uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»") TopChair S c Première partie Présentation du système Plus d autonomie pour plus de liberté! TopChair S c offre aux personnes à mobilité réduite une nouvelle possibilité de se déplacer sans assistance à
TopChair S c Première partie Présentation du système Plus d autonomie pour plus de liberté! TopChair S c offre aux personnes à mobilité réduite une nouvelle possibilité de se déplacer sans assistance à
Représentation géométrique d un nombre complexe
 CHAPITRE 1 NOMBRES COMPLEXES 1 Représentation géométrique d un nombre complexe 1. Ensemble des nombres complexes Soit i le nombre tel que i = 1 L ensemble des nombres complexes est l ensemble des nombres
CHAPITRE 1 NOMBRES COMPLEXES 1 Représentation géométrique d un nombre complexe 1. Ensemble des nombres complexes Soit i le nombre tel que i = 1 L ensemble des nombres complexes est l ensemble des nombres
Vis à béton FBS et FSS
 Vis à béton FBS et FSS Un montage rapide et de hautes performances. ETA-11/0093 ETAG 001-6 Usage multiple pour application non structurelle dans le béton Z-21.8-2015 ETA-11/0095 ETAG 001-3 Option 1 pour
Vis à béton FBS et FSS Un montage rapide et de hautes performances. ETA-11/0093 ETAG 001-6 Usage multiple pour application non structurelle dans le béton Z-21.8-2015 ETA-11/0095 ETAG 001-3 Option 1 pour
COMPOSITION DE PHYSIQUE ET SCIENCES DE L INGÉNIEUR. Lecteurs optiques numériques
 ÉCOLE POLYTECHNIQUE FILIÈRE MP Option Physique et Sciences de l Ingénieur CONCOURS D ADMISSION 2010 COMPOSITION DE PHYSIQUE ET SCIENCES DE L INGÉNIEUR (Durée : 4 heures) L utilisation des calculatrices
ÉCOLE POLYTECHNIQUE FILIÈRE MP Option Physique et Sciences de l Ingénieur CONCOURS D ADMISSION 2010 COMPOSITION DE PHYSIQUE ET SCIENCES DE L INGÉNIEUR (Durée : 4 heures) L utilisation des calculatrices
Cours IV Mise en orbite
 Introduction au vol spatial Cours IV Mise en orbite If you don t know where you re going, you ll probably end up somewhere else. Yogi Berra, NY Yankees catcher v1.2.8 by-sa Olivier Cleynen Introduction
Introduction au vol spatial Cours IV Mise en orbite If you don t know where you re going, you ll probably end up somewhere else. Yogi Berra, NY Yankees catcher v1.2.8 by-sa Olivier Cleynen Introduction
Vue 2D / 3D / Dessin / Cotation Utilise : Logiciel edrawings Fichier.EPRT Dossier Tp-eDrawings
 Vue 2D / 3D / Dessin / Cotation Utilise : Logiciel edrawings.eprt Dossier Tp-eDrawings TP EDRAWINGS INITIATION A LA CONCEPTION ASSISTÉE PAR ORDINATEUR (CAO) Les icônes Zoom au mieux pour obtenir un affichage
Vue 2D / 3D / Dessin / Cotation Utilise : Logiciel edrawings.eprt Dossier Tp-eDrawings TP EDRAWINGS INITIATION A LA CONCEPTION ASSISTÉE PAR ORDINATEUR (CAO) Les icônes Zoom au mieux pour obtenir un affichage
Baccalauréat technologique annale zéro
 éduscol Baccalauréat technologique STI2D Enseignements technologiques transversaux Annale zéro n 2 (Coefficient 8 Durée 4 heures) Aucun document autorisé Calculatrice autorisée ÉTUDE DU BARRAGE DU MONT
éduscol Baccalauréat technologique STI2D Enseignements technologiques transversaux Annale zéro n 2 (Coefficient 8 Durée 4 heures) Aucun document autorisé Calculatrice autorisée ÉTUDE DU BARRAGE DU MONT
Rappels et compléments, première partie : Nombres complexes et applications à la géométrie
 Rappels et compléments, première partie : Nombres complexes et applications à la géométrie 1 Définition des nombres complexes On définit sur les couples de réels une loi d addition comme suit : (x; y)
Rappels et compléments, première partie : Nombres complexes et applications à la géométrie 1 Définition des nombres complexes On définit sur les couples de réels une loi d addition comme suit : (x; y)
LA PUISSANCE DES MOTEURS. Avez-vous déjà feuilleté le catalogue d un grand constructeur automobile?
