Estimation du mouvement. Marco Cagnazzo 14 mai 2012
|
|
|
- Pascale Martineau
- il y a 10 ans
- Total affichages :
Transcription
1 Estimation du mouvement Marco Cagnazzo 14 mai 2012

2 Plan Introduction La représentation du mouvement Les différentes techniques Applications et examples 2 Estimation du mouvement

3 Le mouvement dans les images Elément naturel constitutif des séquences d images Perception par le HVS (système visuel humain) Surtout en vision périphérique : - faible résolution - faible sensibilité aux couleurs Formation et nature des images - projection d une scène 3D sur un plan mobile, puis souséchantillonnage spatial et temporel objets en mouvement? - but : visualisation/interprétation par l homme, ou un système automatique. forte similarité entre images 3 Estimation du mouvement

4 POURQUOI ESTIMER LE MOUVEMENT? LE CODAGE DES IMAGES (1) Les 2 idées de base de la compression: Exploiter la redondance spatiale: techniques de codage pixel, codage par transformée, codage fractal,... Exploiter la redondance temporelle: en vidéo, il y a une forte similarité entre des images successives. D où l idée de construire un codage spatio-temporel 4 Estimation du mouvement

5 POURQUOI ESTIMER LE MOUVEMENT? LE CODAGE DES IMAGES (2) Le but est donc de diminuer la quantité d information à transmettre Eliminer la redondance temporelle Mais aussi adapter le codage au contenu de l image : - zone immobile : faible résolution temporelle. Inutile de tout coder, on fera du skipping. - zone en mouvement : faible résolution spatiale (vue par les bâtonnets, en périphérie). Inutile de dépenser trop, on quantifiera plus, ou bien on souséchantillonnera. 5 Estimation du mouvement

6 LA DIFFERENCE INTER-IMAGE 6 Estimation du mouvement

7 EXEMPLES D IMAGES D ERREUR 7 Estimation du mouvement

8 LA DIFFERENCE INTER IMAGE La différence inter-image n est pas une bonne mesure de la redondance temporelle Projeter sur l axe des mouvements est meilleur Les mouvements sont souvent peu complexes Estimation de mouvement Prédiction par compensation de la référence Codage du mouvement et de l erreur 8 Estimation du mouvement

9 POURQUOI ESTIMER LE MOUVEMENT? L ANALYSE DES IMAGES Possibilités : - discrimination des objets (segmentation) - suivi des objets (tracking) Applications : - surveillance, reconnaissance - militaire (guidage de missiles ) - codage (sprites, mosaïques) 9 Estimation du mouvement
 -")
10 EXEMPLE: RECONNAISSANCE DE FORMES 10 Estimation du mouvement

11 LA PROBLEMATIQUE DU MOUVEMENT : LE VRAI MOUVEMENT Différence entre mouvement et changement de luminance Tout mouvement n implique pas un changement de luminance: - objets uniformes ou de texture invariante selon la direction du déplacement La réciproque est encore moins vraie: - variations d illumination (ombres, réflexions, flashs) - bruit 11 Estimation du mouvement
 - bruit 11 Estimation du")
12 LA PROBLEMATIQUE DU MOUVEMENT : LE VRAI MOUVEMENT Vrais mouvements ou changements de luminance? but : analyse / codage => 2 hypothèses dans les estimateurs de mouvement: L'hypothèse de la luminance constante le long des trajectoires: L ( x, y, t ) = L ( x-dx, y-dy, t-1 ) pour tout point de l image Prise en compte des variations d illumination: L ( x, y, t ) = a(x,y,t) L ( x-dx, y-dy, t-1 ) 12 Estimation du mouvement
 = a(x,y,t) L ( x-dx, y-dy, t-1 ) 12")
13 DUALITE ESTIMATION / SEGMENTATION Problème de l'œuf et de la poule... - pour estimer le mouvement correctement, il faut connaître les zones de mouvement homogène. - pour délimiter ces zones, il faut connaître le mouvement dans l image. Les solutions - estimation / segmentation menées de façon conjointe (robustesse de l estimation) 13 Estimation du mouvement

14 DUALITE ESTIMATION / SEGMENTATION (2) mais l'ambiguïté forme / mouvement demeure Pour représenter un mouvement, il faut - définir un modèle de mouvement: transformation définie par n paramètres - définir la/les zone(s) de l image où l appliquer Le modèle contient à la fois les informations de mouvement et de surface de la zone considérée. 14 Estimation du mouvement

15 LA COMPENSATION DE MOUVEMENT On a vu que la différence inter-image n était pas une bonne solution (trop de paramètres). Principe de la compensation : A partir : - d une image de référence I R - du champ des déplacements estimés de l image I R à l image I on reconstruit une image compensée I C, prédiction de I Exemple : D(x,y) = (dx,dy) I C (x,y) = I R (x - dx, y - dy) 15 Estimation du mouvement

