Fusion multimodale pour la cartographie sous-marine
|
|
|
- Henriette Auger
- il y a 10 ans
- Total affichages :
Transcription


1 Fusion multimodale pour la cartographie sous-marine JOURNÉE ARCHÉOLOGIE SOUS MARINE ET ROBOTIQUE GT2 14 MAI 2013, DRASSM, MARSEILLE Jean Triboulet - Arnaud Méline - Bruno Jouvencel Université Montpellier 2 Laboratoire d informatique, Robotique et Microélectronique de Montpellier (LIRMM)

2 Sommaire I. Introduction II. Reconstruction 3D I. Calibrage de la caméra II. Détection et appariement des points d intérêts III. Filtrage et robustesse aux bruits sous-marins IV. Reconstruction euclidienne texturée III. Carte acoustique IV. Fusion des cartes V. Conclusion 2

3 Introduction Réalisation de la carte globale Création de la carte acoustique à partir d un bateau en surface, d un véhicule de surface autonome (ASV) ou d un véhicule autonome sousmarin (AUV) Choix du véhicule en fonction de la profondeur et de l accessibilité de la zone Modélisation 3D locale du fond marin Avec une caméra ou un système stéréo Porté par un plongeur ou un AUV/ROV Carte 3D locale Carte globale acoustique 3

4 Introduction 3 axes d étude : Reconstruction 3D à partir d une caméra ou d une paire stéréo Création de la carte acoustique globale Fusion multimodale / recalage des différentes cartes (acoustique et vision) 4

5 Introduction Expérimentations Prises de photos et vidéos en haute résolution des objets Immersion d objets connus à 15 mètres de profondeur en mer - statue d un buste de femme, statue d un poisson, mire de calibrage Numérisation 3D des objets par un scanner 3D Minolta Système stéréoscopique Première plongée Deuxième plongée Numérisation 3D 5

6 Introduction Création d une bibliothèque d images et de vidéos Expérimentations dans différents milieux En mer, en fleuve, en étang salé et en bassin Caractéristiques et bruits différents dans chaque milieu Prises de photos sur divers sites archéologiques sous-marins Cliché en mer Cliché en fleuve Cliché en étang salé 6

7 Introduction Contraintes dues au milieu sous marin Présence de particules en suspension (turbidité) Provoque des phénomènes de réfraction et réflexion des rayons lumineux [Meeteen1999] Appariation de flou [Bazeille2008] et de speckle [Adrian2010] sur les images Absorption de l énergie lumineuse Disparition de certaines couleurs en fonction de la distance séparant l objet de la source lumineuse Réfraction dû au changement de milieu Modification de la focale apparente Modification de l indice optique de l eau Varie selon la température, la pression (donc la profondeur), la salinité et la longueur d onde du rayon lumineux 7
, la salinité et la longueur d onde du rayon")
8 Reconstruction 3D Calibrage de la caméra Détection des points d intérêts Mise en correspondance des points Filtrage et robustesse aux bruits sousmarins Reconstruction euclidienne texturée 8

9 Reconstruction 3D Problématique Images ou Vidéos Problèmes majeurs rencontrés Aucune connaissance de la scène observée Mouvement de la caméra inconnu Bruit introduit par la milieu sous-marin Reconstruction 3D euclidienne A partir d images successives de la vidéo Méthode de Hartley et Zisserman 5 étapes différentes Reconstruction à un facteur d échelle près Calibrage de la caméra Reconstruction Euclidienne Détection de points d intérêts Appariements des points d intérêts Suppression des mauvais appariements (outliers) Modèle 3D 9
 Modèle")
10 Calibrage et modèle de la caméra Problématique Problèmes majeurs rencontrés sous l eau Variation de l indice de réfraction Modification de la distance focale apparente Changement des paramètres internes du modèle de la caméra Hypothèse : compenser les paramètres qui changent l indice de réfraction dans le modèle de la caméra 10


11 Calibrage et modèle de la caméra Modèle de caméra Pinhole Modèle classique utilisé en vision, permet de passer entre le repère monde et le repère image Contient 4 repères La transformation T 1 représente les paramètres extrinsèques La transformation P représente les paramètres intrinsèques Ajout de la distorsion radiale introduite par l eau et les hublots x x x k r k r ˆn n 1 2 Modèle de la camera y y y k r k r ˆn n 1 2 Journée Archéologie Modèle Sous Marine de la caméra et et représentation des modèles 11

12 Calibrage et modèle de la caméra Calibrage de la caméra Calibrage par la Méthode de Zhang Utilisation d une simple mire plane de calibrage Aucune autre information nécessaire Détermine la distorsion radiale Calibrage en surface et en mer, avec et sans caisson étanche Le caisson étanche n a aucune influence sur les paramètres intrinsèques (surface) Les paramètres de distorsion radiale changent de signes entre un calibrage dans l air (-0.15) et dans l eau de mer (+0.12) La distance focale varie autour de 1.3 entre l air et l eau douce [Lavest 2000] Dans l eau de mer elle est généralement plus élevée : environ 1.4 dans notre cas Les paramètres de distorsion sont directement liés à l environnement (air/eau) 12

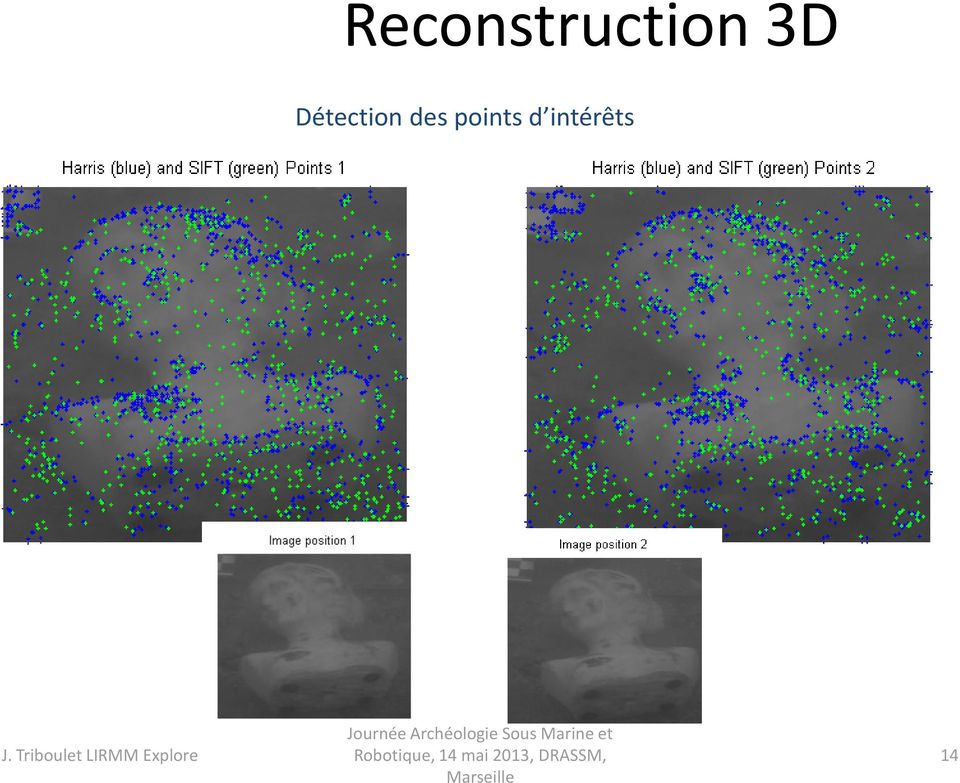
13 Reconstruction 3D Détection des points d intérêts Utilisation de la méthode de Harris Points détectés proches des coins Points détectés caractéristiques de la géométrie d objet observé Utilisation de l algorithme de SIFT Méthode reconnue comme étant une des meilleures Points répartis sur toute l image Critère de choix différents de Harris (augmentation du nombre total de points) 13



14 Reconstruction 3D Détection des points d intérêts 14
15 Reconstruction 3D Appariement des points d intérêts Méthodes d appariement Corrélation pour les points de Harris Invariants locaux pour SIFT Utilisation de l algorithme de RANSAC pour supprimer les faux appariements («outliers») Harris donne de meilleurs résultats que SIFT 40% de tout les points sont appariés avec Harris et seulement 20% avec SIFT Les outliers représentent 4% des points appariés pour les deux méthodes 15