 LA PUISSANCE DES MOTEURS Avez-vous déjà feuilleté le catalogue d un grand constructeur automobile? Chaque modèle y est décliné en plusieurs versions, les différences portant essentiellement sur la puissance
LA PUISSANCE DES MOTEURS Avez-vous déjà feuilleté le catalogue d un grand constructeur automobile? Chaque modèle y est décliné en plusieurs versions, les différences portant essentiellement sur la puissance
TSTI 2D CH X : Exemples de lois à densité 1
 TSTI 2D CH X : Exemples de lois à densité I Loi uniforme sur ab ; ) Introduction Dans cette activité, on s intéresse à la modélisation du tirage au hasard d un nombre réel de l intervalle [0 ;], chacun
TSTI 2D CH X : Exemples de lois à densité I Loi uniforme sur ab ; ) Introduction Dans cette activité, on s intéresse à la modélisation du tirage au hasard d un nombre réel de l intervalle [0 ;], chacun
Equipement d un forage d eau potable
 Equipement d un d eau potable Mise en situation La Société des Sources de Soultzmatt est une Société d Economie Mixte (SEM) dont l activité est l extraction et l embouteillage d eau de source en vue de
Equipement d un d eau potable Mise en situation La Société des Sources de Soultzmatt est une Société d Economie Mixte (SEM) dont l activité est l extraction et l embouteillage d eau de source en vue de
1 radian. De même, la longueur d un arc de cercle de rayon R et dont l angle au centre a pour mesure α radians est α R. R AB =R.
 Angles orientés Trigonométrie I. Préliminaires. Le radian Définition B R AB =R C O radian R A Soit C un cercle de centre O. Dire que l angle géométrique AOB a pour mesure radian signifie que la longueur
Angles orientés Trigonométrie I. Préliminaires. Le radian Définition B R AB =R C O radian R A Soit C un cercle de centre O. Dire que l angle géométrique AOB a pour mesure radian signifie que la longueur
Roulements à une rangée de billes de génération C. Information Technique Produit
 Roulements à une rangée de billes de génération C Information Technique Produit Sommaire Caractéristiques 2 Avantages des roulements à billes FAG de génération C 2 Etanchéité et lubrification 2 Température
Roulements à une rangée de billes de génération C Information Technique Produit Sommaire Caractéristiques 2 Avantages des roulements à billes FAG de génération C 2 Etanchéité et lubrification 2 Température
Long Carbon Europe Sections and Merchant Bars. Poutrelle Angelina. L alchimie réussie entre résistance, légèreté et transparence
 Long Carbon Europe Sections and Merchant Bars Poutrelle Angelina L alchimie réussie entre résistance, légèreté et transparence Poutrelle Angelina Une idée audacieuse adaptée à un produit industriel Plus
Long Carbon Europe Sections and Merchant Bars Poutrelle Angelina L alchimie réussie entre résistance, légèreté et transparence Poutrelle Angelina Une idée audacieuse adaptée à un produit industriel Plus
Chapitre 0 : Généralités sur la robotique 1/125
 Chapitre 0 : Généralités sur la robotique 1/125 Historique de la robotique Étymologie : le mot tchèque robota (travail). Définition : un robot est un système mécanique polyarticulé mû par des actionneurs
Chapitre 0 : Généralités sur la robotique 1/125 Historique de la robotique Étymologie : le mot tchèque robota (travail). Définition : un robot est un système mécanique polyarticulé mû par des actionneurs
ANALYSE DES DIFFERENTES FONCTIONNALITES DU FAUTEUIL
