UEC MSP Problèmes d équilibrage
|
|
|
- Laure Pépin
- il y a 9 ans
- Total affichages :
Transcription
1 UEC MSP Problèmes d équilibrage Partie 1 Machine rotative Partie 2 Machine alternative Durée: 6h (+ 2h exposé) Lionel MARTIN MSP1 Équilibrage machine rotative, machine alternative v2011

2 Partie 1: Machine rotative

3 Effort centrifuge ordre de grandeur Hypothèses: Géométrie simplifiée Matériau unique,homogène, isotrope etc 50cm Données: Acier 7.8 g/cm3 Excentration e: 0.01mm Rotor d alternateur 1500tr/min e 150cm 100cm 200cm 50cm 100cm Calculer F l effort centrifuge d u d u Ω u Rappel : dérivation d'un vecteur( dt ) =( dt ) + F = m.a =m.v²/r = m.r.w² Force centrifuge (N) = Masse (kg) Rayon (m) Vitesse de rotation^2 (rad/s) R0 R1 R1/ R0 F = ((π*0.25^2*( )+ π*0.5^2*2)*7800)*0.01*10^(-3)*(1500*2π/60)^2 = 3968 N Données: Excentration 1mm Rotor d alternateur 1500tr/min N soit 40 tonnes à 1500tr/min
 + F = m.a =m.v²/r = m.r.w² Force centrifuge (N) = Masse (kg) Rayon (m) Vitesse de rotation^2 (rad/s) R0 R1 R1/ R0 F = ((π*0.25^2*(1.")
4 Équilibrage statique / dynamique.g.g.g.g

5 Paramétrage S solide de masse ms de centre de gravité G en rotation dans B O projection orthogonale de Gs sur (o,x) OGs = b Ios opérateur d'inertie de S dans B au point O ici exprimé dans xyz Opérateur d ' inertie de S : As Fs Es [ I o, s ]= Fs Bs Ds Es Ds Cs [ ] R1 Torseur dynamique Torseur des efforts extérieurs PFD au point O?
![au point O ici exprimé dans xyz Opérateur d ' inertie de S : As Fs Es [ I o, s ]=](/docs-images/46/19486857/images/page_5.jpg "Fs Bs Ds Es Ds Cs [ ] R1 Torseur dynamique Torseur des efforts extérieurs PFD au")
6 Torseur dynamique Torseur Dynamique {D }={m γ G / R0 δ O / Ro }O, R0 Résultante dynamique d² b. y m γg / R0 =m ( d²dt²og )R0 =m ( dt² ) R0 = m b. α ². y 1 +m b. α z1 Moment dynamique d σ δo / Ro =( dt V O / R0 V G / R0 )R0 + m 1 O /R0 d[ I δo / Ro =( dt o, s ]. [ Ωs /R0 ] ) R0 +m 0 ([ δo / Ro = As Fs Es d Fs Bs Ds Es Ds Cs dt ][]) α. 0 R1 0 R1 R0 d ( As. α. x Fs.α. y Es. α. z) δo / Ro =( dt ) R0 δo / Ro = As.α. x 1 +( Es α ² Fs.α ). y 1 +( Fs α ² Es.α ). z1 1 1 { 1 } As. α 0 {D}= m b. α ² ( Es α ² Fs. α ) m b. α ( Fs α ² Es. α ) O
![α z1 Moment dynamique d σ δo / Ro =( dt V O / R0 V G / R0 )R0 + m 1 O /R0 d[ I δo / Ro =( dt o, s ].](/docs-images/46/19486857/images/page_6.jpg "[ Ωs /R0 ] ) R0 +m 0 ([ δo / Ro = As Fs Es d Fs Bs Ds Es Ds Cs dt ][]) α. 0 R1 0 R1 R0 d ( As. α. x Fs.α. y Es. α. z) δo / Ro =( dt ) R0 δo / Ro = As.")
7 Torseur des efforts extérieurs

8

9 Peut-on équilibrer avec une seule masse?.g.g.g.g

10 Peut-on équilibrer avec une seule masse? Pour équilibrer, il faut 2 masses dans le cas général

11 Équilibrer dès la conception:
12
13
14

15

16 Incertitudes à la fabrication: Incertitudes dues à l assemblage:

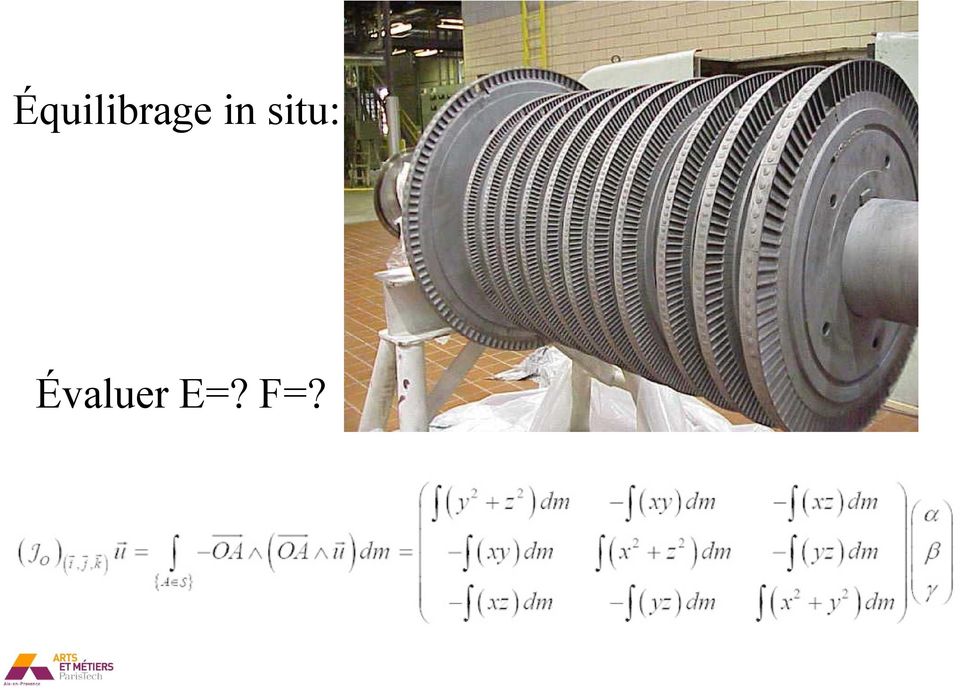
17 Équilibrage in situ: Évaluer E=? F=?
18 ?

19 Solution: plan d expérience Plan complet:! N O N! N O N Avec 1 indicateur vibratoire on teste 2 valeurs de masses sur 2 plans d équilibrage avec un positionnement tous les 45 -> 8*8*2*2 = 256 lancers Plan partiel (Taguchi): 4 lancers Avec 1 indicateur vibratoire on teste 2 valeurs de masses sur 2 positionnements de chaque plan
: 4 lancers Avec 1 indicateur vibratoire on teste 2 valeurs de")
20 Solution: utiliser une modélisation du système à réponse linéaire Balourd i Angle i. H Déplacement initial mes. Phase initiale mes. Balourd i. Phase i. + Masse test c. Angle c. H Déplacement test mes. Phase test mes.

