INTRODUCTION À LA METHODE DES PLANS D'EXPÉRIENCES PAR LA MÉTHODE TAGUCHI
|
|
|
- Eloi Thibault
- il y a 9 ans
- Total affichages :
Transcription
1 C.N.E.D Génie Electrotechnique COMPLÉMENTS AU COURS D'ASSERVISSEMENT INTRODUCTION À LA METHODE DES PLANS D'EXPÉRIENCES PAR LA MÉTHODE TAGUCHI Phases de mise en relation entre modélisation et expérimentation : 1- Prédétermination comportementale du système 2- Simulation numérique sur calculateur 3- Plan d'expériences : Essais selon TAGUCHI 4- Confrontation entre : - le Modèle de comportement attendu et - le comportement Réel 5- Choix des paramètres de réglage pour optimisation des performances du système selon les critères choisis. Etude réalisée sur l'axe "Z" de levage d'un magasin automatique pour stockage déstockage de pièces. Jean-Claude CHAUVEAU Jean-Paul CHASSAING

2 LES PLANS D'EXPERIENCES (DESIGNS of EXPERIMENTS) La méthode du Docteur TAGUCHI La méthodologie Taguchi de mise en œuvre des plans d'expériences est l'un des outils de la qualité, au même titre que l'analyse des Modes de Défaillance et l'étude des Criticités (A.m.d.e.c) ou l'analyse de la Valeur. Comme tout outil, elle n'a d'intérêt que si l'on sait s'en servir, ce qui suppose à la fois de connaître la méthode et de pouvoir cerner les cas où elle apporte un "plus" par rapport aux techniques traditionnelles. I - INTRODUCTION La démarche d'assurance Qualité fait appel à la prévention et au progrès permanent dans les domaines de l'organisation de la qualité, de l'obtention des performances du produit et de la maîtrise des processus associés aux procédés industriels. Le plan d'expériences peut aider à la conception et à l'industrialisation du produit, ainsi qu'à la résolution de problèmes complexes d'optimisation (réglages) lors de la production du produit. Il s'intègre donc parfaitement dans la démarche qualité. Nous vous incitons vivement à mettre en œuvre le plan d'expériences dans les différentes étapes industrielles de conception et de validation du produit. Les résultats que vous attendez de ces étapes seront obtenus avec un maximum de rigueur et beaucoup plus rapidement qu'avec les méthodes traditionnelles, donc avec une efficience économique certaine. Il - PRÉSENTATION DE LA MÉTHODE A quoi sert un plan d'expériences? Vous êtes confrontés à un problème technique complexe : de multiples paramètres sont susceptibles d'influer sur la performance du système étudié. La performance que vous cherchez à améliorer est caractérisée par une ou plusieurs réponses. Quels sont les paramètres responsables des variations observées? Telle est la question.

3 Le plan d'expériences sert à mettre en évidence et à quantifier l'influence des paramètres pris en compte. Vous devez mettre en œuvre une série d'essais physiques ou une série de calculs numériques. C'est souvent le cas si vous vous trouvez dans un des contextes suivants : - études techniques ; - optimisation de processus ; - études de moyens de fabrication ; - amélioration de capabilité machine ; - essais de mise au point ; - essais d'endurance ; - essais de laboratoire ; - etc. Mais quelles expériences réaliser pour obtenir les informations recherchées? Un plan d'expériences est une suite d'essais organisée à l'avance de manière à déterminer en un minimum d'essais et avec un maximum de précision l'influence de multiples paramètres sur une ou plusieurs réponses. Conditions d'application Pour appliquer la méthode avec succès, il faut : - créer un groupe pluridisciplinaire constitué de personnes compétentes, concernées et motivées : ne pas oublier les expérimentateurs ; - associer un animateur formé à la méthode à un pilote, responsable technique du sujet traité ; - être en mesure d'expérimenter, de maîtriser les valeurs à donner aux paramètres et de mesurer avec précision la ou les réponses. La méthode devient lourde à utiliser lorsque les paramètres pris en compte sont trop nombreux (néanmoins il est rare que plus de 15 paramètres influencent grandement les réponses du système) ; - établir une stratégie expérimentale (série de plans) en fonction des objectifs fixés, des moyens disponibles et du délai accordé à l'étude ; - respecter scrupuleusement la démarche décrite ci-après. Démarche Les étapes sont les suivantes : 1. formaliser le problème, si possible au moyen d'un modèle graphique ; 2. sélectionner les paramètres, fixer leurs modalités (niveau de variations des paramètres) et sélectionner leurs interactions ;

4 3. construire le plan en fonction des tables de Taguchi ; 4. réaliser les essais ; 5. analyser les résultats ; 6. conclure après choix du réglage des paramètres qui peuvent être maitrisés et essai de confirmation. ÉTAPE 1 : FORMALISER LE PROBLEME Identifier le problème : est-ce un dysfonctionnement "produit" et/ou "processus", un taux de rebut important, une performance insuffisante, une mise au point à réaliser? Quantifier l'objectif à atteindre en définissant une ou plusieurs réponses. Les réponses étant définies, comment les mesurer? - Qui mesure? - Que mesure-t-on? - - Où le fait-on? - Quand le fait-on? - Comment le fait-on? Les différentes mesures peuvent être : - une grandeur quantitative (une longueur, un poids, une dureté, une force...) ; - un pourcentage (un taux de rebut...) ; - un classement ; - une cotation (un démérite...) - etc.. ÉTAPE 2 : SÉLECTIONNER LES PARAMÈTRES Fixer leurs modalités et sélectionner leurs interactions. Le groupe doit identifier les paramètres, qualitatifs ou quantitatifs, à priori responsables des variations des réponses. La manière de procéder est la suivante : - recenser tous les paramètres possibles (Remue-méninges, diagramme causes-effet (lshikawa), ADMEC,...) ; - sélectionner les paramètres à priori les plus influents pour l'étude, par élimination successive ; - choisir le nombre de modalités et leurs valeurs pour chacun des paramètres retenus ; - sélectionner les interactions à priori les plus influentes ; - déterminer les conditions d'essais : les paramètres listés mais non retenus seront

5 maintenus constants au cours des essais. La façon de réaliser les essais sera établie et figée. C'est l'expérience acquise par chacun des membres du groupe qui est utilisée lors de cette étape. A ce stade, il faut vérifier l'opportunité d'un plan d'expérience : - l'influence des paramètres est-elle vraiment méconnue, mal quantifié (problème de type "boîte noire")? - est-il possible de maîtriser les paramètres au cours des essais? Si non, les informations issues des étapes 1 et 2 permettent de s'orienter vers d'autres méthodes : méthode de résolution de problèmes, analyses de données... ÉTAPE 3 : CONSTRUIRE LE PLAN Un plan d'expériences évite de combiner toutes les modalités de tous les paramètres. Les plans les plus courants sont répertoriés dans un ensemble de tables disponibles en standard (Cf tables de Taguchi données en annexe 1). Le nombre de paramètres, de modalités par paramètres et le nombre d'interactions permettent de trouver le plan le mieux adapté au problème à résoudre. Les paramètres sont affectés aux colonnes en tenant compte des interactions et des paramètres difficiles à faire varier. ÉTAPE 4 : RÉALISER LES ESSAIS Il s'agit de reproduire sur le produit et/ou le processus chaque combinaison du plan d'expériences et pour chacune d'entre elles de consigner la ou les réponses dans un tableau. Un soin particulier doit être apporté à la réalisation de ces essais (grande rigueur, respect de la gamme d'essais, relevé des conditions expérimentales.) Il faut réaliser tous les essais prévus. Il est impossible de s'arrêter sous peine de perdre le bénéfice de l'étude. ÉTAPE 5 : ANALYSER LES RÉSULTATS Il existe deux analyses complémentaires. L'analyse graphique : Elle donne une représentation simple des résultats. Elle permet de visualiser l'influence des paramètres et de leurs interactions ( c f. annexe n 1 ).