 Dossier remis aux candidats: Un énoncé comportant 24 pages de texte en 5 parties : ANALYSE DES DIFFERENTES FONCTIONNALITES DU FAUTEUIL (Partie I page 4), ANALYSE DES FONCTIONS TECHNIQUES FT31 ET FT32 (Partie
Dossier remis aux candidats: Un énoncé comportant 24 pages de texte en 5 parties : ANALYSE DES DIFFERENTES FONCTIONNALITES DU FAUTEUIL (Partie I page 4), ANALYSE DES FONCTIONS TECHNIQUES FT31 ET FT32 (Partie
7200S FRA. Contacteur Statique. Manuel Utilisateur. Contrôle 2 phases
 7200S Contacteur Statique FRA Contrôle 2 phases Manuel Utilisateur Chapitre 2 2. INSTALLATI Sommaire Page 2.1. Sécurité lors de l installation...............................2-2 2.2. Montage.................................................2-3
7200S Contacteur Statique FRA Contrôle 2 phases Manuel Utilisateur Chapitre 2 2. INSTALLATI Sommaire Page 2.1. Sécurité lors de l installation...............................2-2 2.2. Montage.................................................2-3
Figure 1 : représentation des différents écarts
 ulletin officiel spécial n 9 du 30 septembre 2010 Annexe SIENES DE L INGÉNIEUR YLE TERMINAL DE LA SÉRIE SIENTIFIQUE I - Objectifs généraux Notre société devra relever de nombreux défis dans les prochaines
ulletin officiel spécial n 9 du 30 septembre 2010 Annexe SIENES DE L INGÉNIEUR YLE TERMINAL DE LA SÉRIE SIENTIFIQUE I - Objectifs généraux Notre société devra relever de nombreux défis dans les prochaines
COURS D INDUSTRIES... Techniques d impression. Pascal Prévôt Fabien Rocher
 COURS D INDUSTRIES......... G R A P H I Q U E S Techniques d impression Pascal Prévôt Fabien Rocher LES FORMATS DE PAPIER LES FORMATS DE PAPIER Introduction L imprimeur utilise du papier en bobine ou en
COURS D INDUSTRIES......... G R A P H I Q U E S Techniques d impression Pascal Prévôt Fabien Rocher LES FORMATS DE PAPIER LES FORMATS DE PAPIER Introduction L imprimeur utilise du papier en bobine ou en
Moteurs pas à pas Michel ABIGNOLI Clément GOELDEL Principe des moteurs pas à pas Structures et modèles de description Alimentation Commande
 Moteurs pas à pas par Michel ABIGNOLI Professeur d Université à l ENSEM (École Nationale Supérieure d Électricité et de Mécanique de Nancy) et Clément GOELDEL Professeur d Université à la Faculté des Sciences
Moteurs pas à pas par Michel ABIGNOLI Professeur d Université à l ENSEM (École Nationale Supérieure d Électricité et de Mécanique de Nancy) et Clément GOELDEL Professeur d Université à la Faculté des Sciences
Chapitre 5. Le ressort. F ext. F ressort
 Chapitre 5 Le ressort Le ressort est un élément fondamental de plusieurs mécanismes. Il existe plusieurs types de ressorts (à boudin, à lame, spiral etc.) Que l on comprime ou étire un ressort, tel que
Chapitre 5 Le ressort Le ressort est un élément fondamental de plusieurs mécanismes. Il existe plusieurs types de ressorts (à boudin, à lame, spiral etc.) Que l on comprime ou étire un ressort, tel que
SEO 200. Banc d étude du positionnement angulaire d une éolienne face au vent DESCRIPTIF APPLICATIONS PEDAGOGIQUES
 Banc d étude du positionnement angulaire d une éolienne face au vent DESCRIPTIF Le banc SEO 200 permet d étudier et de paramétrer les boucles d asservissement de vitesse et position d une nacelle d éolienne
Banc d étude du positionnement angulaire d une éolienne face au vent DESCRIPTIF Le banc SEO 200 permet d étudier et de paramétrer les boucles d asservissement de vitesse et position d une nacelle d éolienne