21 Rappels: nombre complexes/plan complexe/signaux périodiques: Re + i Im Mod Exp (i Arg) Mod1 Exp (i wt) Mod2 Exp (i (wt+phase))
22 Techniques de l ingénieur BM M1TarageA - V 1initial C 1A= B test A On cherche BcA et BcB
23
24
25 Btb Bta Masse test: 1vis+2ecrous
26
27
28 Et les résonances? : modes propres
29 Et les résonances? Équilibrage à vitesse nominale
30 Solution : compromis Effectuer plusieurs équilibrages - si machine avec plage de variation: Vmin, Vmoy, Vmax - si une vitesse nominale: Vnom, V(chaque freq.prope traversée) Équilibrage à la première fréquence propre Équilibrage à vitesse nominale
31 Généralisation: arbre quelconque Np paliers Nv vitesses de rotations Nbc balourds correcteurs Il faut: Np*Nv >= Nbc Penser qu il faudra au minimum 2+Nbc*Nv lancers
32 Rotor d essai EDF
33 Appli 2: 3plans accessibles 3 paliers V V1 50 m1: 50g V2m1 50 V3m1 V V2m2 m2: 20g V1m2 V3m V2m3 V3m m3: 100g V1m Les masses tests sont placées en phase avec le top moteur 4 6 V1m3 8
34 Placement de masses PLAN A PLAN B PLAN C Lancer initial 1er Essai 2ème Essai 3ème Essai 50g / 0 20g / 0 100g / 0 Mesures Pallier 1 Pallier 2 Pallier 3 51µ / µ / µ / µ / µ / µ / µ / µ / µ / µ / µ / µ / 2
35 Équilibrage actif
36 Équilibrage actif
37 Équilibrage actif
38 Équilibrage actif
39 Partie 2: Machine alternative Masse alternative Masse mixte Masse rotative
40 Introduction Problématique : Effort moteur Machine alternative Efforts inertiels inconfort Sollicitations destruction Deux catégories d efforts : - Efforts internes - Efforts externes Objectifs : - Minimisation des déplacements - Limiter les transmissions des vibrations Solution : Réactions constantes sur les appuis équilibrage
41 Fixation du moteur sur le châssis Fixation?
42 Généralités Description d une machine alternative - moteur à piston Transformation d un mouvement de translation en rotation (réciproquement) Moteur à piston :
43 Généralités Description d une machine alternative - piston Rôle principal : Interface entre l énergie résultante de l explosion et énergie mécanique Tâches technologiques : - aspiration du mélange gaz/essence - expulsion des gaz brûlés - évacuation de la chaleur - étanchéité entre chambre de combustion et carter du vilebrequin Aspects techniques : - forme de la tête différente selon la forme de la chambre de combustion (tête plate, convexe, en héron, ) - 3 segments (segment de feu, segment d étanchéité, segment racleur) - jupe du piston guidage du piston dans le cylindre - axe du piston lien entre le piston et la bielle encaisse effort mécanique
44 Généralités Description d une machine alternative - bielle Rôle principal : Interface entre le piston et le vilebrequin Aspects techniques : architecture : - tête reliée au vilebrequin - pied relié à l axe du piston - corps types : - bielle monobloc - bielle assemblée - bielle fendue
45 Généralités Description d une machine alternative - vilebrequin Rôle principal : Mouvement rotatif du moteur Tâches technologiques : - transmission primaire (arbre à cames ) - entraînement des pompes et de l alternateur - entraînement des arbres d équilibrage Aspects techniques : - A) les portés : axe de rotation qui repose sur les paliers du carter moteur. - B) les masses : assurent la liaison entre les portées et les manetons - C) les manetons - D) queues de vilebrequin, comportant des roues crantées qui entraîneront les autres éléments du moteur.
46 Généralités Géométrie et types de moteurs cycle de fonctionnement : 2 temps ou 4 temps géométrie des moteurs (disposition) : - en ligne - en V - à plat angle de calage des bielles : - pour 2 temps 2 π n - pour 4 temps 4 π n


47 Généralités Géométrie et types de moteurs cycle de fonctionnement : 2 temps ou 4 temps
48 Généralités Définition des différents efforts et couples catégories de forces : - forces dues aux masses - forces dues au gaz réactions constantes sur appuis couple moteur - forces dues aux inerties efforts centrifuges et alternatifs différentes inerties : - inertie rotative : masse du vilebrequin - inertie alternative : masse du piston - inertie bielle Décomposition fictive - inertie alternative - inertie rotative 1- conservation de la masse mbielle =m A+ mb 2- conservation position centre de gravité m ( L L ) =m L A 1 B 1 3- conservation du moment d inertie par rapport au centre de gravité I Z =m A ( L L 1 ) 2 + m B L 12
49 Généralités Définition des différents efforts et couples Couples : - basculement : masse alternative, gaz. - galop : masse alternative, masse rotative. - lacet : masse rotative. Efforts : - pilon : masse alternative, masse rotative. - tamis : masse rotative.
50 Méthodes d équilibrage des masses rotatives Théorie Rappel : 1) centre de gravité sur l axe de rotation Système en rotation équilibré 2) axe de rotation soit axe central d inertie 1) centre de gravité sur l axe de rotation x dm P =0 y dmp =0 P ( S ) P ( S ) 2) axe de rotation soit axe central d inertie x z dm P=0 y z dm P=0 P ( S ) P ( S )