6 L'analyse statistique : L'analyse de la variance vise à distinguer, dans les variations globales de la réponse, la part due à l'influence réelle des paramètres de la part due au hasard. Cette analyse : - complète l'analyse graphique ; - donne un taux de confiance statistique aux résultats ; - chiffre la contribution de chaque paramètre à la variation globale de la réponse ; - quantifie la part du résidu, c'est-à-dire ce qui a varié à l'insu de l'expérimentateur. ÉTAPE 6 : CONCLURE L'objectif de cette dernière étape est de faire la synthèse des résultats obtenus et de décider des actions à entreprendre (réglages des paramètres ou reconception). L'essai de confirmation doit permettre la décision à entreprendre soit : ---> accepter le niveau de qualité optenu après réglage, ---> mettre en oeuvre un nouveau plan pour améliorer le résultat, ---> changer de stratégie d'analyse où de conception du procédé. Le plan d'expériences est un réflexe à acquérir. Dans la démarche habituelle, l'expérimentateur progresse pas à pas et s'arrête sur la première solution satisfaisante. A l'opposé, un plan d'expériences permet de mieux comprendre les phénomènes : - l'influence des paramètres est quantifiée ; - - les paramètres sont hiérarchisés ; - leur sens de variation est connu ; - les interactions sont mises en évidence ; - - les réponses sont modélisées. Ces connaissances permettent d'optimiser le système étudié et d'enrichir la base de données. Ultérieurement, les informations recueillies pourront orienter d'autres études. Toutes ces raisons contribuent au développement des plans d'expériences dans le monde industriel.
.")
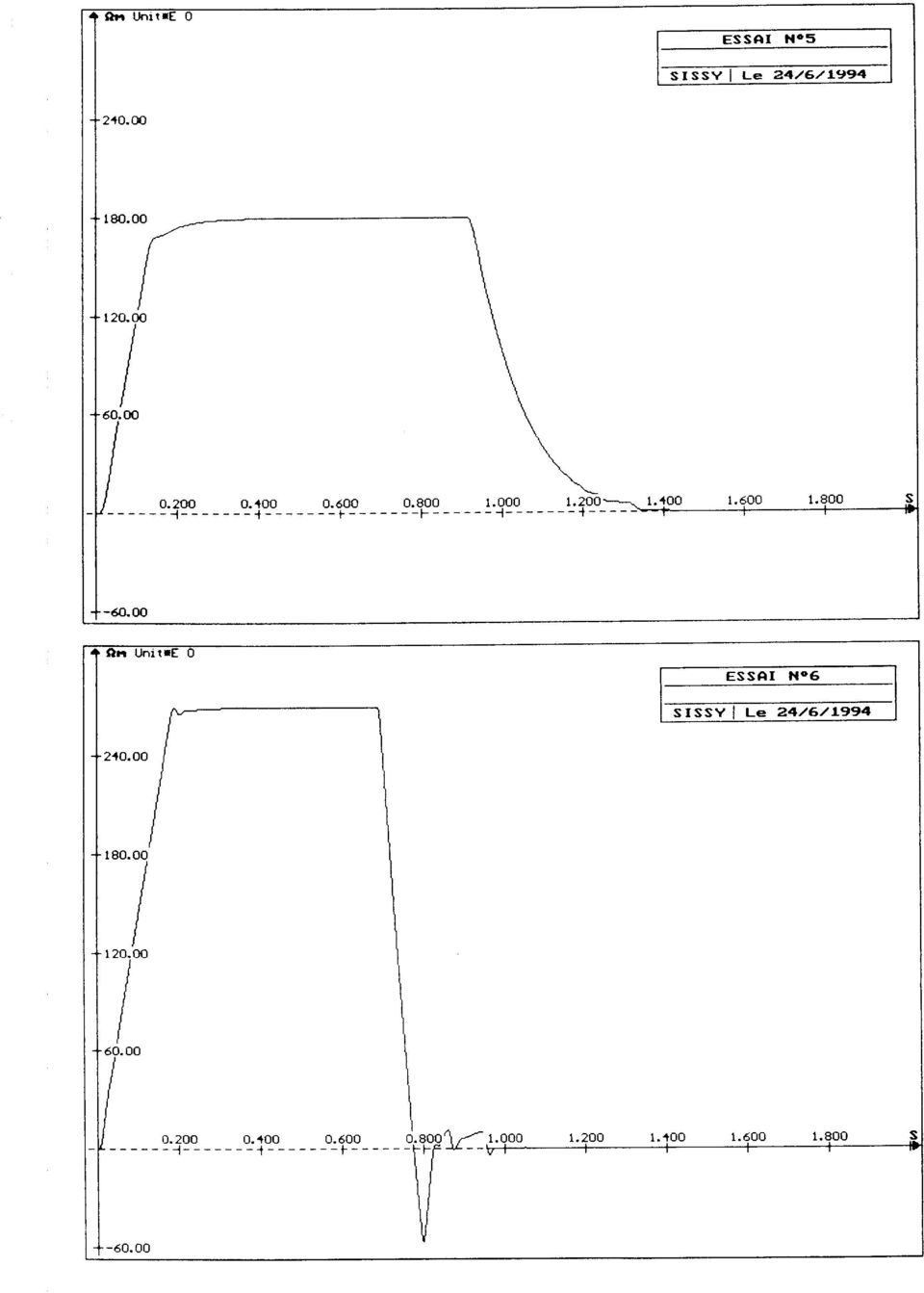
7 III - EXEMPLE D'APPLICATION EN GÉNIE ÉLECTRIQUE Campagne d'essais pour un réglage optimal de l'axe Z d'un système de magasin automatisé : Transgerbeur Problème posé : Il s'agit de réaliser les essais qui mettront en évidence l'influence des paramètres (de configuration et de réglage) sur le comportement du sous-système de levage (axe Z). Les paramètres sont accessibles au régleur par mots implantés en mémoire dans l'automate programmable et par réglage du variateur de vitesse dédié au moteur électrique de l'axe Z. Les paramètres accessibles par programme concernent : ---> l'accélération souhaitée durant la phase de mise en vitesse variable Acc ---> la vitesse nominale souhaitée en atteinte de palier vitesse variable Vp > la distance à partir de laquelle on commence le ralentissement variable K4 Les paramètres accessibles par réglage du variateur concernent : ---> le courant maximum admissible par le moteur variable I max ---> le gain proportionnel et intégral (P.l) variable gain Le but recherché est d'obtenir le déplacement le plus rapide possible pour aller d'un point à un autre en respectant le profil de vitesse donné par la loi de commande. Dans cette perspective la campagne de huit essais (table de Taguchi L 8) doit permettre de déterminer le meilleur compromis de réglage. On décide de faire varier chaque facteur entre deux niveaux (N1 et N2) dans l'ordre indiqué par le plan d'expériences et on observe les réponses en regard de ces réglages pour chacun des essais. Les réponses sont caractérisées par les observations et mesures suivantes: ---> l'erreur de traînage notée Et ---> le dépassement de vitesse nominale notée Ed ---> l'oscillation maximale au voisinage de l'arrêt Ee ---> le temps total mis pour passer d'une position à une autre T Le meilleur réglage vise à minimiser Et, Ed et Ee pour un temps minimum de déplacement du mobile en levage. Les comportements sont quantifiés sur les oscillogrammes enregistrés à la table traçante à partir des mesures de Et, Ed, Ee et T (voir figure page suivante).

8 Identification des variables de réglage et du comportement de l'axe "Z" en montée (réponses possibles pour T, Et, Ed et Ee). VITESSE du mobile en montée Trainage Dépassement de Erreur statique Inversion de Et vitesse maxi. : Ee 1 vitesse : Ee O tt) Cri durée de l'accélération jusqu'à la vitesse palier Vp temps mis pour parcourir la distance K4 Temps de déplacement pour passer d'une position à l'autre : T VITESSE du mobile en descente Nota : Le réglage du procédé est à réaliser en montée pour la charge nominale de 10 Kilogrammes. Pour optimiser le fonctionnement et obtenir un temps de cycle minimal, tout en respectant la loi de commande, les paramètres choisis, après réglage en montée, seront testés en descente. Si les valeurs choisies en montée ne conviennent pas il sera nécessaire de faire une nouvelle campagne d'essais en descente. Voir les relevés effectués et les décisions de réglage sur documents en annexe n 2. Voir également la transposition de la méthode de réglage à un sous-système de conditionnement de flacons pour machine industrielle.

9 MÉTHODOLOGIE DE LA RECHERCHE EXPÉRIMENTALE Formuler clairement le problème étudié Fixer les objectifs Faire la synthèse des connaissances Lister les facteurs susceptibles d'avoir de l'influence, les réponses et les contraintes ; définir le domaine expérimental d'intérêt Etablir une stratégie expérimentale ou plan d'expérimentation Effectuer les expériences En déduire les réponses aux questions posées En conclusion, et bien que ce soit difficile à admettre : «il n'y a aucune information dans le résultat d'une expérience et toute l'information est contenue dans les conditions expérimentales» (matrice d'information de Fisher) «la qualité de l'information ne dépend pas du nombre d'expériences».
 «la qualité de l'information ne dépend pas du nombre")
10 1. Présentation du système Le système comporte 4 parties: AXE Z Modélisation et optimisation des performances mécanique : réducteur et entraînement par courroie crantée électrique : moteur à courant continu à aimants permanents «: variateur 4 Q «: calculateur ( automate ) 2. Modélisation 2.1 Motorisation Moteur à courant continu: Un = 55V, In = 7A, Nn = 3000 tr/min, K t = Ke = 0,146 L = 5,5 mh, R = 0,56 Ω, Jt = 0,5 mkg.m² Réducteur : 1/20, poulie = 0,070 m Couple de frottement sec : 0,1 Nm, Coefficient de frottement visqueux : 0,0005 Nm/rd/s Génératrice tachymétrique : 60 mv/tr/min Codeur incrémental de position : résolution 1mm Schéma de simulation de la motorisation Le bloc Im simule la limite de courant ( fonction seuil G = 200, seuil = ± Im )

11 2.1.3 Première approche Il s agit de régler le correcteur PI de la boucle de vitesse par une méthode classique : relevé du diagramme de Bode de la motorisation en boucle ouverte mesure de la pulsation et du gain correspondant à la marge de phase de 45 placement du PI à une décade de la pulsation critique Tracé du diagramme de Bode de la motorisation en boucle ouverte sur ce diagramme on relève : gain = -30,6 db et ω = 175 rd/s, on peut donc régler le gain du PI à 30dB ( A 30 ) et τ = 10 / ω = 5 ms. C(p) = 30 0,005p 1 + 0,005p ** remarque Pour tracer le diagramme de Bode, penser à ôter les non-linéarités
 et τ = 10 / ω = 5 ms.")
12 2.2 Le variateur et le générateur de rampe Le variateur est un hacheur 4 Q alimenté sous 60 V. La fréquence de découpage étant grande devant la fréquence de coupure du système, on l assimilera à un gain pur La consigne indicielle est transformée en rampe pour régler l accélération et celle-ci est limitée en tension pour obtenir la vitesse désirée Schéma du générateur de rampe : 2.3 Le calculateur (automate programmable) Obtention de la loi de vitesse d approche. A partir d un point x1 distant de Δx de l arrivée x0, la vitesse décroît linéairement de V max à la vitesse nulle. x 0 x x v = V max = V 0 x max x 0 x1 Δ x Schéma du calcul de v
 2.3.1 Obtention de la loi de vitesse d approche.")
13 En sortie du premier sommateur nous avons : s 1 = x + Δx - x 0. Si cette somme est 0 la fonction seuil est passante d où s 2 = x 0 x + Δ Δ x x et v = V max x 0 x + Δ Δ x x - 1 = x 0 x Δ x.v max 2.4 Passage vitesse / position et codeur Schéma de simulation La fonction Rayon / p inclut le réducteur d un 20 ème et le passage vitesse / position 0,00175 p x(p) = Ω( p) La fonction Co représentant le codeur est une fonction discrétiseur de pas 1mm 2.5 Schéma de simulation de l ensemble

14 3. Optimisation 3.1 Influence des paramètres 5 paramètres sont accessibles: Imax courant maximal valeur des seuils de la fonction Im Vmax vitesse maximale valeur de l entrée CV Acc accélération valeur de la constante de temps de INT G gain du PI vitesse valeur du gain de C(p) Δx Ecart x o - x 1 valeur de l entrée Dx Influence du courant maximal Influence del accélération 1: 3000 rd/s ² 2: 1500 rd/s ² 3: 1000 rd/s ² 4: 750 rd/s² Influence de l écart Δx Influence de la vitesse maximale 1: 270 rd/s 2: 240 rd/s 3: 210 rd/s 4: 180 rd/s

15 3.1.5 Influence du gain du correcteur P.I Réglage moyen 8A 1500 rd/s 240 rd/s 3cm G=30 X = 50 cm 3.2 Optimisation par la méthode du plan d expérience ( Méthode de Taguchi ). facteur. Nous choisirons la matrice orthogonale L8 (2 7 ) en donnant 2 valeurs possibles à chaque N A B A-B C A-C C-B D Tableau des essais N I Acc V Dx G D% X% t , , , , , ,5 0 1, , , , , , , , ,5 0 1, , ,90 MOY 4,375 6,75 1,143 L interaction 1-2 (colonne 3) pourra éventuellement être analysée.

