Sciences de l Ingénieur. Laveuse autoportée
|
|
|
- Matthieu Aubé
- il y a 5 ans
- Total affichages :
Transcription


1 Présentation de la laveuse Laveuse autoportée La société Nilfisk propose une large gamme d engins de nettoyage des sols. Celle des laveuses autoportées répond aux besoins de lavage pour des surfaces de plusieurs milliers de km carrés. C est par exemple le cas des sols de super et hypermarché. Les qualités de ces machines résident dans leur sécurité d usage, leur faible nuisance sur l environnement, leur autonomie et leur maniabilité. Cette maniabilité impose des encombrements minimisés en largeur et des rayons de giration très faibles. Figure 1 : Laveuse BR 752 Le modèle étudié dans ce sujet est la laveuse BR 752 dont la structure du châssis à trois roues est privilégiée pour autoriser des rayons de giration très petits. Ce sujet a pour but d analyser la transmission de puissance du moteur aux roues lors d un virage de la laveuse pour justifier les solutions technologiques utilisées. Les critères du cahier des charges relatifs à l exigence de déplacement sont donnés dans le tableau Figure 2. Expression Critères Valeurs Permettre à Vitesse en ligne droite -2 km/h V 6 km/h l utilisateur de laver Vitesse en mode lavage 0 km/h V 3 km/h le sol en se déplaçant Freinage sur la roue avant Rayon de courbure e/2 r Stabilité 45 marge de phase 10 db marge de gain Précision erreur en régime permanent pour une vitesse de consigne Vcons en ± 10 % ligne droite Dépassement sur la vitesse Rapidité : temps de réponse à 5 % de la commande en vitesse de la laveuse Figure 2 : Extrait du cahier des charges Aucun 0,5 s 1

, des capteurs permettent de mesurer la vitesse de rotation des roues.")
2 Partie 1 : étude de la laveuse en fonctionnement Le fonctionnement de la laveuse est le suivant : le conducteur commande le système via les pédales (accélération et frein) et le volant pour orienter le système. La carte de commande génère alors un ordre au variateur de vitesse qui distribue une énergie électrique adaptée au moteur électrique. Ce moteur électrique entraîne via un réducteur et un différentiel les deux roues arrières. Pour assurer l asservissement en vitesse des roues (et donc de la laveuse), des capteurs permettent de mesurer la vitesse de rotation des roues. Volant Pédales Figure 3 : Modèle simplifié de la laveuse La vitesse du véhicule sera caractérisée par la grandeur (, / ) = ( ) et l orientation de la laveuse sera caractérisée par le rayon de courbure ( ) = de la laveuse en virage avec centre du virage (voir Figure 4). Ce rayon de courbure est directement lié à la rotation ( ) du volant ou de la roue avant. Les vitesses angulaires des roues seront donc reliées aux deux grandeurs ( ) et ( ). Les hypothèses de déplacement sont les suivantes (Figure 4) : - la cinématique du mouvement de la laveuse par rapport au référentiel peut être considérée comme plane dans le plan (,, ). - le point est le centre du virage de la laveuse ; la laveuse est en mouvement de rotation de centre. - la roue arrière gauche est en liaison pivot d axe (, ) par rapport au châssis du véhicule. - la roue avant est en liaison pivot d axe (, ) par rapport à la direction du véhicule. - la roue arrière droite est en liaison pivot d axe (, ) par rapport au châssis du véhicule. - les deux roues arrière roulent sans glisser sur le sol. 2

3 Figure 4 : Lavage en vue de dessus dans un virage. Figure 5 : vue de côté de la roue arrière gauche 3
4 Notations : - les référentiels : = (,,, ) est fixe et lié au sol ; = (,,, ) avec = lié au véhicule; = (,,, ) avec = lié à la roue gauche; = (,,, ) avec = lié à la roue droite; = (,,, ) avec = lié à la roue avant; - les vecteurs taux de rotation : de la laveuse par rapport au sol : Ω ( / ) =. de la roue gauche par rapport au châssis Ω (R /R ) =. x avec = de la roue droite par rapport au châssis Ω ( / ) =. x avec = de la roue avant par rapport au châssis Ω ( / ) =. x +. z avec = - OO =. ; - O O = O O = avec = 0,6 m la largeur de la laveuse ; - O O = d. y avec d=0,84 m - les points de contact entre la roue avant la roue gauche - la roue droite - et le sol sont notés respectivement, et avec I O = I O = I O =., avec = 0,15 m, le rayon des roues ; - le torseur cinématique du solide par rapport au solide au point A sera noté : / = Ω /, / = Donner le torseur cinématique du véhicule par rapport au sol, / au point O. Calculer, / en fonction de r et. En déduire l expression de V en fonction de r et. 2. En déduire, / en fonction de V, d et. 3. Donner le torseur cinématique de la roue avant par rapport à la laveuse / au point O. En déduire, / en fonction du rayon de la roue R et de. 4. Déterminer la vitesse de glissement de la roue avant par rapport au sol (, /0) 5. Déduire de la relation de roulement sans glissement en l expression de en fonction de,, puis en fonction de r et d. 6. Caractériser la nature du triangle ( ) et en déduire la condition à avoir sur x pour respecter le roulement sans glissement. 4
5 7. Dessiner sur le Document réponse 1 la position du centre du virage compte-tenu de l inclinaison de la roue avant. 8. Dans les deux cas ci-dessous, donner sans calcul la valeur de r et la relation entre ω et ω : - si la laveuse tourne sur elle-même, cela signifie qu elle tourne autour de l axe (O, z ) ; - si la laveuse va en ligne droite ; Donner la valeur de r et de si la laveuse tourne autour de la roue gauche. 9. Expliquer en quelques lignes, comment peut-on obtenir les relations donnant les vitesses angulaires = et = en fonction de V, r, R et e : = et = + Pour un angle de 30, on trace sur la Figure 6 l'évolution des vitesses angulaires des roues. Figure 6 : Evolution des vitesses angulaires des roues 10. Déterminer analytiquement le rapport pour un angle de 30 à l aide des relations issues des questions 5 et 9. Vérifier le rapport à partir des courbes de la figure 6. Les roues sont commandées directement par un seul moteur à courant continu. Il faut donc ajouter un mécanisme permettant d autoriser des vitesses différentes lors des virages. 5

6 On utilise un différentiel dont le schéma cinématique est donné ci-après. Les nombres de dents des roues dentées sont notés Z. La roue gauche est reliée à la pièce 41, la roue droite à la pièce 42 et le moteur est relié à la pièce 1. Le différentiel est un train épicycloïdal particulier. Figure 7 : Schéma cinématique du différentiel 11. Le train épicycloïdal est composé des pièces 2, 3, 41 et 42 : nommer ces pièces parmi les propositions suivantes : planétaires, satellites, portes satellite (Figure 7). Que dire de l engrenage 1-2? 12. En se plaçant dans le référentiel du porte-satellite, montrer la raison basique du différentiel est égale à -1. On a Z 41 =Z En déduire la relation entre les rotations des roues 41/0 et 42/0 avec la rotation du moteur 1/0. On constate donc qu il suffit de contrôler la vitesse du moteur pour effectuer un virage. Il est nécessaire de connaître la vitesse du moteur pour pouvoir afficher la vitesse du véhicule sur le pupitre de la laveuse. En utilisant les coefficients déterminés précédemment, il est possible de calculer cette vitesse. La vitesse du moteur est captée par une génératrice tachymétrique placée sur l axe moteur (elle fonctionne comme un moteur à courant continu mais à l envers, une vitesse entraîne l apparition d une tension). La vitesse de la laveuse peut varier de -2 km/h à 6 km/h d après le cahier des charges. La mesure faite par la génératrice tachymétrique est ensuite convertie en un mot de 5 bits. La vitesse doit s afficher avec une précision de 0,3 km/h. 14. Calculer la plus petite variation de vitesse de la laveuse qui pourra être mesurée (attention les vitesses peuvent être négatives!). Conclure quant au respect du cahier des charges au regard de la précision de cette mesure. 6
.")