16 EXEMPLES Im1 Diff 16 Estimation du mouvement Im2 Erreur MCP

17 Reference image Current image 17 Estimation du mouvement

18 18 Estimation du mouvement Difference image

19 19 Estimation du mouvement Motion vector field

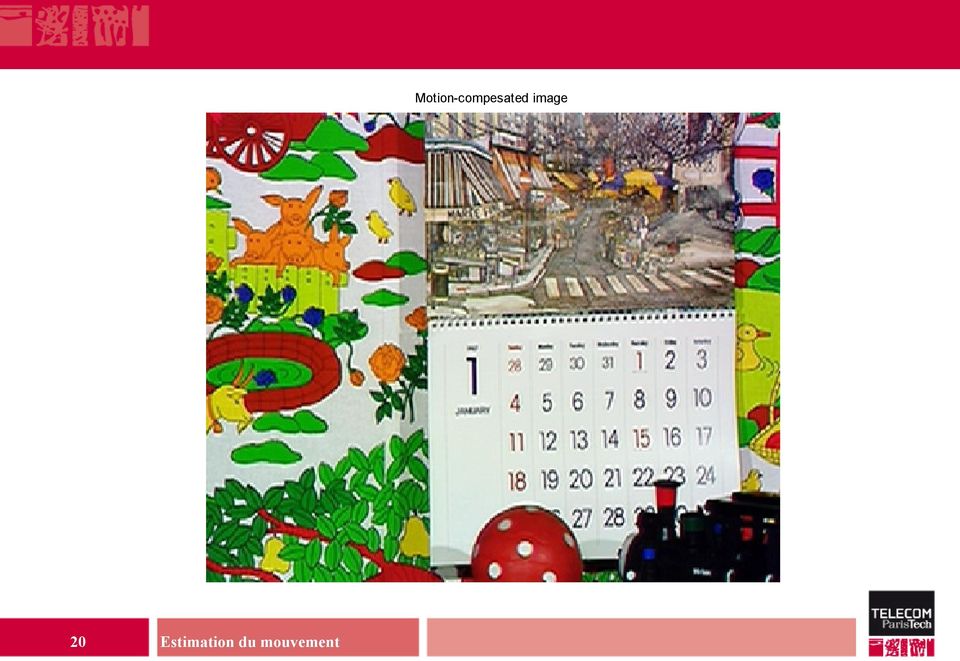
20 20 Estimation du mouvement Motion-compesated image
21 21 Estimation du mouvement MC error
22 D OU LE SCHEMA CLASSIQUE DE CODAGE Input x e Codage de l erreur Buffer Sortie ME Décodage erreur MV MC Frame Buffer x q e q x p 22 Estimation du mouvement
23 DECODEUR Input Buffer Entrée MV Décodage erreur MC Frame Buffer x q x p x q 23 Estimation du mouvement
24 LA PROBLEMATIQUE DU MOUVEMENT: LES OCCLUSIONS T-1 T 24 Estimation du mouvement
25 LES MODES DE COMPENSATION Occlusions => le codage n est pas forcément causal! Il vaut mieux parfois faire des prédictions par rapport au futur plutôt que par rapport au passé. Compensation backward Compensation forward Compensation bidirectionnelle 25 Estimation du mouvement
26 COMPENSATION FORWARD V Axe temporel Image précédente Image courante 26 Estimation du mouvement
27 COMPENSATION BACKWARD V Axe temporel Image courante Image suivante (référence) 27 Estimation du mouvement
28 COMPENSATION BIDIRECTIONNELLE Vnext Axe temporel Vprevious Image précédente Image courante Image suivante 28 Estimation du mouvement
29 APPLICATION: CAS DE MPEG Ordre d affichage: Prédictions Backward B0 B1 I3 B4 B5 P6 B7 B8 P9 B10 B11 P12 B13 B14 I15 Prédictions Forward Ordre de transmission: I3 B0 B1 P6 B4 B5 P9 B7 B8 P12 B10 B11 I15 B13 B14 29 Estimation du mouvement
30 SCHEMA CLASSIQUE DE CODAGE SPATIO-TEMPOREL HYBRID Codage spatial Control Regulation Input x e DCT Q VLC Channel Buffer x p Q* ME IDCT MV MC Frame Buffer x q e q x p Codage temporel 30 Estimation du mouvement
31 LA PROBLEMATIQUE DU MOUVEMENT : L EVALUATION DES RESULTATS Ne pas perdre de vue que l estimation de mouvement est un problème très complexe. Beaucoup de cas critiques: - drapeau flottant au vent - l eau, la mer - le bruit - flash, reflets L évaluation est à relier au but recherché - En analyse : mouvement réel, selon critère à définir => efficacité in fine du système d analyse - En codage : PSNR, quantité d information transmise => efficacité in fine du système de codage 31 Estimation du mouvement Définition d un test set important
32 L EVALUATION DES RESULTATS EN CODAGE 2 méthodes - qualité de reconstruction (PSNR, EQM), mais limité car ne permet pas de discriminer l efficacité de l estimation du mouvement de l efficacité du codage spatial, de la régulation de débit etc - quantité d information à transmettre (entropie). On effectue un codage à pas de quantification constant pour by-passer la régulation et on regarde le nombre de bits produit. Généralement on combine les deux: relevé de la quantité de bits produite + inspection visuelle / PSNR. 32 Estimation du mouvement
33 L EVALUATION DES RESULTATS EN CODAGE (2) Prendre en considération le contexte de l estimation - ori->ori, cod->ori, connaissances à priori (segmentation, mouvement ) Prendre en considération la complexité de l estimation - la rapidité de l estimation, de la compensation : tailles d images, complexités relatives - la complexité de l algorithme (implantation, HW/SW partitionning) A titre d exemple, il vaut mieux faire une estimation de mouvement à partir d une image codée / décodée. Mais les premiers codeurs MPEG utilisaient tous une estimation de mouvement sur les images originales pour des raisons de coût / temps calcul / mémoire. 33 Estimation du mouvement
34 SYNTHESE But de l estimation de mouvement = non seulement suppression redondance temporelle (codage), mais beaucoup d autres applications (tracking, reconnaissance, surveillance ) Notion de compensation de mouvement, meilleure que la différence inter-image Occlusion différents modes de compensation Evaluation des performances prendre en compte le contexte et la complexité de l algorithme 34 Estimation du mouvement
35 Plan Introduction La représentation du mouvement Les différentes techniques Applications et examples 35 Estimation du mouvement
36 LA REPRESENTATION DU MOUVEMENT Avant toute estimation de mouvement, il faut décider de sa description, i.e. du modèle mathématique par lequel on va représenter le mouvement 2D. t t+1 Dx Dy R <-> Dx Dy Le mouvement est représenté par : - l'équation formelle du modèle - les paramètres le définissant : paramètres à estimer - la zone sur laquelle ils s appliquent 36 Estimation du mouvement
37 LE FLUX OPTIQUE En théorie le problème est mal posé : - image = projection 2D de la scène 3D - Pour trouver les mouvements 3D il faudrait analyser un flux d images stéréos. On ne cherchera pas les vrais vecteurs mais à évaluer les pseudo-vecteurs décrivant les mouvements des objets dans le plan image. Ces pseudo-vecteurs constituent ce que l on nomme le flux optique. 37 Estimation du mouvement
38 LE FLUX OPTIQUE Représentation précise, simple dans le principe mais coûteuse 1 pixel = 1 vecteur 38 Estimation du mouvement
39 DIFFERENCE FLUX OPTIQUE / CHAMP DE VECTEURS REEL Boule en rotation pure - flux optique nul, champ de vitesse réel non nul image Surface réfléchissante éclairée par une source en mouvement : - flux optique non nul, champ de vitesse réel nul 39 Estimation du mouvement image
40 LA REPRESENTATION DU MOUVEMENT: LES MODELES DE MOUVEMENT Caractéristiques des modèles : (selon application) - aptitude a bien représenter les mouvements, même complexes - compacité de la représentation (transmission, codage) - facilite d interprétation et manipulation - flexibilité (adaptation à la complexité du mouvement) Deux approches : - calcul du champs dense et approximation - projection de la scène 3D sur le plan image 40 Estimation du mouvement
41 Plan Introduction La représentation du mouvement Les différentes techniques Applications et examples 41 Estimation du mouvement
42 LES PRINCIPALES TECHNIQUES Nous nous limiterons à l estimation de mouvement de translation Les modèles plus complexes (affine, quadratique) rendent effectivement compte de mouvements plus complexes (rotation, extension). Cependant, en pratique, pour le codage, ils sont peu utilisés car trop coûteux. Ces méthodes sont de toute façon héritées des méthodes classiques présentées ci-après. 42 Estimation du mouvement
43 LES PRINCIPALES TECHNIQUES (2) Deux grandes familles de méthodes d estimation - les techniques de mise en correspondance (matching) - les méthodes différentielles 44 Estimation du mouvement
44 LES TECHNIQUES DE MISE EN CORRESPONDANCE Principe : Mise en correspondance de zones / primitives entre deux images successives et recherche de la plus grande similarité (corrélation maximale) => block-matching, région-matching, contour-matching Utilisation : Massive : le block-matching est la technique la plus classique d estimation de mouvement (MPEG1,2,4, H.26x...) 45 Estimation du mouvement
45 LES TECHNIQUES DE MISE EN CORRESPONDANCE (2) Avantages : - minimisation directe de l erreur de reconstruction - fiabilité - simplicité du principe, et parallèlisation possible - méthode connue, maîtrisée, optimisée... Inconvénients : - complexité pour un espace de recherche important - pauvreté de la modélisation pour une complexité raisonnable 46 Estimation du mouvement
46 LES TECHNIQUES DE MISE EN CORRESPONDANCE (3) Caractéristiques : -Support du matching -Modèle du mouvement - Critère à optimiser - Stratégie de recherche 47 Estimation du mouvement
47 Block-matching B k (p) B h (p+v) d(v)=d(b k (p), B h (p+v) ) v* = arg min d(v) v 48 Estimation du mouvement
48 49 Block-matching Test ME Vecteur choisi Bloc codé ) ( ) (, ) ( v p p v h B k B d d ) ( arg min * v v v d ) ( ) ( * v p p h B k B Estimation du mouvement
49 Block-matching : exemple 50 Estimation du mouvement
50 Block-matching : exemple 51 Estimation du mouvement
51 Block-matching : exemple 52 Estimation du mouvement
52 Block-matching : exemple 53 Estimation du mouvement