16

17

18
19

20 Analyses des résultats 1,3 0, ,02 0, L observation des résultats nous montre que : si on s attache au temps de parcours, la meilleure combinaison est obtenue pour le choix Imax = 6 A, Acc = 3000 rd/s ², Vmax = 270 rd/s, Dx = 0,020 m et le gain G n a pas d influence. Le paramètre le plus significatif est la vitesse maximale. si on s attache à la valeur du dépassement, le seul paramètre influent est l accélération. Pour le positionnement final le choix se porte sur Vmax =180 rd/s et Dx = 0,04 m. Si on veut garder un temps correct avec peu de dépassement et un positionnement rapide le compromis s effectuera sur Vmax et Dx, les autres paramètres étant moins déterminants. Choix réalisé Imax = 7 A, Acc = 1500 rd/s ², Vmax = 240 rd/s, Dx = 0,030 m, G =40 Ces valeurs étant choisies, un essai de confirmation est réalisé. Les valeurs obtenues sont les suivantes : N Imax Acc Vmax Dx G temps D% X% final , , On remarquera que les résultats obtenus sont meilleurs que les moyennes des 8 essais.

21 Conclusion Cette méthode permet, en peu d essais, de parvenir à un résultat très performant. La méthode classique qui consiste à ne faire varier qu un paramètre à la fois aurait nécessité 2 5 = 32 essais. De plus les interactions entre paramètres peuvent être mises en évidence. Par exemple, on retrouve l interaction du courant maximal et de l accélération en étudiant la ligne 3 du tableau L8.
22 ANNEXE N 1 MÉTHODE TAGUCHI
23 Pierre SOUVA Y METHODE TAGUCHI Exemple d'application ( on recherche une valeur minimale pour la réponse). 1 Niveau des facteurs selectionnés (A,B, C, E) Les quatre facteurs sélectionnés seront testés aux niveaux de la figure 1 FACTEURS NIVEAUX A B C E fig 1 NIVEAU NIVEAU Tableau des combinaisons retenues des interactions effectuées et des réponses obtenues On a utilisé une table L8 ( 2 7 ) - Le facteur C est placé en colonne 1 - Le facteur B est placé en colonne 2 - Le facteur A est placé en colonne 4 - Le facteur E est placé en colonne 7 - la colonne 3 est réservée à l'interaction CB - la colonne 4 est réservée à l'interaction CA facteurs C B CB A CA E Réponses fig E3 8 R = 8, Table des réponses Les résultats sont obtenus à partir des moyennes des réponses pour chaque niveau des facteurs facteurs C B A E CB CA fig 3 niveau niveau écarts
24 4 - Graphes des effets des facteurs et des interactions L'observation du graphe des réponses montre que les facteurs C et A ont une influence significative sur la réponse. Cl et A2 fournissent les meillers résultats. Les facteurs B et E semblent n'avoir aucune influence significative. Pour les interactions, nous retiendrons celle de C avec B pour laquelle nous allons déterminer la meilleure combinaison. table des réponses de l'interaction CB B C Niv , fig 5 Graphe des réponses de l'interaction CB fig 6 La combinaison C1 B1 fournit une réponse favorable, c'est pourquoi nous retiendrons ausi le facteur B à son niveau Choix final Le choix final se poile sur la combinaison des facteurs suivante qui minimise la fonction: A2 = 90 B1 = 3 C1 = 10 E sera fixé en fonction de critères économiques (c'est un facteur de coùt) 6 - Réponse moyenne attendue et à vérifier par un essai complémentaire ou en exploitation Réponse moyenne des 8 essais réalisés = 69 / 8 = 8,625 Chaque optimisation d'un facteur apporte une réduction de la réponse qui est fonction de l'influence de ce facteur. Dans notre cas, on peut écrire: Y = R + ( C1 R ) + ( A2 R ) + ( C1B1 R ) ( C1 R ) ( B1 R ) Y = 8,625 + (5,25-8,625) + (6,25-8,625) + (3,5-8,625) - (5,25-8,625) - (8,75-8,625) = 1,125
25
26 BIBLIOGRAPHIE EN FRANCAIS. PILLET Maurice Introduction aux plans d'expériences par la méthode Taguchi Les Editions d'organisation, SERGENT Michelle, MATHIEU Didier et PHAN-TAN-LUU Roger Méthodologie de la Recherche Expérimentale LPRAI Marseille, VIGIER Michel G. Pratique des Plans d'expériences. Méthodologie Taguchi. Les Editions d'organisation, Gestion de la qualité. Méthodologie Taguchi Revue de Statistique Appliquée, 1989, Vol XXXVII N 2 CERESTA, 10 rue Bertin Poirée, Paris. Sauvay Pierre Les plans d expérience Méthode Taguchi AFNOR. Articles parus dans l automaticien N 13 Avril 1993 N 14 Mai 1993 N 15 Juin 1993 N 16 Juillet Amélioration du comportement d un procédé - Recherche d une solution particulière - Recherche de la stabilité - Recherche d une solution robuste Par J. Philipin P. Sauvay T. Mons. IUFM de Toulouse Réseau National de Ressources en Electrotechnique (sur demande) IUFM, complexe scientifique de Rangueil 118 route de Narbonne Toulouse cedex 04 Tel ou
27 ANNEXE N 2 EXEMPLE D APPLICATION EN GÉNIE ELECTRIQUE ESSAIS ET RÉSULTATS
28 Essais pour le réglage du comportement de l'axe Z en levage Constantes : masse embarquée Sens Variables de réglage : courant max moteur accélération vitesse palier distance de ralentissement gain proportionnel et intégral 10 Kg montée I max Acc V max K4 Gain
29 LANS D EXPERIENCES - DESIGNS OF EXPEIENCES AXE Z en montée Table des réponses Essai A B B A-B A-B C C A-C A-C C-B C-B D D Imax Acc. Vmax K4 Gain N N N N N N N N 8 j Etude du t aina e Et Imax Acc. O Vmax K4 Gain 0 N1 N2 1, , ,025 0,4 0,625 0,4 0,625 0,625 0,4 0,625 0,4 Etude du dé p assement de vitesse palier Ed Imax Acc. 0 Vmax K4 Gain 0 N1 N2 0,0625 0,005 0,0175 0,05 0,0125 0,055 0,05 0,0125 0,055 0, ,0675 0, Etude de la mise en position Ee Imax Acc. 0 Vmax K4 Gain 0.. N1 0,15 0,45 0,325 0,15 0,775 0,325 0,45 N2 0,625 0,325 0,45 0, ,45 0,45 Etude du tem p s de transit entre la position 1 et la position 2 T Imax Acc. 0 Vmax K4 Gain 0 Ni N2 2,305 2,43 2,405 2,33 2,32 2,415 2,7175 2,0175 2,3575 2,3775 2,337 2,397 2,392 2,342 Interaction AB ( Imax et Acc) Et A1 A2 Ed Al A2 Ee Al A2 T Al A2 B1 O 0 B1 0,025 0,01 B1 0,15 0,75 B1 2,295 2,5 B2 2,05 0 B2 0,1 0 B2 0,15 0,5 B2 2,315 2,3 Interaction AC Et A1 A2 Ed Al A2 Ee Al A2 T Al A2 C1 0,8 0 C1 0,1 0 C1 0,3 0 C1 2,645 2,7 C2 1,25 0 C2 0,025 0,01 C2 0 1,2 C2 1,965 2,0 Et Ed Ee ,3 2,63 0 0,05 0 1,96 1,6 0,2 0,3 2,66 2, , ,82 0 0,02 1,5 2, , ,93 0,5125 0, ,367 GRAPHE L8 de TAGUCHI A AFFECTATION DES VARIABLES A ---> Imax B ---> Acc. C ---> 0 AC ---> K4 BC ---> Gain D ---> 0
30
31
32
33
34
35
36
37
38
39
40 Paramètre de réglage: Reglage du mouvement de descente de l'axe Z L'intensité Imax délivrée au moteur ainsi que le gain de la chaîne de régulation ayant été réglés pour le mouvement de montée seront maintenus constants pour le réglage du mouvement de descente. Les autres paramètres pouvant influer sur le comportement en descente sont donc : - L'accélération K2, la vitesse nominale en descente Vnd et la distance de ralentissement en descente K5 Grandeurs observées: Et : Ecart de traînage maximum dans la phase d'accélération Ed : Ecart de dépassement maximum Ee :Ecart de dépassement au moment de l'arrêt en position T : Temps du mouvement de descente Niveau des paramètres: Accélération K2: Niveu 1 : 140; niveau 2 : 200 Vitesse nominale en descente: niveau 1 : -600; niveau 2 : -900 Distance de ralentissement K5 : niveau 1 : 12; niveau 2 : 24 Table L4 du Plan d'expérience: Essai Paramètres de réglage Accél. K2 Vnd Raient. K5 Observations Et Ed Ee T , Dépouillement des résultats Pas d'influence sur la réponse Et Ed Ee 7- Acc K2 N Vnd Rai K5 Acc K2 Vnd Ral K5 N Acc K2 V Vnd N Ral K5, 2.39 N N N
41 Analyse des résultats: N1 N2 N1 N2 N1 N2 Accél: K2 Vnd Distance de ral.: K5 Décision: Accélération : Niveau 1 soit 140 Vitesse nominale en descente: Vnd : -850 Distance de ralentissement: K5 : Niveau 2 soit 24 Rappel de la décision pour la montée: lmax : 7.25 A Accélération : Niveau 1 : 70 Vitesse nominale en montée : Vnm 850 Distance de ralentissement en montée: Niveau 2 : 24 Gain de la chaîne de régulation : 10 Voir résultat final sur la courbe de ré p onse en montée et en descente de l'essai de confirmation.
42
43
44
45
46
Optimiser les performances du mouvement de monte de l Axe Z.
 Page/0 - BUT DE LA MANIPULATION : Optimiser les performances du mouvement de monte de l Axe Z. - LES PLANS D EXPERIENCE -LA METHODE DU DOCTEUR TAGUCHI. La mthodologie Taguchi de mise en oeuvre des plans
Page/0 - BUT DE LA MANIPULATION : Optimiser les performances du mouvement de monte de l Axe Z. - LES PLANS D EXPERIENCE -LA METHODE DU DOCTEUR TAGUCHI. La mthodologie Taguchi de mise en oeuvre des plans
Notions d asservissements et de Régulations
 I. Introduction I. Notions d asservissements et de Régulations Le professeur de Génie Electrique doit faire passer des notions de régulation à travers ses enseignements. Les notions principales qu'il a
I. Introduction I. Notions d asservissements et de Régulations Le professeur de Génie Electrique doit faire passer des notions de régulation à travers ses enseignements. Les notions principales qu'il a
Automatique Linéaire 1 Travaux Dirigés 1A ISMIN
 Automatique Linéaire 1 Travaux Dirigés Travaux dirigés, Automatique linéaire 1 J.M. Dutertre 2014 TD 1 Introduction, modélisation, outils. Exercice 1.1 : Calcul de la réponse d un 2 nd ordre à une rampe
Automatique Linéaire 1 Travaux Dirigés Travaux dirigés, Automatique linéaire 1 J.M. Dutertre 2014 TD 1 Introduction, modélisation, outils. Exercice 1.1 : Calcul de la réponse d un 2 nd ordre à une rampe
MOTO ELECTRIQUE. CPGE / Sciences Industrielles pour l Ingénieur TD06_08 Moto électrique DIAGRAMME DES INTER-ACTEURS UTILISATEUR ENVIRONNEMENT HUMAIN