TP 7 : oscillateur de torsion
 TP 7 : oscillateur de torsion Objectif : étude des oscillations libres et forcées d un pendule de torsion 1 Principe général 1.1 Définition Un pendule de torsion est constitué par un fil large (métallique)
TP 7 : oscillateur de torsion Objectif : étude des oscillations libres et forcées d un pendule de torsion 1 Principe général 1.1 Définition Un pendule de torsion est constitué par un fil large (métallique)
www.devico.com Vente Location Service Sales - Rentals - Service www.devico.com
 Produits Devico products Devico www.devico.com www.devico.com Vente Location Service Sales - Rentals - Service Français English Carottage directionnel DeviDrill Le DeviDrill est un carottier à câble orientable.
Produits Devico products Devico www.devico.com www.devico.com Vente Location Service Sales - Rentals - Service Français English Carottage directionnel DeviDrill Le DeviDrill est un carottier à câble orientable.
La presse plieuse de référence
 La presse plieuse de référence Plus de 125 000 presses plieuses et 1500 cellules de pliage installées! Hormis AMADA, quel constructeur peut se prévaloir d un tel bilan? Les raisons de ce succès sont simples
La presse plieuse de référence Plus de 125 000 presses plieuses et 1500 cellules de pliage installées! Hormis AMADA, quel constructeur peut se prévaloir d un tel bilan? Les raisons de ce succès sont simples
Généralités. Aperçu. Introduction. Précision. Instruction de montage. Lubrification. Conception. Produits. Guides à brides FNS. Guides standards GNS
 Généralités Aperçu Introduction Précision Instruction de montage Lubrification Conception page............................. 4............................. 5............................. 6.............................
Généralités Aperçu Introduction Précision Instruction de montage Lubrification Conception page............................. 4............................. 5............................. 6.............................
EP 2 063 325 A2 (19) (11) EP 2 063 325 A2 (12) DEMANDE DE BREVET EUROPEEN. (43) Date de publication: 27.05.2009 Bulletin 2009/22
 (11) EP 2 063 325 A2 (12) DEMANDE DE BREVET EUROPEEN. (43) Date de publication: 27.05.2009 Bulletin 2009/22") (19) (12) DEMANDE DE BREVET EUROPEEN (11) EP 2 063 325 A2 (43) Date de publication: 27.05.2009 Bulletin 2009/22 (51) Int Cl.: G04B 17/06 (2006.01) G04B 17/34 (2006.01) (21) Numéro de dépôt: 08167317.0
(19) (12) DEMANDE DE BREVET EUROPEEN (11) EP 2 063 325 A2 (43) Date de publication: 27.05.2009 Bulletin 2009/22 (51) Int Cl.: G04B 17/06 (2006.01) G04B 17/34 (2006.01) (21) Numéro de dépôt: 08167317.0
Module d Electricité. 2 ème partie : Electrostatique. Fabrice Sincère (version 3.0.1) http://pagesperso-orange.fr/fabrice.sincere
 http://pagesperso-orange.fr/fabrice.sincere") Module d Electricité 2 ème partie : Electrostatique Fabrice Sincère (version 3.0.1) http://pagesperso-orange.fr/fabrice.sincere 1 Introduction Principaux constituants de la matière : - protons : charge
Module d Electricité 2 ème partie : Electrostatique Fabrice Sincère (version 3.0.1) http://pagesperso-orange.fr/fabrice.sincere 1 Introduction Principaux constituants de la matière : - protons : charge
Système P Cellules. Certifiés pour plus de sécurité