53 Block-matching : exemple 54 Estimation du mouvement
54 Block-matching : exemple 55 Estimation du mouvement
55 Block-matching : exemple 56 Estimation du mouvement

56 Block-matching : exemple 57 Estimation du mouvement
57 LIMITATIONS DU BLOCK MATCHING Les blocs ne peuvent correspondre aux objets réels de la scène Choisir la taille des blocs est périlleux: Petits blocs => mouvements homogènes, contours bien suivis, mais plus difficile à coder Plus grands blocs => réduction du temps calcul, patterns plus significatifs pour la mise en correspondance, mais mouvement mal estimé sur les bords du bloc. Généralement la taille choisie est 8x8, 16x16 ou 32x32. MPEG: taille normalisée = 16x16 pixels (macroblock) 58 Estimation du mouvement
58 CRITERES DE RESSEMBLANCE Maximisation de la fonction d intercorrélation normalisée max ( i, j) W (m,n) B (m,n) B (m,n) B ( i, j) W ( m, n) B f(m,n,t)f(m-i,n-j,t-1) 2 2 f (m,n,t) f (m-i,n-j,t-1) Minimisation de l erreur quadratique moyenne (MSE) Minimisation de l erreur absolue moyenne (MAE) 2 (ˆ,ˆ) i j arg min J( i, j) ( i, j) W J( i, j) ( m, n) B f(m,n,t)-f(m-i,n-j,t-1) min f(m,n,t)-f(m-i,n-j,t-1) 59 Estimation du mouvement
59 CRITERES DE RESSEMBLANCE Régularisation des vecteur Pénalisation des vecteurs irreguliers ou chers à coder v * arg min v d( v) r( v) 60 Estimation du mouvement
60 Exemple 61 Estimation du mouvement
61 Exemple Entropie MVF: Kbits PSNR erreur prediction: Entropie MVF: Kbits PSNR erreur prediction: SSD D+ R 62 Estimation du mouvement
62 Exemple Entropie MVF: Kbits PSNR erreur prediction : Entropie MVF: Kbits PSNR erreur prediction : SSD D+ R 63 Estimation du mouvement
63 OPTIMISATIONS DU BMA L estimation de mouvement est un point critique pour un système de codage temps réel, en particulier en TV numérique => nécessité de réduire les temps calculs. Première alternative: Pour accélérer le temps calcul on contraint l estimation block matching par une valeur maximale de vecteur (plage de recherche). Cette contrainte se justifie: - Il est rare qu un objet traverse l écran d une image sur l autre. - Si un vecteur est hors plage, la prédiction sera mauvaise, l objet mal codé. Mais le déplacement est si rapide que l œil ne verra pas forcément les erreurs. 64 Estimation du mouvement
64 LIMITATION A UNE PLAGE DE RECHERCHE Plusieurs raffinements possibles: - La zone de recherche est généralement rectangulaire car statistiquement il y a plus de mouvements horizontaux que verticaux. -la taille de la zone peut être adaptée à la distance temporelle image de référence / image courante. 65 Estimation du mouvement
65 Full search n 2 calculs 66 Estimation du mouvement
66 RECHERCHES SOUS-OPTIMALES L itérations (complexité réduite) Initialisation : A chaque itération ( iˆ, ˆj ) (0,0) 0 0 l 1,..., L W ˆ ˆ l ( i, j) W,( i il 1, j jl 1) Wl (ˆ i, ˆj ) arg min J( i, j) l l (i,j) W l Estimation finale : ( iˆ, ˆj ) ( iˆ, ˆj ) l l Exemples Recherche 2D logarithmique Algorithme en 3 coups («three-step algorithm») Recherche dans des directions conjuguées 67 Estimation du mouvement
67 Recherche 2D logarithmique Fenêtre de recherche : n W A,..., A A,..., A, 2 A 2 1. n Forme des fenêtres de recherche partielle : j j j j j F(2 ) 0,0, 2,0, 0,2, 2,0, 0, 2, j 1 2 F(1) 1,0,1 Initialisation : n 1 W ˆ ˆ 1 F 2 i1, j1 Si ˆ, ˆ 0,0 i j W W Sinon, 2 W 2 F 2 n On arrête l algorithme quand 68 Estimation du mouvement W F 1 nombre d'itérations variable L
68 Algorithme en 3 coups («three-step algorithm») On garantit un nombre fixe d itérations (en général, N = 3) Fenêtre de recherche à l itération j : W F 2 j N j 69 Estimation du mouvement
69 N-step search 9(log 2 n-1) calculs 70 Estimation du mouvement
70 Recherche dans des directions conjuguées Recherche verticale : W 1 0,0, 1,0, 1,0 si l une des positions extrêmes correspond au minimum du critère J, on poursuit la recherche en conservant la même fenêtre pour les itérations suivantes si le minimum est localisé en (0,0) (ou sur un bord de la fenêtre maximale de recherche W) on passe à l itération suivante Recherche horizontale : W 2 0,0, 0,1, 0, 1 Si ˆ ˆ i ', j est le vecteur estimé au terme des deux ' L L premières étapes de l algorithme, on peut éventuellement réaliser une dernière recherche dans la direction iˆ ˆ ', j ' 71 Estimation du mouvement L L
71 Cross search 2n-1 calculs 72 Estimation du mouvement
72 SECONDE ALTERNATIVE: ESTIMATION HIERARCHIQUE MULTIRESOLUTION Consiste à effectuer d abord l estimation sur une version souséchantillonnée de l image. Ensuite chaque bloc fils de l image hérite du vecteur estimé pour son père et un raffinement local a lieu. Ce procédé mélange : - les aspects hiérarchique (recherche multi-étape) avec héritage de vecteurs - et multi-résolution (recherche à différentes résolutions). 73 Estimation du mouvement
73 HIERARCHICAL BMA Vpère Résolution 1/4 Vfinal Plage de recherche du raffinement Vhérité Résolution originale 74 Estimation du mouvement
74 ESTIMATION HIERARCHIQUE ET ESTIMATION MULTI-ECHELLE Outils complémentaires pour l'amélioration des méthodes classiques : - accélération de la recherche - amélioration des résultats A condition de : - bâtir un schéma global cohérent et adapté - avoir une bonne stratégie de propagation des paramètres 75 Estimation du mouvement
75 Méthodes différentielles: Méthode du gradient LA CONTRAINTE DU MOUVEMENT Utilise le gradient de l image APPROCHE DIFFERENTIELLE Optimisation globale (par régions) Méthode pel-récursive (algorithme de Cafforio-Roca): estimation a priori du déplacement test de fiabilité de l estimation mise à jour de l estimation 76 Estimation du mouvement
76 Méthodes différentielles: Méthode du gradient 77 Estimation du mouvement
77 Méthodes différentielles: Méthode du gradient L équation ne permet de trouver que la projection du champ de mouvement sur le gradient En plus, la présence du bruit et les variation de luminosité peuvent faire en sorte que l équation ne soit parfaitement respectée Alors on relaxé l équation et on ajoute alors une contrainte de régularité pour le champ de mouvement 78 Estimation du mouvement
78 Méthodes différentielles: Méthode du gradient 79 Estimation du mouvement
79 Méthodes différentielles: Méthode du gradient Pour minimiser : On doit imposer : 80 Estimation du mouvement
80 Méthodes différentielles: Algorithme de Cafforio-Rocca Entrée: Image de référence Image courante Champ d initialisation Sortie Champ raffiné, dense I k-1 I k-1 v IN Motion Vector Refinement v OUT I k I k 81 Estimation du mouvement
81 Algorithme de Cafforio-Rocca Initialisation Le vecteur de mouvement peut être initialisé : Par un vecteur associé au bloc Par une fonction des vecteurs voisins Vector associated to previous pel Mean of neighbors Vector from input MVF 82 Estimation du mouvement
82 Algorithme de Cafforio-Rocca Validation Validation Le vecteur sorti de l inisialisation est comparé au vecteur nul en termes d erreur de prédiction 83 Estimation du mouvement
83 Algorithme de Cafforio-Rocca Raffinement Le vecteur validé est raffiné par une petite modification. On veut minimiser l erreur de prédiction sous contrainte que la modification du vecteur soit petite Le vecteur final est donc : La correction est trouvée en minimisant le critère : Regularisation Erreur de prédiction 84 Estimation du mouvement
84 Algorithme de Cafforio-Rocca Raffinement 85 Estimation du mouvement
85 Algorithme de Cafforio-Rocca Raffinement 86 Estimation du mouvement
86 Algorithme de Cafforio-Rocca Raffinement 87 Estimation du mouvement
87 Algorithme de Cafforio-Rocca Exemple Mouvement du fond (blanc) Mouvement de l objet rouge Initialisation : mouvement associé au bloc (objet rouge) Le vecteur n est pas validé : il est mis à zéro Le raffinement permet de retrouver le mouvement du fond Quand on arrive au premier pixel rouge, l initialisation n est pas validé Le raffinement suivant permet de retrouver le mouvement de l objet Initialisation (= objet rouge) 88 Estimation du mouvement