 MOTO ELECTRIQUE MISE EN SITUATION La moto électrique STRADA EVO 1 est fabriquée par une société SUISSE, située à LUGANO. Moyen de transport alternatif, peut-être la solution pour concilier contraintes
MOTO ELECTRIQUE MISE EN SITUATION La moto électrique STRADA EVO 1 est fabriquée par une société SUISSE, située à LUGANO. Moyen de transport alternatif, peut-être la solution pour concilier contraintes
CABLECAM de HYMATOM. Figure 1 : Schéma du système câblecam et détail du moufle vu de dessus.
 CABLECAM de HYMATOM La société Hymatom conçoit et fabrique des systèmes de vidéosurveillance. Le système câblecam (figure 1) est composé d un chariot mobile sur quatre roues posé sur deux câbles porteurs
CABLECAM de HYMATOM La société Hymatom conçoit et fabrique des systèmes de vidéosurveillance. Le système câblecam (figure 1) est composé d un chariot mobile sur quatre roues posé sur deux câbles porteurs
Analyse des Systèmes Asservis
 Analyse des Systèmes Asservis Après quelques rappels, nous verrons comment évaluer deux des caractéristiques principales d'un système asservi : Stabilité et Précision. Si ces caractéristiques ne sont pas
Analyse des Systèmes Asservis Après quelques rappels, nous verrons comment évaluer deux des caractéristiques principales d'un système asservi : Stabilité et Précision. Si ces caractéristiques ne sont pas
Equipement d un forage d eau potable
 Equipement d un d eau potable Mise en situation La Société des Sources de Soultzmatt est une Société d Economie Mixte (SEM) dont l activité est l extraction et l embouteillage d eau de source en vue de
Equipement d un d eau potable Mise en situation La Société des Sources de Soultzmatt est une Société d Economie Mixte (SEM) dont l activité est l extraction et l embouteillage d eau de source en vue de
CAPTEURS - CHAINES DE MESURES
 CAPTEURS - CHAINES DE MESURES Pierre BONNET Pierre Bonnet Master GSI - Capteurs Chaînes de Mesures 1 Plan du Cours Propriétés générales des capteurs Notion de mesure Notion de capteur: principes, classes,
CAPTEURS - CHAINES DE MESURES Pierre BONNET Pierre Bonnet Master GSI - Capteurs Chaînes de Mesures 1 Plan du Cours Propriétés générales des capteurs Notion de mesure Notion de capteur: principes, classes,
SYSTEMES LINEAIRES DU PREMIER ORDRE
 SYSTEMES LINEIRES DU PREMIER ORDRE 1. DEFINITION e(t) SYSTEME s(t) Un système est dit linéaire invariant du premier ordre si la réponse s(t) est liée à l excitation e(t) par une équation différentielle
SYSTEMES LINEIRES DU PREMIER ORDRE 1. DEFINITION e(t) SYSTEME s(t) Un système est dit linéaire invariant du premier ordre si la réponse s(t) est liée à l excitation e(t) par une équation différentielle
Evaluation de la variabilité d'un système de mesure
 Evaluation de la variabilité d'un système de mesure Exemple 1: Diamètres des injecteurs de carburant Problème Un fabricant d'injecteurs de carburant installe un nouveau système de mesure numérique. Les
Evaluation de la variabilité d'un système de mesure Exemple 1: Diamètres des injecteurs de carburant Problème Un fabricant d'injecteurs de carburant installe un nouveau système de mesure numérique. Les
SCIENCES INDUSTRIELLES (S.I.)
") SESSION 2014 PSISI07 EPREUVE SPECIFIQUE - FILIERE PSI " SCIENCES INDUSTRIELLES (S.I.) Durée : 4 heures " N.B. : Le candidat attachera la plus grande importance à la clarté, à la précision et à la concision
SESSION 2014 PSISI07 EPREUVE SPECIFIQUE - FILIERE PSI " SCIENCES INDUSTRIELLES (S.I.) Durée : 4 heures " N.B. : Le candidat attachera la plus grande importance à la clarté, à la précision et à la concision
- Le Diagramme de Gantt. - Le Diagramme de Pert - La Méthode QQCQCCP - La Méthode MOSI - Cahier des charges fonctionnel
 Planifier le projet > Identifier les étapes > Organiser le projet > Identifier les étapes - Le Diagramme de Gantt > Organiser le projet - Le Diagramme de Pert - La Méthode QQCQCCP - La Méthode MOSI - Cahier
Planifier le projet > Identifier les étapes > Organiser le projet > Identifier les étapes - Le Diagramme de Gantt > Organiser le projet - Le Diagramme de Pert - La Méthode QQCQCCP - La Méthode MOSI - Cahier
Premier ordre Expression de la fonction de transfert : H(p) = K
 = K") Premier ordre Expression de la fonction de transfert : H(p) = K + τ.p. K.e τ K.e /τ τ 86% 95% 63% 5% τ τ 3τ 4τ 5τ Temps Caractéristiques remarquables de la réponse à un échelon e(t) = e.u(t). La valeur
Premier ordre Expression de la fonction de transfert : H(p) = K + τ.p. K.e τ K.e /τ τ 86% 95% 63% 5% τ τ 3τ 4τ 5τ Temps Caractéristiques remarquables de la réponse à un échelon e(t) = e.u(t). La valeur
Automatique (AU3): Précision. Département GEII, IUT de Brest contact: [email protected]
: Précision. Département GEII, IUT de Brest contact: vincent.choqueuse@univ-brest.fr") Automatique (AU3): Précision des systèmes bouclés Département GEII, IUT de Brest contact: [email protected] Plan de la présentation Introduction 2 Écart statique Définition Expression Entrée
Automatique (AU3): Précision des systèmes bouclés Département GEII, IUT de Brest contact: [email protected] Plan de la présentation Introduction 2 Écart statique Définition Expression Entrée
TSTI 2D CH X : Exemples de lois à densité 1
 TSTI 2D CH X : Exemples de lois à densité I Loi uniforme sur ab ; ) Introduction Dans cette activité, on s intéresse à la modélisation du tirage au hasard d un nombre réel de l intervalle [0 ;], chacun
TSTI 2D CH X : Exemples de lois à densité I Loi uniforme sur ab ; ) Introduction Dans cette activité, on s intéresse à la modélisation du tirage au hasard d un nombre réel de l intervalle [0 ;], chacun
uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»
![uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»](/thumbs/18/800414.jpg "uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»") TopChair S c Première partie Présentation du système Plus d autonomie pour plus de liberté! TopChair S c offre aux personnes à mobilité réduite une nouvelle possibilité de se déplacer sans assistance à
TopChair S c Première partie Présentation du système Plus d autonomie pour plus de liberté! TopChair S c offre aux personnes à mobilité réduite une nouvelle possibilité de se déplacer sans assistance à
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE
 BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR ÉPREUVE DU VENDREDI 20 JUIN 2014 Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR ÉPREUVE DU VENDREDI 20 JUIN 2014 Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un
PROBLEMES D'ORDONNANCEMENT AVEC RESSOURCES
 Leçon 11 PROBLEMES D'ORDONNANCEMENT AVEC RESSOURCES Dans cette leçon, nous retrouvons le problème d ordonnancement déjà vu mais en ajoutant la prise en compte de contraintes portant sur les ressources.
Leçon 11 PROBLEMES D'ORDONNANCEMENT AVEC RESSOURCES Dans cette leçon, nous retrouvons le problème d ordonnancement déjà vu mais en ajoutant la prise en compte de contraintes portant sur les ressources.
Items étudiés dans le CHAPITRE N5. 7 et 9 p 129 D14 Déterminer par le calcul l'antécédent d'un nombre par une fonction linéaire
 CHAPITRE N5 FONCTIONS LINEAIRES NOTION DE FONCTION FONCTIONS LINEAIRES NOTION DE FONCTION FONCTIONS LINEAIRES NOTION DE FONCTION Code item D0 D2 N30[S] Items étudiés dans le CHAPITRE N5 Déterminer l'image
CHAPITRE N5 FONCTIONS LINEAIRES NOTION DE FONCTION FONCTIONS LINEAIRES NOTION DE FONCTION FONCTIONS LINEAIRES NOTION DE FONCTION Code item D0 D2 N30[S] Items étudiés dans le CHAPITRE N5 Déterminer l'image
Problèmes sur le chapitre 5
 Problèmes sur le chapitre 5 (Version du 13 janvier 2015 (10h38)) 501 Le calcul des réactions d appui dans les problèmes schématisés ci-dessous est-il possible par les équations de la statique Si oui, écrire
Problèmes sur le chapitre 5 (Version du 13 janvier 2015 (10h38)) 501 Le calcul des réactions d appui dans les problèmes schématisés ci-dessous est-il possible par les équations de la statique Si oui, écrire
WEBINAIRE SUR LE SUIVI DE TENDANCES
 WEBINAIRE SUR LE SUIVI DE TENDANCES Le 16/02/2012 à 21H Présenté par Gilles SANTACREU (Boursikoter.com) En partenariat avec CMC Markets 1 Gilles SANTACREU, 43 ans - Webmaster et fondateur du site Boursikoter.com
WEBINAIRE SUR LE SUIVI DE TENDANCES Le 16/02/2012 à 21H Présenté par Gilles SANTACREU (Boursikoter.com) En partenariat avec CMC Markets 1 Gilles SANTACREU, 43 ans - Webmaster et fondateur du site Boursikoter.com
Test : principe fondamental de la dynamique et aspect énergétique
 Durée : 45 minutes Objectifs Test : principe fondamental de la dynamique et aspect énergétique Projection de forces. Calcul de durée d'accélération / décélération ou d'accélération / décélération ou de
Durée : 45 minutes Objectifs Test : principe fondamental de la dynamique et aspect énergétique Projection de forces. Calcul de durée d'accélération / décélération ou d'accélération / décélération ou de
Mesures et incertitudes
 En physique et en chimie, toute grandeur, mesurée ou calculée, est entachée d erreur, ce qui ne l empêche pas d être exploitée pour prendre des décisions. Aujourd hui, la notion d erreur a son vocabulaire
En physique et en chimie, toute grandeur, mesurée ou calculée, est entachée d erreur, ce qui ne l empêche pas d être exploitée pour prendre des décisions. Aujourd hui, la notion d erreur a son vocabulaire
Donner les limites de validité de la relation obtenue.