16 Reconstruction 3D Mouvement déterminé à partir des points de Harris et de SIFT avec et sans RANSAC 16

17 Bruits sous-marins et filtrage Identification des bruits et création des filtres Création des filtres modélisant les différents bruits Modélisation des bruits un par un Identification et quantification des bruits sous-marins Absorption de l énergie lumineuse - Disparition de certaines couleurs (histogramme de couleurs) Présence de particules en suspension - Appariation de flou [Bazeille2008] et d un bruit de speckle [Adrian2010] (histogramme de la variance locale) Image sous-marine Image filtre couleur Image sous-marine Image filtre gauss + speckle 17
![de certaines couleurs (histogramme de couleurs) Présence de particules en suspension - Appariation de flou [Bazeille2008] et d un bruit de](/docs-images/42/14963745/images/page_17.jpg "speckle [Adrian2010] (histogramme de la variance locale) Image sous-marine Image filtre couleur Image sous-marine Image filtre gauss +")
18 Bruits sous-marins et filtrage Robustesse des méthodes aux bruits sous-marins Test de la robustesse des deux méthodes dans 4 milieux Dans l air, une piscine, en mer et mer simulée Air Piscine Mer Mer simulée Harris & NCC ++ (24.8%) ++ (26.1%) ++ (25.1%) ++ (25.7%) SIFT +++ (35.5%) ++ (28.4%) - (15.2%) - (14.1%) SIFT n est pas robuste aux bruits présent en mer et mer simulée Harris reste stable et robuste aux différents bruits 18
 SIFT n est pas robuste aux bruits présent en mer et mer simulée Harris reste stable et robuste aux")
19 Bruits sous-marins et filtrage Identification du bruit mettant SIFT en échec Test de la robustesse de SIFT pour chaque bruit composant le filtre sous-marin Harris & NCC Aucun Couleur Flou Speckle Flou & Speckle Tous 24,8% 24,1% 24,5% 23,9% 24,6% 25,7% SIFT 35,5% 35,7% 36,4% 6.2% 14,5% 14,1% Comme on pouvait le prévoir Harris reste robuste aux différents bruits SIFT n est pas robuste aux bruits de speckle 19

20 Reconstruction 3D Méthode de reconstruction Reconstruction euclidienne Calcul du déplacement entre 2 images à partir du calibrage et des couples de points formés Projection des points dans l espace 3D Suppression des points aberrants Maillage de la structure par triangulation de Delaunay 2D Placage des textures sur les triangles reprojetés en 3D Image 1 Image Journée 2 Archéologie Sous Marine et 20

21 Reconstruction 3D Reconstruction euclidienne Erreur de reconstruction d environ 3% en milieu fortement turbide Erreur de reconstruction de 0,5% à 1% dans des conditions correctes Cliché de gauche Cliché de droite 21
 Création de la carte 3D à partir d un seul passage sur zone Lit du Rhône")
22 Carte acoustique Carte acoustique 3D Utilisation d un sonar multifaisceaux Lit du Rhône (partie centrale) Création de la carte 3D à partir d un seul passage sur zone Lit du Rhône (bord) 22
23 Carte acoustique Instrumentation du sonar Problèmes rencontrés Carte 3D non métrique Erreur de reconstruction due aux mouvements du sonar Ajout de capteurs au sonar Utilisation d un GPS Utilisation d une centrale inertielle 23


24 Carte acoustique Carte 3D acoustique Relevé sonar d une amphore sur le pont d une épave 24
25 Fusion des cartes Problématique Carte de modalité différente Echantillonnage différent» Aucun point ne correspond entre les deux cartes Types d informations différentes» Information avec texture pour la carte locale» Nuage de points seul pour la carte globale 25
26 Fusion des cartes Méthode de fusion Alignement des modèles par ressemblance géométrique Utilisation des nuages de points des deux cartes Recalage du modèle «vidéo» sur le modèle acoustique Utilisation de l algorithme ICP Minimisation de distance» permet d éviter le problème d échantillonnage Converge vers une solution locale si le déplacement entre les deux modèles est trop important Utilisation d une méthode de recalage approximatif» Fournis une estimation du mouvement global entre les deux modèles 26
27 Recalage des cartes Carte Globale 27
28 Recalage des cartes Carte Globale Grille sonar 1.5 x 1.5 Alignement ICP avec 100 points Erreur de recalage manuel moyenne 3 cm Erreur de recalage ICP moyenne 1 cm 28
29 Conclusion Reconstruction 3D Calibrage de la caméra - Connaissance des paramètres du modèle de la caméra - Compensation des paramètres modifiant l indice de réfraction de l eau dans le modèle de la caméra Détection / Appariement des points d intérêts - Méthode de Harris et algorithme de SIFT - Points détectés robustes - Harris détecte plus de points robuste que SIFT Reconstruction euclidienne - Structure 3D texturée Carte acoustique 3D Utilisation d un sonar multifaisceaux Carte 3D du fond obtenue Recalage des différentes cartes Alignement de modèle 3D par ressemblance géométrique Utilisation directe des nuages de points Alignement en deux étapes - Alignement approximatif par méthode manuelle - Alignement fin par ICP 29
30 Perspectives Reconstruction 3D Améliorer la précision de reconstruction en utilisant des méthodes issues de la photogrammétrie Augmenter la résolution du modèle 3D Chercher des nouveaux points autour des points robustes Carte acoustique Réaliser une carte «complète» (concaténation de différentes cartes acoustiques) 30
31 PICS 31