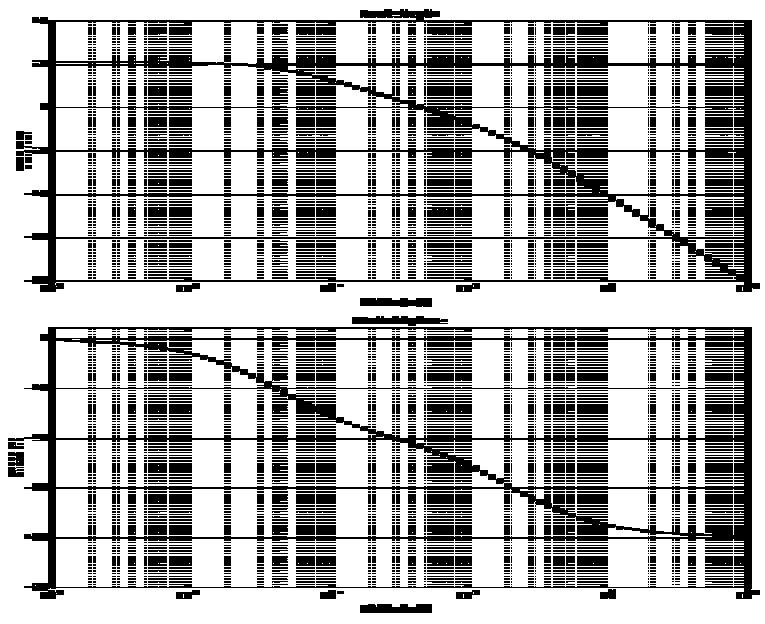
7 La tension issue de la génératrice tachymétrique est perturbée par des parasites générés par le passage des balais d'une lame de cuivre à l'autre sur le collecteur de la génératrice. Un filtre pouvant atténuer ces perturbations est donc installé en aval du capteur de vitesse. Le collecteur de la génératrice possède 14 lames (ce qui crée 14 perturbations par tour de génératrice). Son arbre tourne à une vitesse maximale de 5836 tr/min, ce qui correspondrait à une vitesse de roues de 6 km/h. On note f la fréquence de coupure du filtre en amont du CAN et f la fréquence fondamentale des parasites générés par le collecteur. 15. Déterminer la fréquence fondamentale des parasites f. Le filtre utilisé ne doit pas avoir une fréquence trop petite car il risque de filtrer le comportement mécanique du système. C est pourquoi on se fixe deux conditions à respecter : - L atténuation pour les fréquences inférieures à 0.1f doit être inférieure à 3dB. - On veut de plus que l atténuation pour les fréquences supérieures à f soit supérieure à 30dB. On choisit dans un premier temps un filtre RC de la forme H(p) = Déterminer la valeur de RC permettant de respecter la première condition et déterminer l atténuation obtenue pour f. Conclure sur la pertinence de ce filtre. On utilise un deuxième filtre dont les diagrammes de Bode sont donnés sur la Figure 8. Figure 8 : Diagramme de Bode du filtre étudié 7
8 17. Proposer une fonction de transfert pour ce filtre en donnant ses paramètres caractéristiques. 18. Justifier qu il convient pour respecter les deux conditions. Afin de commander le déplacement de la laveuse, le conducteur utilise la pédale pour gérer la vitesse de consigne imposée au moteur qui est asservi en vitesse comme indiqué sur la Figure 9. Figure 9 : Schéma bloc d'asservissement de vitesse des roues - Avec un réducteur de rapport de réduction : = = ; - Un capteur de vitesse, sous la forme d une génératrice tachymétrique (GT) modélisée par un gain pur = 1 V. rad. s ; - Le moteur tournant à la vitesse ω modélisé par sa fonction de transfert H (p) H m (p) du premier ordre de gain B = 16,7 rad/(s. V) et τ = 2,3 s ; - Un hacheur de fonction de transfert H (p) ; - C (p) la fonction de transfert du correcteur à choisir ; - K un gain d adaptation. On soumet le hacheur à un échelon de V, on obtient la réponse indicielle U présentée à la Figure 10. V U Figure 10 : Réponse indicielle de U m à un échelon de V α Nous supposerons que ( ) est une fonction de transfert de type passe-bas du premier ordre et peut donc se mettre sous la forme ( ) =.. 8
9 19. Déduire de la Figure 10 les valeurs des coefficients et. On prendra pour la suite du problème (sans correcteur) : ( ) =..... Le tracé réel du diagramme de Bode de la fonction de transfert en boucle ouverte ( ( )) est donné sur le Document réponse 2. On définit la Marge de phase ( ) comme la différence entre -180 et la phase réelle pour la pulsation telle que le gain en décibel soit égal de 0 db pour cette pulsation i.e. ( = ) = 0. = ( = ) On définit la Marge de gain comme la différence entre 0dB et le gain réel pour la pulsation telle que la phase soit de -180 pour cette pulsation, i.e. ( = ) = 180. = ( = ) 20. Déterminer sur le Document réponse 2 la marge de phase et la marge de gain du système. 21. Calculer l erreur statique commise sur la vitesse de rotation des roues suite à une consigne en échelon d amplitude de 5 km/h. 9


10 Document réponse 1 Document réponse 2 10
SCIENCES INDUSTRIELLES POUR L INGÉNIEUR. Partie I - Analyse système
 SCIENCES INDUSTRIELLES POUR L INGÉNIEUR COMPORTEMENT DYNAMIQUE D UN VEHICULE AUTO-BALANCÉ DE TYPE SEGWAY Partie I - Analyse système Poignée directionnelle Barre d appui Plate-forme Photographies 1 Le support
SCIENCES INDUSTRIELLES POUR L INGÉNIEUR COMPORTEMENT DYNAMIQUE D UN VEHICULE AUTO-BALANCÉ DE TYPE SEGWAY Partie I - Analyse système Poignée directionnelle Barre d appui Plate-forme Photographies 1 Le support
Automatique Linéaire 1 Travaux Dirigés 1A ISMIN
 Automatique Linéaire 1 Travaux Dirigés Travaux dirigés, Automatique linéaire 1 J.M. Dutertre 2014 TD 1 Introduction, modélisation, outils. Exercice 1.1 : Calcul de la réponse d un 2 nd ordre à une rampe
Automatique Linéaire 1 Travaux Dirigés Travaux dirigés, Automatique linéaire 1 J.M. Dutertre 2014 TD 1 Introduction, modélisation, outils. Exercice 1.1 : Calcul de la réponse d un 2 nd ordre à une rampe
uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»
![uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»](/thumbs/18/800414.jpg "uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»") TopChair S c Première partie Présentation du système Plus d autonomie pour plus de liberté! TopChair S c offre aux personnes à mobilité réduite une nouvelle possibilité de se déplacer sans assistance à
TopChair S c Première partie Présentation du système Plus d autonomie pour plus de liberté! TopChair S c offre aux personnes à mobilité réduite une nouvelle possibilité de se déplacer sans assistance à
Automatique (AU3): Précision. Département GEII, IUT de Brest contact: vincent.choqueuse@univ-brest.fr
: Précision. Département GEII, IUT de Brest contact: vincent.choqueuse@univ-brest.fr") Automatique (AU3): Précision des systèmes bouclés Département GEII, IUT de Brest contact: vincent.choqueuse@univ-brest.fr Plan de la présentation Introduction 2 Écart statique Définition Expression Entrée
Automatique (AU3): Précision des systèmes bouclés Département GEII, IUT de Brest contact: vincent.choqueuse@univ-brest.fr Plan de la présentation Introduction 2 Écart statique Définition Expression Entrée
Concours EPITA 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette BMW K1200S
 Concours EPIT 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette MW K1200S Durée : 2h. Calculatrices autorisées. Présentation du problème Le problème
Concours EPIT 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette MW K1200S Durée : 2h. Calculatrices autorisées. Présentation du problème Le problème
SCIENCES INDUSTRIELLES (S.I.)
") SESSION 2014 PSISI07 EPREUVE SPECIFIQUE - FILIERE PSI " SCIENCES INDUSTRIELLES (S.I.) Durée : 4 heures " N.B. : Le candidat attachera la plus grande importance à la clarté, à la précision et à la concision
SESSION 2014 PSISI07 EPREUVE SPECIFIQUE - FILIERE PSI " SCIENCES INDUSTRIELLES (S.I.) Durée : 4 heures " N.B. : Le candidat attachera la plus grande importance à la clarté, à la précision et à la concision
MOTO ELECTRIQUE. CPGE / Sciences Industrielles pour l Ingénieur TD06_08 Moto électrique DIAGRAMME DES INTER-ACTEURS UTILISATEUR ENVIRONNEMENT HUMAIN
 MOTO ELECTRIQUE MISE EN SITUATION La moto électrique STRADA EVO 1 est fabriquée par une société SUISSE, située à LUGANO. Moyen de transport alternatif, peut-être la solution pour concilier contraintes
MOTO ELECTRIQUE MISE EN SITUATION La moto électrique STRADA EVO 1 est fabriquée par une société SUISSE, située à LUGANO. Moyen de transport alternatif, peut-être la solution pour concilier contraintes
CABLECAM de HYMATOM. Figure 1 : Schéma du système câblecam et détail du moufle vu de dessus.