 olutions! ours! - Multiplicateur 0 e s alculer en fonction de. Donner les limites de validité de la relation obtenue. Quelle est la valeur supérieure de? Quel est le rôle de 0? - Multiplicateur e 0 s alculer
olutions! ours! - Multiplicateur 0 e s alculer en fonction de. Donner les limites de validité de la relation obtenue. Quelle est la valeur supérieure de? Quel est le rôle de 0? - Multiplicateur e 0 s alculer
MBR225. Le module a été conçu et réalisé conformément aux normes en vigueur portant sur la sûreté et la fiabilité des installations industrielles.
 MBR225 Module de surveillance des chaînes cinématiques Le module est dédié à la surveillance du fonctionnement de machines dont la chaîne cinématique constitue un facteur important de sécurité : treuil,
MBR225 Module de surveillance des chaînes cinématiques Le module est dédié à la surveillance du fonctionnement de machines dont la chaîne cinématique constitue un facteur important de sécurité : treuil,
Introduction. I Étude rapide du réseau - Apprentissage. II Application à la reconnaissance des notes.
 Introduction L'objectif de mon TIPE est la reconnaissance de sons ou de notes de musique à l'aide d'un réseau de neurones. Ce réseau doit être capable d'apprendre à distinguer les exemples présentés puis
Introduction L'objectif de mon TIPE est la reconnaissance de sons ou de notes de musique à l'aide d'un réseau de neurones. Ce réseau doit être capable d'apprendre à distinguer les exemples présentés puis
COMMENT MAITRISER LA GESTION DES APPROVISIONNEMENTS ET DES STOCKS DE MEDICAMENTS
 1 sur 9 COMMENT MAITRISER LA GESTION DES APPROVISIONNEMENTS ET DES STOCKS DE MEDICAMENTS (L'article intégral est paru dans Gestions Hospitalières n 357 de juin-juillet 1996) Pour plus d'informations concernant
1 sur 9 COMMENT MAITRISER LA GESTION DES APPROVISIONNEMENTS ET DES STOCKS DE MEDICAMENTS (L'article intégral est paru dans Gestions Hospitalières n 357 de juin-juillet 1996) Pour plus d'informations concernant
Notice d utilisation de la : Pro-Ject Debut & Debut Phono SB
 Notice d utilisation de la : Pro-Ject Debut & Debut Phono SB 11 14 11 22 2 1 3 16 17 6 15 1 4 5 8 7 9 20 21 17 9a 3a 25 33 45/78 SPEED 24 10 11 13 12 2 PRO-JECT DEBUT/DEBUT PHONO SB Descriptif du produit
Notice d utilisation de la : Pro-Ject Debut & Debut Phono SB 11 14 11 22 2 1 3 16 17 6 15 1 4 5 8 7 9 20 21 17 9a 3a 25 33 45/78 SPEED 24 10 11 13 12 2 PRO-JECT DEBUT/DEBUT PHONO SB Descriptif du produit
OTIS. Mod. La modernisation réinventée. Plus de sécurité Plus de fiabilité Plus de confort. Et plus d attention à l environnement.
 OTIS Mod La modernisation réinventée Plus de sécurité Plus de fiabilité Plus de confort Et plus d attention à l environnement. GeN2 Mod, un concept novateur. ➍ CÂBLE TRADITIONNEL EN ACIER ➌ ➋ ➌ ➌ POULIE
OTIS Mod La modernisation réinventée Plus de sécurité Plus de fiabilité Plus de confort Et plus d attention à l environnement. GeN2 Mod, un concept novateur. ➍ CÂBLE TRADITIONNEL EN ACIER ➌ ➋ ➌ ➌ POULIE
Statistiques Descriptives à une dimension
 I. Introduction et Définitions 1. Introduction La statistique est une science qui a pour objectif de recueillir et de traiter les informations, souvent en très grand nombre. Elle regroupe l ensemble des
I. Introduction et Définitions 1. Introduction La statistique est une science qui a pour objectif de recueillir et de traiter les informations, souvent en très grand nombre. Elle regroupe l ensemble des
MESURE ET PRECISION. Il est clair que si le voltmètre mesure bien la tension U aux bornes de R, l ampèremètre, lui, mesure. R mes. mes. .
 MESURE ET PRECISIO La détermination de la valeur d une grandeur G à partir des mesures expérimentales de grandeurs a et b dont elle dépend n a vraiment de sens que si elle est accompagnée de la précision
MESURE ET PRECISIO La détermination de la valeur d une grandeur G à partir des mesures expérimentales de grandeurs a et b dont elle dépend n a vraiment de sens que si elle est accompagnée de la précision
Jouve, 18, rue Saint-Denis, 75001 PARIS
 19 à Europâisches Patentamt European Patent Office Office européen des brevets Numéro de publication : 0 645 740 A1 12 DEMANDE DE BREVET EUROPEEN @ Numéro de dépôt : 94402079.1 @ Int. ci.6: G07B 17/04,
19 à Europâisches Patentamt European Patent Office Office européen des brevets Numéro de publication : 0 645 740 A1 12 DEMANDE DE BREVET EUROPEEN @ Numéro de dépôt : 94402079.1 @ Int. ci.6: G07B 17/04,
SCIENCES INDUSTRIELLES POUR L INGÉNIEUR. Partie I - Analyse système
 SCIENCES INDUSTRIELLES POUR L INGÉNIEUR COMPORTEMENT DYNAMIQUE D UN VEHICULE AUTO-BALANCÉ DE TYPE SEGWAY Partie I - Analyse système Poignée directionnelle Barre d appui Plate-forme Photographies 1 Le support
SCIENCES INDUSTRIELLES POUR L INGÉNIEUR COMPORTEMENT DYNAMIQUE D UN VEHICULE AUTO-BALANCÉ DE TYPE SEGWAY Partie I - Analyse système Poignée directionnelle Barre d appui Plate-forme Photographies 1 Le support
Actions de réduction de bruit sur un moteur poids lourd
 10 Actions de réduction de bruit sur un moteur poids lourd Laurent Moulin, Renault VI, 99, route de Lyon, 69802 Saint Priest, e-mail : [email protected] D epuis 1974 à aujourd hui, la réglementation
10 Actions de réduction de bruit sur un moteur poids lourd Laurent Moulin, Renault VI, 99, route de Lyon, 69802 Saint Priest, e-mail : [email protected] D epuis 1974 à aujourd hui, la réglementation
véhicule hybride (première
 La motorisation d un véhicule hybride (première HERVÉ DISCOURS [1] La cherté et la raréfaction du pétrole ainsi que la sensibilisation du public à l impact de son exploitation sur l environnement conduisent
La motorisation d un véhicule hybride (première HERVÉ DISCOURS [1] La cherté et la raréfaction du pétrole ainsi que la sensibilisation du public à l impact de son exploitation sur l environnement conduisent
Intérêts et limites des mannequins numériques pour l évaluation des efforts et des postures
 18 novembre 2014 Intérêts et limites des mannequins numériques pour l évaluation des efforts et des postures Jonathan Savin Responsable d études Laboratoire Ingénierie de Conception de Systèmes Sûrs (ICS-INRS)
18 novembre 2014 Intérêts et limites des mannequins numériques pour l évaluation des efforts et des postures Jonathan Savin Responsable d études Laboratoire Ingénierie de Conception de Systèmes Sûrs (ICS-INRS)
Stockage de chaleur solaire par sorption : Analyse et contrôle du système à partir de sa simulation dynamique
 Stockage de chaleur solaire par sorption : Analyse et contrôle du système à partir de sa simulation dynamique Kokouvi Edem N TSOUKPOE 1, Nolwenn LE PIERRÈS 1*, Lingai LUO 1 1 LOCIE, CNRS FRE3220-Université
Stockage de chaleur solaire par sorption : Analyse et contrôle du système à partir de sa simulation dynamique Kokouvi Edem N TSOUKPOE 1, Nolwenn LE PIERRÈS 1*, Lingai LUO 1 1 LOCIE, CNRS FRE3220-Université
a) La technique de l analyse discriminante linéaire : une brève présentation. 3 étapes de la méthode doivent être distinguées :
 La technique de l analyse discriminante linéaire : une brève présentation. 3 étapes de la méthode doivent être distinguées :") a) La technique de l analyse discriminante linéaire : une brève présentation. Nous nous limiterons ici à l'analyse discriminante linéaire et à deux groupes : - linéaire, la variante utilisée par ALTMAN
a) La technique de l analyse discriminante linéaire : une brève présentation. Nous nous limiterons ici à l'analyse discriminante linéaire et à deux groupes : - linéaire, la variante utilisée par ALTMAN
!-.!#- $'( 1&) &) (,' &*- %,!
 &) (,' &*- %,!") 0 $'( 1&) +&&/ ( &+&& &+&))&( -.#- 2& -.#- &) (,' %&,))& &)+&&) &- $ 3.#( %, (&&/ 0 ' Il existe plusieurs types de simulation de flux Statique ou dynamique Stochastique ou déterministe A événements discrets
0 $'( 1&) +&&/ ( &+&& &+&))&( -.#- 2& -.#- &) (,' %&,))& &)+&&) &- $ 3.#( %, (&&/ 0 ' Il existe plusieurs types de simulation de flux Statique ou dynamique Stochastique ou déterministe A événements discrets
Relais d'arrêt d'urgence, protecteurs mobiles
 PNOZ Relais jusqu'en d'arrêt 11 catégorie d'urgence, 4, EN 954-1 protecteurs mobiles Bloc logique de sécurité pour la surveillance de poussoirs d'arrêt d'urgence et de protecteurs mobiles Homologations
PNOZ Relais jusqu'en d'arrêt 11 catégorie d'urgence, 4, EN 954-1 protecteurs mobiles Bloc logique de sécurité pour la surveillance de poussoirs d'arrêt d'urgence et de protecteurs mobiles Homologations
Capteur mécanique universel HF 32/2/B
 Capteur mécanique universel HF 32/2/B Instructions matériel conforme aux directives CE d emploi et d entretien MS 32/2/B R 3/3 CONSIGNES PRIORITAIRES 2 INSTALLATION DU CAPTEUR HF 32 3 4-5 INSTALLATION
Capteur mécanique universel HF 32/2/B Instructions matériel conforme aux directives CE d emploi et d entretien MS 32/2/B R 3/3 CONSIGNES PRIORITAIRES 2 INSTALLATION DU CAPTEUR HF 32 3 4-5 INSTALLATION
Avis de l IRSN sur la tenue en service des cuves des réacteurs de 900 MWe, aspect neutronique et thermohydraulique
 Avis DSR/2010-065 26 février 2010 Avis de l IRSN sur la tenue en service des cuves des réacteurs de 900 MWe, aspect neutronique et thermohydraulique Par lettre du 19 février 2009, l Autorité de sûreté
Avis DSR/2010-065 26 février 2010 Avis de l IRSN sur la tenue en service des cuves des réacteurs de 900 MWe, aspect neutronique et thermohydraulique Par lettre du 19 février 2009, l Autorité de sûreté