32 Cooperative Marine Vehicles for Underwater Archeological Survey 2 objectives : Multiple Marine Vehicles Systems for Marine Archeology Trans disciplinarity networked activity : underwater archeology/ robotics Expertise and ressource of 3 partners : LIRMM CNRS, Montpellier, France CNR ISSIA, Genova, Italy DSOR, Lisbon, Portugal. Previous collaboration : 2 bilateral agreements (n and n 21502), 2 European projects FreeSub (RTN FP5 ) and FreeSubNet (RTN FP6). 32
33 Cooperative Marine Vehicles for Underwater Archeological Survey Scientific issues: Coordinated control of vehicles Multimodal fusion of scanning information Software architecture Control architecture with guaranteed performances 33
34 Cooperative Marine Vehicles for Underwater Archeological Survey Ressources Surface craft (Charlie, Delfim) Underwater system (Jack, 3D underwater vision system (Triton) Underwater communication device Distant teleoperation station 34
35 Cooperative Marine Vehicles for Underwater Archeological Survey Milestones: Underwater communication : acoustic modem 3D/sonar on ROV Navigation system quantified : error drifting model Teleoperation station : design Tests on archeological sites: Rhone river (with DRASSM) 35
36 Fouilles BOLIVIE Centre d'archéologie Subaquatique Andine CASA Centro de Arqueología Subacuática Andina 36
Comparaison de Relevés 3D issus de plusieurs Systèmes de Numérisation
 Laboratoire Vision & Robotique Comparaison de Relevés 3D issus de plusieurs Systèmes de Numérisation Emilie KOENIG, Benjamin ALBOUY, Sylvie TREUILLET, Yves Lucas Contact : Sylvie Treuillet Polytech'Orléans
Laboratoire Vision & Robotique Comparaison de Relevés 3D issus de plusieurs Systèmes de Numérisation Emilie KOENIG, Benjamin ALBOUY, Sylvie TREUILLET, Yves Lucas Contact : Sylvie Treuillet Polytech'Orléans
Claire NOEL Directeur Scientifique
 Bureau d é études en océanographie acoustique SEMANTIC TS Sanary (Var) Claire NOEL Directeur Scientifique Docteur Ingénieur Opérateur sonar Capitaine 200 Plongeur PRO - Modélisation - Traitement du signal
Bureau d é études en océanographie acoustique SEMANTIC TS Sanary (Var) Claire NOEL Directeur Scientifique Docteur Ingénieur Opérateur sonar Capitaine 200 Plongeur PRO - Modélisation - Traitement du signal
Analyse de la vidéo. Chapitre 4.1 - La modélisation pour le suivi d objet. 10 mars 2015. Chapitre 4.1 - La modélisation d objet 1 / 57
 Analyse de la vidéo Chapitre 4.1 - La modélisation pour le suivi d objet 10 mars 2015 Chapitre 4.1 - La modélisation d objet 1 / 57 La représentation d objets Plan de la présentation 1 La représentation
Analyse de la vidéo Chapitre 4.1 - La modélisation pour le suivi d objet 10 mars 2015 Chapitre 4.1 - La modélisation d objet 1 / 57 La représentation d objets Plan de la présentation 1 La représentation
Projet de traitement d'image - SI 381 reconstitution 3D d'intérieur à partir de photographies
 Projet de traitement d'image - SI 381 reconstitution 3D d'intérieur à partir de photographies Régis Boulet Charlie Demené Alexis Guyot Balthazar Neveu Guillaume Tartavel Sommaire Sommaire... 1 Structure
Projet de traitement d'image - SI 381 reconstitution 3D d'intérieur à partir de photographies Régis Boulet Charlie Demené Alexis Guyot Balthazar Neveu Guillaume Tartavel Sommaire Sommaire... 1 Structure
Calage robuste et accéléré de nuages de points en environnements naturels via l apprentissage automatique
 Calage robuste et accéléré de nuages de points en environnements naturels via l apprentissage automatique Mémoire Maxime Latulippe Maîtrise en informatique Maître ès sciences (M.Sc.) Québec, Canada Maxime
Calage robuste et accéléré de nuages de points en environnements naturels via l apprentissage automatique Mémoire Maxime Latulippe Maîtrise en informatique Maître ès sciences (M.Sc.) Québec, Canada Maxime
Intelligence artificielle et les défis en robotique mobile et autonome
 Intelligence artificielle et les défis en robotique mobile et autonome Éric Beaudry http://planiart.usherbrooke.ca/~eric/ Étudiant au doctorat en informatique Laboratoires Planiart et Laborius 13 février
Intelligence artificielle et les défis en robotique mobile et autonome Éric Beaudry http://planiart.usherbrooke.ca/~eric/ Étudiant au doctorat en informatique Laboratoires Planiart et Laborius 13 février
N. Paparoditis, Laboratoire MATIS
 N. Paparoditis, Laboratoire MATIS Contexte: Diffusion de données et services locaux STEREOPOLIS II Un véhicule de numérisation mobile terrestre Lasers Caméras Système de navigation/positionnement STEREOPOLIS
N. Paparoditis, Laboratoire MATIS Contexte: Diffusion de données et services locaux STEREOPOLIS II Un véhicule de numérisation mobile terrestre Lasers Caméras Système de navigation/positionnement STEREOPOLIS
R-ICP : une nouvelle approche d appariement 3D orientée régions pour la reconnaissance faciale
 R-ICP : une nouvelle approche d appariement 3D orientée régions pour la reconnaissance faciale Boulbaba BEN AMOR, Karima OUJI, Mohsen ARDABILIAN, et Liming CHEN Laboratoire d InfoRmatique en Images et
R-ICP : une nouvelle approche d appariement 3D orientée régions pour la reconnaissance faciale Boulbaba BEN AMOR, Karima OUJI, Mohsen ARDABILIAN, et Liming CHEN Laboratoire d InfoRmatique en Images et
LIDAR LAUSANNE 2012. Nouvelles données altimétriques sur l agglomération lausannoise par technologie laser aéroporté et ses produits dérivés
 LIDAR LAUSANNE 2012 Nouvelles données altimétriques sur l agglomération lausannoise par technologie laser aéroporté et ses produits dérivés LIDAR 2012, nouveaux modèles altimétriques 1 Affaire 94022 /
LIDAR LAUSANNE 2012 Nouvelles données altimétriques sur l agglomération lausannoise par technologie laser aéroporté et ses produits dérivés LIDAR 2012, nouveaux modèles altimétriques 1 Affaire 94022 /
L analyse d images regroupe plusieurs disciplines que l on classe en deux catégories :
 La vision nous permet de percevoir et d interpreter le monde qui nous entoure. La vision artificielle a pour but de reproduire certaines fonctionnalités de la vision humaine au travers de l analyse d images.
La vision nous permet de percevoir et d interpreter le monde qui nous entoure. La vision artificielle a pour but de reproduire certaines fonctionnalités de la vision humaine au travers de l analyse d images.
Les moments de force. Ci-contre, un schéma du submersible MIR où l on voit les bras articulés pour la récolte d échantillons [ 1 ]
![Les moments de force. Ci-contre, un schéma du submersible MIR où l on voit les bras articulés pour la récolte d échantillons [ 1 ]](/thumbs/20/424260.jpg "Les moments de force. Ci-contre, un schéma du submersible MIR où l on voit les bras articulés pour la récolte d échantillons [ 1 ]") Les moments de force Les submersibles Mir peuvent plonger à 6 000 mètres, rester en immersion une vingtaine d heures et abriter 3 personnes (le pilote et deux observateurs), dans une sphère pressurisée
Les moments de force Les submersibles Mir peuvent plonger à 6 000 mètres, rester en immersion une vingtaine d heures et abriter 3 personnes (le pilote et deux observateurs), dans une sphère pressurisée
Reconnaissance de visages 2.5D par fusion des indices de texture et de profondeur ICI 12/12/12
 Reconnaissance de visages 2.5D par fusion des indices de texture et de profondeur ICI 12/12/12 2 Discrimination Invariance Expressions faciales Age Pose Eclairage 11/12/2012 3 Personne Inconnue Identité
Reconnaissance de visages 2.5D par fusion des indices de texture et de profondeur ICI 12/12/12 2 Discrimination Invariance Expressions faciales Age Pose Eclairage 11/12/2012 3 Personne Inconnue Identité
Programme de formation Photoshop : Initiation 24 heures de formation (3 jours) 1/2
 1/2") Programme de formation Photoshop : Initiation 24 heures de formation (3 jours) 1/2 Graphistes, photographes, webmasters, ou toute autre personne en charge de la création de visuels pour le web ou le print.
Programme de formation Photoshop : Initiation 24 heures de formation (3 jours) 1/2 Graphistes, photographes, webmasters, ou toute autre personne en charge de la création de visuels pour le web ou le print.
Détection des points d intérêt et Segmentation des images RGB-D. Présentée par : Bilal Tawbe. Semaine de la recherche de l UQO