88 Algorithme de Cafforio-Rocca Résultats PSNR before CR: 24.1 PSNR after CR: Estimation du mouvement
89 Algorithme de Cafforio-Rocca Résultats 90 Estimation du mouvement
90 CARACTERISTIQUES DES METHODES DIFFERENTIELLES (2) Avantages : - bon compromis dimension espace de recherche / vitesse de recherche - possibilité d utiliser des modèles à plus de paramètres, donc plus génériques, donc de les appliquer sur de grandes régions, menant à un débit d information de mouvement inférieur. - flexibilité, et en particulier bonne adaptation aux méthodes orientées objet. Inconvénients : - difficile à maîtriser - convergence non assurée/divergence - reste complexe, et notamment difficile à implanter en HW 91 Estimation du mouvement
91 Plan Introduction La représentation du mouvement Les différentes techniques Applications et exemples 92 Estimation du mouvement
92 SCAN RATE CONVERSION Exemple du téléviseur 100Hz Dans un téléviseur 100Hz, le nombre d images affichées par seconde est doublé. L idée est de reconstruire artificiellement les images qui n existaient pas à la transmission, pour améliorer la qualité d image. t -T Trame originale Trame interpolée t t +T t + 2T Trames 50Hz Trames 100Hz 93 Estimation du mouvement
93 SCAN RATE CONVERSION (2) Pour créer les trames absentes, on va faire de l estimation de mouvement et construire une image interpolée compensée en mouvement. Trame n-1 D/2 Trame n - 1/2 -D/2 Trame n 94 Estimation du mouvement
94 SCAN RATE CONVERSION (3) TV 100Hz, => marché grand public, la notion de coût est très importante. Techniquement, des chips dédiés sont intégré dans le téléviseur. Coût réduit => traitement simple, limitation de la mémoire image. On utilisera du block matching (solution bien maîtrisée, optimisée) avec des simplifications spécifique à l application. Corrélation très forte entre les trames => on limite le nombre de blocs candidats, en fonction du mouvement précédemment déterminé (algorithme récursif). Typiquement si l objet se déplace sur le plan horizontal, on testera les 3 ou 4 blocs dans cette direction privilégiée + un petit nombre de blocs dans des direction aléatoires. 95 Estimation du mouvement
95 REDUCTION DE BRUIT But : - amélioration de la qualité de la source (principalement des films) - amélioration de la qualité de compression (le bruit oblige à dépenser beaucoup de bits au codage) Solutions : - filtre passe-bas => flou dans l image - filtrer sur la différence inter-image => low end Réduction de bruit professionnelle: filtrage médian adaptatif + filtre temporel récursif, compensés en mouvement. 96 Estimation du mouvement
96 FILTRE MEDIAN Idée de base du filtrage médian: supprimer les pics de bruit haute fréquence tout en conservant les contours. M1 = Med(M1,M2,M3,M4,M5) L utilisation d images compensées en mouvement améliore le résultat car le filtrage est effectué sur 3 champs représentant le même instant temporel: on ne filtre que le bruit, le mouvement ne rentre pas en compte. 97 Estimation du mouvement
97 FILTRE RECURSIF En l absence de mouvement, le filtrage temporel est le traitement optimal pour la réduction de bruit. Mais il y a toujours du mouvement entre les images. Dans le cas de mouvement non compensé, un flou est généralement introduit par le traitement. Idée de base du filtre temporel récursif: filtrer le bruit entre les images. Pour chaque pixel: Out(i) t = F(M(i), Out(i) t-1 ) M t Out t-1 F Out t Frame delay En utilisant Out t-1 image prédite forward de Out t on obtient une estimation plus fine du bruit intrinsèque de l image. On effectue généralement une moyenne pondérée adaptative, dépendant des discontinuités entre les niveaux de chaque pixel. Ceci permet de préserver la qualité du filtrage sur les zones en mouvement. 98 Estimation du mouvement
98 UTILISATION Tendance: ce type de réducteur de bruit est désormais directement implanté dans les codeurs vidéo, les vecteurs issus de l estimateur de mouvement étant disponibles. Le type d estimateur utilisé est donc un block matching. De telles structures de réducteur de bruit sont aussi utilisées en imagerie médicale, par nature, très bruitées. Les techniques les plus appropriées dans ce cas sont aussi les techniques de matching. 99 Estimation du mouvement
99 CONCLUSION Les applications de l estimation de mouvement sont multiples: codage, reconnaissance, amélioration de la qualité d image, segmentation... Avant toute estimation de mouvement il convient de se fixer un modèle mathématique du mouvement On cherche à déterminer des vecteurs représentant le flot optique, différent du mouvement réel 3D. Plusieurs méthodes: matching, méthodes différentielles... En codage vidéo, le block matching reste la solution appropriée en terme de complexité, temps calcul, cohérence des résultats. 100 Estimation du mouvement
Codage hiérarchique et multirésolution (JPEG 2000) Codage Vidéo. Représentation de la couleur. Codage canal et codes correcteurs d erreur
 Codage Vidéo. Représentation de la couleur. Codage canal et codes correcteurs d erreur") Codage hiérarchique et multirésolution (JPEG 000) Codage Vidéo Représentation de la couleur Codage canal et codes correcteurs d erreur Format vectoriel (SVG - Scalable Vector Graphics) Organisation de
Codage hiérarchique et multirésolution (JPEG 000) Codage Vidéo Représentation de la couleur Codage canal et codes correcteurs d erreur Format vectoriel (SVG - Scalable Vector Graphics) Organisation de
Analyse de la vidéo. Chapitre 4.1 - La modélisation pour le suivi d objet. 10 mars 2015. Chapitre 4.1 - La modélisation d objet 1 / 57
 Analyse de la vidéo Chapitre 4.1 - La modélisation pour le suivi d objet 10 mars 2015 Chapitre 4.1 - La modélisation d objet 1 / 57 La représentation d objets Plan de la présentation 1 La représentation
Analyse de la vidéo Chapitre 4.1 - La modélisation pour le suivi d objet 10 mars 2015 Chapitre 4.1 - La modélisation d objet 1 / 57 La représentation d objets Plan de la présentation 1 La représentation
Quantification Scalaire et Prédictive
 Quantification Scalaire et Prédictive Marco Cagnazzo Département Traitement du Signal et des Images TELECOM ParisTech 7 Décembre 2012 M. Cagnazzo Quantification Scalaire et Prédictive 1/64 Plan Introduction
Quantification Scalaire et Prédictive Marco Cagnazzo Département Traitement du Signal et des Images TELECOM ParisTech 7 Décembre 2012 M. Cagnazzo Quantification Scalaire et Prédictive 1/64 Plan Introduction
Codage vidéo par block matching adaptatif
 Traitement et analyse d'images(39) Codage vidéo par block matching adaptatif Abdelhamid Djeffal Département d informatique Université Mohamed Khider BISKRA, ALGERIE [email protected] Zine Eddine
Traitement et analyse d'images(39) Codage vidéo par block matching adaptatif Abdelhamid Djeffal Département d informatique Université Mohamed Khider BISKRA, ALGERIE [email protected] Zine Eddine
L analyse d images regroupe plusieurs disciplines que l on classe en deux catégories :
 La vision nous permet de percevoir et d interpreter le monde qui nous entoure. La vision artificielle a pour but de reproduire certaines fonctionnalités de la vision humaine au travers de l analyse d images.
La vision nous permet de percevoir et d interpreter le monde qui nous entoure. La vision artificielle a pour but de reproduire certaines fonctionnalités de la vision humaine au travers de l analyse d images.
Traitement bas-niveau
 Plan Introduction L approche contour (frontière) Introduction Objectifs Les traitements ont pour but d extraire l information utile et pertinente contenue dans l image en regard de l application considérée.
Plan Introduction L approche contour (frontière) Introduction Objectifs Les traitements ont pour but d extraire l information utile et pertinente contenue dans l image en regard de l application considérée.
Chaine de transmission
 Chaine de transmission Chaine de transmission 1. analogiques à l origine 2. convertis en signaux binaires Échantillonnage + quantification + codage 3. brassage des signaux binaires Multiplexage 4. séparation
Chaine de transmission Chaine de transmission 1. analogiques à l origine 2. convertis en signaux binaires Échantillonnage + quantification + codage 3. brassage des signaux binaires Multiplexage 4. séparation
Livrable 2.1 Rapport d analyse et de restructuration de code monothread des modules P, T, Q et F de l encodage MPEG-4 AVC
 Groupe des Ecoles des Télécommunications Institut National des Télécommunications Département ARTEMIS Advanced Research & TEchniques for Multidimensional Imaging Systems Livrable 2.1 Rapport d analyse
Groupe des Ecoles des Télécommunications Institut National des Télécommunications Département ARTEMIS Advanced Research & TEchniques for Multidimensional Imaging Systems Livrable 2.1 Rapport d analyse
 Utilisation d informations visuelles dynamiques en asservissement visuel Armel Crétual IRISA, projet TEMIS puis VISTA L asservissement visuel géométrique Principe : Réalisation d une tâche robotique par
Utilisation d informations visuelles dynamiques en asservissement visuel Armel Crétual IRISA, projet TEMIS puis VISTA L asservissement visuel géométrique Principe : Réalisation d une tâche robotique par
DEVANT L UNIVERSITE DE RENNES 1
 N o d ordre: 3063 THÈSE présentée DEVANT L UNIVERSITE DE RENNES 1 pour obtenir le grade de : DOCTEUR DE L UNIVERSITE DE RENNES 1 Mention Informatique par Nathalie CAMMAS Équipe d accueil : France Télécom
N o d ordre: 3063 THÈSE présentée DEVANT L UNIVERSITE DE RENNES 1 pour obtenir le grade de : DOCTEUR DE L UNIVERSITE DE RENNES 1 Mention Informatique par Nathalie CAMMAS Équipe d accueil : France Télécom
Géométrie discrète Chapitre V
 Géométrie discrète Chapitre V Introduction au traitement d'images Géométrie euclidienne : espace continu Géométrie discrète (GD) : espace discrétisé notamment en grille de pixels GD définition des objets
Géométrie discrète Chapitre V Introduction au traitement d'images Géométrie euclidienne : espace continu Géométrie discrète (GD) : espace discrétisé notamment en grille de pixels GD définition des objets
Master IMA - UMPC Paris 6 RDMM - Année 2009-2010 Fiche de TP
 Master IMA - UMPC Paris 6 RDMM - Année 2009-200 Fiche de TP Préliminaires. Récupérez l archive du logiciel de TP à partir du lien suivant : http://www.ensta.fr/~manzaner/cours/ima/tp2009.tar 2. Développez