51 Méthodes d équilibrage des masses rotatives Applications Exercices!!!!
52 Méthodes d équilibrage des masses rotatives Applications - exercice 1 x dmp =0 x 1 m1 +x 2 m2 + xmrot =0 y dmp =0 y 1 m1 + y 2 m2 + ymrot =0 x z dm P =0 x 1 z 1 m1 +x 2 z 2 m2 +x. z. mrot =0 y z dm P =0 y 1 z 1 m1 + y 2 z 2 m2 + y. z. mrot =0 P ( S ) P ( S ) P ( S ) P ( S )
53 Méthodes d équilibrage des masses rotatives Applications - exercice 2 y 1= y 2 = R m1 m2 m 1 =m 2 = m rot 2
54 Méthodes d équilibrage des masses rotatives Applications - exercice 3 moteur bicylindre en ligne 4 temps :
55 Méthodes d équilibrage des masses rotatives Applications - exercice 3 moteur bicylindre en ligne 2 temps :
56 Stratégie M éq.? M tot vil? M éq.? M tot vil? 4 masses mrot / 2 4 mrot mrot / 2 4 mrot 2 masses EXT mrot 4 mrot 2 mrot / 3 10 mrot/3 2 masses INT mrot 4 mrot 2 mrot 6 mrot 2 masses ALT 0.5 mrot 1.5 mrot 4 mrot mrot 4 mrot M_vil_4masses M_vil_2masses_EXT Lionel MARTIN MSP1 Équilibrage machine rotative, machine alternative v2011
57 Méthodes d équilibrage des masses rotatives Applications - exercice 4 moteur 4 cylindres en ligne 4 temps :
58 Rappels : définition des différents efforts et couples Couples : - basculement : masse alternative, gaz. - galop : masse alternative, masse rotative. - lacet : masse rotative. Efforts : - pilon : masse alternative, masse rotative. - tamis : masse rotative.
59 Méthodes d équilibrage des masses alternatives Modélisation et paramétrage d un système piston bielle vilebrequin L, longueur de bielle R, excentricité du vilebrequin θ (t )=( Y 0, Y 1 ), position angulaire du vilebrequin ϕ(t )=(Y 0, Y 2 ), position angulaire de la bielle
) ( ( R V B,2/0 =R s ( θ (t ) ) θ ( t ) L expression de l accélération: expression de l effort : R 1 s ( θ (t ) ) L développement limité ( ) pilon Y 0 =m alternative R c ( θ (")
60 Méthodes d équilibrage des masses alternatives Modélisation et paramétrage d un système piston bielle vilebrequin relation entrée sortie : ( ( ( R OB= R c ( θ (t ) )+ L 1 s ( θ (t ) ) L expression de la vitesse : c ( θ (t )) ( ( R V B,2/0 =R s ( θ (t ) ) θ ( t ) L expression de l accélération: expression de l effort : R 1 s ( θ (t ) ) L développement limité ( ) pilon Y 0 =m alternative R c ( θ ( t ) ) c ( 2 θ ( t ) )+... θ ( t )2 F λ 4 λ3 ( ) 2 ) ) )) 2 ) Y 0 1 Y 0
61 Méthodes d équilibrage des masses alternatives Modélisation et paramétrage d un système piston bielle vilebrequin
62 Méthodes d équilibrage des masses alternatives Modélisation et paramétrage d un système piston bielle vilebrequin Pour malternative=0,200 kg. Vitesse du moteur constante à 4000 tr/min. R=0,04080 m. L=0,204 m. 1/λ=0,2. On obtient la courbe de l effort de pilon : [N] [rad] Point mort bas Pour malternative=0,200 kg. Vitesse du moteur constante à 4000 tr/min. R=0,04080 m. L=0,102 m. 1/λ=0,4. On obtient la courbe de l effort de pilon : [N] [rad]
63 Méthodes d équilibrage des masses alternatives Équilibrage de l effort de pilon - théorie formulation générale d un effort de pilon d ordre p : - pour un monocylindre : F pilon, p =k p malternative R θ (t )2 c( p θ (t )) avec k p =± cste cste ± ±... λ p 1 λ p +1 - pour un multicylindre : n 1 (( q π F pilon, p = k p malternative R θ (t )2 c p θ ( t )+ j n j=0 avec : q=2 ou 4, moteur 2 ou 4 temps. n est le nombre de cylindres ))
64 Méthodes d équilibrage des masses alternatives Équilibrage de l effort de pilon - théorie Principe : Utiliser l équivalence entre une masse alternative et deux masses rotatives - équilibrage de l effort de pilon d ordre 1 : 2 F pilon 1 =m alternative R θ (t ) c ( θ (t ) ) Formule d Euler F pilon 1 = malternative 2 R θ ( t ) 2 ei θ + m alternative 2 R θ (t )2 e i θ
65 Méthodes d équilibrage des masses alternatives Équilibrage de l effort de pilon - théorie généralisation pour un effort de pilon d ordre p : - mise en place de 2 masses rotatives de valeur unitaire : m= ( malternative cste +... λ p 1 2 p 2 ) - à la vitesse de rotation : p θ (t ) et p θ (t ) - en opposition pour un effort de signe positif. - en phase pour un effort de signe négatif. Arbre d'équilibrage d'une Suzuki GS425 (1979)
66 Méthodes d équilibrage des masses alternatives Équilibrage de l effort de pilon - exercice 2 : moteur monocylindre équilibrage de l effort de pilon d ordre 1 : Deux arbres d équilibrage primaires sans arbre d équilibrage primaire 2 F pilon 1 =m alternative R θ (t ) c ( θ (t ) ) un arbre d équilibrage primaire
67 Méthodes d équilibrage des masses alternatives Équilibrage de l effort de pilon - exercice 2 : moteur monocylindre équilibrage de l effort de pilon d ordre 1 : 2 F pilon 1 =m alternative R θ (t ) c ( θ (t ) )
68 Méthodes d équilibrage des masses alternatives Équilibrage de l effort de pilon - exercice 2 : moteur monocylindre équilibrage de l effort de pilon d ordre 2 : Deux arbres d équilibrage secondaires tournant à deux fois la vitesse de rotation moteur. Masses tournantes symétriques pas de couple de basculement Remarque : équilibrage du couple naturel de basculement d ordre 2 par la méthode de Lanchester décalage vertical des arbres
69 Méthodes d équilibrage des masses alternatives Équilibrage de l effort de pilon - exercice 2 : moteur monocylindre équilibrage de l effort de pilon d ordre 2 :
70 Méthodes d équilibrage des masses alternatives Équilibrage du couple de galop - théorie Principe : Ajouter des masses rotatives Effort de tamis couple de lacet masse en rotation Effort de pilon couple de galop ajout d une seconde masse en rotation de sens opposée ajout de deux masses symétriques Effort de pilon couple de galop Somme des efforts de pilon et des couples de galop existants et crées Annulation des efforts de pilon Somme des couples de galop ajout de quatre masses rotatives
71 Méthodes d équilibrage des masses alternatives Exercice 3 équilibrage moteur bicylindre en ligne 4 temps équilibrage de l effort de pilon d ordre 1 : F pilon1=2 malternative R θ (t )2 c ( θ (t ) ) ajout de quatre masses rotatives de valeur unitaire : m alternative 4 résultat : équilibrage non parfait effort de pilon résultant d ordre 1 : malternative R θ (t )2 c ( θ (t ) ) effort de tamis résultant d ordre 1 : malternative R θ (t )2 s ( θ (t ) ) équilibrage de l effort de pilon d ordre 2 : méthode du monocylindre avec multiplication par deux des valeurs des contrepoids équilibrage du couple de galop : plan médian : plan de symétrie pas de couple de galop
72 Méthodes d équilibrage des masses alternatives Exercice 3 équilibrage moteur bicylindre en ligne 2 temps équilibrage de l effort de pilon d ordre 1 : effort de pilon d ordre 1 nul. équilibrage de l effort de pilon d ordre 2 : méthode du monocylindre avec multiplication par deux des valeurs des contrepoids équilibrage du couple de galop : 2 C galop = 2 a ( m alternative R θ (t ) c ( θ (t ) ) ) X 0 ajout de quatre masses rotatives : 4 b m 1 R θ ( t )2 c ( θ ( t )+ β ) 2 a ( m alternative R θ ( t )2 c ( θ ( t ) ) )=0
73 Méthodes d équilibrage des masses alternatives Exercice 3 équilibrage moteur bicylindre en ligne 2 temps Pour b=a : donc : 2 m1 c ( θ (t )+ β ) =m alternative c ( θ (t ) ) m1 = malternative 2 et c ( θ (t )+ β )=c ( θ (t ))
74 Méthodes d équilibrage des masses alternatives Exercice 3 équilibrage moteur bicylindre en ligne 2 temps Sans arbre d équilibrage on a : couple de galop résultant : couple de lacet crée : a ( malternative R θ (t )2 c ( θ (t ) ) ) a ( malternative R θ (t )2 s ( θ (t ) ) )