 Détection des points d intérêt et Segmentation des images RGB-D Présentée par : Bilal Tawbe Semaine de la recherche de l UQO 25 Mars 2015 1. Introduction Les méthodes de détection de points d intérêt ont
Détection des points d intérêt et Segmentation des images RGB-D Présentée par : Bilal Tawbe Semaine de la recherche de l UQO 25 Mars 2015 1. Introduction Les méthodes de détection de points d intérêt ont
 Utilisation d informations visuelles dynamiques en asservissement visuel Armel Crétual IRISA, projet TEMIS puis VISTA L asservissement visuel géométrique Principe : Réalisation d une tâche robotique par
Utilisation d informations visuelles dynamiques en asservissement visuel Armel Crétual IRISA, projet TEMIS puis VISTA L asservissement visuel géométrique Principe : Réalisation d une tâche robotique par
Université des Sciences et Technologies de Lille 1 UFR Informatique. Projet scientifique de Master 2 Image, Vision, Interaction.
 Université des Sciences et Technologies de Lille 1 UFR Informatique Projet scientifique de Master 2 Image, Vision, Interaction Année 2012/1013 Reconstruction de scène réaliste via Kinect c Amélioration
Université des Sciences et Technologies de Lille 1 UFR Informatique Projet scientifique de Master 2 Image, Vision, Interaction Année 2012/1013 Reconstruction de scène réaliste via Kinect c Amélioration
Programme scientifique Majeure INTELLIGENCE NUMERIQUE. Mentions Image et Réalité Virtuelle Intelligence Artificielle et Robotique
 É C O L E D I N G É N I E U R D E S T E C H N O L O G I E S D E L I N F O R M A T I O N E T D E L A C O M M U N I C A T I O N Programme scientifique Majeure INTELLIGENCE NUMERIQUE Langage Java Mentions
É C O L E D I N G É N I E U R D E S T E C H N O L O G I E S D E L I N F O R M A T I O N E T D E L A C O M M U N I C A T I O N Programme scientifique Majeure INTELLIGENCE NUMERIQUE Langage Java Mentions
Reconstruction de bâtiments en 3D à partir de nuages de points LIDAR
 Reconstruction de bâtiments en 3D à partir de nuages de points LIDAR Mickaël Bergem 25 juin 2014 Maillages et applications 1 Table des matières Introduction 3 1 La modélisation numérique de milieux urbains
Reconstruction de bâtiments en 3D à partir de nuages de points LIDAR Mickaël Bergem 25 juin 2014 Maillages et applications 1 Table des matières Introduction 3 1 La modélisation numérique de milieux urbains
Système de sécurité de périmètre INTREPID
 TM Système de sécurité de périmètre INTREPID La nouvelle génération de systèmes de sécurité de périmètre MicroPoint Cable combine la technologie brevetée de Southwest Microwave, la puissance d un micro
TM Système de sécurité de périmètre INTREPID La nouvelle génération de systèmes de sécurité de périmètre MicroPoint Cable combine la technologie brevetée de Southwest Microwave, la puissance d un micro
Analyse Sémantique de Nuages de Points 3D et d Images dans les Milieux Urbains
 Analyse Sémantique de Nuages de Points 3D et d Images dans les Milieux Urbains Andrés Felipe SERNA MORALES Directrice de thèse: Beatriz MARCOTEGUI ITURMENDI [email protected] MINES ParisTech, Mathématiques
Analyse Sémantique de Nuages de Points 3D et d Images dans les Milieux Urbains Andrés Felipe SERNA MORALES Directrice de thèse: Beatriz MARCOTEGUI ITURMENDI [email protected] MINES ParisTech, Mathématiques
Présentation des projets de recherche BLOWOUT et METANE. Journée technique du Cedre. Brest 14 novembre 2013
 Présentation des projets de recherche BLOWOUT et METANE Journée technique du Cedre Brest 14 novembre 2013 1 Déroulement Fiches techniques Contexte Description technique Démonstration Questions 2 Fiches
Présentation des projets de recherche BLOWOUT et METANE Journée technique du Cedre Brest 14 novembre 2013 1 Déroulement Fiches techniques Contexte Description technique Démonstration Questions 2 Fiches
Vision industrielle et télédétection - Détection d ellipses. Guillaume Martinez 17 décembre 2007
 Vision industrielle et télédétection - Détection d ellipses Guillaume Martinez 17 décembre 2007 1 Table des matières 1 Le projet 3 1.1 Objectif................................ 3 1.2 Les choix techniques.........................
Vision industrielle et télédétection - Détection d ellipses Guillaume Martinez 17 décembre 2007 1 Table des matières 1 Le projet 3 1.1 Objectif................................ 3 1.2 Les choix techniques.........................
Chapitre I La fonction transmission
 Chapitre I La fonction transmission 1. Terminologies 1.1 Mode guidé / non guidé Le signal est le vecteur de l information à transmettre. La transmission s effectue entre un émetteur et un récepteur reliés
Chapitre I La fonction transmission 1. Terminologies 1.1 Mode guidé / non guidé Le signal est le vecteur de l information à transmettre. La transmission s effectue entre un émetteur et un récepteur reliés
Cie L*43.62 a* -0.12 b* -20.16. Des couleurs qui tiennent la route. Solutions de gestion des couleurs pour le secteur de l automobile
 Cie L*43.62 a* -0.12 b* -20.16 Des couleurs qui tiennent la route Solutions de gestion des couleurs pour le secteur de l automobile La couleur fait la différence Qu il s agisse d établir l identité visuelle
Cie L*43.62 a* -0.12 b* -20.16 Des couleurs qui tiennent la route Solutions de gestion des couleurs pour le secteur de l automobile La couleur fait la différence Qu il s agisse d établir l identité visuelle
FUSION DE CARTES DE PROFONDEURS EN PHOTOGRAMMETRIE ARCHITECTURALE
 Rapport de Projet Pluridisciplinaire Mastère spécialisé Photogrammétrie, positionnement et mesures de déformations (PPMD) FUSION DE CARTES DE PROFONDEURS EN PHOTOGRAMMETRIE ARCHITECTURALE GARDON Elzbieta
Rapport de Projet Pluridisciplinaire Mastère spécialisé Photogrammétrie, positionnement et mesures de déformations (PPMD) FUSION DE CARTES DE PROFONDEURS EN PHOTOGRAMMETRIE ARCHITECTURALE GARDON Elzbieta
3. Artefacts permettant la mesure indirecte du débit
 P-14V1 MÉTHODE DE MESURE DU DÉBIT D UN EFFLUENT INDUSTRIEL EN CANALISATIONS OUVERTES OU NON EN CHARGE 1. Domaine d application Cette méthode réglemente la mesure du débit d un effluent industriel en canalisations
P-14V1 MÉTHODE DE MESURE DU DÉBIT D UN EFFLUENT INDUSTRIEL EN CANALISATIONS OUVERTES OU NON EN CHARGE 1. Domaine d application Cette méthode réglemente la mesure du débit d un effluent industriel en canalisations
Analyse d images. [email protected]. Edmond Boyer UFRIMA 1
 Analyse d images [email protected] Edmond Boyer UFRIMA 1 1 Généralités Analyse d images (Image Analysis) : utiliser un ordinateur pour interpréter le monde extérieur au travers d images. Images Objets
Analyse d images [email protected] Edmond Boyer UFRIMA 1 1 Généralités Analyse d images (Image Analysis) : utiliser un ordinateur pour interpréter le monde extérieur au travers d images. Images Objets
Déroulement d un projet en DATA MINING, préparation et analyse des données. Walid AYADI
 1 Déroulement d un projet en DATA MINING, préparation et analyse des données Walid AYADI 2 Les étapes d un projet Choix du sujet - Définition des objectifs Inventaire des données existantes Collecte, nettoyage
1 Déroulement d un projet en DATA MINING, préparation et analyse des données Walid AYADI 2 Les étapes d un projet Choix du sujet - Définition des objectifs Inventaire des données existantes Collecte, nettoyage
Introduction au maillage pour le calcul scientifique
 Introduction au maillage pour le calcul scientifique CEA DAM Île-de-France, Bruyères-le-Châtel [email protected] Présentation adaptée du tutorial de Steve Owen, Sandia National Laboratories, Albuquerque,
Introduction au maillage pour le calcul scientifique CEA DAM Île-de-France, Bruyères-le-Châtel [email protected] Présentation adaptée du tutorial de Steve Owen, Sandia National Laboratories, Albuquerque,
MOTORISATION DIRECTDRIVE POUR NOS TELESCOPES. Par C.CAVADORE ALCOR-SYSTEM WETAL 2013 10 Nov
 1 MOTORISATION DIRECTDRIVE POUR NOS TELESCOPES Par C.CAVADORE ALCOR-SYSTEM WETAL 2013 10 Nov Pourquoi motoriser un télescope? 2 Pour compenser le mouvement de la terre (15 /h) Observation visuelle Les
1 MOTORISATION DIRECTDRIVE POUR NOS TELESCOPES Par C.CAVADORE ALCOR-SYSTEM WETAL 2013 10 Nov Pourquoi motoriser un télescope? 2 Pour compenser le mouvement de la terre (15 /h) Observation visuelle Les