 CABLECAM de HYMATOM La société Hymatom conçoit et fabrique des systèmes de vidéosurveillance. Le système câblecam (figure 1) est composé d un chariot mobile sur quatre roues posé sur deux câbles porteurs
CABLECAM de HYMATOM La société Hymatom conçoit et fabrique des systèmes de vidéosurveillance. Le système câblecam (figure 1) est composé d un chariot mobile sur quatre roues posé sur deux câbles porteurs
Chapitre 2 Les ondes progressives périodiques
 DERNIÈRE IMPRESSION LE er août 203 à 7:04 Chapitre 2 Les ondes progressives périodiques Table des matières Onde périodique 2 2 Les ondes sinusoïdales 3 3 Les ondes acoustiques 4 3. Les sons audibles.............................
DERNIÈRE IMPRESSION LE er août 203 à 7:04 Chapitre 2 Les ondes progressives périodiques Table des matières Onde périodique 2 2 Les ondes sinusoïdales 3 3 Les ondes acoustiques 4 3. Les sons audibles.............................
Systèmes de transmission
 Systèmes de transmission Conception d une transmission série FABRE Maxime 2012 Introduction La transmission de données désigne le transport de quelque sorte d'information que ce soit, d'un endroit à un
Systèmes de transmission Conception d une transmission série FABRE Maxime 2012 Introduction La transmission de données désigne le transport de quelque sorte d'information que ce soit, d'un endroit à un
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE
 BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE Épreuve de sciences de l ingénieur Session 2013 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un enseignement de spécialité autre
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE Épreuve de sciences de l ingénieur Session 2013 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un enseignement de spécialité autre
TP Modulation Démodulation BPSK
 I- INTRODUCTION : TP Modulation Démodulation BPSK La modulation BPSK est une modulation de phase (Phase Shift Keying = saut discret de phase) par signal numérique binaire (Binary). La phase d une porteuse
I- INTRODUCTION : TP Modulation Démodulation BPSK La modulation BPSK est une modulation de phase (Phase Shift Keying = saut discret de phase) par signal numérique binaire (Binary). La phase d une porteuse
Notions d asservissements et de Régulations
 I. Introduction I. Notions d asservissements et de Régulations Le professeur de Génie Electrique doit faire passer des notions de régulation à travers ses enseignements. Les notions principales qu'il a
I. Introduction I. Notions d asservissements et de Régulations Le professeur de Génie Electrique doit faire passer des notions de régulation à travers ses enseignements. Les notions principales qu'il a
Information. BASES LITTERAIRES Etre capable de répondre à une question du type «la valeur trouvée respecte t-elle le cahier des charges?
 Compétences générales Avoir des piles neuves, ou récentes dans sa machine à calculer. Etre capable de retrouver instantanément une info dans sa machine. Prendre une bouteille d eau. Prendre CNI + convocation.
Compétences générales Avoir des piles neuves, ou récentes dans sa machine à calculer. Etre capable de retrouver instantanément une info dans sa machine. Prendre une bouteille d eau. Prendre CNI + convocation.
TRAVAUX PRATIQUES SCIENTIFIQUES SUR SYSTÈME
 Baccalauréat Professionnel SYSTÈMES ÉLECTRONIQUES NUMÉRIQUES Champ professionnel : Alarme Sécurité Incendie SOUS - EPREUVE E12 TRAVAUX PRATIQUES SCIENTIFIQUES SUR SYSTÈME Durée 3 heures coefficient 2 Note
Baccalauréat Professionnel SYSTÈMES ÉLECTRONIQUES NUMÉRIQUES Champ professionnel : Alarme Sécurité Incendie SOUS - EPREUVE E12 TRAVAUX PRATIQUES SCIENTIFIQUES SUR SYSTÈME Durée 3 heures coefficient 2 Note
Extrait des Exploitations Pédagogiques
 Pédagogiques Module : Compétitivité et créativité CI Première : Compétitivité et créativité CI institutionnel : Développement durable et compétitivité des produits Support : Robot - O : Caractériser les
Pédagogiques Module : Compétitivité et créativité CI Première : Compétitivité et créativité CI institutionnel : Développement durable et compétitivité des produits Support : Robot - O : Caractériser les
2105-2110 mm 1695 mm. 990 mm Porte-à-faux avant. Modèle de cabine / équipage Small, simple / 3. Codage 46804211 46804311 46804511
 CANTER 3S13 2105-2110 mm 1695 mm 990 mm Porte-à-faux avant 3500 3995 4985 Longueur max. de carrosserie** 2500 2800 3400 Empattement 4635 4985 5785 Longueur hors tout Masses/dimensions Modèle 3S13 Modèle
CANTER 3S13 2105-2110 mm 1695 mm 990 mm Porte-à-faux avant 3500 3995 4985 Longueur max. de carrosserie** 2500 2800 3400 Empattement 4635 4985 5785 Longueur hors tout Masses/dimensions Modèle 3S13 Modèle
Manipulation N 6 : La Transposition de fréquence : Mélangeur micro-ondes
 Manipulation N 6 : La Transposition de fréquence : Mélangeur micro-ondes Avant Propos : Le sujet comporte deux parties : une partie théorique, jalonnée de questions (dans les cadres), qui doit être préparée
Manipulation N 6 : La Transposition de fréquence : Mélangeur micro-ondes Avant Propos : Le sujet comporte deux parties : une partie théorique, jalonnée de questions (dans les cadres), qui doit être préparée
NO-BREAK KS. Système UPS dynamique PRÉSENTATION
 NO-BREAK KS Système UPS dynamique PRÉSENTATION Table des matières Chapitre 1 : Description du système No-Break KS...3 Chapitre 2 : Fonctionnement lorsque le réseau est présent...4 Chapitre 3 : Fonctionnement
NO-BREAK KS Système UPS dynamique PRÉSENTATION Table des matières Chapitre 1 : Description du système No-Break KS...3 Chapitre 2 : Fonctionnement lorsque le réseau est présent...4 Chapitre 3 : Fonctionnement
Etude du SIMULATEUR DE VOL «FLY-HO»
 ECOLE NATIONALE DE L AVIATION CIVILE Session 212 CONCOURS DE RECRUTEMENT D ELEVES INGENIEURS DU CONTROLE DE LA NAVIGATION AERIENNE Epreuve optionnelle obligatoire de SCIENCES INDUSTRIELLES POUR L INGENIEUR
ECOLE NATIONALE DE L AVIATION CIVILE Session 212 CONCOURS DE RECRUTEMENT D ELEVES INGENIEURS DU CONTROLE DE LA NAVIGATION AERIENNE Epreuve optionnelle obligatoire de SCIENCES INDUSTRIELLES POUR L INGENIEUR
!-.!#- $'( 1&) &) (,' &*- %,!