CHAPITRE VIII : Les circuits avec résistances ohmiques
 CHAPITRE VIII : Les circuits avec résistances ohmiques VIII. 1 Ce chapitre porte sur les courants et les différences de potentiel dans les circuits. VIII.1 : Les résistances en série et en parallèle On
CHAPITRE VIII : Les circuits avec résistances ohmiques VIII. 1 Ce chapitre porte sur les courants et les différences de potentiel dans les circuits. VIII.1 : Les résistances en série et en parallèle On
UFR de Sciences Economiques Année 2008-2009 TESTS PARAMÉTRIQUES
 Université Paris 13 Cours de Statistiques et Econométrie I UFR de Sciences Economiques Année 2008-2009 Licence de Sciences Economiques L3 Premier semestre TESTS PARAMÉTRIQUES Remarque: les exercices 2,
Université Paris 13 Cours de Statistiques et Econométrie I UFR de Sciences Economiques Année 2008-2009 Licence de Sciences Economiques L3 Premier semestre TESTS PARAMÉTRIQUES Remarque: les exercices 2,
SOCLE COMMUN - La Compétence 3 Les principaux éléments de mathématiques et la culture scientifique et technologique
 SOCLE COMMUN - La Compétence 3 Les principaux éléments de mathématiques et la culture scientifique et technologique DOMAINE P3.C3.D1. Pratiquer une démarche scientifique et technologique, résoudre des
SOCLE COMMUN - La Compétence 3 Les principaux éléments de mathématiques et la culture scientifique et technologique DOMAINE P3.C3.D1. Pratiquer une démarche scientifique et technologique, résoudre des
Nom-Projet MODELE PLAN DE MANAGEMENT DE PROJET
 Nom-Projet MODELE PLAN DE MANAGEMENT DE PROJET Glossaire La terminologie propre au projet, ainsi que les abréviations et sigles utilisés sont définis dans le Glossaire. Approbation Décision formelle, donnée
Nom-Projet MODELE PLAN DE MANAGEMENT DE PROJET Glossaire La terminologie propre au projet, ainsi que les abréviations et sigles utilisés sont définis dans le Glossaire. Approbation Décision formelle, donnée
LA PUISSANCE DES MOTEURS. Avez-vous déjà feuilleté le catalogue d un grand constructeur automobile?
 LA PUISSANCE DES MOTEURS Avez-vous déjà feuilleté le catalogue d un grand constructeur automobile? Chaque modèle y est décliné en plusieurs versions, les différences portant essentiellement sur la puissance
LA PUISSANCE DES MOTEURS Avez-vous déjà feuilleté le catalogue d un grand constructeur automobile? Chaque modèle y est décliné en plusieurs versions, les différences portant essentiellement sur la puissance
Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant
 Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant I Présentation I.1 La roue autonome Ez-Wheel SAS est une entreprise française de technologie innovante fondée en 2009.
Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant I Présentation I.1 La roue autonome Ez-Wheel SAS est une entreprise française de technologie innovante fondée en 2009.
Transmission d informations sur le réseau électrique
 Transmission d informations sur le réseau électrique Introduction Remarques Toutes les questions en italique devront être préparées par écrit avant la séance du TP. Les préparations seront ramassées en
Transmission d informations sur le réseau électrique Introduction Remarques Toutes les questions en italique devront être préparées par écrit avant la séance du TP. Les préparations seront ramassées en
Perrothon Sandrine UV Visible. Spectrophotométrie d'absorption moléculaire Étude et dosage de la vitamine B 6
 Spectrophotométrie d'absorption moléculaire Étude et dosage de la vitamine B 6 1 1.But et théorie: Le but de cette expérience est de comprendre l'intérêt de la spectrophotométrie d'absorption moléculaire
Spectrophotométrie d'absorption moléculaire Étude et dosage de la vitamine B 6 1 1.But et théorie: Le but de cette expérience est de comprendre l'intérêt de la spectrophotométrie d'absorption moléculaire
Figure 1 : représentation des différents écarts
 ulletin officiel spécial n 9 du 30 septembre 2010 Annexe SIENES DE L INGÉNIEUR YLE TERMINAL DE LA SÉRIE SIENTIFIQUE I - Objectifs généraux Notre société devra relever de nombreux défis dans les prochaines
ulletin officiel spécial n 9 du 30 septembre 2010 Annexe SIENES DE L INGÉNIEUR YLE TERMINAL DE LA SÉRIE SIENTIFIQUE I - Objectifs généraux Notre société devra relever de nombreux défis dans les prochaines
I- Définitions des signaux.
 101011011100 010110101010 101110101101 100101010101 Du compact-disc, au DVD, en passant par l appareil photo numérique, le scanner, et télévision numérique, le numérique a fait une entrée progressive mais
101011011100 010110101010 101110101101 100101010101 Du compact-disc, au DVD, en passant par l appareil photo numérique, le scanner, et télévision numérique, le numérique a fait une entrée progressive mais
MACHINES DE SCIAGE ET TRONCONNAGE MACHINES SPECIALES R 80 CN. Machine à commande numérique destinée au tronçonnage des dés.
 MACHINES DE SCIAGE ET TRONCONNAGE MACHINES SPECIALES R 80 CN Machine à commande numérique destinée au tronçonnage des dés. 2350 4792 - Hauteur : 1730 mm - Poids : 1052 kg Chevrons Longueur maxi * : 3 m
MACHINES DE SCIAGE ET TRONCONNAGE MACHINES SPECIALES R 80 CN Machine à commande numérique destinée au tronçonnage des dés. 2350 4792 - Hauteur : 1730 mm - Poids : 1052 kg Chevrons Longueur maxi * : 3 m
Degré de confiance pour les indicateurs de performance : degré de fiabilité du processus de production et écart significatif 1
 Degré de confiance pour les indicateurs de performance : degré de fiabilité du processus de production et écart significatif 1 L utilisation des indicateurs de performance ne peut se faire de manière pertinente
Degré de confiance pour les indicateurs de performance : degré de fiabilité du processus de production et écart significatif 1 L utilisation des indicateurs de performance ne peut se faire de manière pertinente
Développement de lois et de structures de réglages destinées à la téléopération avec retour d effort
 Développement de lois et de structures de réglages destinées à la téléopération avec retour d effort Thomas Delwiche, Laurent Catoire et Michel Kinnaert Faculté des Sciences Appliquées Service d Automatique
Développement de lois et de structures de réglages destinées à la téléopération avec retour d effort Thomas Delwiche, Laurent Catoire et Michel Kinnaert Faculté des Sciences Appliquées Service d Automatique
Projet de synthèse de l'électronique analogique : réalisation d'une balance à jauges de contrainte
 J3eA, Journal sur l enseignement des sciences et technologies de l information et des systèmes, Volume 4, HorsSérie 2, 20 (2005) DOI : http://dx.doi.org/10.1051/bibj3ea:2005720 EDP Sciences, 2005 Projet
J3eA, Journal sur l enseignement des sciences et technologies de l information et des systèmes, Volume 4, HorsSérie 2, 20 (2005) DOI : http://dx.doi.org/10.1051/bibj3ea:2005720 EDP Sciences, 2005 Projet
Electrotechnique. Fabrice Sincère ; version 3.0.5 http://pagesperso-orange.fr/fabrice.sincere/
 Electrotechnique Fabrice Sincère ; version 3.0.5 http://pagesperso-orange.fr/fabrice.sincere/ 1 Sommaire 1 ère partie : machines électriques Chapitre 1 Machine à courant continu Chapitre 2 Puissances électriques
Electrotechnique Fabrice Sincère ; version 3.0.5 http://pagesperso-orange.fr/fabrice.sincere/ 1 Sommaire 1 ère partie : machines électriques Chapitre 1 Machine à courant continu Chapitre 2 Puissances électriques
Accesibilité. Nous élevons votre qualité de vie
 Accesibilité Nous élevons votre qualité de vie Nous élevons votre quialité de vie La société fut fondée en 1923 par M. Guillermo Fabián Fischer, un ressortissant allemand résidant en Espagne. Elle fut
Accesibilité Nous élevons votre qualité de vie Nous élevons votre quialité de vie La société fut fondée en 1923 par M. Guillermo Fabián Fischer, un ressortissant allemand résidant en Espagne. Elle fut
AUTRES ASPECTS DU GPS. Partie I : tolérance de Battement Partie II : tolérancement par frontières
 AUTRES ASPECTS DU GPS Partie I : tolérance de Battement Partie II : tolérancement par frontières 1 Partie I Tolérance de battement Défaut de Battement Défautconjuguéde forme, orientation et position, constatélorsde
AUTRES ASPECTS DU GPS Partie I : tolérance de Battement Partie II : tolérancement par frontières 1 Partie I Tolérance de battement Défaut de Battement Défautconjuguéde forme, orientation et position, constatélorsde
1 Définition. 2 Systèmes matériels et solides. 3 Les actions mécaniques. Le système matériel : Il peut être un ensemble.un sous-ensemble..
 1 Définition GÉNÉRALITÉS Statique 1 2 Systèmes matériels et solides Le système matériel : Il peut être un ensemble.un sous-ensemble..une pièce mais aussi un liquide ou un gaz Le solide : Il est supposé
1 Définition GÉNÉRALITÉS Statique 1 2 Systèmes matériels et solides Le système matériel : Il peut être un ensemble.un sous-ensemble..une pièce mais aussi un liquide ou un gaz Le solide : Il est supposé
Module : systèmes asservis linéaires
 BS2EL - Physique appliquée Module : systèmes asservis linéaires Diaporamas : les asservissements Résumé de cours 1- Structure d un système asservi 2- Transmittances en boucle ouverte et ermée 3- Stabilité
BS2EL - Physique appliquée Module : systèmes asservis linéaires Diaporamas : les asservissements Résumé de cours 1- Structure d un système asservi 2- Transmittances en boucle ouverte et ermée 3- Stabilité
Vis à billes de précision à filets rectifiés