Introduction au Data-Mining
 Introduction au Data-Mining Alain Rakotomamonjy - Gilles Gasso. INSA Rouen -Département ASI Laboratoire PSI Introduction au Data-Mining p. 1/25 Data-Mining : Kèkecé? Traduction : Fouille de données. Terme
Introduction au Data-Mining Alain Rakotomamonjy - Gilles Gasso. INSA Rouen -Département ASI Laboratoire PSI Introduction au Data-Mining p. 1/25 Data-Mining : Kèkecé? Traduction : Fouille de données. Terme
Rayonnements dans l univers
 Terminale S Rayonnements dans l univers Notions et contenu Rayonnements dans l Univers Absorption de rayonnements par l atmosphère terrestre. Etude de documents Compétences exigibles Extraire et exploiter
Terminale S Rayonnements dans l univers Notions et contenu Rayonnements dans l Univers Absorption de rayonnements par l atmosphère terrestre. Etude de documents Compétences exigibles Extraire et exploiter
Fig. 1 Le détecteur de LHCb. En bas à gauche : schématiquement ; En bas à droite: «Event Display» développé au LAL.
 LHCb est l'une des expériences installées sur le LHC. Elle recherche la physique au-delà du Modèle standard en étudiant les mésons Beaux et Charmés. L accent est mis entre autres sur l étude de la violation
LHCb est l'une des expériences installées sur le LHC. Elle recherche la physique au-delà du Modèle standard en étudiant les mésons Beaux et Charmés. L accent est mis entre autres sur l étude de la violation
Recherche d'images par le contenu Application au monitoring Télévisuel à l'institut national de l'audiovisuel
 Recherche d'images par le contenu Application au monitoring Télévisuel à l'institut national de l'audiovisuel Alexis Joly [email protected] INRIA - IMEDIA Alexis Joly cours monitoring p. 1 Plan de l'exposé
Recherche d'images par le contenu Application au monitoring Télévisuel à l'institut national de l'audiovisuel Alexis Joly [email protected] INRIA - IMEDIA Alexis Joly cours monitoring p. 1 Plan de l'exposé
Scanner laser HDS7000 Ultra rapide, à portée étendue
 > 1 million de points / sec Scanner laser HDS7000 Ultra rapide, à portée étendue > 180 m de portée HDS7000 Scanner laser ultra rapide pour les professionnels exigeants Les scanners à mesure de phase sont
> 1 million de points / sec Scanner laser HDS7000 Ultra rapide, à portée étendue > 180 m de portée HDS7000 Scanner laser ultra rapide pour les professionnels exigeants Les scanners à mesure de phase sont
Depuis quelques années, les
 PHOTOGRAMMÉTRIE la photogrammétrie se trouve soudainement revalorisée, dans une période où la lasergrammétrie semblait s imposer dans la plupart des opérations de relevé architectural. Cet article s attachera
PHOTOGRAMMÉTRIE la photogrammétrie se trouve soudainement revalorisée, dans une période où la lasergrammétrie semblait s imposer dans la plupart des opérations de relevé architectural. Cet article s attachera
Le second nuage : questions autour de la lumière
 Le second nuage : questions autour de la lumière Quelle vitesse? infinie ou pas? cf débats autour de la réfraction (Newton : la lumière va + vite dans l eau) mesures astronomiques (Rœmer, Bradley) : grande
Le second nuage : questions autour de la lumière Quelle vitesse? infinie ou pas? cf débats autour de la réfraction (Newton : la lumière va + vite dans l eau) mesures astronomiques (Rœmer, Bradley) : grande
Microscopie de fluorescence Etat de l art
 Etat de l art Bibliométrie (Web of sciences) CLSM GFP & TPE EPI-FLUORESCENCE 1 Fluorescence Diagramme de JABLONSKI S2 S1 10-12 s Excitation Eex Eem 10-9 s Émission Courtoisie de C. Spriet
Etat de l art Bibliométrie (Web of sciences) CLSM GFP & TPE EPI-FLUORESCENCE 1 Fluorescence Diagramme de JABLONSKI S2 S1 10-12 s Excitation Eex Eem 10-9 s Émission Courtoisie de C. Spriet
i7 0 Guide de référence rapide Français Document number: 86141-1 Date: 11-2010
 i7 0 Guide de référence rapide Français Document number: 86141-1 Date: 11-2010 FRANÇAIS Document number: 86141-1 Date: 02-2011 Commandes d instrument Disposition des commandes et fonctions. Mise en marche
i7 0 Guide de référence rapide Français Document number: 86141-1 Date: 11-2010 FRANÇAIS Document number: 86141-1 Date: 02-2011 Commandes d instrument Disposition des commandes et fonctions. Mise en marche
Colorisation et texturation temps réel d environnements urbains par système mobile avec scanner laser et caméra fish-eye
 Colorisation et texturation temps réel d environnements urbains par système mobile avec scanner laser et caméra fish-eye Résumé Jean-Emmanuel Deschaud, Xavier Brun, François Goulette Mines ParisTech, CAOR-Centre
Colorisation et texturation temps réel d environnements urbains par système mobile avec scanner laser et caméra fish-eye Résumé Jean-Emmanuel Deschaud, Xavier Brun, François Goulette Mines ParisTech, CAOR-Centre
Le suivi de la qualité. Méthode MSP : généralités
 Le suivi de la qualité La politique qualité d une entreprise impose que celle maîtrise sa fabrication. Pour cela, elle doit être capable d évaluer la «qualité» de son processus de production et ceci parfois
Le suivi de la qualité La politique qualité d une entreprise impose que celle maîtrise sa fabrication. Pour cela, elle doit être capable d évaluer la «qualité» de son processus de production et ceci parfois
1.2. REALISATION DES OPERATIONS DE PRELEVEMENTS ET D ANALYSES
 AVANT-PROPOS Le présent document a été réalisé par ASCONIT Consultants, pour le compte du Conseil Général de Haute-Savoie (CG74) dans le cadre du programme 2007-2008 du suivi de la qualité des eaux des
AVANT-PROPOS Le présent document a été réalisé par ASCONIT Consultants, pour le compte du Conseil Général de Haute-Savoie (CG74) dans le cadre du programme 2007-2008 du suivi de la qualité des eaux des
Traitement bas-niveau
 Plan Introduction L approche contour (frontière) Introduction Objectifs Les traitements ont pour but d extraire l information utile et pertinente contenue dans l image en regard de l application considérée.
Plan Introduction L approche contour (frontière) Introduction Objectifs Les traitements ont pour but d extraire l information utile et pertinente contenue dans l image en regard de l application considérée.
Monitoring et suivi du comportement des chaussées
 Monitoring et suivi du comportement des chaussées Pierre Hornych Juliette Blanc IFSTTAR - LAMES 1/xx MONITORING ET SUIVI DU COMPORTEMENT DES CHAUSSÉES DÉVELOPPEMENTS RÉCENTS ET PERSPECTIVES Introduction
Monitoring et suivi du comportement des chaussées Pierre Hornych Juliette Blanc IFSTTAR - LAMES 1/xx MONITORING ET SUIVI DU COMPORTEMENT DES CHAUSSÉES DÉVELOPPEMENTS RÉCENTS ET PERSPECTIVES Introduction
ERGONOMIE ET OPTIMISATION DU TAUX DE CONVERSION D UN SITE INTERNET Partie 1/2
 Lorraine ERGONOMIE ET OPTIMISATION DU TAUX DE CONVERSION D UN SITE INTERNET Partie 1/2 Attirer des visiteurs sur un site internet, c est bien ; les transformer en clients, c est mieux! Cette phrase semble
Lorraine ERGONOMIE ET OPTIMISATION DU TAUX DE CONVERSION D UN SITE INTERNET Partie 1/2 Attirer des visiteurs sur un site internet, c est bien ; les transformer en clients, c est mieux! Cette phrase semble
SLAM Visuel 3D pour robot mobile autonome
 Master de Sciences Mention «Imagerie, Robotique et Ingénierie pour le Vivant» - Projet de Fin D étude - SLAM Visuel 3D pour robot mobile autonome Romain Drouilly Encadrants ECA Benoit Morisset Pierrick
Master de Sciences Mention «Imagerie, Robotique et Ingénierie pour le Vivant» - Projet de Fin D étude - SLAM Visuel 3D pour robot mobile autonome Romain Drouilly Encadrants ECA Benoit Morisset Pierrick
" Gestion des données issues du réseau de mesures limnimétriques des cours d eau non navigables "
 " Gestion des données issues du réseau de mesures par ir Sébastien Gailliez Plan de l exposé 1. Introduction 2. Réseau de mesures 3. Base de données AQUALIM 4. Gestion du réseau de mesures 5. Logiciels
" Gestion des données issues du réseau de mesures par ir Sébastien Gailliez Plan de l exposé 1. Introduction 2. Réseau de mesures 3. Base de données AQUALIM 4. Gestion du réseau de mesures 5. Logiciels
CAP CAMION A ASSISTANCE PNEUMATIQUE
 Séminaire mi parcours Stock-e 2010 CAP CAMION A ASSISTANCE PNEUMATIQUE Iyad Balloul Renault Trucks - [email protected] Eric Bideaux INSA Lyon - [email protected] Marc Michard LMFA - [email protected]