 &) (,' &*- %,!") 0 $'( 1&) +&&/ ( &+&& &+&))&( -.#- 2& -.#- &) (,' %&,))& &)+&&) &- $ 3.#( %, (&&/ 0 ' Il existe plusieurs types de simulation de flux Statique ou dynamique Stochastique ou déterministe A événements discrets
0 $'( 1&) +&&/ ( &+&& &+&))&( -.#- 2& -.#- &) (,' %&,))& &)+&&) &- $ 3.#( %, (&&/ 0 ' Il existe plusieurs types de simulation de flux Statique ou dynamique Stochastique ou déterministe A événements discrets
LES CARACTERISTIQUES DES SUPPORTS DE TRANSMISSION
 LES CARACTERISTIQUES DES SUPPORTS DE TRANSMISSION LES CARACTERISTIQUES DES SUPPORTS DE TRANSMISSION ) Caractéristiques techniques des supports. L infrastructure d un réseau, la qualité de service offerte,
LES CARACTERISTIQUES DES SUPPORTS DE TRANSMISSION LES CARACTERISTIQUES DES SUPPORTS DE TRANSMISSION ) Caractéristiques techniques des supports. L infrastructure d un réseau, la qualité de service offerte,
Caractéristiques des ondes
 Caractéristiques des ondes Chapitre Activités 1 Ondes progressives à une dimension (p 38) A Analyse qualitative d une onde b Fin de la Début de la 1 L onde est progressive puisque la perturbation se déplace
Caractéristiques des ondes Chapitre Activités 1 Ondes progressives à une dimension (p 38) A Analyse qualitative d une onde b Fin de la Début de la 1 L onde est progressive puisque la perturbation se déplace
INTRODUCTION. A- Modélisation et paramétrage : CHAPITRE I : MODÉLISATION. I. Paramétrage de la position d un solide : (S1) O O1 X
 O O1 X") INTRODUCTION La conception d'un mécanisme en vue de sa réalisation industrielle comporte plusieurs étapes. Avant d'aboutir à la maquette numérique du produit définitif, il est nécessaire d'effectuer une
INTRODUCTION La conception d'un mécanisme en vue de sa réalisation industrielle comporte plusieurs étapes. Avant d'aboutir à la maquette numérique du produit définitif, il est nécessaire d'effectuer une
SEO 200. Banc d étude du positionnement angulaire d une éolienne face au vent DESCRIPTIF APPLICATIONS PEDAGOGIQUES
 Banc d étude du positionnement angulaire d une éolienne face au vent DESCRIPTIF Le banc SEO 200 permet d étudier et de paramétrer les boucles d asservissement de vitesse et position d une nacelle d éolienne
Banc d étude du positionnement angulaire d une éolienne face au vent DESCRIPTIF Le banc SEO 200 permet d étudier et de paramétrer les boucles d asservissement de vitesse et position d une nacelle d éolienne
Equipement d un forage d eau potable
 Equipement d un d eau potable Mise en situation La Société des Sources de Soultzmatt est une Société d Economie Mixte (SEM) dont l activité est l extraction et l embouteillage d eau de source en vue de
Equipement d un d eau potable Mise en situation La Société des Sources de Soultzmatt est une Société d Economie Mixte (SEM) dont l activité est l extraction et l embouteillage d eau de source en vue de
Oscillations libres des systèmes à deux degrés de liberté
 Chapitre 4 Oscillations libres des systèmes à deux degrés de liberté 4.1 Introduction Les systèmes qui nécessitent deux coordonnées indépendantes pour spécifier leurs positions sont appelés systèmes à
Chapitre 4 Oscillations libres des systèmes à deux degrés de liberté 4.1 Introduction Les systèmes qui nécessitent deux coordonnées indépendantes pour spécifier leurs positions sont appelés systèmes à
BACCALAURÉAT TECHNOLOGIQUE SESSION 2008 POSITIONNEUR DE PANNEAU SOLAIRE POUR CAMPING-CAR
 BACCALAURÉAT TECHNOLOGIQUE SÉRIE SCIENCES ET TECHNIQUES INDUSTRIELLES GÉNIE ÉLECTROTECHNIQUE SESSION 2008 ÉPREUVE: ÉTUDE DES CONSTRUCTIONS Durée: 4 heures Coefficient : 6 POSITIONNEUR DE PANNEAU SOLAIRE
BACCALAURÉAT TECHNOLOGIQUE SÉRIE SCIENCES ET TECHNIQUES INDUSTRIELLES GÉNIE ÉLECTROTECHNIQUE SESSION 2008 ÉPREUVE: ÉTUDE DES CONSTRUCTIONS Durée: 4 heures Coefficient : 6 POSITIONNEUR DE PANNEAU SOLAIRE
CONCOURS COMMUNS POLYTECHNIQUES
 CONCOURS COMMUNS POLYTECHNIQUES SYSTÈME DE LEVAGE À MULTIPLES COLONNES Les sociétés de transports publics des grandes agglomérations gèrent des réseaux comportant des bus et/ou des tramways. Ces sociétés
CONCOURS COMMUNS POLYTECHNIQUES SYSTÈME DE LEVAGE À MULTIPLES COLONNES Les sociétés de transports publics des grandes agglomérations gèrent des réseaux comportant des bus et/ou des tramways. Ces sociétés
Filtres passe-bas. On utilise les filtres passe-bas pour réduire l amplitude des composantes de fréquences supérieures à la celle de la coupure.
 Filtres passe-bas Ce court document expose les principes des filtres passe-bas, leurs caractéristiques en fréquence et leurs principales topologies. Les éléments de contenu sont : Définition du filtre
Filtres passe-bas Ce court document expose les principes des filtres passe-bas, leurs caractéristiques en fréquence et leurs principales topologies. Les éléments de contenu sont : Définition du filtre
P.L.U. Plan Local d'urbanisme PRESCRIPTION D'ISOLEMENT ACOUSTIQUE AU VOISINAGE DES INFRASTRUCTURES TERRESTRES DOCUMENT OPPOSABLE
 Commune du Département de l'oise P.L.U Plan Local d'urbanisme PRESCRIPTION D'ISOLEMENT ACOUSTIQUE AU VOISINAGE DES INFRASTRUCTURES TERRESTRES DOCUMENT OPPOSABLE Document Établi le 20 septembre 2013 Le
Commune du Département de l'oise P.L.U Plan Local d'urbanisme PRESCRIPTION D'ISOLEMENT ACOUSTIQUE AU VOISINAGE DES INFRASTRUCTURES TERRESTRES DOCUMENT OPPOSABLE Document Établi le 20 septembre 2013 Le
Chapitre 2 : Caractéristiques du mouvement d un solide
 Chapitre 2 : Caractéristiques du mouvement d un solide I Rappels : Référentiel : Le mouvement d un corps est décris par rapport à un corps de référence et dépend du choix de ce corps. Ce corps de référence
Chapitre 2 : Caractéristiques du mouvement d un solide I Rappels : Référentiel : Le mouvement d un corps est décris par rapport à un corps de référence et dépend du choix de ce corps. Ce corps de référence
Contrôle de l utilisation de l énergie électrique Maison 8 pièces, chauffage électrique
 Contrôle de l utilisation de l énergie électrique Maison 8 pièces, chauffage électrique Après l isolation de la maison, l ECS solaire, la production photovoltaïque, la ventilation double flux, le split
Contrôle de l utilisation de l énergie électrique Maison 8 pièces, chauffage électrique Après l isolation de la maison, l ECS solaire, la production photovoltaïque, la ventilation double flux, le split
Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant
 Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant I Présentation I.1 La roue autonome Ez-Wheel SAS est une entreprise française de technologie innovante fondée en 2009.
Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant I Présentation I.1 La roue autonome Ez-Wheel SAS est une entreprise française de technologie innovante fondée en 2009.
Analyse des Systèmes Asservis
 Analyse des Systèmes Asservis Après quelques rappels, nous verrons comment évaluer deux des caractéristiques principales d'un système asservi : Stabilité et Précision. Si ces caractéristiques ne sont pas
Analyse des Systèmes Asservis Après quelques rappels, nous verrons comment évaluer deux des caractéristiques principales d'un système asservi : Stabilité et Précision. Si ces caractéristiques ne sont pas
PRECISION - REJET DE PERTURBATIONS T.D. G.E.I.I.
 PRECISION - REJET DE PERTURBATIONS T.D. G.E.I.I.. Donner les erreurs en position, en vitesse et en accélération d un système de transfert F BO = N(p) D(p) (transfert en boucle ouverte) bouclé par retour
PRECISION - REJET DE PERTURBATIONS T.D. G.E.I.I.. Donner les erreurs en position, en vitesse et en accélération d un système de transfert F BO = N(p) D(p) (transfert en boucle ouverte) bouclé par retour
Etude des convertisseurs statiques continu-continu à résonance, modélisation dynamique
 Etude des convertisseurs statiques continucontinu à résonance, modélisation dynamique J.P. Ferrieux, J. Perard, E. Olivier To cite this version: J.P. Ferrieux, J. Perard, E. Olivier. Etude des convertisseurs
Etude des convertisseurs statiques continucontinu à résonance, modélisation dynamique J.P. Ferrieux, J. Perard, E. Olivier To cite this version: J.P. Ferrieux, J. Perard, E. Olivier. Etude des convertisseurs
1. PRESENTATION DU PROJET
 Bac STI2D Formation des enseignants Jean-François LIEBAUT Denis PENARD SIN 63 : Prototypage d un traitement de l information analogique et numérique (PSoC) 1. PRESENTATION DU PROJET Les systèmes d éclairage
Bac STI2D Formation des enseignants Jean-François LIEBAUT Denis PENARD SIN 63 : Prototypage d un traitement de l information analogique et numérique (PSoC) 1. PRESENTATION DU PROJET Les systèmes d éclairage
DimNet Gradateurs Numériques Evolués Compulite. CompuDim 2000
 DimNet Gradateurs Numériques Evolués Compulite La gamme des gradateurs Compulite est conçue autour des technologies les plus récentes et les plus évoluées que ces 20 dernières années ont vu apparaître.