75
76 Références Techniques de l ingénieur B machines alternatives BM machines rotatives Jean-Claude BÔNE Mécanique générale: Cours et applications avec exercices et problèmes # Editeur : Dunod (11 août 1994) # Collection : Sciences Sup# ISBN-10: # ISBN-13: ALAUZE, Carine. Equilibrage actif des machines tournantes : Application aux grandes lignes d'arbres. [En ligne] Thèse : Institut National des Sciences Appliquées de Lyon, 1998 [27/05/1999] Disponible sur : Images/animations: wikimédia/dailymotion
77 Films d illustration moteurs
Eléments mobiles du moteur Moteur 1/9
 Eléments mobiles du moteur Moteur 1/9 I Diagnostic des anomalies - Perte de compression ( par les segment ou par le piston ). - Consommation d huile ( remontée d huile dans la chambre ). - Bruits de fonctionnement
Eléments mobiles du moteur Moteur 1/9 I Diagnostic des anomalies - Perte de compression ( par les segment ou par le piston ). - Consommation d huile ( remontée d huile dans la chambre ). - Bruits de fonctionnement
Les véhicules La chaîne cinématique
 Un peu d histoire 1862 : M. BEAU DE ROCHAS invente le cycle à 4 temps 1864 : premier moteur à 4 temps, par M.OTTO 1870 : industrialisation de la voiture 1881 : première voiture électrique par M. JEANTAUD
Un peu d histoire 1862 : M. BEAU DE ROCHAS invente le cycle à 4 temps 1864 : premier moteur à 4 temps, par M.OTTO 1870 : industrialisation de la voiture 1881 : première voiture électrique par M. JEANTAUD
DISQUE DUR. Figure 1 Disque dur ouvert
 DISQUE DUR Le sujet est composé de 8 pages et d une feuille format A3 de dessins de détails, la réponse à toutes les questions sera rédigée sur les feuilles de réponses jointes au sujet. Toutes les questions
DISQUE DUR Le sujet est composé de 8 pages et d une feuille format A3 de dessins de détails, la réponse à toutes les questions sera rédigée sur les feuilles de réponses jointes au sujet. Toutes les questions
CABLECAM de HYMATOM. Figure 1 : Schéma du système câblecam et détail du moufle vu de dessus.
 CABLECAM de HYMATOM La société Hymatom conçoit et fabrique des systèmes de vidéosurveillance. Le système câblecam (figure 1) est composé d un chariot mobile sur quatre roues posé sur deux câbles porteurs
CABLECAM de HYMATOM La société Hymatom conçoit et fabrique des systèmes de vidéosurveillance. Le système câblecam (figure 1) est composé d un chariot mobile sur quatre roues posé sur deux câbles porteurs
association adilca www.adilca.com LE COUPLE MOTEUR
 LE COUPLE MOTEUR Quelles sont les caractéristiques essentielles d un véhicule à moteur? Les services marketing le savent, c est la puissance et la vitesse maximale qui, au premier abord, focalisent l attention
LE COUPLE MOTEUR Quelles sont les caractéristiques essentielles d un véhicule à moteur? Les services marketing le savent, c est la puissance et la vitesse maximale qui, au premier abord, focalisent l attention
1 Définition. 2 Systèmes matériels et solides. 3 Les actions mécaniques. Le système matériel : Il peut être un ensemble.un sous-ensemble..
 1 Définition GÉNÉRALITÉS Statique 1 2 Systèmes matériels et solides Le système matériel : Il peut être un ensemble.un sous-ensemble..une pièce mais aussi un liquide ou un gaz Le solide : Il est supposé
1 Définition GÉNÉRALITÉS Statique 1 2 Systèmes matériels et solides Le système matériel : Il peut être un ensemble.un sous-ensemble..une pièce mais aussi un liquide ou un gaz Le solide : Il est supposé
Test : principe fondamental de la dynamique et aspect énergétique
 Durée : 45 minutes Objectifs Test : principe fondamental de la dynamique et aspect énergétique Projection de forces. Calcul de durée d'accélération / décélération ou d'accélération / décélération ou de
Durée : 45 minutes Objectifs Test : principe fondamental de la dynamique et aspect énergétique Projection de forces. Calcul de durée d'accélération / décélération ou d'accélération / décélération ou de
LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE
 LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE 2. L EFFET GYROSCOPIQUE Les lois physiques qui régissent le mouvement des véhicules terrestres sont des lois universelles qui s appliquent
LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE 2. L EFFET GYROSCOPIQUE Les lois physiques qui régissent le mouvement des véhicules terrestres sont des lois universelles qui s appliquent
Chapitre 7 : Intégration sur un intervalle quelconque
 Universités Paris 6 et Paris 7 M1 MEEF Analyse (UE 3) 2013-2014 Chapitre 7 : Intégration sur un intervalle quelconque 1 Fonctions intégrables Définition 1 Soit I R un intervalle et soit f : I R + une fonction
Universités Paris 6 et Paris 7 M1 MEEF Analyse (UE 3) 2013-2014 Chapitre 7 : Intégration sur un intervalle quelconque 1 Fonctions intégrables Définition 1 Soit I R un intervalle et soit f : I R + une fonction
Calcul intégral élémentaire en plusieurs variables
 Calcul intégral élémentaire en plusieurs variables PC*2 2 septembre 2009 Avant-propos À part le théorème de Fubini qui sera démontré dans le cours sur les intégrales à paramètres et qui ne semble pas explicitement
Calcul intégral élémentaire en plusieurs variables PC*2 2 septembre 2009 Avant-propos À part le théorème de Fubini qui sera démontré dans le cours sur les intégrales à paramètres et qui ne semble pas explicitement
MOTO ELECTRIQUE. CPGE / Sciences Industrielles pour l Ingénieur TD06_08 Moto électrique DIAGRAMME DES INTER-ACTEURS UTILISATEUR ENVIRONNEMENT HUMAIN
 MOTO ELECTRIQUE MISE EN SITUATION La moto électrique STRADA EVO 1 est fabriquée par une société SUISSE, située à LUGANO. Moyen de transport alternatif, peut-être la solution pour concilier contraintes
MOTO ELECTRIQUE MISE EN SITUATION La moto électrique STRADA EVO 1 est fabriquée par une société SUISSE, située à LUGANO. Moyen de transport alternatif, peut-être la solution pour concilier contraintes
Quantité de mouvement et moment cinétique
 6 Quantité de mouvement et moment cinétique v7 p = mv L = r p 1 Impulsion et quantité de mouvement Une force F agit sur un corps de masse m, pendant un temps Δt. La vitesse du corps varie de Δv = v f -
6 Quantité de mouvement et moment cinétique v7 p = mv L = r p 1 Impulsion et quantité de mouvement Une force F agit sur un corps de masse m, pendant un temps Δt. La vitesse du corps varie de Δv = v f -
Actions de réduction de bruit sur un moteur poids lourd
 10 Actions de réduction de bruit sur un moteur poids lourd Laurent Moulin, Renault VI, 99, route de Lyon, 69802 Saint Priest, e-mail : [email protected] D epuis 1974 à aujourd hui, la réglementation
10 Actions de réduction de bruit sur un moteur poids lourd Laurent Moulin, Renault VI, 99, route de Lyon, 69802 Saint Priest, e-mail : [email protected] D epuis 1974 à aujourd hui, la réglementation
ventilation Caisson de ventilation : MV
 ventilation Caisson de ventilation : MV FTE 101 148 C Septembre 2012 MV caisson de ventilation économique Descriptif technique Encombrement, réservation et poids Ø X Y Z H h A B Poids (kg) MV5-6P 248 450
ventilation Caisson de ventilation : MV FTE 101 148 C Septembre 2012 MV caisson de ventilation économique Descriptif technique Encombrement, réservation et poids Ø X Y Z H h A B Poids (kg) MV5-6P 248 450