Séminaire mi parcours Stock-e 2010 CAP CAMION A ASSISTANCE PNEUMATIQUE Iyad Balloul Renault Trucks - [email protected] Eric Bideaux INSA Lyon - [email protected] Marc Michard LMFA - [email protected]
Big Data et Graphes : Quelques pistes de recherche
 Big Data et Graphes : Quelques pistes de recherche Hamamache Kheddouci Laboratoire d'informatique en Image et Systèmes d'information LIRIS UMR 5205 CNRS/INSA de Lyon/Université Claude Bernard Lyon 1/Université
Big Data et Graphes : Quelques pistes de recherche Hamamache Kheddouci Laboratoire d'informatique en Image et Systèmes d'information LIRIS UMR 5205 CNRS/INSA de Lyon/Université Claude Bernard Lyon 1/Université
données en connaissance et en actions?
 1 Partie 2 : Présentation de la plateforme SPSS Modeler : Comment transformer vos données en connaissance et en actions? SPSS Modeler : l atelier de data mining Large gamme de techniques d analyse (algorithmes)
1 Partie 2 : Présentation de la plateforme SPSS Modeler : Comment transformer vos données en connaissance et en actions? SPSS Modeler : l atelier de data mining Large gamme de techniques d analyse (algorithmes)
10ème Congrès Français d'acoustique Lyon, 12-16 Avril 2010
 10ème Congrès Français d'acoustique Lyon, 12-16 Avril 2010 Le compressed sensing pour l holographie acoustique de champ proche II: Mise en œuvre expérimentale. Antoine Peillot 1, Gilles Chardon 2, François
10ème Congrès Français d'acoustique Lyon, 12-16 Avril 2010 Le compressed sensing pour l holographie acoustique de champ proche II: Mise en œuvre expérimentale. Antoine Peillot 1, Gilles Chardon 2, François
UNIVERSITÉ DE MONTRÉAL DÉTERMINATION D UNE MÉTRIQUE POUR LE PROBLÈME DE LOCALISATION ET CARTOGRAPHIE SIMULTANÉES
 UNIVERSITÉ DE MONTRÉAL DÉTERMINATION D UNE MÉTRIQUE POUR LE PROBLÈME DE LOCALISATION ET CARTOGRAPHIE SIMULTANÉES ALEXANDRE AUBERT DÉPARTEMENT DE GÉNIE ÉLECTRIQUE ÉCOLE POLYTECHNIQUE DE MONTRÉAL MÉMOIRE
UNIVERSITÉ DE MONTRÉAL DÉTERMINATION D UNE MÉTRIQUE POUR LE PROBLÈME DE LOCALISATION ET CARTOGRAPHIE SIMULTANÉES ALEXANDRE AUBERT DÉPARTEMENT DE GÉNIE ÉLECTRIQUE ÉCOLE POLYTECHNIQUE DE MONTRÉAL MÉMOIRE
Le signal GPS. Les horloges atomiques à bord des satellites GPS produisent une fréquence fondamentale f o = 10.23 Mhz
 Le signal GPS Les horloges atomiques à bord des satellites GPS produisent une fréquence fondamentale f o = 10.23 Mhz Deux signaux en sont dérivés: L1 (fo x 154) = 1.57542 GHz, longueur d onde = 19.0 cm
Le signal GPS Les horloges atomiques à bord des satellites GPS produisent une fréquence fondamentale f o = 10.23 Mhz Deux signaux en sont dérivés: L1 (fo x 154) = 1.57542 GHz, longueur d onde = 19.0 cm
Lightroom. Chambre noire numérique. Organisation. Lightroom Catalog.lrcat. Lightroom Catalog Previews.lrdata 2005, 2006, 2007
 N O E Lightroom S Organisation Lightroom permet d organiser nos photos, de «développer» nos négatifs numériques, aussi bien en RAW qu en format JPEG, de les imprimer, et d en faire des diaporamas ou des
N O E Lightroom S Organisation Lightroom permet d organiser nos photos, de «développer» nos négatifs numériques, aussi bien en RAW qu en format JPEG, de les imprimer, et d en faire des diaporamas ou des
RIF@PARIS-SACLAY. Pascale Betinelli CEA LIST. Demi-journée d'information ECHORD++ 20 avril 2015 - M.E.N.E.S.R
 European Clearing House for Open Robotics Development Plus Plus RIF@PARIS-SACLAY Pascale Betinelli CEA LIST Demi-journée d'information ECHORD++ 20 avril 2015 - M.E.N.E.S.R 1 Experiments Robotics Innovation
European Clearing House for Open Robotics Development Plus Plus RIF@PARIS-SACLAY Pascale Betinelli CEA LIST Demi-journée d'information ECHORD++ 20 avril 2015 - M.E.N.E.S.R 1 Experiments Robotics Innovation
GEOLOCALISATION ET NAVIGATION A L AIDE DES SIGNAUX GNSS
 GEOLOCALISATION ET NAVIGATION A L AIDE DES SIGNAUX GNSS [email protected] 08/04/2014 1 EVOLUTION DU SYSTÈME GNSS 1995-2005 2005-2014 2014 GPS GNSS-1 GNSS-2 GLONASS Pas de garantie de service Dégradation
GEOLOCALISATION ET NAVIGATION A L AIDE DES SIGNAUX GNSS [email protected] 08/04/2014 1 EVOLUTION DU SYSTÈME GNSS 1995-2005 2005-2014 2014 GPS GNSS-1 GNSS-2 GLONASS Pas de garantie de service Dégradation
Vérification audiovisuelle de l identité
 Vérification audiovisuelle de l identité Rémi Landais, Hervé Bredin, Leila Zouari, et Gérard Chollet École Nationale Supérieure des Télécommunications, Département Traitement du Signal et des Images, Laboratoire
Vérification audiovisuelle de l identité Rémi Landais, Hervé Bredin, Leila Zouari, et Gérard Chollet École Nationale Supérieure des Télécommunications, Département Traitement du Signal et des Images, Laboratoire
RIE LE RENDU THEO. 2 e trim ÉTAPE DE FINITION BOÎTE DE DIALOGUE. remarques
 THEO RIE LE RENDU 2 e trim JANVIER 2008 remarques ÉTAPE DE FINITION Le rendu est la partie finale de notre création, à ce moment on décide que notre 3D est finie et l on en réalise une image 2D Cette image
THEO RIE LE RENDU 2 e trim JANVIER 2008 remarques ÉTAPE DE FINITION Le rendu est la partie finale de notre création, à ce moment on décide que notre 3D est finie et l on en réalise une image 2D Cette image
UN COURS DE PHOTO. le cadeau idéal pour progresser en photo. en 4 heures pour une personne. Des cours collectifs à choisir parmi 8 thèmes :
 UN COURS DE PHOTO en 4 heures pour une personne N 1 EN FRANCE DES COURS DE PHOTO Des cours collectifs à choisir parmi 8 thèmes : Net-Flou, Vitesse et Mouvement, Lumière, Photo-reportage, Portrait, Nuit-Lightpainting,
UN COURS DE PHOTO en 4 heures pour une personne N 1 EN FRANCE DES COURS DE PHOTO Des cours collectifs à choisir parmi 8 thèmes : Net-Flou, Vitesse et Mouvement, Lumière, Photo-reportage, Portrait, Nuit-Lightpainting,
Support SIG pour les projets d installation des champs pétroliers sous-marins
 Support SIG pour les projets d installation des champs pétroliers sous-marins 03 Octobre 2013 Michel Marrannes / Pascal Piquemal SOMMAIRE Courte présentation de Subsea 7 et de notre secteur d activité
Support SIG pour les projets d installation des champs pétroliers sous-marins 03 Octobre 2013 Michel Marrannes / Pascal Piquemal SOMMAIRE Courte présentation de Subsea 7 et de notre secteur d activité
CENTRALES HYDRAULIQUES
 CENTRALES HYDRAULIQUES FONCTIONNEMENT Les différentes centrales hydrauliques Les centrales hydrauliques utilisent la force de l eau en mouvement, autrement dit l énergie hydraulique des courants ou des
CENTRALES HYDRAULIQUES FONCTIONNEMENT Les différentes centrales hydrauliques Les centrales hydrauliques utilisent la force de l eau en mouvement, autrement dit l énergie hydraulique des courants ou des
Institut National Polytechnique de Toulouse (INP Toulouse) Systèmes informatiques. Younès RAOUI. samedi 29 avril 2011
 Systèmes informatiques. Younès RAOUI. samedi 29 avril 2011") Institut National Polytechnique de Toulouse (INP Toulouse) Systèmes informatiques Younès RAOUI samedi 29 avril 2011 Indexation d'une base de données images : Application à la localisation et la cartographie
Institut National Polytechnique de Toulouse (INP Toulouse) Systèmes informatiques Younès RAOUI samedi 29 avril 2011 Indexation d'une base de données images : Application à la localisation et la cartographie
INSTRUMENTATIONS OCÉANOGRAPHIQUES MÉTÉOROLOGIQUES ET HYDROLOGIQUES DÉVELOPPÉES PAR LA SOCIÉTÉ SAFARE-CROUZET
 DOCUMENT 4.7. INSTRUMENTATIONS OCÉANOGRAPHIQUES MÉTÉOROLOGIQUES ET HYDROLOGIQUES DÉVELOPPÉES PAR LA SOCIÉTÉ SAFARE-CROUZET Jean-Jacques PESANDO Ingénieur Chef des Projets Océanographiques Société SAFARE-CROUZET
DOCUMENT 4.7. INSTRUMENTATIONS OCÉANOGRAPHIQUES MÉTÉOROLOGIQUES ET HYDROLOGIQUES DÉVELOPPÉES PAR LA SOCIÉTÉ SAFARE-CROUZET Jean-Jacques PESANDO Ingénieur Chef des Projets Océanographiques Société SAFARE-CROUZET
La classification automatique de données quantitatives
 La classification automatique de données quantitatives 1 Introduction Parmi les méthodes de statistique exploratoire multidimensionnelle, dont l objectif est d extraire d une masse de données des informations
La classification automatique de données quantitatives 1 Introduction Parmi les méthodes de statistique exploratoire multidimensionnelle, dont l objectif est d extraire d une masse de données des informations