DimNet Gradateurs Numériques Evolués Compulite La gamme des gradateurs Compulite est conçue autour des technologies les plus récentes et les plus évoluées que ces 20 dernières années ont vu apparaître.
Automatique Linéaire 1 1A ISMIN
 Automatique linéaire 1 J.M. Dutertre 2014 Sommaire. I. Introduction, définitions, position du problème. p. 3 I.1. Introduction. p. 3 I.2. Définitions. p. 5 I.3. Position du problème. p. 6 II. Modélisation
Automatique linéaire 1 J.M. Dutertre 2014 Sommaire. I. Introduction, définitions, position du problème. p. 3 I.1. Introduction. p. 3 I.2. Définitions. p. 5 I.3. Position du problème. p. 6 II. Modélisation
Equipement. électronique
 MASTER ISIC Les générateurs de fonctions 1 1. Avant-propos C est avec l oscilloscope, le multimètre et l alimentation stabilisée, l appareil le plus répandu en laboratoire. BUT: Fournir des signau électriques
MASTER ISIC Les générateurs de fonctions 1 1. Avant-propos C est avec l oscilloscope, le multimètre et l alimentation stabilisée, l appareil le plus répandu en laboratoire. BUT: Fournir des signau électriques
véhicule hybride (première
 La motorisation d un véhicule hybride (première HERVÉ DISCOURS [1] La cherté et la raréfaction du pétrole ainsi que la sensibilisation du public à l impact de son exploitation sur l environnement conduisent
La motorisation d un véhicule hybride (première HERVÉ DISCOURS [1] La cherté et la raréfaction du pétrole ainsi que la sensibilisation du public à l impact de son exploitation sur l environnement conduisent
A. N(p) B + C p. + D p2
 B + C p. + D p2") Polytech Nice ELEC3 T.P. d'electronique TP N 7 S ACTIFS DU SECOND ORDRE 1 - INTRODUCTION Un quadripôle est dit avoir une fonction de transfert en tension, du second ordre, lorsque le rapport tension de
Polytech Nice ELEC3 T.P. d'electronique TP N 7 S ACTIFS DU SECOND ORDRE 1 - INTRODUCTION Un quadripôle est dit avoir une fonction de transfert en tension, du second ordre, lorsque le rapport tension de
(Exemple ici de calcul pour une Ducati 748 biposto, et également pour un S2R1000, équipé d un disque acier en fond de cloche, et ressorts d origine)
") Analyse de la charge transmise aux roulements de la roue dentée, notamment en rajoutant les efforts axiaux dus aux ressorts de l embrayage (via la cloche) (Exemple ici de calcul pour une Ducati 748 biposto,
Analyse de la charge transmise aux roulements de la roue dentée, notamment en rajoutant les efforts axiaux dus aux ressorts de l embrayage (via la cloche) (Exemple ici de calcul pour une Ducati 748 biposto,
Circuits RL et RC. Chapitre 5. 5.1 Inductance
 Chapitre 5 Circuits RL et RC Ce chapitre présente les deux autres éléments linéaires des circuits électriques : l inductance et la capacitance. On verra le comportement de ces deux éléments, et ensuite
Chapitre 5 Circuits RL et RC Ce chapitre présente les deux autres éléments linéaires des circuits électriques : l inductance et la capacitance. On verra le comportement de ces deux éléments, et ensuite
Goodyear Les pneumatiques longue distance qui font économiser du carburant
 Goodyear Les pneumatiques longue distance qui font économiser du carburant Marathon LHS II + Marathon LHD II + Marathon LHT II Goodyear Marathon LHS II + Directeur Le Marathon LHS II + possède un mélange
Goodyear Les pneumatiques longue distance qui font économiser du carburant Marathon LHS II + Marathon LHD II + Marathon LHT II Goodyear Marathon LHS II + Directeur Le Marathon LHS II + possède un mélange
Erreur statique. Chapitre 6. 6.1 Définition
 Chapitre 6 Erreur statique On considère ici le troisième paramètre de design, soit l erreur statique. L erreur statique est la différence entre l entrée et la sortie d un système lorsque t pour une entrée
Chapitre 6 Erreur statique On considère ici le troisième paramètre de design, soit l erreur statique. L erreur statique est la différence entre l entrée et la sortie d un système lorsque t pour une entrée
BACCALAURÉAT PROFESSIONNEL EPREUVE DE TRAVAUX PRATIQUES DE SCIENCES PHYSIQUES SUJET A.1
 TP A.1 Page 1/5 BACCALAURÉAT PROFESSIONNEL EPREUVE DE TRAVAUX PRATIQUES DE SCIENCES PHYSIQUES SUJET A.1 Ce document comprend : - une fiche descriptive du sujet destinée à l examinateur : Page 2/5 - une
TP A.1 Page 1/5 BACCALAURÉAT PROFESSIONNEL EPREUVE DE TRAVAUX PRATIQUES DE SCIENCES PHYSIQUES SUJET A.1 Ce document comprend : - une fiche descriptive du sujet destinée à l examinateur : Page 2/5 - une
LA PUISSANCE DES MOTEURS. Avez-vous déjà feuilleté le catalogue d un grand constructeur automobile?
 LA PUISSANCE DES MOTEURS Avez-vous déjà feuilleté le catalogue d un grand constructeur automobile? Chaque modèle y est décliné en plusieurs versions, les différences portant essentiellement sur la puissance
LA PUISSANCE DES MOTEURS Avez-vous déjà feuilleté le catalogue d un grand constructeur automobile? Chaque modèle y est décliné en plusieurs versions, les différences portant essentiellement sur la puissance
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE
 BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR ÉPREUVE DU VENDREDI 20 JUIN 2014 Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR ÉPREUVE DU VENDREDI 20 JUIN 2014 Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un
Donner les limites de validité de la relation obtenue.
 olutions! ours! - Multiplicateur 0 e s alculer en fonction de. Donner les limites de validité de la relation obtenue. Quelle est la valeur supérieure de? Quel est le rôle de 0? - Multiplicateur e 0 s alculer
olutions! ours! - Multiplicateur 0 e s alculer en fonction de. Donner les limites de validité de la relation obtenue. Quelle est la valeur supérieure de? Quel est le rôle de 0? - Multiplicateur e 0 s alculer
Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive. Version 1.0
 Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive Sommaire - Le Robot M.I.M.I. (Multipode Intelligent à Mobilité Interactive) - Présentation du Système à Enseigner. - Composition
Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive Sommaire - Le Robot M.I.M.I. (Multipode Intelligent à Mobilité Interactive) - Présentation du Système à Enseigner. - Composition
La solution éco performante pour la sécurisation de l alimentation électrique des Datacenters à haut niveau de disponibilité
 La solution éco performante pour la sécurisation de l alimentation électrique des Datacenters à haut niveau de disponibilité Alimentation Sans Interruption en liaison avec : Les échanges et besoins en
La solution éco performante pour la sécurisation de l alimentation électrique des Datacenters à haut niveau de disponibilité Alimentation Sans Interruption en liaison avec : Les échanges et besoins en
Module : systèmes asservis linéaires
 BS2EL - Physique appliquée Module : systèmes asservis linéaires Diaporamas : les asservissements Résumé de cours 1- Structure d un système asservi 2- Transmittances en boucle ouverte et ermée 3- Stabilité
BS2EL - Physique appliquée Module : systèmes asservis linéaires Diaporamas : les asservissements Résumé de cours 1- Structure d un système asservi 2- Transmittances en boucle ouverte et ermée 3- Stabilité
WWW.ELCON.SE Multichronomètre SA10 Présentation générale
 WWW.ELCON.SE Multichronomètre SA10 Présentation générale Le SA10 est un appareil portable destiné au test des disjoncteurs moyenne tension et haute tension. Quoiqu il soit conçu pour fonctionner couplé
WWW.ELCON.SE Multichronomètre SA10 Présentation générale Le SA10 est un appareil portable destiné au test des disjoncteurs moyenne tension et haute tension. Quoiqu il soit conçu pour fonctionner couplé
Vélo électrique YAMAHA PAS XPC 26 Dossier technique
 Vélo électrique YAMAHA PAS XPC 26 Dossier technique DT Velo YAMAHA.doc Page 1 sur 8 Sommaire 1 LE PRODUIT... 3 2 ANALYSE FONCTIONNELLE PARTIELLE DU VELO YAMAHA XPC26... 4 2.1 RAISON D ETRE DU VELO ELECTRIQUE...