Cinétique et dynamique des systèmes de solides
 Cinétique et dynamique des systèmes de solides Page 2/30 CINÉTIQUE des systèmes matériels... 3 1.) Notion de masse...3 2.) Centre de masse d'un ensemble matériel...4 3.) Torseurs cinétique et dynamique...6
Cinétique et dynamique des systèmes de solides Page 2/30 CINÉTIQUE des systèmes matériels... 3 1.) Notion de masse...3 2.) Centre de masse d'un ensemble matériel...4 3.) Torseurs cinétique et dynamique...6
Chapitre 2 : Caractéristiques du mouvement d un solide
 Chapitre 2 : Caractéristiques du mouvement d un solide I Rappels : Référentiel : Le mouvement d un corps est décris par rapport à un corps de référence et dépend du choix de ce corps. Ce corps de référence
Chapitre 2 : Caractéristiques du mouvement d un solide I Rappels : Référentiel : Le mouvement d un corps est décris par rapport à un corps de référence et dépend du choix de ce corps. Ce corps de référence
ARCHITECTURE MOTEUR EP6DT ET EP6
 CENTRE INTERNATIONAL DE FORMATION CITROËN ARCHITECTURE MOTEUR EP6DT ET EP6 AUTOMOBILES CITROËN S.A. au capital de 16 000 000 R.C.S. Paris 642 050 199 Siège Social : Immeuble Colisée III 12, rue Fructidor
CENTRE INTERNATIONAL DE FORMATION CITROËN ARCHITECTURE MOTEUR EP6DT ET EP6 AUTOMOBILES CITROËN S.A. au capital de 16 000 000 R.C.S. Paris 642 050 199 Siège Social : Immeuble Colisée III 12, rue Fructidor
Exercices - Nombres complexes : corrigé. Formes algébriques et trigonométriques, module et argument
 Formes algébriques et trigonométriques, module et argument Exercice - - L/Math Sup - On multiplie le dénominateur par sa quantité conjuguée, et on obtient : Z = 4 i 3 + i 3 i 3 = 4 i 3 + 3 = + i 3. Pour
Formes algébriques et trigonométriques, module et argument Exercice - - L/Math Sup - On multiplie le dénominateur par sa quantité conjuguée, et on obtient : Z = 4 i 3 + i 3 i 3 = 4 i 3 + 3 = + i 3. Pour
T.P. 7 : Définir et contrôler un système d allumage statique
 T.P. 7 : Définir et contrôler un système d allumage statique Nom : Prénom : Classe : Date : Durée : 6 heures Zone de travail : Classe de cours et atelier Objectif du T.P. : - Être capable d identifier
T.P. 7 : Définir et contrôler un système d allumage statique Nom : Prénom : Classe : Date : Durée : 6 heures Zone de travail : Classe de cours et atelier Objectif du T.P. : - Être capable d identifier
supports métalliques basse fréquence gamme "Polycal-Ressort" standard définition R P 3 5-4 1
 supports métalliques basse fréquence définition E V K J L D e Ød (x2) U G R M Ho série RP3 Isolateurs de vibrations basses fréquences à chargement vertical entièrement métallique. Endurance et fiabilité
supports métalliques basse fréquence définition E V K J L D e Ød (x2) U G R M Ho série RP3 Isolateurs de vibrations basses fréquences à chargement vertical entièrement métallique. Endurance et fiabilité
MOTEURS A DEUX TEMPS Comment fonctionnent-ils?
 MOTEURS A DEUX TEMPS Comment fonctionnent-ils? Ce n est pas un hasard si, en modélisme, les moteurs à deux temps sont utilisés dans 95% des cas. Le deux temps est un moteur très simple quant à sa composition;
MOTEURS A DEUX TEMPS Comment fonctionnent-ils? Ce n est pas un hasard si, en modélisme, les moteurs à deux temps sont utilisés dans 95% des cas. Le deux temps est un moteur très simple quant à sa composition;
CONCOURS COMMUNS POLYTECHNIQUES
 CONCOURS COMMUNS POLYTECHNIQUES SYSTÈME DE LEVAGE À MULTIPLES COLONNES Les sociétés de transports publics des grandes agglomérations gèrent des réseaux comportant des bus et/ou des tramways. Ces sociétés
CONCOURS COMMUNS POLYTECHNIQUES SYSTÈME DE LEVAGE À MULTIPLES COLONNES Les sociétés de transports publics des grandes agglomérations gèrent des réseaux comportant des bus et/ou des tramways. Ces sociétés
Monte charge de cuisine PRESENTATION DU MONTE CHARGE
 Nom.. Prénom.. Monte charge de cuisine Réalisation /0 Mise en service /0 Dépannage /0 PRESENTATION DU MONTE CHARGE M ~ S0 (Atu) S (appel pour monter) S (descente) H (descendez les déchets S.V.P.!) Sh Salle
Nom.. Prénom.. Monte charge de cuisine Réalisation /0 Mise en service /0 Dépannage /0 PRESENTATION DU MONTE CHARGE M ~ S0 (Atu) S (appel pour monter) S (descente) H (descendez les déchets S.V.P.!) Sh Salle
Chapitre 0 Introduction à la cinématique
 Chapitre 0 Introduction à la cinématique Plan Vitesse, accélération Coordonnées polaires Exercices corrigés Vitesse, Accélération La cinématique est l étude du mouvement Elle suppose donc l existence à
Chapitre 0 Introduction à la cinématique Plan Vitesse, accélération Coordonnées polaires Exercices corrigés Vitesse, Accélération La cinématique est l étude du mouvement Elle suppose donc l existence à
PRINCIPE DE FONCTIONNEMENT DU MOTEUR 4 TEMPS
 PRINCIPE DE FONCTIONNEMENT DU MOTEUR 4 TEMPS I:PRINCIPE DE BASE. 1-1:Situation problème. Lorsque nous voulons déplacer un véhicule manuellement, il est plus facile de le déplacer en créant une force sur
PRINCIPE DE FONCTIONNEMENT DU MOTEUR 4 TEMPS I:PRINCIPE DE BASE. 1-1:Situation problème. Lorsque nous voulons déplacer un véhicule manuellement, il est plus facile de le déplacer en créant une force sur
SCIENCES INDUSTRIELLES (S.I.)
") SESSION 2014 PSISI07 EPREUVE SPECIFIQUE - FILIERE PSI " SCIENCES INDUSTRIELLES (S.I.) Durée : 4 heures " N.B. : Le candidat attachera la plus grande importance à la clarté, à la précision et à la concision
SESSION 2014 PSISI07 EPREUVE SPECIFIQUE - FILIERE PSI " SCIENCES INDUSTRIELLES (S.I.) Durée : 4 heures " N.B. : Le candidat attachera la plus grande importance à la clarté, à la précision et à la concision
Représentation géométrique d un nombre complexe
 CHAPITRE 1 NOMBRES COMPLEXES 1 Représentation géométrique d un nombre complexe 1. Ensemble des nombres complexes Soit i le nombre tel que i = 1 L ensemble des nombres complexes est l ensemble des nombres
CHAPITRE 1 NOMBRES COMPLEXES 1 Représentation géométrique d un nombre complexe 1. Ensemble des nombres complexes Soit i le nombre tel que i = 1 L ensemble des nombres complexes est l ensemble des nombres
véhicule hybride (première
 La motorisation d un véhicule hybride (première HERVÉ DISCOURS [1] La cherté et la raréfaction du pétrole ainsi que la sensibilisation du public à l impact de son exploitation sur l environnement conduisent
La motorisation d un véhicule hybride (première HERVÉ DISCOURS [1] La cherté et la raréfaction du pétrole ainsi que la sensibilisation du public à l impact de son exploitation sur l environnement conduisent
STATIQUE GRAPHIQUE ET STATIQUE ANALYTIQUE
 ÉCOLE D'INGÉNIEURS DE FRIBOURG (E.I.F.) SECTION DE MÉCANIQUE G.R. Nicolet, revu en 2006 STATIQUE GRAPHIQUE ET STATIQUE ANALYTIQUE Eléments de calcul vectoriel Opérations avec les forces Equilibre du point
ÉCOLE D'INGÉNIEURS DE FRIBOURG (E.I.F.) SECTION DE MÉCANIQUE G.R. Nicolet, revu en 2006 STATIQUE GRAPHIQUE ET STATIQUE ANALYTIQUE Eléments de calcul vectoriel Opérations avec les forces Equilibre du point
Oscillations libres des systèmes à deux degrés de liberté