Rapport. Mesures de champ de très basses fréquences à proximité d antennes de stations de base GSM et UMTS
 Rapport Mesures de champ de très basses fréquences à proximité d antennes de stations de base GSM et UMTS A.AZOULAY T.LETERTRE R. DE LACERDA Convention AFSSET / Supélec 2009-1 - 1. Introduction Dans le
Rapport Mesures de champ de très basses fréquences à proximité d antennes de stations de base GSM et UMTS A.AZOULAY T.LETERTRE R. DE LACERDA Convention AFSSET / Supélec 2009-1 - 1. Introduction Dans le
Expérience 3 Formats de signalisation binaire
 Expérience 3 Formats de signalisation binaire Introduction Procédures Effectuez les commandes suivantes: >> xhost nat >> rlogin nat >> setenv DISPLAY machine:0 >> setenv MATLABPATH /gel/usr/telecom/comm_tbx
Expérience 3 Formats de signalisation binaire Introduction Procédures Effectuez les commandes suivantes: >> xhost nat >> rlogin nat >> setenv DISPLAY machine:0 >> setenv MATLABPATH /gel/usr/telecom/comm_tbx
Mesure agnostique de la qualité des images.
 Mesure agnostique de la qualité des images. Application en biométrie Christophe Charrier Université de Caen Basse-Normandie GREYC, UMR CNRS 6072 Caen, France 8 avril, 2013 C. Charrier NR-IQA 1 / 34 Sommaire
Mesure agnostique de la qualité des images. Application en biométrie Christophe Charrier Université de Caen Basse-Normandie GREYC, UMR CNRS 6072 Caen, France 8 avril, 2013 C. Charrier NR-IQA 1 / 34 Sommaire
Efficace et ciblée : La surveillance des signaux de télévision numérique (2)
") Efficace et ciblée : La surveillance des signaux de télévision numérique (2) La première partie de cet article publié dans le numéro 192 décrit la méthode utilisée pour déterminer les points de surveillance
Efficace et ciblée : La surveillance des signaux de télévision numérique (2) La première partie de cet article publié dans le numéro 192 décrit la méthode utilisée pour déterminer les points de surveillance
Société de Geo-engineering
 Gestion de la maintenance des réseaux le géoréférencement inertiel direct, technologie automatisée d'acquisition d'objets 2D / 3D vers les SIG Société de Geo-engineering Activité d'expertise et d'ingénierie
Gestion de la maintenance des réseaux le géoréférencement inertiel direct, technologie automatisée d'acquisition d'objets 2D / 3D vers les SIG Société de Geo-engineering Activité d'expertise et d'ingénierie
La détection en mer sous la surface pendant l accident de Deepwater Horizon
 La détection en mer sous la surface pendant l accident de Deepwater Horizon Richard Camilli Woods Hole Oceanographic Institution Dept of Applied Ocean Physics and Engineering Deep Submergence Laboratory
La détection en mer sous la surface pendant l accident de Deepwater Horizon Richard Camilli Woods Hole Oceanographic Institution Dept of Applied Ocean Physics and Engineering Deep Submergence Laboratory
Big Data et Graphes : Quelques pistes de recherche
 Big Data et Graphes : Quelques pistes de recherche Hamamache Kheddouci http://liris.cnrs.fr/hamamache.kheddouci Laboratoire d'informatique en Image et Systèmes d'information LIRIS UMR 5205 CNRS/INSA de
Big Data et Graphes : Quelques pistes de recherche Hamamache Kheddouci http://liris.cnrs.fr/hamamache.kheddouci Laboratoire d'informatique en Image et Systèmes d'information LIRIS UMR 5205 CNRS/INSA de
Projet de Traitement du Signal Segmentation d images SAR
 Projet de Traitement du Signal Segmentation d images SAR Introduction En analyse d images, la segmentation est une étape essentielle, préliminaire à des traitements de haut niveau tels que la classification,
Projet de Traitement du Signal Segmentation d images SAR Introduction En analyse d images, la segmentation est une étape essentielle, préliminaire à des traitements de haut niveau tels que la classification,
La physique quantique couvre plus de 60 ordres de grandeur!
 La physique quantique couvre plus de 60 ordres de grandeur! 10-35 Mètre Super cordes (constituants élémentaires hypothétiques de l univers) 10 +26 Mètre Carte des fluctuations du rayonnement thermique
La physique quantique couvre plus de 60 ordres de grandeur! 10-35 Mètre Super cordes (constituants élémentaires hypothétiques de l univers) 10 +26 Mètre Carte des fluctuations du rayonnement thermique
«SERVICES D INGENIERIE»
 PUNCH POWERGLIDE STRASBOURG 45 années d expériences Le pôle R & D de PPS rassemble plus d une centaine d experts, chefs de projet, ingénieurs et techniciens expérimentés en recherche et développement,
PUNCH POWERGLIDE STRASBOURG 45 années d expériences Le pôle R & D de PPS rassemble plus d une centaine d experts, chefs de projet, ingénieurs et techniciens expérimentés en recherche et développement,
Catalogue Produits. Version 1
 Catalogue Produits Version 1 A propos d Actisense INTRODUCTION Interfaces et Sondes intelligentes Actisense. Des solutions plus intelligentes qui ont un sens. Actisense est synonyme d excellence dans le
Catalogue Produits Version 1 A propos d Actisense INTRODUCTION Interfaces et Sondes intelligentes Actisense. Des solutions plus intelligentes qui ont un sens. Actisense est synonyme d excellence dans le
Glossaire technique Veditec
 Glossaire technique Veditec 3D/2D DNR (digital noise réduction) La technologie DNR est un système de réduction numérique de bruit ayant pour but de réduire le bruit sur l image. Elle permet d obtenir des
Glossaire technique Veditec 3D/2D DNR (digital noise réduction) La technologie DNR est un système de réduction numérique de bruit ayant pour but de réduire le bruit sur l image. Elle permet d obtenir des
404 CAMCORDER FONCTIONS CAMÉSCOPE ET APPAREIL PHOTO
 FRANçAIS French 404 CAMCORDER FONCTIONS CAMÉSCOPE ET APPAREIL PHOTO Supplément du manuel d'utilisation de l'archos 404 Version 1.1 Pour télécharger la dernière version de ce manuel, veuillez vous rendre
FRANçAIS French 404 CAMCORDER FONCTIONS CAMÉSCOPE ET APPAREIL PHOTO Supplément du manuel d'utilisation de l'archos 404 Version 1.1 Pour télécharger la dernière version de ce manuel, veuillez vous rendre
Le projet 3D de la Ville de Liège: réflexions sur l'exploitation des données. Bernard Lechanteur, Responsable Cellule cartographie Ville de Liège
 Le projet 3D de la Ville de Liège: réflexions sur l'exploitation des données Bernard Lechanteur, Responsable Cellule cartographie Ville de Liège La cellule cartographie La cellule cartographie n est pas
Le projet 3D de la Ville de Liège: réflexions sur l'exploitation des données Bernard Lechanteur, Responsable Cellule cartographie Ville de Liège La cellule cartographie La cellule cartographie n est pas
Réalité virtuelle au service de la maintenance
 Réalité virtuelle au service de la maintenance Christian Boucheny EDF R&D SINETICS Séminaire Cartographie d intérieur et d extérieur ENSMP 04/09/2013 Sommaire 1. Application 1 : ADRM Aide à la Décision
Réalité virtuelle au service de la maintenance Christian Boucheny EDF R&D SINETICS Séminaire Cartographie d intérieur et d extérieur ENSMP 04/09/2013 Sommaire 1. Application 1 : ADRM Aide à la Décision
Systèmes de transmission
 Systèmes de transmission Conception d une transmission série FABRE Maxime 2012 Introduction La transmission de données désigne le transport de quelque sorte d'information que ce soit, d'un endroit à un
Systèmes de transmission Conception d une transmission série FABRE Maxime 2012 Introduction La transmission de données désigne le transport de quelque sorte d'information que ce soit, d'un endroit à un
Capteurs Passifs et Outils de Monitoring des Sédiments
 .Un préalable indispensable : Caractérisation des sédiments / Connaissance de l impact environnemental Projet CaPMoS : Capteurs Passifs et Outils de Monitoring des Sédiments Claire Alary (Mines Douai)
.Un préalable indispensable : Caractérisation des sédiments / Connaissance de l impact environnemental Projet CaPMoS : Capteurs Passifs et Outils de Monitoring des Sédiments Claire Alary (Mines Douai)
Notions physiques Niveau 2
 14 novembre 2011 Contenu 1. Les pressions Les différentes pressions 2. La loi de Mariotte (Autonomie en air) 2.1. Principes 2.2. Applications à la plongée 3. Le théorème d Archimède (Flottabilité) 3.1.