 sommaire Calculs : - Capacités de charges / Durée de vie - Vitesse et charges moyennes 26 - Rendement / Puissance motrice - Vitesse critique / Flambage 27 - Précharge / Rigidité 28 Exemples de calcul 29
sommaire Calculs : - Capacités de charges / Durée de vie - Vitesse et charges moyennes 26 - Rendement / Puissance motrice - Vitesse critique / Flambage 27 - Précharge / Rigidité 28 Exemples de calcul 29
Exemple d acquisition automatique de mesures sur une maquette de contrôle actif de vibrations
 Exemple d acquisition automatique de mesures sur une maquette de contrôle actif de vibrations Valérie Pommier-Budinger Bernard Mouton - Francois Vincent ISAE Institut Supérieur de l Aéronautique et de
Exemple d acquisition automatique de mesures sur une maquette de contrôle actif de vibrations Valérie Pommier-Budinger Bernard Mouton - Francois Vincent ISAE Institut Supérieur de l Aéronautique et de
Cours (7) de statistiques à distance, élaboré par Zarrouk Fayçal, ISSEP Ksar-Said, 2011-2012 LES STATISTIQUES INFERENTIELLES
 de statistiques à distance, élaboré par Zarrouk Fayçal, ISSEP Ksar-Said, 2011-2012 LES STATISTIQUES INFERENTIELLES") LES STATISTIQUES INFERENTIELLES (test de Student) L inférence statistique est la partie des statistiques qui, contrairement à la statistique descriptive, ne se contente pas de décrire des observations,
LES STATISTIQUES INFERENTIELLES (test de Student) L inférence statistique est la partie des statistiques qui, contrairement à la statistique descriptive, ne se contente pas de décrire des observations,
APPLICATION DU SCN A L'EVALUATION DES REVENUS NON DECLARES DES MENAGES
 4 mars 1996 FRANCAIS Original : RUSSE COMMISSION DE STATISTIQUE et COMMISSION ECONOMIQUE POUR L'EUROPE CONFERENCE DES STATISTICIENS EUROPEENS OFFICE STATISTIQUE DES COMMUNAUTES EUROPEENNES (EUROSTAT) ORGANISATION
4 mars 1996 FRANCAIS Original : RUSSE COMMISSION DE STATISTIQUE et COMMISSION ECONOMIQUE POUR L'EUROPE CONFERENCE DES STATISTICIENS EUROPEENS OFFICE STATISTIQUE DES COMMUNAUTES EUROPEENNES (EUROSTAT) ORGANISATION
FICHE 1 Fiche à destination des enseignants
 FICHE 1 Fiche à destination des enseignants 1S 8 (b) Un entretien d embauche autour de l eau de Dakin Type d'activité Activité expérimentale avec démarche d investigation Dans cette version, l élève est
FICHE 1 Fiche à destination des enseignants 1S 8 (b) Un entretien d embauche autour de l eau de Dakin Type d'activité Activité expérimentale avec démarche d investigation Dans cette version, l élève est
1 ère partie : tous CAP sauf hôtellerie et alimentation CHIMIE ETRE CAPABLE DE. PROGRAMME - Atomes : structure, étude de quelques exemples.
 Référentiel CAP Sciences Physiques Page 1/9 SCIENCES PHYSIQUES CERTIFICATS D APTITUDES PROFESSIONNELLES Le référentiel de sciences donne pour les différentes parties du programme de formation la liste
Référentiel CAP Sciences Physiques Page 1/9 SCIENCES PHYSIQUES CERTIFICATS D APTITUDES PROFESSIONNELLES Le référentiel de sciences donne pour les différentes parties du programme de formation la liste
SDLV120 - Absorption d'une onde de compression dans un barreau élastique
 Titre : SDLV120 - Absorption d'une onde de compression dan[...] Date : 09/11/2011 Page : 1/9 SDLV120 - Absorption d'une onde de compression dans un barreau élastique Résumé On teste les éléments paraxiaux
Titre : SDLV120 - Absorption d'une onde de compression dan[...] Date : 09/11/2011 Page : 1/9 SDLV120 - Absorption d'une onde de compression dans un barreau élastique Résumé On teste les éléments paraxiaux
EXAMEN : CAP ADAL SESSION 2011 N du sujet : 02.11 SPECIALITE : CEB - GEPER SUJET SECTEUR : FOLIO : 1/6 EPREUVE : EG2 (MATH-SCIENCES)
") EXAMEN : CAP ADAL SESSION 20 N du sujet : 02. FOLIO : /6 Rédiger les réponses sur ce document qui sera intégralement remis à la fin de l épreuve. L usage de la calculatrice est autorisé. Exercice : (7
EXAMEN : CAP ADAL SESSION 20 N du sujet : 02. FOLIO : /6 Rédiger les réponses sur ce document qui sera intégralement remis à la fin de l épreuve. L usage de la calculatrice est autorisé. Exercice : (7
Varset Direct. Batteries fixes de condensateurs basse tension Coffrets et armoires. Notice d utilisation. Armoire A2
 Varset Direct Batteries fixes de condensateurs basse tension Coffrets et armoires Notice d utilisation Coffret C1 Coffret C2 Armoire A2 Réception DB110591 Présentation Varset Direct est une batterie fixe
Varset Direct Batteries fixes de condensateurs basse tension Coffrets et armoires Notice d utilisation Coffret C1 Coffret C2 Armoire A2 Réception DB110591 Présentation Varset Direct est une batterie fixe
CONFERENCE PALISADE. Optimisation robuste d un plan d expériences par simulation Monte-Carlo Concepts de «Design Space» et de «Quality by Design»
 CONFERENCE PALISADE Optimisation robuste d un plan d expériences par simulation Monte-Carlo Concepts de «Design Space» et de «Quality by Design» 1 SIGMA PLUS Logiciels, Formations et Etudes Statistiques
CONFERENCE PALISADE Optimisation robuste d un plan d expériences par simulation Monte-Carlo Concepts de «Design Space» et de «Quality by Design» 1 SIGMA PLUS Logiciels, Formations et Etudes Statistiques
CONCEPTION Support de cours n 3 DE BASES DE DONNEES
 CONCEPTION Support de cours n 3 DE BASES DE DONNEES Auteur: Raymonde RICHARD PRCE UBO PARTIE III. - LA DESCRIPTION LOGIQUE ET PHYSIQUE DES DONNEES... 2 A. Les concepts du modèle relationnel de données...
CONCEPTION Support de cours n 3 DE BASES DE DONNEES Auteur: Raymonde RICHARD PRCE UBO PARTIE III. - LA DESCRIPTION LOGIQUE ET PHYSIQUE DES DONNEES... 2 A. Les concepts du modèle relationnel de données...
Gestion de Projet. Génie Logiciel. Renaud Marlet. LaBRI / INRIA. http://www.labri.fr/~marlet. (d'après A.-M. Hugues) màj 19/04/2007
 màj 19/04/2007") 1 Génie Logiciel (d'après A.-M. Hugues) Gestion de Projet Renaud Marlet LaBRI / INRIA http://www.labri.fr/~marlet màj 19/0/007 Est-ce bien nécessaire? Principes de gestion = beaucoup d'évidences Pourtant
1 Génie Logiciel (d'après A.-M. Hugues) Gestion de Projet Renaud Marlet LaBRI / INRIA http://www.labri.fr/~marlet màj 19/0/007 Est-ce bien nécessaire? Principes de gestion = beaucoup d'évidences Pourtant
(Customer Relationship Management, «Gestion de la Relation Client»)
") (Customer Relationship Management, «Gestion de la Relation Client») Les Banques et sociétés d assurance sont aujourd'hui confrontées à une concurrence de plus en plus vive et leur stratégie " clientèle
(Customer Relationship Management, «Gestion de la Relation Client») Les Banques et sociétés d assurance sont aujourd'hui confrontées à une concurrence de plus en plus vive et leur stratégie " clientèle
LA MESURE INDUSTRIELLE
 E02 LA MESURE INDUSTRIELLE 20 Heures Technicien responsable de la maintenance Approfondir les techniques de mesure; Prendre en compte l aspect métrologie. Connaître les limites et les facteurs d influences
E02 LA MESURE INDUSTRIELLE 20 Heures Technicien responsable de la maintenance Approfondir les techniques de mesure; Prendre en compte l aspect métrologie. Connaître les limites et les facteurs d influences
FONCTION DE DEMANDE : REVENU ET PRIX
 FONCTION DE DEMANDE : REVENU ET PRIX 1. L effet d une variation du revenu. Les lois d Engel a. Conditions du raisonnement : prix et goûts inchangés, variation du revenu (statique comparative) b. Partie
FONCTION DE DEMANDE : REVENU ET PRIX 1. L effet d une variation du revenu. Les lois d Engel a. Conditions du raisonnement : prix et goûts inchangés, variation du revenu (statique comparative) b. Partie
Analyse des coûts. 1 ère année DUT GEA, 2005/2006 Analyse des coûts
 Analyse des coûts Les techniques de calcul et d analyse des coûts portent le nom de comptabilité analytique ou comptabilité de gestion. Ces deux termes seront utilisés indifféremment dans ce cours. Contrairement
Analyse des coûts Les techniques de calcul et d analyse des coûts portent le nom de comptabilité analytique ou comptabilité de gestion. Ces deux termes seront utilisés indifféremment dans ce cours. Contrairement
Méthodologies de développement de logiciels de gestion
 Méthodologies de développement de logiciels de gestion Chapitre 5 Traits caractéristiques des deux approches de méthodologie Présentation réalisée par P.-A. Sunier Professeur à la HE-Arc de Neuchâtel http://lgl.isnetne.ch
Méthodologies de développement de logiciels de gestion Chapitre 5 Traits caractéristiques des deux approches de méthodologie Présentation réalisée par P.-A. Sunier Professeur à la HE-Arc de Neuchâtel http://lgl.isnetne.ch
association adilca www.adilca.com LE COUPLE MOTEUR
 LE COUPLE MOTEUR Quelles sont les caractéristiques essentielles d un véhicule à moteur? Les services marketing le savent, c est la puissance et la vitesse maximale qui, au premier abord, focalisent l attention
LE COUPLE MOTEUR Quelles sont les caractéristiques essentielles d un véhicule à moteur? Les services marketing le savent, c est la puissance et la vitesse maximale qui, au premier abord, focalisent l attention
Activités numériques [13 Points]
![Activités numériques [13 Points]](/thumbs/21/1117704.jpg "Activités numériques [13 Points]") N du candidat L emploi de la calculatrice est autorisé. Le soin, la qualité de la présentation entrent pour 2 points dans l appréciation des copies. Les résultats seront soulignés. La correction est disponible