 Système P Cellules Tableaux BT Prisma Plus Certifiés pour plus de sécurité Prisma Plus, une offre pensée pour plus de professionnalisme Avec le système P Prisma Plus, Schneider Electric propose des solutions
Système P Cellules Tableaux BT Prisma Plus Certifiés pour plus de sécurité Prisma Plus, une offre pensée pour plus de professionnalisme Avec le système P Prisma Plus, Schneider Electric propose des solutions
Plieuses semi-automatisées de nouvelle génération
 Plieuses semi-automatisées de nouvelle génération NOUVEAU DESIGN ET DERNIERES TECHNOLOGIES La plieuse AFC 564 A ou 566 A apporte la meilleure alternative à vos problématiques de délais de fabrication et
Plieuses semi-automatisées de nouvelle génération NOUVEAU DESIGN ET DERNIERES TECHNOLOGIES La plieuse AFC 564 A ou 566 A apporte la meilleure alternative à vos problématiques de délais de fabrication et
FONCTION DE DEMANDE : REVENU ET PRIX
 FONCTION DE DEMANDE : REVENU ET PRIX 1. L effet d une variation du revenu. Les lois d Engel a. Conditions du raisonnement : prix et goûts inchangés, variation du revenu (statique comparative) b. Partie
FONCTION DE DEMANDE : REVENU ET PRIX 1. L effet d une variation du revenu. Les lois d Engel a. Conditions du raisonnement : prix et goûts inchangés, variation du revenu (statique comparative) b. Partie
Monte-escaliers électriques
 Monte-escaliers électriques LIFTKAR PT Fiable, polyvalent, ingénieux Que vous soyez un utilisateur de fauteuil roulant, une personne à mobilité réduite, une aide à domicile ou un professionnel de santé
Monte-escaliers électriques LIFTKAR PT Fiable, polyvalent, ingénieux Que vous soyez un utilisateur de fauteuil roulant, une personne à mobilité réduite, une aide à domicile ou un professionnel de santé
AUTRES ASPECTS DU GPS. Partie I : tolérance de Battement Partie II : tolérancement par frontières
 AUTRES ASPECTS DU GPS Partie I : tolérance de Battement Partie II : tolérancement par frontières 1 Partie I Tolérance de battement Défaut de Battement Défautconjuguéde forme, orientation et position, constatélorsde
AUTRES ASPECTS DU GPS Partie I : tolérance de Battement Partie II : tolérancement par frontières 1 Partie I Tolérance de battement Défaut de Battement Défautconjuguéde forme, orientation et position, constatélorsde
Centre de tournage. et de fraisage CNC TNX65/42
 Centre de tournage et de fraisage CNC TNX65/42 Le tour TRAUB TNX65/42 pose de nouveaux jalons dans l'usinage à haute performance. Le concept de machine futuriste avec l'incomparable nouvelle unité de fraisage
Centre de tournage et de fraisage CNC TNX65/42 Le tour TRAUB TNX65/42 pose de nouveaux jalons dans l'usinage à haute performance. Le concept de machine futuriste avec l'incomparable nouvelle unité de fraisage
ITAS Escaliers industriels et plate-formes de travail
 ITAS Escaliers industriels et plate-formes de travail Plate-forme de travail avec escalier sur rotative offset. Les constructions ITAS facilitent le montage des balustrades simples ou des escaliers et
ITAS Escaliers industriels et plate-formes de travail Plate-forme de travail avec escalier sur rotative offset. Les constructions ITAS facilitent le montage des balustrades simples ou des escaliers et
Angles orientés et trigonométrie
 Chapitre Angles orientés et trigonométrie Ce que dit le programme : CONTENUS CAPACITÉS ATTENDUES COMMENTAIRES Trigonométrie Cercle trigonométrique. Radian. Mesure d un angle orienté, mesure principale.