14 novembre 2011 Contenu 1. Les pressions Les différentes pressions 2. La loi de Mariotte (Autonomie en air) 2.1. Principes 2.2. Applications à la plongée 3. Le théorème d Archimède (Flottabilité) 3.1.
Electron S.R.L. - MERLINO - MILAN ITALIE Tel (++ 39 02) 90659200 Fax 90659180 Web www.electron.it, e-mail [email protected]
 90659200 Fax 90659180 Web www.electron.it, e-mail electron@electron.it") Electron S.R.L. Design Production & Trading of Educational Equipment B3510--II APPLIICATIIONS DE TRANSDUCTEURS A ULTRASONS MANUEL D IINSTRUCTIIONS POUR L ETUDIIANT Electron S.R.L. - MERLINO - MILAN ITALIE
Electron S.R.L. Design Production & Trading of Educational Equipment B3510--II APPLIICATIIONS DE TRANSDUCTEURS A ULTRASONS MANUEL D IINSTRUCTIIONS POUR L ETUDIIANT Electron S.R.L. - MERLINO - MILAN ITALIE
Mesures de PAR. Densité de flux de photons utiles pour la photosynthèse
 Densité de flux de photons utiles pour la photosynthèse Le rayonnement lumineux joue un rôle critique dans le processus biologique et chimique de la vie sur terre. Il intervient notamment dans sur les
Densité de flux de photons utiles pour la photosynthèse Le rayonnement lumineux joue un rôle critique dans le processus biologique et chimique de la vie sur terre. Il intervient notamment dans sur les
Dentiste Numérique Zfx. Un cabinet dentaire certifié avec la technologie innovante signée Zfx
 Dentiste Numérique Zfx Un cabinet dentaire certifié avec la technologie innovante signée Zfx Dentiste Numérique Zfx Des technologies novatrices parfaitement adaptées Zfx offre aux dentistes des technologies
Dentiste Numérique Zfx Un cabinet dentaire certifié avec la technologie innovante signée Zfx Dentiste Numérique Zfx Des technologies novatrices parfaitement adaptées Zfx offre aux dentistes des technologies
Les lières. MSc in Electronics and Information Technology Engineering. Ingénieur civil. en informatique. MSc in Architectural Engineering
 Ingénieur civil Ingénieur civil Les lières MSc in Electronics and Information Technology Engineering MSc in Architectural Engineering MSc in Civil Engineering MSc in Electromechanical Engineering MSc
Ingénieur civil Ingénieur civil Les lières MSc in Electronics and Information Technology Engineering MSc in Architectural Engineering MSc in Civil Engineering MSc in Electromechanical Engineering MSc
Glendinning propose depuis plus de trente ans des solutions innovantes d une qualité exceptionnelle pour l industrie nautique.
 Glendinning propose depuis plus de trente ans des solutions innovantes d une qualité exceptionnelle pour l industrie nautique. Cablemaster, le produit distribué par Saim Marine, est un enrouleur automatique
Glendinning propose depuis plus de trente ans des solutions innovantes d une qualité exceptionnelle pour l industrie nautique. Cablemaster, le produit distribué par Saim Marine, est un enrouleur automatique
Les moyens d observations en astronomie & astrophysique
 Les moyens d observations en astronomie & astrophysique Unité d Enseignement Libre Université de Nice- Sophia Antipolis F. Millour PAGE WEB DU COURS : www.oca.eu/fmillour cf le cours de Pierre Léna : «L
Les moyens d observations en astronomie & astrophysique Unité d Enseignement Libre Université de Nice- Sophia Antipolis F. Millour PAGE WEB DU COURS : www.oca.eu/fmillour cf le cours de Pierre Léna : «L
Mode d emploi ALTO MONITOR PROCESSEUR D ÉCOUTE. www.altoproaudio.com Version 1.0 Juillet 2003 Français
 Mode d emploi ALTO MONITOR PROCESSEUR D ÉCOUTE www.altoproaudio.com Version 1.0 Juillet 2003 Français SOMMAIRE 1. INTRODUCTION................................................................... 4 2. FONCTIONNALITÉS................................................................
Mode d emploi ALTO MONITOR PROCESSEUR D ÉCOUTE www.altoproaudio.com Version 1.0 Juillet 2003 Français SOMMAIRE 1. INTRODUCTION................................................................... 4 2. FONCTIONNALITÉS................................................................
LASER DOPPLER. Cependant elle n est pas encore utilisée en routine mais reste du domaine de la recherche et de l évaluation.
 LASER DOPPLER INTRODUCTION La technique qui utilise l effet Doppler à partir d un faisceau laser est l une des seules qui permette d enregistrer en continu le reflet de la perfusion superficielle de tissus
LASER DOPPLER INTRODUCTION La technique qui utilise l effet Doppler à partir d un faisceau laser est l une des seules qui permette d enregistrer en continu le reflet de la perfusion superficielle de tissus
Le Scanner 3D Dynamique
 Le Scanner 3D Dynamique Présentation & Références 2015 Page 1 / 9 1. Présentation Techniques Topo, est une société de Géomètres Experts créée en 1964 comptant aujourd hui près de 120 collaborateurs répartis
Le Scanner 3D Dynamique Présentation & Références 2015 Page 1 / 9 1. Présentation Techniques Topo, est une société de Géomètres Experts créée en 1964 comptant aujourd hui près de 120 collaborateurs répartis
A la découverte du Traitement. des signaux audio METISS. Inria Rennes - Bretagne Atlantique
 A la découverte du Traitement des signaux audio METISS Inria Rennes - Bretagne Atlantique Les conférences scientifiques au Lycée Descartes Imagerie médicale et neuronavigation par Pierre Hellier Le respect
A la découverte du Traitement des signaux audio METISS Inria Rennes - Bretagne Atlantique Les conférences scientifiques au Lycée Descartes Imagerie médicale et neuronavigation par Pierre Hellier Le respect
Laboratoire d informatique Gaspard-Monge UMR 8049. Journée Labex Bézout- ANSES
 Laboratoire d informatique Gaspard-Monge UMR 8049 Journée Labex Bézout- ANSES Présentation du laboratoire 150 membres, 71 chercheurs et enseignants-chercheurs, 60 doctorants 4 tutelles : CNRS, École des
Laboratoire d informatique Gaspard-Monge UMR 8049 Journée Labex Bézout- ANSES Présentation du laboratoire 150 membres, 71 chercheurs et enseignants-chercheurs, 60 doctorants 4 tutelles : CNRS, École des
ROBOT ET CHIRURGIE AORTIQUE:
 ROBOT ET CHIRURGIE AORTIQUE: FAISABILITÉ ET PERSPECTIVES FUTURES Fabien THAVEAU, Nabil CHAKFE, Jean-Georges KRETZ Service de Chirurgie Vasculaire, Strasbourg INTRODUCTION CHIRURGIE MINI-INVASIVE: but:
ROBOT ET CHIRURGIE AORTIQUE: FAISABILITÉ ET PERSPECTIVES FUTURES Fabien THAVEAU, Nabil CHAKFE, Jean-Georges KRETZ Service de Chirurgie Vasculaire, Strasbourg INTRODUCTION CHIRURGIE MINI-INVASIVE: but:
BeSpoon et l homme Connecté
 BeSpoon et l homme Connecté Paris 25 et 26 Mars BeSpoon est une société «Fabless» qui a développé en collaboration avec le CEA-Leti un composant IR-UWB (Impulse Radio Ultra Wide Band) dédié à la localisation
BeSpoon et l homme Connecté Paris 25 et 26 Mars BeSpoon est une société «Fabless» qui a développé en collaboration avec le CEA-Leti un composant IR-UWB (Impulse Radio Ultra Wide Band) dédié à la localisation
Logiciel Survey Pro. Équipé de Spectra Precision Central : La solution cloud de Spectra Precision. Survey Pro: le meilleur, tout simplement
 Logiciel Survey Pro Équipé de Spectra Precision Central : La solution cloud de Spectra Precision Survey Pro: le meilleur, tout simplement SURVEY PROSimplicité, fiabilité et sécurité Carnet de terrain Spectra
Logiciel Survey Pro Équipé de Spectra Precision Central : La solution cloud de Spectra Precision Survey Pro: le meilleur, tout simplement SURVEY PROSimplicité, fiabilité et sécurité Carnet de terrain Spectra
OPTIQUE GEOMETRIQUE POLYCOPIE DE COURS
 OPTIQUE GEOMETRIQUE POLYCOPIE DE COURS PR. MUSTAPHA ABARKAN EDITION 014-015 Université Sidi Mohamed Ben Abdallah de Fès - Faculté Polydisciplinaire de Taza Département Mathématiques, Physique et Informatique
OPTIQUE GEOMETRIQUE POLYCOPIE DE COURS PR. MUSTAPHA ABARKAN EDITION 014-015 Université Sidi Mohamed Ben Abdallah de Fès - Faculté Polydisciplinaire de Taza Département Mathématiques, Physique et Informatique
RECONSTRUCTION D'UN MODÈLE 3D D'OBJET AVEC LA KINECT
 PROJET DE SEMESTRE : RECONSTRUCTION D'UN MODÈLE 3D D'OBJET AVEC LA KINECT SOFTWARE PROJECT MANAGEMENT PLAN Projet Reconstruction d'un modèle 3D d'objet avec la Kinect Document École Software Project Management
PROJET DE SEMESTRE : RECONSTRUCTION D'UN MODÈLE 3D D'OBJET AVEC LA KINECT SOFTWARE PROJECT MANAGEMENT PLAN Projet Reconstruction d'un modèle 3D d'objet avec la Kinect Document École Software Project Management