 Chapitre 4 Oscillations libres des systèmes à deux degrés de liberté 4.1 Introduction Les systèmes qui nécessitent deux coordonnées indépendantes pour spécifier leurs positions sont appelés systèmes à
Chapitre 4 Oscillations libres des systèmes à deux degrés de liberté 4.1 Introduction Les systèmes qui nécessitent deux coordonnées indépendantes pour spécifier leurs positions sont appelés systèmes à
CREATING POWER SOLUTIONS. 1D42 1D42C 1D50 1D81 1D81C 1D90 1D90V. Moteurs diesel Hatz. www.hatz-diesel.com
 CREATING POWER SOLUTIONS. 1D42 1D42C 1D81 1D81C 1D90 1D90V Moteurs diesel Hatz www.hatz-diesel.com 1D42C et 1D81C - SilentPack Depuis des décennies, les "Silentpacks" (packs Silence) Hatz posent les jalons
CREATING POWER SOLUTIONS. 1D42 1D42C 1D81 1D81C 1D90 1D90V Moteurs diesel Hatz www.hatz-diesel.com 1D42C et 1D81C - SilentPack Depuis des décennies, les "Silentpacks" (packs Silence) Hatz posent les jalons
AUTRES ASPECTS DU GPS. Partie I : tolérance de Battement Partie II : tolérancement par frontières
 AUTRES ASPECTS DU GPS Partie I : tolérance de Battement Partie II : tolérancement par frontières 1 Partie I Tolérance de battement Défaut de Battement Défautconjuguéde forme, orientation et position, constatélorsde
AUTRES ASPECTS DU GPS Partie I : tolérance de Battement Partie II : tolérancement par frontières 1 Partie I Tolérance de battement Défaut de Battement Défautconjuguéde forme, orientation et position, constatélorsde
Mathématiques et petites voitures
 Mathématiques et petites voitures Thomas Lefebvre 10 avril 2015 Résumé Ce document présente diérentes applications des mathématiques dans le domaine du slot-racing. Table des matières 1 Périmètre et circuit
Mathématiques et petites voitures Thomas Lefebvre 10 avril 2015 Résumé Ce document présente diérentes applications des mathématiques dans le domaine du slot-racing. Table des matières 1 Périmètre et circuit
F411 - Courbes Paramétrées, Polaires
 1/43 Courbes Paramétrées Courbes polaires Longueur d un arc, Courbure F411 - Courbes Paramétrées, Polaires Michel Fournié [email protected] http://www.math.univ-toulouse.fr/ fournie/ Année 2012/2013
1/43 Courbes Paramétrées Courbes polaires Longueur d un arc, Courbure F411 - Courbes Paramétrées, Polaires Michel Fournié [email protected] http://www.math.univ-toulouse.fr/ fournie/ Année 2012/2013
Série limitée Classe C 250 CDI BlueEFFICIENCY Prime Edition
 Série limitée Classe C 250 CDI BlueEFFICIENCY Prime Edition Mercedes-Benz France amorce en octobre 2008 le début de la commercialisation de la Classe C 250 CDI, sous la forme d une série limitée baptisée
Série limitée Classe C 250 CDI BlueEFFICIENCY Prime Edition Mercedes-Benz France amorce en octobre 2008 le début de la commercialisation de la Classe C 250 CDI, sous la forme d une série limitée baptisée
Plaques vibrantes. Modèles unidirectionnels ou reversibles. www.multiquip.com
 Plaques vibrantes Modèles unidirectionnels ou reversibles www.multiquip.com Plaques vibrantes unidirectionnelles Les compacteurs Mikasa de Multiquip sont reconnus comme étant la norme de l'industrie de
Plaques vibrantes Modèles unidirectionnels ou reversibles www.multiquip.com Plaques vibrantes unidirectionnelles Les compacteurs Mikasa de Multiquip sont reconnus comme étant la norme de l'industrie de
Diesel KDI. 55-100 kw
 Diesel KDI - 100 kw KDI 34. Unique, et ce pour plusieurs raisons LA PLUS FAIBLE CONSOMMATION DE SA CATÉGORIE Le nouveau KDI 34 offre des consommations de carburant de plus de 10 % inférieures aux autres
Diesel KDI - 100 kw KDI 34. Unique, et ce pour plusieurs raisons LA PLUS FAIBLE CONSOMMATION DE SA CATÉGORIE Le nouveau KDI 34 offre des consommations de carburant de plus de 10 % inférieures aux autres
Etude du SIMULATEUR DE VOL «FLY-HO»
 ECOLE NATIONALE DE L AVIATION CIVILE Session 212 CONCOURS DE RECRUTEMENT D ELEVES INGENIEURS DU CONTROLE DE LA NAVIGATION AERIENNE Epreuve optionnelle obligatoire de SCIENCES INDUSTRIELLES POUR L INGENIEUR
ECOLE NATIONALE DE L AVIATION CIVILE Session 212 CONCOURS DE RECRUTEMENT D ELEVES INGENIEURS DU CONTROLE DE LA NAVIGATION AERIENNE Epreuve optionnelle obligatoire de SCIENCES INDUSTRIELLES POUR L INGENIEUR
Premier principe de la thermodynamique - conservation de l énergie
 Chapitre 5 Premier principe de la thermodynamique - conservation de l énergie 5.1 Bilan d énergie 5.1.1 Énergie totale d un système fermé L énergie totale E T d un système thermodynamique fermé de masse
Chapitre 5 Premier principe de la thermodynamique - conservation de l énergie 5.1 Bilan d énergie 5.1.1 Énergie totale d un système fermé L énergie totale E T d un système thermodynamique fermé de masse
L ANALYSE EN COMPOSANTES PRINCIPALES (A.C.P.) Pierre-Louis GONZALEZ
 Pierre-Louis GONZALEZ") L ANALYSE EN COMPOSANTES PRINCIPALES (A.C.P.) Pierre-Louis GONZALEZ INTRODUCTION Données : n individus observés sur p variables quantitatives. L A.C.P. permet d eplorer les liaisons entre variables et
L ANALYSE EN COMPOSANTES PRINCIPALES (A.C.P.) Pierre-Louis GONZALEZ INTRODUCTION Données : n individus observés sur p variables quantitatives. L A.C.P. permet d eplorer les liaisons entre variables et
TSTI 2D CH X : Exemples de lois à densité 1
 TSTI 2D CH X : Exemples de lois à densité I Loi uniforme sur ab ; ) Introduction Dans cette activité, on s intéresse à la modélisation du tirage au hasard d un nombre réel de l intervalle [0 ;], chacun
TSTI 2D CH X : Exemples de lois à densité I Loi uniforme sur ab ; ) Introduction Dans cette activité, on s intéresse à la modélisation du tirage au hasard d un nombre réel de l intervalle [0 ;], chacun
Exercices - Fonctions de plusieurs variables : corrigé. Pour commencer
 Pour commencer Exercice 1 - Ensembles de définition - Première année - 1. Le logarithme est défini si x + y > 0. On trouve donc le demi-plan supérieur délimité par la droite d équation x + y = 0.. 1 xy
Pour commencer Exercice 1 - Ensembles de définition - Première année - 1. Le logarithme est défini si x + y > 0. On trouve donc le demi-plan supérieur délimité par la droite d équation x + y = 0.. 1 xy
TD 9 Problème à deux corps
 PH1ME2-C Université Paris 7 - Denis Diderot 2012-2013 TD 9 Problème à deux corps 1. Systèmes de deux particules : centre de masse et particule relative. Application à l étude des étoiles doubles Une étoile
PH1ME2-C Université Paris 7 - Denis Diderot 2012-2013 TD 9 Problème à deux corps 1. Systèmes de deux particules : centre de masse et particule relative. Application à l étude des étoiles doubles Une étoile
made in Germany par Schick. Le résultat d'une longue expérience.
 made in Germany par Schick. Le résultat d'une longue expérience. Schick Dental marque son époque. Après plus de 20 ans mis au service du développement et à la fabrication de micromoteurs sans charbons,
made in Germany par Schick. Le résultat d'une longue expérience. Schick Dental marque son époque. Après plus de 20 ans mis au service du développement et à la fabrication de micromoteurs sans charbons,
LE PRODUIT SCALAIRE ( En première S )
") LE PRODUIT SCALAIRE ( En première S ) Dernière mise à jour : Jeudi 4 Janvier 007 Vincent OBATON, Enseignant au lycée Stendhal de Grenoble ( Année 006-007 ) 1 Table des matières 1 Grille d autoévaluation