Chapitre Angles orientés et trigonométrie Ce que dit le programme : CONTENUS CAPACITÉS ATTENDUES COMMENTAIRES Trigonométrie Cercle trigonométrique. Radian. Mesure d un angle orienté, mesure principale.
Electrotechnique: Electricité Avion,
 Electrotechnique: Electricité Avion, La machine à Courant Continu Dr Franck Cazaurang, Maître de conférences, Denis Michaud, Agrégé génie Electrique, Institut de Maintenance Aéronautique UFR de Physique,
Electrotechnique: Electricité Avion, La machine à Courant Continu Dr Franck Cazaurang, Maître de conférences, Denis Michaud, Agrégé génie Electrique, Institut de Maintenance Aéronautique UFR de Physique,
Relais d'arrêt d'urgence, protecteurs mobiles
 PNOZ Relais jusqu'en d'arrêt 11 catégorie d'urgence, 4, EN 954-1 protecteurs mobiles Bloc logique de sécurité pour la surveillance de poussoirs d'arrêt d'urgence et de protecteurs mobiles Homologations
PNOZ Relais jusqu'en d'arrêt 11 catégorie d'urgence, 4, EN 954-1 protecteurs mobiles Bloc logique de sécurité pour la surveillance de poussoirs d'arrêt d'urgence et de protecteurs mobiles Homologations
30ème Concours «Un des Meilleurs Apprentis de France» Session : 2015. Promotion : Monsieur Bernard WERNER INSTALLATEUR THERMIQUE
 SOCIETE NATIONALE DES MEILLEURS OUVRIERS DE FRANCE Organisatrice du concours national «Un des Meilleurs Apprentis de France» 16 rue Saint-Nicolas 75012 PARIS Tél. : 01 43 42 33 02 Mail : [email protected]
SOCIETE NATIONALE DES MEILLEURS OUVRIERS DE FRANCE Organisatrice du concours national «Un des Meilleurs Apprentis de France» 16 rue Saint-Nicolas 75012 PARIS Tél. : 01 43 42 33 02 Mail : [email protected]
ANNEXE J POTEAUX TESTÉS SELON UN CHARGEMENT STATIQUE ET TESTÉS SELON UN CHARGEMENT CYCLIQUE ET STATIQUE
 562 ANNEXE J POTEAUX TESTÉS SELON UN CHARGEMENT STATIQUE ET TESTÉS SELON UN CHARGEMENT CYCLIQUE ET STATIQUE 563 TABLE DES MATIÈRES ANNEXE J... 562 POTEAUX TESTÉS SELON UN CHARGEMENT STATIQUE ET TESTÉS
562 ANNEXE J POTEAUX TESTÉS SELON UN CHARGEMENT STATIQUE ET TESTÉS SELON UN CHARGEMENT CYCLIQUE ET STATIQUE 563 TABLE DES MATIÈRES ANNEXE J... 562 POTEAUX TESTÉS SELON UN CHARGEMENT STATIQUE ET TESTÉS
Test : principe fondamental de la dynamique et aspect énergétique
 Durée : 45 minutes Objectifs Test : principe fondamental de la dynamique et aspect énergétique Projection de forces. Calcul de durée d'accélération / décélération ou d'accélération / décélération ou de
Durée : 45 minutes Objectifs Test : principe fondamental de la dynamique et aspect énergétique Projection de forces. Calcul de durée d'accélération / décélération ou d'accélération / décélération ou de
LE GÉNIE PARASISMIQUE
 LE GÉNIE PARASISMIQUE Concevoir et construire un bâtiment pour qu il résiste aux séismes 1 Présentation de l intervenant Activité : Implantation : B.E.T. structures : Ingénierie générale du bâtiment. Siège
LE GÉNIE PARASISMIQUE Concevoir et construire un bâtiment pour qu il résiste aux séismes 1 Présentation de l intervenant Activité : Implantation : B.E.T. structures : Ingénierie générale du bâtiment. Siège
Pose avec volet roulant
 Pose avec volet roulant Coffre volet roulant Coulisse MONTAGE 2 PERSONNES MINIMUM La quincaillerie 4,2 x 25 Les outils (x 10) 3,5 x 9,5 (x 10) (x 1) (x 4) 3 2 1 (x 1) (x 4) 7 1 Positionnez les coulisses