Master IMA - UMPC Paris 6 RDMM - Année 2009-200 Fiche de TP Préliminaires. Récupérez l archive du logiciel de TP à partir du lien suivant : http://www.ensta.fr/~manzaner/cours/ima/tp2009.tar 2. Développez
Chap17 - CORRECTİON DES EXERCİCES
 Chap17 - CORRECTİON DES EXERCİCES n 3 p528 Le signal a est numérique : il n y a que deux valeurs possibles pour la tension. Le signal b n est pas numérique : il y a alternance entre des signaux divers
Chap17 - CORRECTİON DES EXERCİCES n 3 p528 Le signal a est numérique : il n y a que deux valeurs possibles pour la tension. Le signal b n est pas numérique : il y a alternance entre des signaux divers
Transmission d informations sur le réseau électrique
 Transmission d informations sur le réseau électrique Introduction Remarques Toutes les questions en italique devront être préparées par écrit avant la séance du TP. Les préparations seront ramassées en
Transmission d informations sur le réseau électrique Introduction Remarques Toutes les questions en italique devront être préparées par écrit avant la séance du TP. Les préparations seront ramassées en
Capacité d un canal Second Théorème de Shannon. Théorie de l information 1/34
 Capacité d un canal Second Théorème de Shannon Théorie de l information 1/34 Plan du cours 1. Canaux discrets sans mémoire, exemples ; 2. Capacité ; 3. Canaux symétriques ; 4. Codage de canal ; 5. Second
Capacité d un canal Second Théorème de Shannon Théorie de l information 1/34 Plan du cours 1. Canaux discrets sans mémoire, exemples ; 2. Capacité ; 3. Canaux symétriques ; 4. Codage de canal ; 5. Second
Analyse d images. [email protected]. Edmond Boyer UFRIMA 1
 Analyse d images [email protected] Edmond Boyer UFRIMA 1 1 Généralités Analyse d images (Image Analysis) : utiliser un ordinateur pour interpréter le monde extérieur au travers d images. Images Objets
Analyse d images [email protected] Edmond Boyer UFRIMA 1 1 Généralités Analyse d images (Image Analysis) : utiliser un ordinateur pour interpréter le monde extérieur au travers d images. Images Objets
Opérations de base sur ImageJ
 Opérations de base sur ImageJ TPs d hydrodynamique de l ESPCI, J. Bico, M. Reyssat, M. Fermigier ImageJ est un logiciel libre, qui fonctionne aussi bien sous plate-forme Windows, Mac ou Linux. Initialement
Opérations de base sur ImageJ TPs d hydrodynamique de l ESPCI, J. Bico, M. Reyssat, M. Fermigier ImageJ est un logiciel libre, qui fonctionne aussi bien sous plate-forme Windows, Mac ou Linux. Initialement
ISO/CEI 11172-3 NORME INTERNATIONALE
 NORME INTERNATIONALE ISO/CEI 11172-3 Première édition 1993-08-01 Technologies de l information - Codage de l image animée et du son associé pour les supports de stockage numérique jusqu à environ Ii5 Mbit/s
NORME INTERNATIONALE ISO/CEI 11172-3 Première édition 1993-08-01 Technologies de l information - Codage de l image animée et du son associé pour les supports de stockage numérique jusqu à environ Ii5 Mbit/s
Introduction au Data-Mining
 Introduction au Data-Mining Alain Rakotomamonjy - Gilles Gasso. INSA Rouen -Département ASI Laboratoire PSI Introduction au Data-Mining p. 1/25 Data-Mining : Kèkecé? Traduction : Fouille de données. Terme
Introduction au Data-Mining Alain Rakotomamonjy - Gilles Gasso. INSA Rouen -Département ASI Laboratoire PSI Introduction au Data-Mining p. 1/25 Data-Mining : Kèkecé? Traduction : Fouille de données. Terme
M1 Informatique, Réseaux Cours 9 : Réseaux pour le multimédia
 M1 Informatique, Réseaux Cours 9 : Réseaux pour le multimédia Olivier Togni Université de Bourgogne, IEM/LE2I Bureau G206 [email protected] 24 mars 2015 2 de 24 M1 Informatique, Réseaux Cours
M1 Informatique, Réseaux Cours 9 : Réseaux pour le multimédia Olivier Togni Université de Bourgogne, IEM/LE2I Bureau G206 [email protected] 24 mars 2015 2 de 24 M1 Informatique, Réseaux Cours
Technique de compression des images médicales 4D
 Technique de compression des images médicales 4D Leila Belhadef 1 et Zoulikha Mekkakia 1 1 Département d Informatique, USTO-MB, BP 1505 El Mnaouer, Oran, Algérie [email protected], [email protected]
Technique de compression des images médicales 4D Leila Belhadef 1 et Zoulikha Mekkakia 1 1 Département d Informatique, USTO-MB, BP 1505 El Mnaouer, Oran, Algérie [email protected], [email protected]
Groupe Eyrolles, 2006, ISBN : 2-212-11959-3
 Groupe Eyrolles, 2006, ISBN : 2-212-11959-3 annexe B Piano Corner, (c) 2005 par Zsolt Stefan : http://deeppixel.uw.hu/gallery.html YafRay, le moteur de rendu photoréaliste Dès sa création, par une équipe
Groupe Eyrolles, 2006, ISBN : 2-212-11959-3 annexe B Piano Corner, (c) 2005 par Zsolt Stefan : http://deeppixel.uw.hu/gallery.html YafRay, le moteur de rendu photoréaliste Dès sa création, par une équipe
Cours de Mécanique du point matériel
 Cours de Mécanique du point matériel SMPC1 Module 1 : Mécanique 1 Session : Automne 2014 Prof. M. EL BAZ Cours de Mécanique du Point matériel Chapitre 1 : Complément Mathématique SMPC1 Chapitre 1: Rappels
Cours de Mécanique du point matériel SMPC1 Module 1 : Mécanique 1 Session : Automne 2014 Prof. M. EL BAZ Cours de Mécanique du Point matériel Chapitre 1 : Complément Mathématique SMPC1 Chapitre 1: Rappels
Transmission de données. A) Principaux éléments intervenant dans la transmission
 Principaux éléments intervenant dans la transmission") Page 1 / 7 A) Principaux éléments intervenant dans la transmission A.1 Equipement voisins Ordinateur ou terminal Ordinateur ou terminal Canal de transmission ETTD ETTD ETTD : Equipement Terminal de Traitement
Page 1 / 7 A) Principaux éléments intervenant dans la transmission A.1 Equipement voisins Ordinateur ou terminal Ordinateur ou terminal Canal de transmission ETTD ETTD ETTD : Equipement Terminal de Traitement
Intérêt du découpage en sous-bandes pour l analyse spectrale
 Intérêt du découpage en sous-bandes pour l analyse spectrale David BONACCI Institut National Polytechnique de Toulouse (INP) École Nationale Supérieure d Électrotechnique, d Électronique, d Informatique,
Intérêt du découpage en sous-bandes pour l analyse spectrale David BONACCI Institut National Polytechnique de Toulouse (INP) École Nationale Supérieure d Électrotechnique, d Électronique, d Informatique,
INTRODUCTION A L ELECTRONIQUE NUMERIQUE ECHANTILLONNAGE ET QUANTIFICATION I. ARCHITECTURE DE L ELECRONIQUE NUMERIQUE
 INTRODUCTION A L ELECTRONIQUE NUMERIQUE ECHANTILLONNAGE ET QUANTIFICATION I. ARCHITECTURE DE L ELECRONIQUE NUMERIQUE Le schéma synoptique ci-dessous décrit les différentes étapes du traitement numérique
INTRODUCTION A L ELECTRONIQUE NUMERIQUE ECHANTILLONNAGE ET QUANTIFICATION I. ARCHITECTURE DE L ELECRONIQUE NUMERIQUE Le schéma synoptique ci-dessous décrit les différentes étapes du traitement numérique
Introduction au Data-Mining
 Introduction au Data-Mining Gilles Gasso, Stéphane Canu INSA Rouen -Département ASI Laboratoire LITIS 8 septembre 205. Ce cours est librement inspiré du cours DM de Alain Rakotomamonjy Gilles Gasso, Stéphane
Introduction au Data-Mining Gilles Gasso, Stéphane Canu INSA Rouen -Département ASI Laboratoire LITIS 8 septembre 205. Ce cours est librement inspiré du cours DM de Alain Rakotomamonjy Gilles Gasso, Stéphane
Approche par marquage pour l évaluation de la qualité d image dans les applications multimédias
 UNIVERSITÉ DU QUÉBEC EN OUTAOUAIS Département d informatique et d ingénierie Approche par marquage pour l évaluation de la qualité d image dans les applications multimédias MÉMOIRE (INF6021) pour l obtention
UNIVERSITÉ DU QUÉBEC EN OUTAOUAIS Département d informatique et d ingénierie Approche par marquage pour l évaluation de la qualité d image dans les applications multimédias MÉMOIRE (INF6021) pour l obtention
Echantillonnage Non uniforme
 Echantillonnage Non uniforme Marie CHABERT IRIT/INP-ENSEEIHT/ ENSEEIHT/TéSASA Patrice MICHEL et Bernard LACAZE TéSA 1 Plan Introduction Echantillonnage uniforme Echantillonnage irrégulier Comparaison Cas
Echantillonnage Non uniforme Marie CHABERT IRIT/INP-ENSEEIHT/ ENSEEIHT/TéSASA Patrice MICHEL et Bernard LACAZE TéSA 1 Plan Introduction Echantillonnage uniforme Echantillonnage irrégulier Comparaison Cas
de calibration Master 2: Calibration de modèles: présentation et simulation d
 Master 2: Calibration de modèles: présentation et simulation de quelques problèmes de calibration Plan de la présentation 1. Présentation de quelques modèles à calibrer 1a. Reconstruction d une courbe
Master 2: Calibration de modèles: présentation et simulation de quelques problèmes de calibration Plan de la présentation 1. Présentation de quelques modèles à calibrer 1a. Reconstruction d une courbe
Synthèse d'images I. Venceslas BIRI IGM Université de Marne La
 Synthèse d'images I Venceslas BIRI IGM Université de Marne La La synthèse d'images II. Rendu & Affichage 1. Introduction Venceslas BIRI IGM Université de Marne La Introduction Objectif Réaliser une image
Synthèse d'images I Venceslas BIRI IGM Université de Marne La La synthèse d'images II. Rendu & Affichage 1. Introduction Venceslas BIRI IGM Université de Marne La Introduction Objectif Réaliser une image
Recherche d'images par le contenu Application au monitoring Télévisuel à l'institut national de l'audiovisuel
 Recherche d'images par le contenu Application au monitoring Télévisuel à l'institut national de l'audiovisuel Alexis Joly [email protected] INRIA - IMEDIA Alexis Joly cours monitoring p. 1 Plan de l'exposé
Recherche d'images par le contenu Application au monitoring Télévisuel à l'institut national de l'audiovisuel Alexis Joly [email protected] INRIA - IMEDIA Alexis Joly cours monitoring p. 1 Plan de l'exposé
Optimisation de la compression fractale D images basée sur les réseaux de neurones
 Optimisation de la compression fractale D images basée sur les réseaux de neurones D r BOUKELIF Aoued Communication Networks,Architectures and Mutimedia laboratory University of S.B.A [email protected]
Optimisation de la compression fractale D images basée sur les réseaux de neurones D r BOUKELIF Aoued Communication Networks,Architectures and Mutimedia laboratory University of S.B.A [email protected]
Multimedia. Systèmes, Communications et Applications. Ahmed MEHAOUA
 Multimedia Systèmes, Communications et Applications Ahmed MEHAOUA Professeur - Laboratoire CRIP5 [email protected] Plan 1. Multimedia : principes et définitions 2. Algorithmes et normes