N du candidat L emploi de la calculatrice est autorisé. Le soin, la qualité de la présentation entrent pour 2 points dans l appréciation des copies. Les résultats seront soulignés. La correction est disponible
QUESTIONNAIRE DE PRE-AUDIT. Rubrique n 1 : Présentation de l entreprise
 QUESTIONNAIRE DE PRE-AUDIT MISE A NIVEAU DE L ENTREPRISE PAR LE GENIE INDUSTRIEL Pré-audit réalisé le... Rédacteur(s). Rubrique n 1 : Présentation de l entreprise Renseignements généraux - Identité de
QUESTIONNAIRE DE PRE-AUDIT MISE A NIVEAU DE L ENTREPRISE PAR LE GENIE INDUSTRIEL Pré-audit réalisé le... Rédacteur(s). Rubrique n 1 : Présentation de l entreprise Renseignements généraux - Identité de
Introduction à l approche bootstrap
 Introduction à l approche bootstrap Irène Buvat U494 INSERM buvat@imedjussieufr 25 septembre 2000 Introduction à l approche bootstrap - Irène Buvat - 21/9/00-1 Plan du cours Qu est-ce que le bootstrap?
Introduction à l approche bootstrap Irène Buvat U494 INSERM buvat@imedjussieufr 25 septembre 2000 Introduction à l approche bootstrap - Irène Buvat - 21/9/00-1 Plan du cours Qu est-ce que le bootstrap?
Monte charge de cuisine PRESENTATION DU MONTE CHARGE
 Nom.. Prénom.. Monte charge de cuisine Réalisation /0 Mise en service /0 Dépannage /0 PRESENTATION DU MONTE CHARGE M ~ S0 (Atu) S (appel pour monter) S (descente) H (descendez les déchets S.V.P.!) Sh Salle
Nom.. Prénom.. Monte charge de cuisine Réalisation /0 Mise en service /0 Dépannage /0 PRESENTATION DU MONTE CHARGE M ~ S0 (Atu) S (appel pour monter) S (descente) H (descendez les déchets S.V.P.!) Sh Salle
Centre de tournage. et de fraisage CNC TNX65/42
 Centre de tournage et de fraisage CNC TNX65/42 Le tour TRAUB TNX65/42 pose de nouveaux jalons dans l'usinage à haute performance. Le concept de machine futuriste avec l'incomparable nouvelle unité de fraisage
Centre de tournage et de fraisage CNC TNX65/42 Le tour TRAUB TNX65/42 pose de nouveaux jalons dans l'usinage à haute performance. Le concept de machine futuriste avec l'incomparable nouvelle unité de fraisage
Concours EPITA 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette BMW K1200S
 Concours EPIT 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette MW K1200S Durée : 2h. Calculatrices autorisées. Présentation du problème Le problème
Concours EPIT 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette MW K1200S Durée : 2h. Calculatrices autorisées. Présentation du problème Le problème
MultiPlus sans limites
 MultiPlus sans limites La maîtrise de l'énergie avec le Phoenix Multi/MultiPlus de Victron Energy Parfois les possibilités offertes par un nouveau produit sont si uniques qu'elles sont difficiles à comprendre,
MultiPlus sans limites La maîtrise de l'énergie avec le Phoenix Multi/MultiPlus de Victron Energy Parfois les possibilités offertes par un nouveau produit sont si uniques qu'elles sont difficiles à comprendre,
Plate-formes inclinées SUPRA & SUPRA LINEA
 Plate-formes inclinées SUPRA & SUPRA LINEA SUPRA LINEA - pour les escaliers droits Supra Linea économise l espace et est caractérisé par ses couleurs douces, ses bords arrondis et ses barrières pliables.
Plate-formes inclinées SUPRA & SUPRA LINEA SUPRA LINEA - pour les escaliers droits Supra Linea économise l espace et est caractérisé par ses couleurs douces, ses bords arrondis et ses barrières pliables.
COMMANDER la puissance par MODULATION COMMUNIQUER
 SERIE 4 MODULER - COMMUNIQUER Fonctions du programme abordées : COMMANDER la puissance par MODULATION COMMUNIQUER Objectifs : Réaliser le câblage d un modulateur d après le schéma de puissance et de commande,
SERIE 4 MODULER - COMMUNIQUER Fonctions du programme abordées : COMMANDER la puissance par MODULATION COMMUNIQUER Objectifs : Réaliser le câblage d un modulateur d après le schéma de puissance et de commande,
La problématique des tests. Cours V. 7 mars 2008. Comment quantifier la performance d un test? Hypothèses simples et composites
 La problématique des tests Cours V 7 mars 8 Test d hypothèses [Section 6.1] Soit un modèle statistique P θ ; θ Θ} et des hypothèses H : θ Θ H 1 : θ Θ 1 = Θ \ Θ Un test (pur) est une statistique à valeur
La problématique des tests Cours V 7 mars 8 Test d hypothèses [Section 6.1] Soit un modèle statistique P θ ; θ Θ} et des hypothèses H : θ Θ H 1 : θ Θ 1 = Θ \ Θ Un test (pur) est une statistique à valeur
500 W sur 13cm avec les modules PowerWave
 500 W sur 13cm avec les modules PowerWave Philippe Borghini / F5jwf [email protected] Janvier 2012 Introduction Tout le monde a déjà vu au moins une fois, sur les puces, ces fameuses platines PowerWave
500 W sur 13cm avec les modules PowerWave Philippe Borghini / F5jwf [email protected] Janvier 2012 Introduction Tout le monde a déjà vu au moins une fois, sur les puces, ces fameuses platines PowerWave
ELEC2753 Electrotechnique examen du 11/06/2012
 ELEC2753 Electrotechnique examen du 11/06/2012 Pour faciliter la correction et la surveillance, merci de répondre aux 3 questions sur des feuilles différentes et d'écrire immédiatement votre nom sur toutes
ELEC2753 Electrotechnique examen du 11/06/2012 Pour faciliter la correction et la surveillance, merci de répondre aux 3 questions sur des feuilles différentes et d'écrire immédiatement votre nom sur toutes
Baccalauréat technologique
 Baccalauréat technologique Épreuve relative aux enseignements technologiques transversaux, épreuve de projet en enseignement spécifique à la spécialité et épreuve d'enseignement technologique en langue
Baccalauréat technologique Épreuve relative aux enseignements technologiques transversaux, épreuve de projet en enseignement spécifique à la spécialité et épreuve d'enseignement technologique en langue
Chapitre 3. Les distributions à deux variables
 Chapitre 3. Les distributions à deux variables Jean-François Coeurjolly http://www-ljk.imag.fr/membres/jean-francois.coeurjolly/ Laboratoire Jean Kuntzmann (LJK), Grenoble University 1 Distributions conditionnelles
Chapitre 3. Les distributions à deux variables Jean-François Coeurjolly http://www-ljk.imag.fr/membres/jean-francois.coeurjolly/ Laboratoire Jean Kuntzmann (LJK), Grenoble University 1 Distributions conditionnelles
Mesure de la couverture en propre du réseau d un opérateur mobile
 Mesure de la couverture en propre du réseau d un opérateur mobile Janvier Mars 2015 Rapport SOMMAIRE 1 SPECIFICATIONS DE L ENQUETE... 3 1.1 OBJECTIFS ET CONFIGURATION... 3 1.2 OUTIL DE MESURE ET TERMINAUX...
Mesure de la couverture en propre du réseau d un opérateur mobile Janvier Mars 2015 Rapport SOMMAIRE 1 SPECIFICATIONS DE L ENQUETE... 3 1.1 OBJECTIFS ET CONFIGURATION... 3 1.2 OUTIL DE MESURE ET TERMINAUX...
DRIVE-TECHNOLOGY INKOMA - GROUP. Actionneur pour panneaux solaires - ASN ALBERT
 DRIVE-TECHNOLOGY ALBERTINKOMA - GROUP Actionneur pour panneaux solaires - ASN ALBERT Maschinenfabrik ALBERT GmbH Technologiepark 2 A - 4851 Gampern (Autriche) Tél: +43/(0)7682-39080-10 Fax: +43/(0)7682-39080-99
DRIVE-TECHNOLOGY ALBERTINKOMA - GROUP Actionneur pour panneaux solaires - ASN ALBERT Maschinenfabrik ALBERT GmbH Technologiepark 2 A - 4851 Gampern (Autriche) Tél: +43/(0)7682-39080-10 Fax: +43/(0)7682-39080-99
OPTIMISATION À UNE VARIABLE
 OPTIMISATION À UNE VARIABLE Sommaire 1. Optimum locaux d'une fonction... 1 1.1. Maximum local... 1 1.2. Minimum local... 1 1.3. Points stationnaires et points critiques... 2 1.4. Recherche d'un optimum
OPTIMISATION À UNE VARIABLE Sommaire 1. Optimum locaux d'une fonction... 1 1.1. Maximum local... 1 1.2. Minimum local... 1 1.3. Points stationnaires et points critiques... 2 1.4. Recherche d'un optimum
Trépier avec règle, ressort à boudin, chronomètre, 5 masses de 50 g.
 PHYSQ 130: Hooke 1 LOI DE HOOKE: CAS DU RESSORT 1 Introduction La loi de Hooke est fondamentale dans l étude du mouvement oscillatoire. Elle est utilisée, entre autres, dans les théories décrivant les
PHYSQ 130: Hooke 1 LOI DE HOOKE: CAS DU RESSORT 1 Introduction La loi de Hooke est fondamentale dans l étude du mouvement oscillatoire. Elle est utilisée, entre autres, dans les théories décrivant les
Relais statiques SOLITRON MIDI, Commutation analogique, Multi Fonctions RJ1P
 Relais statiques SOLITRON MIDI, Commutation analogique, Multi Fonctions RJ1P Relais statique CA Multi fonctions - 5 sélections de modes de fonctionnement: angle de phase, trains d ondes distribuées et
Relais statiques SOLITRON MIDI, Commutation analogique, Multi Fonctions RJ1P Relais statique CA Multi fonctions - 5 sélections de modes de fonctionnement: angle de phase, trains d ondes distribuées et
Extrait des Exploitations Pédagogiques
 Pédagogiques Module : Compétitivité et créativité CI Première : Compétitivité et créativité CI institutionnel : Développement durable et compétitivité des produits Support : Robot - O : Caractériser les
Pédagogiques Module : Compétitivité et créativité CI Première : Compétitivité et créativité CI institutionnel : Développement durable et compétitivité des produits Support : Robot - O : Caractériser les
DOSSIER TECHNIQUE XP 12
 DOSSIER TECHNIQUE XP 12 I) Descriptif des éléments principaux Aile XP 12 a) Caractéristiques Surface 12,5 m2 Profil Double surface 90% Envergure 9,2 m Allongement 7,36 Longueur 3,1 m Poids 46 kg Dossier
DOSSIER TECHNIQUE XP 12 I) Descriptif des éléments principaux Aile XP 12 a) Caractéristiques Surface 12,5 m2 Profil Double surface 90% Envergure 9,2 m Allongement 7,36 Longueur 3,1 m Poids 46 kg Dossier