Pose avec volet roulant Coffre volet roulant Coulisse MONTAGE 2 PERSONNES MINIMUM La quincaillerie 4,2 x 25 Les outils (x 10) 3,5 x 9,5 (x 10) (x 1) (x 4) 3 2 1 (x 1) (x 4) 7 1 Positionnez les coulisses
Chafa Azzedine - Faculté de Physique U.S.T.H.B 1
 Chafa Azzedine - Faculté de Physique U.S.T.H.B 1 Définition: La cinématique est une branche de la mécanique qui étudie les mouements des corps dans l espace en fonction du temps indépendamment des causes
Chafa Azzedine - Faculté de Physique U.S.T.H.B 1 Définition: La cinématique est une branche de la mécanique qui étudie les mouements des corps dans l espace en fonction du temps indépendamment des causes
Les connexions. Multifonctions. Avantage. Forme ronde et non carrée :
 Les connexions Multifonctions Avantage Forme ronde et non carrée : En plus d une esthétique agréable et assortie à la forme ronde des tubes et joints LeanTek, la forme arrondie des F-M Trilogiq permet
Les connexions Multifonctions Avantage Forme ronde et non carrée : En plus d une esthétique agréable et assortie à la forme ronde des tubes et joints LeanTek, la forme arrondie des F-M Trilogiq permet
INTRODUCTION. A- Modélisation et paramétrage : CHAPITRE I : MODÉLISATION. I. Paramétrage de la position d un solide : (S1) O O1 X
 O O1 X") INTRODUCTION La conception d'un mécanisme en vue de sa réalisation industrielle comporte plusieurs étapes. Avant d'aboutir à la maquette numérique du produit définitif, il est nécessaire d'effectuer une
INTRODUCTION La conception d'un mécanisme en vue de sa réalisation industrielle comporte plusieurs étapes. Avant d'aboutir à la maquette numérique du produit définitif, il est nécessaire d'effectuer une
Correction sujet machine à pain
 Correction sujet machine à pain 2 CHOIX DU MOTEUR ET DE SA TRANSMISSION DE PUISSANCE 2.1 ANALYSE FONCTIONNELLE PRELIMINAIRE Question N 1 : Mélangeage et pétrissage Composants de transmission par lesquels
Correction sujet machine à pain 2 CHOIX DU MOTEUR ET DE SA TRANSMISSION DE PUISSANCE 2.1 ANALYSE FONCTIONNELLE PRELIMINAIRE Question N 1 : Mélangeage et pétrissage Composants de transmission par lesquels
SUIVEUR SOLAIRE : Informations complémentaires
 SUIVEUR SOLAIRE : Informations complémentaires IMPORTANT : L objectif de la présente note technique n est pas de se substituer à l ouvrage «Alimentation électrique de sites isolés» mais de fournir des
SUIVEUR SOLAIRE : Informations complémentaires IMPORTANT : L objectif de la présente note technique n est pas de se substituer à l ouvrage «Alimentation électrique de sites isolés» mais de fournir des
Concours EPITA 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette BMW K1200S
 Concours EPIT 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette MW K1200S Durée : 2h. Calculatrices autorisées. Présentation du problème Le problème
Concours EPIT 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette MW K1200S Durée : 2h. Calculatrices autorisées. Présentation du problème Le problème
association adilca www.adilca.com LE COUPLE MOTEUR