Multimedia Systèmes, Communications et Applications Ahmed MEHAOUA Professeur - Laboratoire CRIP5 [email protected] Plan 1. Multimedia : principes et définitions 2. Algorithmes et normes
Programmation linéaire
 1 Programmation linéaire 1. Le problème, un exemple. 2. Le cas b = 0 3. Théorème de dualité 4. L algorithme du simplexe 5. Problèmes équivalents 6. Complexité de l Algorithme 2 Position du problème Soit
1 Programmation linéaire 1. Le problème, un exemple. 2. Le cas b = 0 3. Théorème de dualité 4. L algorithme du simplexe 5. Problèmes équivalents 6. Complexité de l Algorithme 2 Position du problème Soit
Fonctions de plusieurs variables
 Maths MP Exercices Fonctions de plusieurs variables Les indications ne sont ici que pour être consultées après le T (pour les exercices non traités). Avant et pendant le T, tenez bon et n allez pas les
Maths MP Exercices Fonctions de plusieurs variables Les indications ne sont ici que pour être consultées après le T (pour les exercices non traités). Avant et pendant le T, tenez bon et n allez pas les
La classification automatique de données quantitatives
 La classification automatique de données quantitatives 1 Introduction Parmi les méthodes de statistique exploratoire multidimensionnelle, dont l objectif est d extraire d une masse de données des informations
La classification automatique de données quantitatives 1 Introduction Parmi les méthodes de statistique exploratoire multidimensionnelle, dont l objectif est d extraire d une masse de données des informations
Mesure agnostique de la qualité des images.
 Mesure agnostique de la qualité des images. Application en biométrie Christophe Charrier Université de Caen Basse-Normandie GREYC, UMR CNRS 6072 Caen, France 8 avril, 2013 C. Charrier NR-IQA 1 / 34 Sommaire
Mesure agnostique de la qualité des images. Application en biométrie Christophe Charrier Université de Caen Basse-Normandie GREYC, UMR CNRS 6072 Caen, France 8 avril, 2013 C. Charrier NR-IQA 1 / 34 Sommaire
Les Réseaux sans fils : IEEE 802.11. F. Nolot
 Les Réseaux sans fils : IEEE 802.11 F. Nolot 1 Les Réseaux sans fils : IEEE 802.11 Historique F. Nolot 2 Historique 1er norme publiée en 1997 Débit jusque 2 Mb/s En 1998, norme 802.11b, commercialement
Les Réseaux sans fils : IEEE 802.11 F. Nolot 1 Les Réseaux sans fils : IEEE 802.11 Historique F. Nolot 2 Historique 1er norme publiée en 1997 Débit jusque 2 Mb/s En 1998, norme 802.11b, commercialement
Notes du cours MTH1101 Calcul I Partie II: fonctions de plusieurs variables
 Notes du cours MTH1101 Calcul I Partie II: fonctions de plusieurs variables Guy Desaulniers Département de mathématiques et de génie industriel École Polytechnique de Montréal Automne 2014 Table des matières
Notes du cours MTH1101 Calcul I Partie II: fonctions de plusieurs variables Guy Desaulniers Département de mathématiques et de génie industriel École Polytechnique de Montréal Automne 2014 Table des matières
Communications immersives : Enjeux et perspectives
 Journée Futur et Ruptures Communications immersives : Enjeux et perspectives Béatrice Pesquet-Popescu Télécom ParisTech, Département TSI 5 mars 2015 Institut Mines-Télécom Tendances actuelles Plus, plus,
Journée Futur et Ruptures Communications immersives : Enjeux et perspectives Béatrice Pesquet-Popescu Télécom ParisTech, Département TSI 5 mars 2015 Institut Mines-Télécom Tendances actuelles Plus, plus,
Systèmes de communications numériques 2
 Systèmes de Communications Numériques Philippe Ciuciu, Christophe Vignat Laboratoire des Signaux et Systèmes CNRS SUPÉLEC UPS SUPÉLEC, Plateau de Moulon, 91192 Gif-sur-Yvette [email protected] Université
Systèmes de Communications Numériques Philippe Ciuciu, Christophe Vignat Laboratoire des Signaux et Systèmes CNRS SUPÉLEC UPS SUPÉLEC, Plateau de Moulon, 91192 Gif-sur-Yvette [email protected] Université
Introduction à l informatique temps réel Pierre-Yves Duval (cppm)
") Introduction à l informatique temps réel Pierre-Yves Duval (cppm) Ecole d informatique temps réel - La Londes les Maures 7-11 Octobre 2002 -Définition et problématique - Illustration par des exemples -Automatisme:
Introduction à l informatique temps réel Pierre-Yves Duval (cppm) Ecole d informatique temps réel - La Londes les Maures 7-11 Octobre 2002 -Définition et problématique - Illustration par des exemples -Automatisme:
MCMC et approximations en champ moyen pour les modèles de Markov
 MCMC et approximations en champ moyen pour les modèles de Markov Gersende FORT LTCI CNRS - TELECOM ParisTech En collaboration avec Florence FORBES (Projet MISTIS, INRIA Rhône-Alpes). Basé sur l article:
MCMC et approximations en champ moyen pour les modèles de Markov Gersende FORT LTCI CNRS - TELECOM ParisTech En collaboration avec Florence FORBES (Projet MISTIS, INRIA Rhône-Alpes). Basé sur l article:
J AUVRAY Systèmes Electroniques TRANSMISSION DES SIGNAUX NUMERIQUES : SIGNAUX EN BANDE DE BASE
 RANSMISSION DES SIGNAUX NUMERIQUES : SIGNAUX EN BANDE DE BASE Un message numérique est une suite de nombres que l on considérera dans un premier temps comme indépendants.ils sont codés le plus souvent
RANSMISSION DES SIGNAUX NUMERIQUES : SIGNAUX EN BANDE DE BASE Un message numérique est une suite de nombres que l on considérera dans un premier temps comme indépendants.ils sont codés le plus souvent
données en connaissance et en actions?
 1 Partie 2 : Présentation de la plateforme SPSS Modeler : Comment transformer vos données en connaissance et en actions? SPSS Modeler : l atelier de data mining Large gamme de techniques d analyse (algorithmes)
1 Partie 2 : Présentation de la plateforme SPSS Modeler : Comment transformer vos données en connaissance et en actions? SPSS Modeler : l atelier de data mining Large gamme de techniques d analyse (algorithmes)
Object Removal by Exemplar-Based Inpainting
 Object Removal by Exemplar-Based Inpainting Kévin Polisano A partir d un article de A. Criminisi, P. Pérez & H. K. Toyama 14/02/2013 Kévin Polisano Object Removal by Exemplar-Based Inpainting 14/02/2013
Object Removal by Exemplar-Based Inpainting Kévin Polisano A partir d un article de A. Criminisi, P. Pérez & H. K. Toyama 14/02/2013 Kévin Polisano Object Removal by Exemplar-Based Inpainting 14/02/2013
Projet de Traitement du Signal Segmentation d images SAR
 Projet de Traitement du Signal Segmentation d images SAR Introduction En analyse d images, la segmentation est une étape essentielle, préliminaire à des traitements de haut niveau tels que la classification,
Projet de Traitement du Signal Segmentation d images SAR Introduction En analyse d images, la segmentation est une étape essentielle, préliminaire à des traitements de haut niveau tels que la classification,
Recherche De Coalescences Binaires Étalonnage Du Détecteur
 Recherche De Coalescences Binaires Étalonnage Du Détecteur Fabrice Beauville Journées Jeunes Chercheurs 18/12/2003 Les Coalescences Binaires & VIRGO Système binaire d objets compacts (étoiles à neutrons,
Recherche De Coalescences Binaires Étalonnage Du Détecteur Fabrice Beauville Journées Jeunes Chercheurs 18/12/2003 Les Coalescences Binaires & VIRGO Système binaire d objets compacts (étoiles à neutrons,
Erratum de MÉCANIQUE, 6ème édition. Introduction Page xxi (milieu de page) G = 6, 672 59 10 11 m 3 kg 1 s 2
 G = 6, 672 59 10 11 m 3 kg 1 s 2") Introduction Page xxi (milieu de page) G = 6, 672 59 1 11 m 3 kg 1 s 2 Erratum de MÉCANIQUE, 6ème édition Page xxv (dernier tiers de page) le terme de Coriolis est supérieur à 1% du poids) Chapitre 1 Page
Introduction Page xxi (milieu de page) G = 6, 672 59 1 11 m 3 kg 1 s 2 Erratum de MÉCANIQUE, 6ème édition Page xxv (dernier tiers de page) le terme de Coriolis est supérieur à 1% du poids) Chapitre 1 Page
Analyse des trajectoires acceptables en approche de virage assistance aux conducteurs
 DIVAS Analyse des trajectoires acceptables en approche de virage assistance aux conducteurs N 3.C.1 Décembre 2008 Projet financé par l Agence Nationale de la Recherche Responsable : S. Espié Projet ANR
DIVAS Analyse des trajectoires acceptables en approche de virage assistance aux conducteurs N 3.C.1 Décembre 2008 Projet financé par l Agence Nationale de la Recherche Responsable : S. Espié Projet ANR
Les algorithmes de base du graphisme
 Les algorithmes de base du graphisme Table des matières 1 Traçage 2 1.1 Segments de droites......................... 2 1.1.1 Algorithmes simples.................... 3 1.1.2 Algorithmes de Bresenham (1965).............
Les algorithmes de base du graphisme Table des matières 1 Traçage 2 1.1 Segments de droites......................... 2 1.1.1 Algorithmes simples.................... 3 1.1.2 Algorithmes de Bresenham (1965).............
TP Modulation Démodulation BPSK
 I- INTRODUCTION : TP Modulation Démodulation BPSK La modulation BPSK est une modulation de phase (Phase Shift Keying = saut discret de phase) par signal numérique binaire (Binary). La phase d une porteuse
I- INTRODUCTION : TP Modulation Démodulation BPSK La modulation BPSK est une modulation de phase (Phase Shift Keying = saut discret de phase) par signal numérique binaire (Binary). La phase d une porteuse
I. TRANSMISSION DE DONNEES
 TD I. TRANSMISSION DE DONNEES 1. QU'EST-CE QU'UN CANAL DE TRANSMISSION? 1.1 Rappels Une ligne de transmission est une liaison entre les deux machines. On désigne généralement par le terme émetteur la machine
TD I. TRANSMISSION DE DONNEES 1. QU'EST-CE QU'UN CANAL DE TRANSMISSION? 1.1 Rappels Une ligne de transmission est une liaison entre les deux machines. On désigne généralement par le terme émetteur la machine
RIE LE RENDU THEO. 2 e trim ÉTAPE DE FINITION BOÎTE DE DIALOGUE. remarques
 THEO RIE LE RENDU 2 e trim JANVIER 2008 remarques ÉTAPE DE FINITION Le rendu est la partie finale de notre création, à ce moment on décide que notre 3D est finie et l on en réalise une image 2D Cette image
THEO RIE LE RENDU 2 e trim JANVIER 2008 remarques ÉTAPE DE FINITION Le rendu est la partie finale de notre création, à ce moment on décide que notre 3D est finie et l on en réalise une image 2D Cette image
Algorithme des fourmis appliqué à la détection et au suivi de contours dans une image
 IN52-IN54 A2008 Algorithme des fourmis appliqué à la détection et au suivi de contours dans une image Etudiants : Nicolas MONNERET Alexandre HAFFNER Sébastien DE MELO Responsable : Franck GECHTER Sommaire