Vélo électrique YAMAHA PAS XPC 26 Dossier technique DT Velo YAMAHA.doc Page 1 sur 8 Sommaire 1 LE PRODUIT... 3 2 ANALYSE FONCTIONNELLE PARTIELLE DU VELO YAMAHA XPC26... 4 2.1 RAISON D ETRE DU VELO ELECTRIQUE...
SYSTEMES LINEAIRES DU PREMIER ORDRE
 SYSTEMES LINEIRES DU PREMIER ORDRE 1. DEFINITION e(t) SYSTEME s(t) Un système est dit linéaire invariant du premier ordre si la réponse s(t) est liée à l excitation e(t) par une équation différentielle
SYSTEMES LINEIRES DU PREMIER ORDRE 1. DEFINITION e(t) SYSTEME s(t) Un système est dit linéaire invariant du premier ordre si la réponse s(t) est liée à l excitation e(t) par une équation différentielle
T2- COMMENT PASSER DE LA VITESSE DES ROUES A CELLE DE LA VOITURE? L E T U N I N G
 T2- COMMENT PASSER DE LA VITESSE DES ROUES A CELLE DE LA VOITURE? D É M A R C H E D I N V E S T I G A T I O N : L E T U N I N G Programme de seconde professionnelle Situation introductive problématique
T2- COMMENT PASSER DE LA VITESSE DES ROUES A CELLE DE LA VOITURE? D É M A R C H E D I N V E S T I G A T I O N : L E T U N I N G Programme de seconde professionnelle Situation introductive problématique
Premier ordre Expression de la fonction de transfert : H(p) = K
 = K") Premier ordre Expression de la fonction de transfert : H(p) = K + τ.p. K.e τ K.e /τ τ 86% 95% 63% 5% τ τ 3τ 4τ 5τ Temps Caractéristiques remarquables de la réponse à un échelon e(t) = e.u(t). La valeur
Premier ordre Expression de la fonction de transfert : H(p) = K + τ.p. K.e τ K.e /τ τ 86% 95% 63% 5% τ τ 3τ 4τ 5τ Temps Caractéristiques remarquables de la réponse à un échelon e(t) = e.u(t). La valeur
Modules d automatismes simples
 Modules d automatismes simples Solutions pour automatiser Modules d'automatismes Enfin, vraiment simple! Un concentré de solution Pour vos petites applications d'automatismes millenium gère : Temporisations
Modules d automatismes simples Solutions pour automatiser Modules d'automatismes Enfin, vraiment simple! Un concentré de solution Pour vos petites applications d'automatismes millenium gère : Temporisations
TD1 Signaux, énergie et puissance, signaux aléatoires
 TD1 Signaux, énergie et puissance, signaux aléatoires I ) Ecrire l'expression analytique des signaux représentés sur les figures suivantes à l'aide de signaux particuliers. Dans le cas du signal y(t) trouver
TD1 Signaux, énergie et puissance, signaux aléatoires I ) Ecrire l'expression analytique des signaux représentés sur les figures suivantes à l'aide de signaux particuliers. Dans le cas du signal y(t) trouver
Figure 1 : représentation des différents écarts
 ulletin officiel spécial n 9 du 30 septembre 2010 Annexe SIENES DE L INGÉNIEUR YLE TERMINAL DE LA SÉRIE SIENTIFIQUE I - Objectifs généraux Notre société devra relever de nombreux défis dans les prochaines
ulletin officiel spécial n 9 du 30 septembre 2010 Annexe SIENES DE L INGÉNIEUR YLE TERMINAL DE LA SÉRIE SIENTIFIQUE I - Objectifs généraux Notre société devra relever de nombreux défis dans les prochaines
M1107 : Initiation à la mesure du signal. T_MesSig
 1/81 M1107 : Initiation à la mesure du signal T_MesSig Frédéric PAYAN IUT Nice Côte d Azur - Département R&T Université de Nice Sophia Antipolis frederic.payan@unice.fr 15 octobre 2014 2/81 Curriculum
1/81 M1107 : Initiation à la mesure du signal T_MesSig Frédéric PAYAN IUT Nice Côte d Azur - Département R&T Université de Nice Sophia Antipolis frederic.payan@unice.fr 15 octobre 2014 2/81 Curriculum
DOSSIER TECHNIQUE R-GO SPA. Production et assemblage 100 % Française. 3 Rue Pierre Mendès France 61200 ARGENTAN
 DOSSIER TECHNIQUE R-GO SPA R-GO SPA Production et assemblage 100 % Française 1 Implantation technique Il faut retenir que la partie technique a un encombrement total de 250 cm par 90 cm au minimum, et
DOSSIER TECHNIQUE R-GO SPA R-GO SPA Production et assemblage 100 % Française 1 Implantation technique Il faut retenir que la partie technique a un encombrement total de 250 cm par 90 cm au minimum, et
EXPRIMEZ-VOUS LORS DU CHOIX DE VOS PNEUS : EXIGEZ DES PNEUS SÛRS, ÉNERGÉTIQUEMENT EFFICACES ET SILENCIEUX! WWW.ETIQUETTE-PNEUS.CH
 EXPRIMEZ-VOUS LORS DU CHOIX DE VOS PNEUS : EXIGEZ DES PNEUS SÛRS, ÉNERGÉTIQUEMENT EFFICACES ET SILENCIEUX! POUR DE MEILLEURS PNEUS SUR LES ROUTES SUISSES S exprimer lors du choix des pneus? Donner son
EXPRIMEZ-VOUS LORS DU CHOIX DE VOS PNEUS : EXIGEZ DES PNEUS SÛRS, ÉNERGÉTIQUEMENT EFFICACES ET SILENCIEUX! POUR DE MEILLEURS PNEUS SUR LES ROUTES SUISSES S exprimer lors du choix des pneus? Donner son
DISQUE DUR. Figure 1 Disque dur ouvert
 DISQUE DUR Le sujet est composé de 8 pages et d une feuille format A3 de dessins de détails, la réponse à toutes les questions sera rédigée sur les feuilles de réponses jointes au sujet. Toutes les questions
DISQUE DUR Le sujet est composé de 8 pages et d une feuille format A3 de dessins de détails, la réponse à toutes les questions sera rédigée sur les feuilles de réponses jointes au sujet. Toutes les questions
FORD C-MAX + FORD GRAND C-MAX CMAX_Main_Cover_2013_V3.indd 1-3 22/08/2012 15:12
 1 2 3 4 5 6 7 8 9 10 12,999,976 km 9,136,765 km 1,276,765 km 499,892 km 245,066 km 112,907 km 36,765 km 24,159 km 7899 km 2408 km 76 km 12 14 16 1 12 7 3 1 6 2 5 4 3 11 9 10 8 18 20 21 22 23 24 26 28 30
1 2 3 4 5 6 7 8 9 10 12,999,976 km 9,136,765 km 1,276,765 km 499,892 km 245,066 km 112,907 km 36,765 km 24,159 km 7899 km 2408 km 76 km 12 14 16 1 12 7 3 1 6 2 5 4 3 11 9 10 8 18 20 21 22 23 24 26 28 30
document proposé sur le site «Sciences Physiques en BTS» : http://nicole.cortial.net BTS AVA 2015
 BT V 2015 (envoyé par Frédéric COTTI - Professeur d Electrotechnique au Lycée Régional La Floride Marseille) Document 1 - Etiquette énergie Partie 1 : Voiture à faible consommation - Une étiquette pour
BT V 2015 (envoyé par Frédéric COTTI - Professeur d Electrotechnique au Lycée Régional La Floride Marseille) Document 1 - Etiquette énergie Partie 1 : Voiture à faible consommation - Une étiquette pour
Transmission de données. A) Principaux éléments intervenant dans la transmission
 Principaux éléments intervenant dans la transmission") Page 1 / 7 A) Principaux éléments intervenant dans la transmission A.1 Equipement voisins Ordinateur ou terminal Ordinateur ou terminal Canal de transmission ETTD ETTD ETTD : Equipement Terminal de Traitement
Page 1 / 7 A) Principaux éléments intervenant dans la transmission A.1 Equipement voisins Ordinateur ou terminal Ordinateur ou terminal Canal de transmission ETTD ETTD ETTD : Equipement Terminal de Traitement
Mesures d antennes en TNT
 Mesures d antennes en TNT Ce TP s intéresse aux techniques liées à l installation d un équipement de réception de télévision numérique terrestre. Pour les aspects théoriques, on pourra utilement se référer
Mesures d antennes en TNT Ce TP s intéresse aux techniques liées à l installation d un équipement de réception de télévision numérique terrestre. Pour les aspects théoriques, on pourra utilement se référer
10 leçon 2. Leçon n 2 : Contact entre deux solides. Frottement de glissement. Exemples. (PC ou 1 er CU)
") 0 leçon 2 Leçon n 2 : Contact entre deu solides Frottement de glissement Eemples (PC ou er CU) Introduction Contact entre deu solides Liaisons de contact 2 Contact ponctuel 2 Frottement de glissement 2
0 leçon 2 Leçon n 2 : Contact entre deu solides Frottement de glissement Eemples (PC ou er CU) Introduction Contact entre deu solides Liaisons de contact 2 Contact ponctuel 2 Frottement de glissement 2