 LE COUPLE MOTEUR Quelles sont les caractéristiques essentielles d un véhicule à moteur? Les services marketing le savent, c est la puissance et la vitesse maximale qui, au premier abord, focalisent l attention
LE COUPLE MOTEUR Quelles sont les caractéristiques essentielles d un véhicule à moteur? Les services marketing le savent, c est la puissance et la vitesse maximale qui, au premier abord, focalisent l attention
MANUEL D UTILISATION MODE D EMPLOI ALT 600 MODE D EMPLOI ALT 600 FABRICANT DE MATERIEL SCENIQUE
 1. Présentation. FABRICANT DE MATERIEL SCENIQUE MANUEL D UTILISATION La société ASD est spécialisée dans la conception et le développement de systèmes de levage spécifique à l environnement du spectacle
1. Présentation. FABRICANT DE MATERIEL SCENIQUE MANUEL D UTILISATION La société ASD est spécialisée dans la conception et le développement de systèmes de levage spécifique à l environnement du spectacle
T.P. 7 : Définir et contrôler un système d allumage statique
 T.P. 7 : Définir et contrôler un système d allumage statique Nom : Prénom : Classe : Date : Durée : 6 heures Zone de travail : Classe de cours et atelier Objectif du T.P. : - Être capable d identifier
T.P. 7 : Définir et contrôler un système d allumage statique Nom : Prénom : Classe : Date : Durée : 6 heures Zone de travail : Classe de cours et atelier Objectif du T.P. : - Être capable d identifier
EL-O-Matic série F Actionneurs pneumatiques à pignon et crémaillère
 Manuel d installation, d utilisation et d entretien DOC.IOM.EF.FR, Rév. 3 EL-O-Matic série F Actionneurs pneumatiques à pignon et crémaillère EL Matic TM EL-O-Matic F DOC.IOM.EF.FR Rév. 3 Sommaire Sommaire
Manuel d installation, d utilisation et d entretien DOC.IOM.EF.FR, Rév. 3 EL-O-Matic série F Actionneurs pneumatiques à pignon et crémaillère EL Matic TM EL-O-Matic F DOC.IOM.EF.FR Rév. 3 Sommaire Sommaire
Le triac en commutation : Commande des relais statiques : Princ ipe électronique
 LES RELAIS STATIQUES (SOLID STATE RELAY : SSR) Princ ipe électronique Les relais statiques sont des contacteurs qui se ferment électroniquement, par une simple commande en appliquant une tension continue
LES RELAIS STATIQUES (SOLID STATE RELAY : SSR) Princ ipe électronique Les relais statiques sont des contacteurs qui se ferment électroniquement, par une simple commande en appliquant une tension continue
Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive. Version 1.0
 Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive Sommaire - Le Robot M.I.M.I. (Multipode Intelligent à Mobilité Interactive) - Présentation du Système à Enseigner. - Composition
Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive Sommaire - Le Robot M.I.M.I. (Multipode Intelligent à Mobilité Interactive) - Présentation du Système à Enseigner. - Composition
STATIQUE GRAPHIQUE ET STATIQUE ANALYTIQUE
 ÉCOLE D'INGÉNIEURS DE FRIBOURG (E.I.F.) SECTION DE MÉCANIQUE G.R. Nicolet, revu en 2006 STATIQUE GRAPHIQUE ET STATIQUE ANALYTIQUE Eléments de calcul vectoriel Opérations avec les forces Equilibre du point
ÉCOLE D'INGÉNIEURS DE FRIBOURG (E.I.F.) SECTION DE MÉCANIQUE G.R. Nicolet, revu en 2006 STATIQUE GRAPHIQUE ET STATIQUE ANALYTIQUE Eléments de calcul vectoriel Opérations avec les forces Equilibre du point