IN52-IN54 A2008 Algorithme des fourmis appliqué à la détection et au suivi de contours dans une image Etudiants : Nicolas MONNERET Alexandre HAFFNER Sébastien DE MELO Responsable : Franck GECHTER Sommaire
Data Mining. Vincent Augusto 2012-2013. École Nationale Supérieure des Mines de Saint-Étienne. Data Mining. V. Augusto.
 des des Data Mining Vincent Augusto École Nationale Supérieure des Mines de Saint-Étienne 2012-2013 1/65 des des 1 2 des des 3 4 Post-traitement 5 représentation : 6 2/65 des des Définition générale Le
des des Data Mining Vincent Augusto École Nationale Supérieure des Mines de Saint-Étienne 2012-2013 1/65 des des 1 2 des des 3 4 Post-traitement 5 représentation : 6 2/65 des des Définition générale Le
Compression et Transmission des Signaux. Samson LASAULCE Laboratoire des Signaux et Systèmes, Gif/Yvette
 Compression et Transmission des Signaux Samson LASAULCE Laboratoire des Signaux et Systèmes, Gif/Yvette 1 De Shannon à Mac Donalds Mac Donalds 1955 Claude Elwood Shannon 1916 2001 Monsieur X 1951 2 Où
Compression et Transmission des Signaux Samson LASAULCE Laboratoire des Signaux et Systèmes, Gif/Yvette 1 De Shannon à Mac Donalds Mac Donalds 1955 Claude Elwood Shannon 1916 2001 Monsieur X 1951 2 Où
TP SIN Traitement d image
 TP SIN Traitement d image Pré requis (l élève doit savoir): - Utiliser un ordinateur Objectif terminale : L élève doit être capable de reconnaître un format d image et d expliquer les différents types
TP SIN Traitement d image Pré requis (l élève doit savoir): - Utiliser un ordinateur Objectif terminale : L élève doit être capable de reconnaître un format d image et d expliquer les différents types
MOTORISATION DIRECTDRIVE POUR NOS TELESCOPES. Par C.CAVADORE ALCOR-SYSTEM WETAL 2013 10 Nov
 1 MOTORISATION DIRECTDRIVE POUR NOS TELESCOPES Par C.CAVADORE ALCOR-SYSTEM WETAL 2013 10 Nov Pourquoi motoriser un télescope? 2 Pour compenser le mouvement de la terre (15 /h) Observation visuelle Les
1 MOTORISATION DIRECTDRIVE POUR NOS TELESCOPES Par C.CAVADORE ALCOR-SYSTEM WETAL 2013 10 Nov Pourquoi motoriser un télescope? 2 Pour compenser le mouvement de la terre (15 /h) Observation visuelle Les
Technique de codage des formes d'ondes
 Technique de codage des formes d'ondes Contenu Introduction Conditions préalables Conditions requises Composants utilisés Conventions Modulation par impulsions et codage Filtrage Échantillon Numérisez
Technique de codage des formes d'ondes Contenu Introduction Conditions préalables Conditions requises Composants utilisés Conventions Modulation par impulsions et codage Filtrage Échantillon Numérisez
OM 1 Outils mathématiques : fonction de plusieurs variables
 Outils mathématiques : fonction de plusieurs variables PCSI 2013 2014 Certaines partie de ce chapitre ne seront utiles qu à partir de l année prochaine, mais une grande partie nous servira dès cette année.
Outils mathématiques : fonction de plusieurs variables PCSI 2013 2014 Certaines partie de ce chapitre ne seront utiles qu à partir de l année prochaine, mais une grande partie nous servira dès cette année.
TP : Gestion d une image au format PGM
 TP : Gestion d une image au format PGM Objectif : L objectif du sujet est de créer une classe de manipulation d images au format PGM (Portable GreyMap), et de programmer des opérations relativement simples
TP : Gestion d une image au format PGM Objectif : L objectif du sujet est de créer une classe de manipulation d images au format PGM (Portable GreyMap), et de programmer des opérations relativement simples
Bandes Critiques et Masquage
 Bandes Critiques et Masquage A. Almeida Licence Pro Acoustique et Vibrations Octobre 2012 Au Menu Au programme 1 Observations du masquage 5 Application du masquage 2 Conséquences du Masquage 3 Interprétation
Bandes Critiques et Masquage A. Almeida Licence Pro Acoustique et Vibrations Octobre 2012 Au Menu Au programme 1 Observations du masquage 5 Application du masquage 2 Conséquences du Masquage 3 Interprétation
Fête de la science Initiation au traitement des images
 Fête de la science Initiation au traitement des images Détection automatique de plaques minéralogiques à partir d'un téléphone portable et atelier propose de créer un programme informatique pour un téléphone
Fête de la science Initiation au traitement des images Détection automatique de plaques minéralogiques à partir d'un téléphone portable et atelier propose de créer un programme informatique pour un téléphone
Chapitre 13 Numérisation de l information
 DERNIÈRE IMPRESSION LE 2 septembre 2013 à 17:33 Chapitre 13 Numérisation de l information Table des matières 1 Transmission des informations 2 2 La numérisation 2 2.1 L échantillonage..............................
DERNIÈRE IMPRESSION LE 2 septembre 2013 à 17:33 Chapitre 13 Numérisation de l information Table des matières 1 Transmission des informations 2 2 La numérisation 2 2.1 L échantillonage..............................
Exemple d application en CFD : Coefficient de traînée d un cylindre
 Exemple d application en CFD : Coefficient de traînée d un cylindre 1 Démarche générale Avec Gambit Création d une géométrie Maillage Définition des conditions aux limites Avec Fluent 3D Choix des équations
Exemple d application en CFD : Coefficient de traînée d un cylindre 1 Démarche générale Avec Gambit Création d une géométrie Maillage Définition des conditions aux limites Avec Fluent 3D Choix des équations
Mode d emploi ALTO MONITOR PROCESSEUR D ÉCOUTE. www.altoproaudio.com Version 1.0 Juillet 2003 Français
 Mode d emploi ALTO MONITOR PROCESSEUR D ÉCOUTE www.altoproaudio.com Version 1.0 Juillet 2003 Français SOMMAIRE 1. INTRODUCTION................................................................... 4 2. FONCTIONNALITÉS................................................................
Mode d emploi ALTO MONITOR PROCESSEUR D ÉCOUTE www.altoproaudio.com Version 1.0 Juillet 2003 Français SOMMAIRE 1. INTRODUCTION................................................................... 4 2. FONCTIONNALITÉS................................................................
Chapitre 0 Introduction à la cinématique
 Chapitre 0 Introduction à la cinématique Plan Vitesse, accélération Coordonnées polaires Exercices corrigés Vitesse, Accélération La cinématique est l étude du mouvement Elle suppose donc l existence à
Chapitre 0 Introduction à la cinématique Plan Vitesse, accélération Coordonnées polaires Exercices corrigés Vitesse, Accélération La cinématique est l étude du mouvement Elle suppose donc l existence à
Cours de numérisation sur Epson Perfection
 Cours de numérisation sur Epson Perfection 1- Vérifiez la propreté de la vitre, placez l original sur celle-ci. À savoir, on peut numériser des transparents avec ce scanner ; il a un capteur CCD dans le
Cours de numérisation sur Epson Perfection 1- Vérifiez la propreté de la vitre, placez l original sur celle-ci. À savoir, on peut numériser des transparents avec ce scanner ; il a un capteur CCD dans le
Sujet de thèse : Suivi d objets en mouvement dans une séquence vidéo
 Université PARIS DESCARTES Centre universitaire des Saints-Pères UFR DE MATHÉMATIQUES ET INFORMATIQUE Thèse présentée pour l obtention du grade de Docteur de l université PARIS DESCARTES Spécialité : Informatique
Université PARIS DESCARTES Centre universitaire des Saints-Pères UFR DE MATHÉMATIQUES ET INFORMATIQUE Thèse présentée pour l obtention du grade de Docteur de l université PARIS DESCARTES Spécialité : Informatique
PLATE-FORME COMMUNE UNE SOLUTION LOGICIELLE UNIQUE POUR AMÉLIORER LA PRODUCTIVITÉ. Logiciel DIRECTVIEW V5 pour CR et DR
 Logiciel DIRECTVIEW V5 pour CR et DR UNE SOLUTION LOGICIELLE UNIQUE POUR AMÉLIORER LA PRODUCTIVITÉ Vous pouvez faire confiance aux systèmes CR et DR de Carestream pour leur qualité de prise d images. Maintenant
Logiciel DIRECTVIEW V5 pour CR et DR UNE SOLUTION LOGICIELLE UNIQUE POUR AMÉLIORER LA PRODUCTIVITÉ Vous pouvez faire confiance aux systèmes CR et DR de Carestream pour leur qualité de prise d images. Maintenant
Interception des signaux issus de communications MIMO
 Interception des signaux issus de communications MIMO par Vincent Choqueuse Laboratoire E 3 I 2, EA 3876, ENSIETA Laboratoire LabSTICC, UMR CNRS 3192, UBO 26 novembre 2008 Interception des signaux issus
Interception des signaux issus de communications MIMO par Vincent Choqueuse Laboratoire E 3 I 2, EA 3876, ENSIETA Laboratoire LabSTICC, UMR CNRS 3192, UBO 26 novembre 2008 Interception des signaux issus
Agrégation des portefeuilles de contrats d assurance vie
 Agrégation des portefeuilles de contrats d assurance vie Est-il optimal de regrouper les contrats en fonction de l âge, du genre, et de l ancienneté des assurés? Pierre-O. Goffard Université d été de l
Agrégation des portefeuilles de contrats d assurance vie Est-il optimal de regrouper les contrats en fonction de l âge, du genre, et de l ancienneté des assurés? Pierre-O. Goffard Université d été de l
Glossaire technique Veditec
 Glossaire technique Veditec 3D/2D DNR (digital noise réduction) La technologie DNR est un système de réduction numérique de bruit ayant pour but de réduire le bruit sur l image. Elle permet d obtenir des
Glossaire technique Veditec 3D/2D DNR (digital noise réduction) La technologie DNR est un système de réduction numérique de bruit ayant pour but de réduire le bruit sur l image. Elle permet d obtenir des
Théorie et Codage de l Information (IF01) exercices 2013-2014. Paul Honeine Université de technologie de Troyes France
 exercices 2013-2014. Paul Honeine Université de technologie de Troyes France") Théorie et Codage de l Information (IF01) exercices 2013-2014 Paul Honeine Université de technologie de Troyes France TD-1 Rappels de calculs de probabilités Exercice 1. On dispose d un jeu de 52 cartes
Théorie et Codage de l Information (IF01) exercices 2013-2014 Paul Honeine Université de technologie de Troyes France TD-1 Rappels de calculs de probabilités Exercice 1. On dispose d un jeu de 52 cartes
Resolution limit in community detection
 Introduction Plan 2006 Introduction Plan Introduction Introduction Plan Introduction Point de départ : un graphe et des sous-graphes. But : quantifier le fait que les sous-graphes choisis sont des modules.
Introduction Plan 2006 Introduction Plan Introduction Introduction Plan Introduction Point de départ : un graphe et des sous-graphes. But : quantifier le fait que les sous-graphes choisis sont des modules.
Systèmes de transmission