LE PRODUIT SCALAIRE ( En première S ) Dernière mise à jour : Jeudi 4 Janvier 007 Vincent OBATON, Enseignant au lycée Stendhal de Grenoble ( Année 006-007 ) 1 Table des matières 1 Grille d autoévaluation
CREATING POWER SOLUTIONS. 2L41C 3L41C 3L43C 4L41C 4L42C 4L43C. Moteurs Diesel Hatz. www.hatz-diesel.com
 CREATING POWER SOLUTIONS. 2L41C 3L41C 3L43C 4L41C 4L42C 4L43C Moteurs Diesel Hatz FR www.hatz-diesel.com Recyclage des gaz d'échappement (EGR) Pour satisfaire aux prescriptions relatives aux gaz d échappement
CREATING POWER SOLUTIONS. 2L41C 3L41C 3L43C 4L41C 4L42C 4L43C Moteurs Diesel Hatz FR www.hatz-diesel.com Recyclage des gaz d'échappement (EGR) Pour satisfaire aux prescriptions relatives aux gaz d échappement
EP 2 063 325 A2 (19) (11) EP 2 063 325 A2 (12) DEMANDE DE BREVET EUROPEEN. (43) Date de publication: 27.05.2009 Bulletin 2009/22
 (11) EP 2 063 325 A2 (12) DEMANDE DE BREVET EUROPEEN. (43) Date de publication: 27.05.2009 Bulletin 2009/22") (19) (12) DEMANDE DE BREVET EUROPEEN (11) EP 2 063 325 A2 (43) Date de publication: 27.05.2009 Bulletin 2009/22 (51) Int Cl.: G04B 17/06 (2006.01) G04B 17/34 (2006.01) (21) Numéro de dépôt: 08167317.0
(19) (12) DEMANDE DE BREVET EUROPEEN (11) EP 2 063 325 A2 (43) Date de publication: 27.05.2009 Bulletin 2009/22 (51) Int Cl.: G04B 17/06 (2006.01) G04B 17/34 (2006.01) (21) Numéro de dépôt: 08167317.0
Module d Electricité. 2 ème partie : Electrostatique. Fabrice Sincère (version 3.0.1) http://pagesperso-orange.fr/fabrice.sincere
 http://pagesperso-orange.fr/fabrice.sincere") Module d Electricité 2 ème partie : Electrostatique Fabrice Sincère (version 3.0.1) http://pagesperso-orange.fr/fabrice.sincere 1 Introduction Principaux constituants de la matière : - protons : charge
Module d Electricité 2 ème partie : Electrostatique Fabrice Sincère (version 3.0.1) http://pagesperso-orange.fr/fabrice.sincere 1 Introduction Principaux constituants de la matière : - protons : charge
Erratum de MÉCANIQUE, 6ème édition. Introduction Page xxi (milieu de page) G = 6, 672 59 10 11 m 3 kg 1 s 2
 G = 6, 672 59 10 11 m 3 kg 1 s 2") Introduction Page xxi (milieu de page) G = 6, 672 59 1 11 m 3 kg 1 s 2 Erratum de MÉCANIQUE, 6ème édition Page xxv (dernier tiers de page) le terme de Coriolis est supérieur à 1% du poids) Chapitre 1 Page
Introduction Page xxi (milieu de page) G = 6, 672 59 1 11 m 3 kg 1 s 2 Erratum de MÉCANIQUE, 6ème édition Page xxv (dernier tiers de page) le terme de Coriolis est supérieur à 1% du poids) Chapitre 1 Page
Capteurs. centrales nucléaires. de température pour. performances. fiabilité. Sûreté. La mesure de vos exigences
 Capteurs de température pour centrales nucléaires Sûreté fiabilité performances La mesure de vos exigences Pyro-Contrôle l expertise d un précurseur Dès la fin des années 1970, Pyro-Contrôle s illustre
Capteurs de température pour centrales nucléaires Sûreté fiabilité performances La mesure de vos exigences Pyro-Contrôle l expertise d un précurseur Dès la fin des années 1970, Pyro-Contrôle s illustre
LA PUISSANCE DES MOTEURS. Avez-vous déjà feuilleté le catalogue d un grand constructeur automobile?
 LA PUISSANCE DES MOTEURS Avez-vous déjà feuilleté le catalogue d un grand constructeur automobile? Chaque modèle y est décliné en plusieurs versions, les différences portant essentiellement sur la puissance
LA PUISSANCE DES MOTEURS Avez-vous déjà feuilleté le catalogue d un grand constructeur automobile? Chaque modèle y est décliné en plusieurs versions, les différences portant essentiellement sur la puissance
Cours de Mécanique du point matériel
 Cours de Mécanique du point matériel SMPC1 Module 1 : Mécanique 1 Session : Automne 2014 Prof. M. EL BAZ Cours de Mécanique du Point matériel Chapitre 1 : Complément Mathématique SMPC1 Chapitre 1: Rappels
Cours de Mécanique du point matériel SMPC1 Module 1 : Mécanique 1 Session : Automne 2014 Prof. M. EL BAZ Cours de Mécanique du Point matériel Chapitre 1 : Complément Mathématique SMPC1 Chapitre 1: Rappels
de faible capacité (inférieure ou égale à 75 litres) doivent être certifiés et porter la marque NF électricité performance.
 doivent être certifiés et porter la marque NF électricité performance.") 9.5. PRODUCTION D EAU CHAUDE sanitaire Les équipements doivent être dimensionnés au plus juste en fonction du projet et une étude de faisabilité doit être réalisée pour les bâtiments collectifs d habitation
9.5. PRODUCTION D EAU CHAUDE sanitaire Les équipements doivent être dimensionnés au plus juste en fonction du projet et une étude de faisabilité doit être réalisée pour les bâtiments collectifs d habitation
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE
 BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR ÉPREUVE DU VENDREDI 20 JUIN 2014 Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR ÉPREUVE DU VENDREDI 20 JUIN 2014 Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un
(Exemple ici de calcul pour une Ducati 748 biposto, et également pour un S2R1000, équipé d un disque acier en fond de cloche, et ressorts d origine)
") Analyse de la charge transmise aux roulements de la roue dentée, notamment en rajoutant les efforts axiaux dus aux ressorts de l embrayage (via la cloche) (Exemple ici de calcul pour une Ducati 748 biposto,
Analyse de la charge transmise aux roulements de la roue dentée, notamment en rajoutant les efforts axiaux dus aux ressorts de l embrayage (via la cloche) (Exemple ici de calcul pour une Ducati 748 biposto,
Pump Division MSP. Pompe à vitesse moyenne, verticale, en ligne. Bulletin PS-10-1 (F)
") MSP Pompe à vitesse moyenne, verticale, en ligne Bulletin PS-1-1 (F) Fournisseur de pompes à l échelle mondiale Flowserve est un véritable leader sur le marché mondial des pompes industrielles. Aucun autre
MSP Pompe à vitesse moyenne, verticale, en ligne Bulletin PS-1-1 (F) Fournisseur de pompes à l échelle mondiale Flowserve est un véritable leader sur le marché mondial des pompes industrielles. Aucun autre
Réglementation incendie en ERP
 R. ARTERO, Chef de produits Réglementation incendie en ERP à respecter pour la pose d un bâti-support WC Rappel de vocabulaire et réglementation Résistance au feu La résistance au feu caractérise le comportement
R. ARTERO, Chef de produits Réglementation incendie en ERP à respecter pour la pose d un bâti-support WC Rappel de vocabulaire et réglementation Résistance au feu La résistance au feu caractérise le comportement
Accumuler la chaleur avec des ballons système individuels.
 ÉNERGIES RENOUVELABLES Ballons système Accumuler la chaleur avec des ballons système individuels. BALLON TAMPON BALLON D EAU CHAUDE / CHAUFFE-EAU BALLON COMBINÉ / À PRÉPARATION D EAU CHAUDE INSTANTANÉE
ÉNERGIES RENOUVELABLES Ballons système Accumuler la chaleur avec des ballons système individuels. BALLON TAMPON BALLON D EAU CHAUDE / CHAUFFE-EAU BALLON COMBINÉ / À PRÉPARATION D EAU CHAUDE INSTANTANÉE
Banc d études des structures Etude de résistances de matériaux (RDM) et structures mécaniques
 et structures mécaniques") Banc d études des structures Etude de résistances de matériaux (RDM) et structures mécaniques Descriptif du support pédagogique Le banc d essais des structures permet de réaliser des essais et des études