Rapport final d'enquête partiel fourni ultérieurement. le Service d'enquête sur les accidents des transports publics
 Unfalluntersuchungsstelle Bahnen und Schiffe UUS Service d enquête sur les accidents des transports publics SEA Servizio d inchiesta sugli infortuni dei trasporti pubblici SII Investigation bureau for
Unfalluntersuchungsstelle Bahnen und Schiffe UUS Service d enquête sur les accidents des transports publics SEA Servizio d inchiesta sugli infortuni dei trasporti pubblici SII Investigation bureau for
Intérêt du découpage en sous-bandes pour l analyse spectrale
 Intérêt du découpage en sous-bandes pour l analyse spectrale David BONACCI Institut National Polytechnique de Toulouse (INP) École Nationale Supérieure d Électrotechnique, d Électronique, d Informatique,
Intérêt du découpage en sous-bandes pour l analyse spectrale David BONACCI Institut National Polytechnique de Toulouse (INP) École Nationale Supérieure d Électrotechnique, d Électronique, d Informatique,
ETUDE D IMPACT ACOUSTIQUE
 ETUDE D IMPACT ACOUSTIQUE PROJET D AMÉNAGEMENT D UN CENTRE DE STOCKAGE DE SEDIMENTS Commune de Bessines-sur-Gartempe Maître d Ouvrage AREVA Etablissement de Bessines 1, Avenue du Brugeaud 87250 Bessines
ETUDE D IMPACT ACOUSTIQUE PROJET D AMÉNAGEMENT D UN CENTRE DE STOCKAGE DE SEDIMENTS Commune de Bessines-sur-Gartempe Maître d Ouvrage AREVA Etablissement de Bessines 1, Avenue du Brugeaud 87250 Bessines
BIEN CHOISIR VOTRE SYSTEME DE GUIDAGE PAR SATELLITES
 BIEN CHOISIR VOTRE SYSTEME DE GUIDAGE PAR SATELLITES Le guidage par GPS est un outil qui trouve maintenant sa place dans les structures de type polyculture-élevage. Avec des prix de plus en plus abordables,
BIEN CHOISIR VOTRE SYSTEME DE GUIDAGE PAR SATELLITES Le guidage par GPS est un outil qui trouve maintenant sa place dans les structures de type polyculture-élevage. Avec des prix de plus en plus abordables,
I- Définitions des signaux.
 101011011100 010110101010 101110101101 100101010101 Du compact-disc, au DVD, en passant par l appareil photo numérique, le scanner, et télévision numérique, le numérique a fait une entrée progressive mais
101011011100 010110101010 101110101101 100101010101 Du compact-disc, au DVD, en passant par l appareil photo numérique, le scanner, et télévision numérique, le numérique a fait une entrée progressive mais
INTRODUCTION A L ELECTRONIQUE NUMERIQUE ECHANTILLONNAGE ET QUANTIFICATION I. ARCHITECTURE DE L ELECRONIQUE NUMERIQUE
 INTRODUCTION A L ELECTRONIQUE NUMERIQUE ECHANTILLONNAGE ET QUANTIFICATION I. ARCHITECTURE DE L ELECRONIQUE NUMERIQUE Le schéma synoptique ci-dessous décrit les différentes étapes du traitement numérique
INTRODUCTION A L ELECTRONIQUE NUMERIQUE ECHANTILLONNAGE ET QUANTIFICATION I. ARCHITECTURE DE L ELECRONIQUE NUMERIQUE Le schéma synoptique ci-dessous décrit les différentes étapes du traitement numérique
LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE
 LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE 2. L EFFET GYROSCOPIQUE Les lois physiques qui régissent le mouvement des véhicules terrestres sont des lois universelles qui s appliquent
LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE 2. L EFFET GYROSCOPIQUE Les lois physiques qui régissent le mouvement des véhicules terrestres sont des lois universelles qui s appliquent
Atelier A : Polyprod. APO03 : Changement de format. APO03 : Changement de format Page 1
 Atelier A : Polyprod APO03 : Changement de format APO03 : Changement de format Page 1 Buts de l exercice : La ligne ermaflex est prévue pour travailler avec plusieurs types de contenants différents. La
Atelier A : Polyprod APO03 : Changement de format APO03 : Changement de format Page 1 Buts de l exercice : La ligne ermaflex est prévue pour travailler avec plusieurs types de contenants différents. La
En recherche, simuler des expériences : Trop coûteuses Trop dangereuses Trop longues Impossibles
 Intérêt de la simulation En recherche, simuler des expériences : Trop coûteuses Trop dangereuses Trop longues Impossibles En développement : Aide à la prise de décision Comparer des solutions Optimiser
Intérêt de la simulation En recherche, simuler des expériences : Trop coûteuses Trop dangereuses Trop longues Impossibles En développement : Aide à la prise de décision Comparer des solutions Optimiser
OTIS. Mod. La modernisation réinventée. Plus de sécurité Plus de fiabilité Plus de confort. Et plus d attention à l environnement.
 OTIS Mod La modernisation réinventée Plus de sécurité Plus de fiabilité Plus de confort Et plus d attention à l environnement. GeN2 Mod, un concept novateur. ➍ CÂBLE TRADITIONNEL EN ACIER ➌ ➋ ➌ ➌ POULIE
OTIS Mod La modernisation réinventée Plus de sécurité Plus de fiabilité Plus de confort Et plus d attention à l environnement. GeN2 Mod, un concept novateur. ➍ CÂBLE TRADITIONNEL EN ACIER ➌ ➋ ➌ ➌ POULIE
Ecole Centrale d Electronique VA «Réseaux haut débit et multimédia» Novembre 2009
 Ecole Centrale d Electronique VA «Réseaux haut débit et multimédia» Novembre 2009 1 Les fibres optiques : caractéristiques et fabrication 2 Les composants optoélectroniques 3 Les amplificateurs optiques
Ecole Centrale d Electronique VA «Réseaux haut débit et multimédia» Novembre 2009 1 Les fibres optiques : caractéristiques et fabrication 2 Les composants optoélectroniques 3 Les amplificateurs optiques
Notions de base sur l énergie solaire photovoltaïque
 I- Présentation Notions de base sur l énergie solaire photovoltaïque L énergie solaire photovoltaïque est une forme d énergie renouvelable. Elle permet de produire de l électricité par transformation d
I- Présentation Notions de base sur l énergie solaire photovoltaïque L énergie solaire photovoltaïque est une forme d énergie renouvelable. Elle permet de produire de l électricité par transformation d
Mathématiques et petites voitures
 Mathématiques et petites voitures Thomas Lefebvre 10 avril 2015 Résumé Ce document présente diérentes applications des mathématiques dans le domaine du slot-racing. Table des matières 1 Périmètre et circuit
Mathématiques et petites voitures Thomas Lefebvre 10 avril 2015 Résumé Ce document présente diérentes applications des mathématiques dans le domaine du slot-racing. Table des matières 1 Périmètre et circuit
ANALYSE SPECTRALE. monochromateur
 ht ANALYSE SPECTRALE Une espèce chimique est susceptible d interagir avec un rayonnement électromagnétique. L étude de l intensité du rayonnement (absorbé ou réémis) en fonction des longueurs d ode s appelle
ht ANALYSE SPECTRALE Une espèce chimique est susceptible d interagir avec un rayonnement électromagnétique. L étude de l intensité du rayonnement (absorbé ou réémis) en fonction des longueurs d ode s appelle
ACOUSTIQUE 3 : ACOUSTIQUE MUSICALE ET PHYSIQUE DES SONS
 Matériel : Logiciel winoscillo Logiciel synchronie Microphone Amplificateur Alimentation -15 +15 V (1) (2) (3) (4) (5) (6) ACOUSTIQUE 3 : ACOUSTIQUE MUSICALE ET PHYSIQUE DES SONS Connaissances et savoir-faire
Matériel : Logiciel winoscillo Logiciel synchronie Microphone Amplificateur Alimentation -15 +15 V (1) (2) (3) (4) (5) (6) ACOUSTIQUE 3 : ACOUSTIQUE MUSICALE ET PHYSIQUE DES SONS Connaissances et savoir-faire
1995.- Véhicule électrique HS-559 27203. 2850.- Véhicule électrique HS-898 27204. Liberté et qualité de vie. Prix bas permanents. www.landi.