 Systèmes de transmission Conception d une transmission série FABRE Maxime 2012 Introduction La transmission de données désigne le transport de quelque sorte d'information que ce soit, d'un endroit à un
Systèmes de transmission Conception d une transmission série FABRE Maxime 2012 Introduction La transmission de données désigne le transport de quelque sorte d'information que ce soit, d'un endroit à un
Sensibilité (bas niveaux de lumière, hauts niveaux de lumière) Spectre de sensibilité : visible (400-700 nm) mais aussi IR, UV, RX
 Spectre de sensibilité : visible (400-700 nm) mais aussi IR, UV, RX") Les capteurs pour l imagerie en biologie i Marc Moreau Catherine Leclerc Centre de Biologie du développement UMR 5547 et GDR E n 731 Toulouse BC02 mars 2013 Les différents système d imagerie à base de
Les capteurs pour l imagerie en biologie i Marc Moreau Catherine Leclerc Centre de Biologie du développement UMR 5547 et GDR E n 731 Toulouse BC02 mars 2013 Les différents système d imagerie à base de
Projet de traitement d'image - SI 381 reconstitution 3D d'intérieur à partir de photographies
 Projet de traitement d'image - SI 381 reconstitution 3D d'intérieur à partir de photographies Régis Boulet Charlie Demené Alexis Guyot Balthazar Neveu Guillaume Tartavel Sommaire Sommaire... 1 Structure
Projet de traitement d'image - SI 381 reconstitution 3D d'intérieur à partir de photographies Régis Boulet Charlie Demené Alexis Guyot Balthazar Neveu Guillaume Tartavel Sommaire Sommaire... 1 Structure
Chapitre 18 : Transmettre et stocker de l information
 Chapitre 18 : Transmettre et stocker de l information Connaissances et compétences : - Identifier les éléments d une chaîne de transmission d informations. - Recueillir et exploiter des informations concernant
Chapitre 18 : Transmettre et stocker de l information Connaissances et compétences : - Identifier les éléments d une chaîne de transmission d informations. - Recueillir et exploiter des informations concernant
TS 35 Numériser. Activité introductive - Exercice et démarche expérimentale en fin d activité Notions et contenus du programme de Terminale S
 FICHE Fiche à destination des enseignants TS 35 Numériser Type d'activité Activité introductive - Exercice et démarche expérimentale en fin d activité Notions et contenus du programme de Terminale S Compétences
FICHE Fiche à destination des enseignants TS 35 Numériser Type d'activité Activité introductive - Exercice et démarche expérimentale en fin d activité Notions et contenus du programme de Terminale S Compétences
document proposé sur le site «Sciences Physiques en BTS» : http://nicole.cortial.net BTS AVA 2015
 BT V 2015 (envoyé par Frédéric COTTI - Professeur d Electrotechnique au Lycée Régional La Floride Marseille) Document 1 - Etiquette énergie Partie 1 : Voiture à faible consommation - Une étiquette pour
BT V 2015 (envoyé par Frédéric COTTI - Professeur d Electrotechnique au Lycée Régional La Floride Marseille) Document 1 - Etiquette énergie Partie 1 : Voiture à faible consommation - Une étiquette pour
Coup de Projecteur sur les Réseaux de Neurones
 Coup de Projecteur sur les Réseaux de Neurones Les réseaux de neurones peuvent être utilisés pour des problèmes de prévision ou de classification. La représentation la plus populaire est le réseau multicouche
Coup de Projecteur sur les Réseaux de Neurones Les réseaux de neurones peuvent être utilisés pour des problèmes de prévision ou de classification. La représentation la plus populaire est le réseau multicouche
LA NOTATION STATISTIQUE DES EMPRUNTEURS OU «SCORING»
 LA NOTATION STATISTIQUE DES EMPRUNTEURS OU «SCORING» Gilbert Saporta Professeur de Statistique Appliquée Conservatoire National des Arts et Métiers Dans leur quasi totalité, les banques et organismes financiers
LA NOTATION STATISTIQUE DES EMPRUNTEURS OU «SCORING» Gilbert Saporta Professeur de Statistique Appliquée Conservatoire National des Arts et Métiers Dans leur quasi totalité, les banques et organismes financiers
Fiche technique CPU 314SC/DPM (314-6CG13)
") Fiche technique CPU 314SC/DPM (3146CG13) Données techniques N de commande 3146CG13 Type CPU 314SC/DPM Information générale Note Caractéristiques SPEEDBus Technologie SPEED7 24 x DI, 16 x DO, 8 x DIO, 4
Fiche technique CPU 314SC/DPM (3146CG13) Données techniques N de commande 3146CG13 Type CPU 314SC/DPM Information générale Note Caractéristiques SPEEDBus Technologie SPEED7 24 x DI, 16 x DO, 8 x DIO, 4
Continuité et dérivabilité d une fonction
 DERNIÈRE IMPRESSIN LE 7 novembre 014 à 10:3 Continuité et dérivabilité d une fonction Table des matières 1 Continuité d une fonction 1.1 Limite finie en un point.......................... 1. Continuité
DERNIÈRE IMPRESSIN LE 7 novembre 014 à 10:3 Continuité et dérivabilité d une fonction Table des matières 1 Continuité d une fonction 1.1 Limite finie en un point.......................... 1. Continuité
Algorithmique des Systèmes Répartis Protocoles de Communications
 Algorithmique des Systèmes Répartis Protocoles de Communications Master Informatique Dominique Méry Université de Lorraine 1 er avril 2014 1 / 70 Plan Communications entre processus Observation et modélisation
Algorithmique des Systèmes Répartis Protocoles de Communications Master Informatique Dominique Méry Université de Lorraine 1 er avril 2014 1 / 70 Plan Communications entre processus Observation et modélisation
Notes du cours MTH1101N Calcul I Partie II: fonctions de plusieurs variables
 Notes du cours MTH1101N Calcul I Partie II: fonctions de plusieurs variables Fausto Errico Département de mathématiques et de génie industriel École Polytechnique de Montréal Automne 2012 Table des matières
Notes du cours MTH1101N Calcul I Partie II: fonctions de plusieurs variables Fausto Errico Département de mathématiques et de génie industriel École Polytechnique de Montréal Automne 2012 Table des matières
Chapitre 2 : Caractéristiques du mouvement d un solide
 Chapitre 2 : Caractéristiques du mouvement d un solide I Rappels : Référentiel : Le mouvement d un corps est décris par rapport à un corps de référence et dépend du choix de ce corps. Ce corps de référence
Chapitre 2 : Caractéristiques du mouvement d un solide I Rappels : Référentiel : Le mouvement d un corps est décris par rapport à un corps de référence et dépend du choix de ce corps. Ce corps de référence
Julien MATHEVET Alexandre BOISSY GSID 4. Rapport RE09. Load Balancing et migration
 Julien MATHEVET Alexandre BOISSY GSID 4 Rapport Load Balancing et migration Printemps 2001 SOMMAIRE INTRODUCTION... 3 SYNTHESE CONCERNANT LE LOAD BALANCING ET LA MIGRATION... 4 POURQUOI FAIRE DU LOAD BALANCING?...
Julien MATHEVET Alexandre BOISSY GSID 4 Rapport Load Balancing et migration Printemps 2001 SOMMAIRE INTRODUCTION... 3 SYNTHESE CONCERNANT LE LOAD BALANCING ET LA MIGRATION... 4 POURQUOI FAIRE DU LOAD BALANCING?...
UE 503 L3 MIAGE. Initiation Réseau et Programmation Web La couche physique. A. Belaïd
 UE 503 L3 MIAGE Initiation Réseau et Programmation Web La couche physique A. Belaïd [email protected] http://www.loria.fr/~abelaid/ Année Universitaire 2011/2012 2 Le Modèle OSI La couche physique ou le
UE 503 L3 MIAGE Initiation Réseau et Programmation Web La couche physique A. Belaïd [email protected] http://www.loria.fr/~abelaid/ Année Universitaire 2011/2012 2 Le Modèle OSI La couche physique ou le
Chapitre I La fonction transmission
 Chapitre I La fonction transmission 1. Terminologies 1.1 Mode guidé / non guidé Le signal est le vecteur de l information à transmettre. La transmission s effectue entre un émetteur et un récepteur reliés
Chapitre I La fonction transmission 1. Terminologies 1.1 Mode guidé / non guidé Le signal est le vecteur de l information à transmettre. La transmission s effectue entre un émetteur et un récepteur reliés
Vision industrielle et télédétection - Détection d ellipses. Guillaume Martinez 17 décembre 2007
 Vision industrielle et télédétection - Détection d ellipses Guillaume Martinez 17 décembre 2007 1 Table des matières 1 Le projet 3 1.1 Objectif................................ 3 1.2 Les choix techniques.........................
Vision industrielle et télédétection - Détection d ellipses Guillaume Martinez 17 décembre 2007 1 Table des matières 1 Le projet 3 1.1 Objectif................................ 3 1.2 Les choix techniques.........................
Détection des points d intérêt et Segmentation des images RGB-D. Présentée par : Bilal Tawbe. Semaine de la recherche de l UQO
 Détection des points d intérêt et Segmentation des images RGB-D Présentée par : Bilal Tawbe Semaine de la recherche de l UQO 25 Mars 2015 1. Introduction Les méthodes de détection de points d intérêt ont
Détection des points d intérêt et Segmentation des images RGB-D Présentée par : Bilal Tawbe Semaine de la recherche de l UQO 25 Mars 2015 1. Introduction Les méthodes de détection de points d intérêt ont
Contexte. Pour cela, elles doivent être très compliquées, c est-à-dire elles doivent être très différentes des fonctions simples,
 Non-linéarité Contexte Pour permettre aux algorithmes de cryptographie d être sûrs, les fonctions booléennes qu ils utilisent ne doivent pas être inversées facilement. Pour cela, elles doivent être très
Non-linéarité Contexte Pour permettre aux algorithmes de cryptographie d être sûrs, les fonctions booléennes qu ils utilisent ne doivent pas être inversées facilement. Pour cela, elles doivent être très
Comparatif entre Matrox RT.X2 et Adobe Premiere Pro CS3 (logiciel seul)
") Comparatif entre et Adobe Premiere Pro CS3 (logiciel seul) offre la puissance de montage en temps réel et les outils de productivité supplémentaires dont vous avez besoin pour tirer pleinement parti d'adobe
Comparatif entre et Adobe Premiere Pro CS3 (logiciel seul) offre la puissance de montage en temps réel et les outils de productivité supplémentaires dont vous avez besoin pour tirer pleinement parti d'adobe
Reconstruction de bâtiments en 3D à partir de nuages de points LIDAR
 Reconstruction de bâtiments en 3D à partir de nuages de points LIDAR Mickaël Bergem 25 juin 2014 Maillages et applications 1 Table des matières Introduction 3 1 La modélisation numérique de milieux urbains
Reconstruction de bâtiments en 3D à partir de nuages de points LIDAR Mickaël Bergem 25 juin 2014 Maillages et applications 1 Table des matières Introduction 3 1 La modélisation numérique de milieux urbains