 Mobil www.landi.ch Liberté et qualité de vie Garantie 3 ans Batterie 1 année 1995.- Véhicule électrique HS-559 27203 2850.- Véhicule électrique HS-898 27204 Bienvenue chez LANDI. Qualité LANDI Chez LANDI
Mobil www.landi.ch Liberté et qualité de vie Garantie 3 ans Batterie 1 année 1995.- Véhicule électrique HS-559 27203 2850.- Véhicule électrique HS-898 27204 Bienvenue chez LANDI. Qualité LANDI Chez LANDI
Actions de réduction de bruit sur un moteur poids lourd
 10 Actions de réduction de bruit sur un moteur poids lourd Laurent Moulin, Renault VI, 99, route de Lyon, 69802 Saint Priest, e-mail : laurent.moulin@renaultvi.com D epuis 1974 à aujourd hui, la réglementation
10 Actions de réduction de bruit sur un moteur poids lourd Laurent Moulin, Renault VI, 99, route de Lyon, 69802 Saint Priest, e-mail : laurent.moulin@renaultvi.com D epuis 1974 à aujourd hui, la réglementation
Casisa Anthony DOSSIER PERSONNEL
 Casisa Anthony TSSI DOSSIER PERSONNEL Année scolaire 2012-2013 La voiture solaire I) Planification 1) Introduction Dans le cadre du Projet Pluridisciplinaire Encadré en classe de Terminale SSI, nous avons
Casisa Anthony TSSI DOSSIER PERSONNEL Année scolaire 2012-2013 La voiture solaire I) Planification 1) Introduction Dans le cadre du Projet Pluridisciplinaire Encadré en classe de Terminale SSI, nous avons
Étude des Corrélations entre Paramètres Statiques et Dynamiques des Convertisseurs Analogique-Numérique en vue d optimiser leur Flot de Test
 11 juillet 2003 Étude des Corrélations entre Paramètres Statiques et Dynamiques des Convertisseurs Analogique-Numérique en vue d optimiser leur Flot de Test Mariane Comte Plan 2 Introduction et objectif
11 juillet 2003 Étude des Corrélations entre Paramètres Statiques et Dynamiques des Convertisseurs Analogique-Numérique en vue d optimiser leur Flot de Test Mariane Comte Plan 2 Introduction et objectif
Le réseau sans fil "Wi - Fi" (Wireless Fidelity)
") Professionnel Page 282 à 291 Accessoires Page 294 TPE / Soho Page 292 à 293 Le réseau sans fil "Wi - Fi" (Wireless Fidelity) Le a été défini par le Groupe de travail WECA (Wireless Ethernet Compatibility
Professionnel Page 282 à 291 Accessoires Page 294 TPE / Soho Page 292 à 293 Le réseau sans fil "Wi - Fi" (Wireless Fidelity) Le a été défini par le Groupe de travail WECA (Wireless Ethernet Compatibility
Les outils graphiques d expression pour l analyse fonctionnelle des systèmes Domaine d application : Représentation conventionnelle des systèmes
 Section : S Option : Sciences de l ingénieur Discipline : Génie Électrique Les outils graphiques d expression pour l analyse fonctionnelle des systèmes Domaine d application : Représentation conventionnelle
Section : S Option : Sciences de l ingénieur Discipline : Génie Électrique Les outils graphiques d expression pour l analyse fonctionnelle des systèmes Domaine d application : Représentation conventionnelle
TP 03 B : Mesure d une vitesse par effet Doppler
 TP 03 B : Mesure d une vitesse par effet Doppler Compétences exigibles : - Mettre en œuvre une démarche expérimentale pour mesurer une vitesse en utilisant l effet Doppler. - Exploiter l expression du
TP 03 B : Mesure d une vitesse par effet Doppler Compétences exigibles : - Mettre en œuvre une démarche expérimentale pour mesurer une vitesse en utilisant l effet Doppler. - Exploiter l expression du
Sommaire Table des matières
 Notice de montage 1 Sommaire Table des matières I. Mise en garde... 3 II. Avant de commencer... 4 1. Préparer vos outils... 4 2. Pièces nécessaires pour le montage de votre porte Keritek... 5 III. Étape
Notice de montage 1 Sommaire Table des matières I. Mise en garde... 3 II. Avant de commencer... 4 1. Préparer vos outils... 4 2. Pièces nécessaires pour le montage de votre porte Keritek... 5 III. Étape
Exercices Alternatifs. Une fonction continue mais dérivable nulle part
 Eercices Alternatifs Une fonction continue mais dérivable nulle part c 22 Frédéric Le Rou (copleft LDL : Licence pour Documents Libres). Sources et figures: applications-continues-non-derivables/. Version
Eercices Alternatifs Une fonction continue mais dérivable nulle part c 22 Frédéric Le Rou (copleft LDL : Licence pour Documents Libres). Sources et figures: applications-continues-non-derivables/. Version
Exercices Alternatifs. Une fonction continue mais dérivable nulle part
 Eercices Alternatifs Une fonction continue mais dérivable nulle part c 22 Frédéric Le Rou (copyleft LDL : Licence pour Documents Libres). Sources et figures: applications-continues-non-derivables/. Version
Eercices Alternatifs Une fonction continue mais dérivable nulle part c 22 Frédéric Le Rou (copyleft LDL : Licence pour Documents Libres). Sources et figures: applications-continues-non-derivables/. Version
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE
 BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un enseignement de spécialité autre
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un enseignement de spécialité autre
UE 503 L3 MIAGE. Initiation Réseau et Programmation Web La couche physique. A. Belaïd
 UE 503 L3 MIAGE Initiation Réseau et Programmation Web La couche physique A. Belaïd abelaid@loria.fr http://www.loria.fr/~abelaid/ Année Universitaire 2011/2012 2 Le Modèle OSI La couche physique ou le
UE 503 L3 MIAGE Initiation Réseau et Programmation Web La couche physique A. Belaïd abelaid@loria.fr http://www.loria.fr/~abelaid/ Année Universitaire 2011/2012 2 Le Modèle OSI La couche physique ou le
Compatibilité Électromagnétique
 Compatibilité Électromagnétique notions générales et applications à l électronique de puissance Ir. Stéphane COETS 18 mai 2005 Journée d étude en Électronique de Puissance 1 Plan de l exposé La Compatibilité
Compatibilité Électromagnétique notions générales et applications à l électronique de puissance Ir. Stéphane COETS 18 mai 2005 Journée d étude en Électronique de Puissance 1 Plan de l exposé La Compatibilité
STAGE PILOTAGE ET ASCENDANCE
 STAGE PILOTAGE ET ASCENDANCE L idée de créer de ce stage est venu d un constat : bon nombre de pilote ne sentent pas suffisamment en confiance sous leur voile pour partir en cross ou voler dans des conditions
STAGE PILOTAGE ET ASCENDANCE L idée de créer de ce stage est venu d un constat : bon nombre de pilote ne sentent pas suffisamment en confiance sous leur voile pour partir en cross ou voler dans des conditions