Banc d études des structures Etude de résistances de matériaux (RDM) et structures mécaniques Descriptif du support pédagogique Le banc d essais des structures permet de réaliser des essais et des études
Système formé de deux points
 MPSI - 2005/2006 - Mécanique II - Système formé de deux points matériels page /5 Système formé de deux points matériels Table des matières Éléments cinétiques. Éléments cinétiques dans R.......................2
MPSI - 2005/2006 - Mécanique II - Système formé de deux points matériels page /5 Système formé de deux points matériels Table des matières Éléments cinétiques. Éléments cinétiques dans R.......................2
Contrôleurs de Débit SIKA
 Contrôleurs de Débit SIKA -1- Contrôleurs de Débit SIKA Antivibration - robuste - application universelle! Contrôleurs de débit à palette VH 780 pour les liquides montage simple pour installation directe
Contrôleurs de Débit SIKA -1- Contrôleurs de Débit SIKA Antivibration - robuste - application universelle! Contrôleurs de débit à palette VH 780 pour les liquides montage simple pour installation directe
Correction du Baccalauréat S Amérique du Nord mai 2007
 Correction du Baccalauréat S Amérique du Nord mai 7 EXERCICE points. Le plan (P) a une pour équation cartésienne : x+y z+ =. Les coordonnées de H vérifient cette équation donc H appartient à (P) et A n
Correction du Baccalauréat S Amérique du Nord mai 7 EXERCICE points. Le plan (P) a une pour équation cartésienne : x+y z+ =. Les coordonnées de H vérifient cette équation donc H appartient à (P) et A n
JONES & SHIPMAN ULTRAMAT Contrôle Easy ou CNC par écran tactile Rectifieuse Cylindrique Universelle
 RECTIFICATION JONES & SHIPMAN ULTRAMAT Contrôle Easy ou CNC par écran tactile Rectifieuse Cylindrique Universelle www.jonesshipman.com www.kellenberger.com ULTRAMAT: Rectifieuses cylindriques universelles
RECTIFICATION JONES & SHIPMAN ULTRAMAT Contrôle Easy ou CNC par écran tactile Rectifieuse Cylindrique Universelle www.jonesshipman.com www.kellenberger.com ULTRAMAT: Rectifieuses cylindriques universelles
Débit de 600 à 660 l/h. USAGE INTENSIF Fiche produit
 Débit de 600 à 660 l/h. USAGE INTENSIF Fiche produit Le est équipé d'une nouvelle pompe robuste à moteur 1450 tr/mi. Ceci assure une durée de vie plus longue ainsi qu'un faible niveau sonore. Il est facile
Débit de 600 à 660 l/h. USAGE INTENSIF Fiche produit Le est équipé d'une nouvelle pompe robuste à moteur 1450 tr/mi. Ceci assure une durée de vie plus longue ainsi qu'un faible niveau sonore. Il est facile
Vanne " Tout ou Rien" à siège incliné Type 3353
 Vanne " Tout ou Rien" à siège incliné Type 3353 Application Vanne "Tout ou Rien" avec servomoteur pneumatique à piston Diamètre nominal DN 15 ( 1 2 ) à 50 (2 ) Pression nominale PN Plage de température
Vanne " Tout ou Rien" à siège incliné Type 3353 Application Vanne "Tout ou Rien" avec servomoteur pneumatique à piston Diamètre nominal DN 15 ( 1 2 ) à 50 (2 ) Pression nominale PN Plage de température
BREVET DE TECHNICIEN SUPÉRIEUR AGRICOLE SUJET
 SESSION 2010 France métropolitaine BREVET DE TECHNICIEN SUPÉRIEUR AGRICOLE ÉPREUVE N 2 DU PREMIER GROUPE ÉPREUVE SCIENTIFIQUE ET TECHNIQUE Option : Génie des équipements agricoles Durée : 3 heures 30 Matériel
SESSION 2010 France métropolitaine BREVET DE TECHNICIEN SUPÉRIEUR AGRICOLE ÉPREUVE N 2 DU PREMIER GROUPE ÉPREUVE SCIENTIFIQUE ET TECHNIQUE Option : Génie des équipements agricoles Durée : 3 heures 30 Matériel
Pour les utilités, le process et l environnement. Les solutions pompes KSB.
 Notre technologie. Votre succès. Pompes n Robinetterie n Service Pour les utilités, le process et l environnement. Les solutions pompes KSB. 2 Solutions d automatisation Les solutions efficaces par KSB
Notre technologie. Votre succès. Pompes n Robinetterie n Service Pour les utilités, le process et l environnement. Les solutions pompes KSB. 2 Solutions d automatisation Les solutions efficaces par KSB
BACCALAURÉAT TECHNOLOGIQUE SESSION 2008 POSITIONNEUR DE PANNEAU SOLAIRE POUR CAMPING-CAR
 BACCALAURÉAT TECHNOLOGIQUE SÉRIE SCIENCES ET TECHNIQUES INDUSTRIELLES GÉNIE ÉLECTROTECHNIQUE SESSION 2008 ÉPREUVE: ÉTUDE DES CONSTRUCTIONS Durée: 4 heures Coefficient : 6 POSITIONNEUR DE PANNEAU SOLAIRE
BACCALAURÉAT TECHNOLOGIQUE SÉRIE SCIENCES ET TECHNIQUES INDUSTRIELLES GÉNIE ÉLECTROTECHNIQUE SESSION 2008 ÉPREUVE: ÉTUDE DES CONSTRUCTIONS Durée: 4 heures Coefficient : 6 POSITIONNEUR DE PANNEAU SOLAIRE
P7669 MACHINE A VAPEUR MINIATURE P7669R A mouvement alternatif P7669T Turbine
 P7669 MACHINE A VAPEUR MINIATURE P7669R A mouvement alternatif P7669T Turbine Caractéristiques Modèle de démonstration d un système à vapeur représentatif d un Système d Alimentation Industriel Appareil
P7669 MACHINE A VAPEUR MINIATURE P7669R A mouvement alternatif P7669T Turbine Caractéristiques Modèle de démonstration d un système à vapeur représentatif d un Système d Alimentation Industriel Appareil
Presses à col de cygne et
 Presses à col de cygne et PRESSEs À ARCADEs BIENVENUE CHEZ SCHULER/BEUTLER. Presses à col de cygne et PRESSEs À ARCADEs. Bienvenu / Presses à col de cygne et PRESSEs À ARCADEs Depuis plus de 175 ans, Schuler
Presses à col de cygne et PRESSEs À ARCADEs BIENVENUE CHEZ SCHULER/BEUTLER. Presses à col de cygne et PRESSEs À ARCADEs. Bienvenu / Presses à col de cygne et PRESSEs À ARCADEs Depuis plus de 175 ans, Schuler
Analyse statique d une pièce
 Analyse statique d une pièce Contrainte de Von Mises sur une chape taillée dans la masse 1 Comportement d un dynamomètre On considère le dynamomètre de forme globalement circulaire, excepté les bossages
Analyse statique d une pièce Contrainte de Von Mises sur une chape taillée dans la masse 1 Comportement d un dynamomètre On considère le dynamomètre de forme globalement circulaire, excepté les bossages
«La solution» DESCRIPTION TECHNIQUE
 «La solution» DESCRIPTION TECHNIQUE P2-f & P4-f - 185/180 - Standard P2-f & P4-f - 170/165 - Compact P2-f & P4-f - 200/195 - Confort MODELE H DH P2f-4f - 185/180 - Standard 340 171 P2f-4f - 170/165 - Compact
«La solution» DESCRIPTION TECHNIQUE P2-f & P4-f - 185/180 - Standard P2-f & P4-f - 170/165 - Compact P2-f & P4-f - 200/195 - Confort MODELE H DH P2f-4f - 185/180 - Standard 340 171 P2f-4f - 170/165 - Compact
Diagnostic de groupes électrogènes diesel par analyse de la vitesse de rotation du vilebrequin
 Diagnostic de groupes électrogènes diesel par analyse de la vitesse de rotation du vilebrequin Mathieu Desbazeille To cite this version: Mathieu Desbazeille. Diagnostic de groupes électrogènes diesel par
Diagnostic de groupes électrogènes diesel par analyse de la vitesse de rotation du vilebrequin Mathieu Desbazeille To cite this version: Mathieu Desbazeille. Diagnostic de groupes électrogènes diesel par
DOSSIER TECHNIQUE XP 12
 DOSSIER TECHNIQUE XP 12 I) Descriptif des éléments principaux Aile XP 12 a) Caractéristiques Surface 12,5 m2 Profil Double surface 90% Envergure 9,2 m Allongement 7,36 Longueur 3,1 m Poids 46 kg Dossier
DOSSIER TECHNIQUE XP 12 I) Descriptif des éléments principaux Aile XP 12 a) Caractéristiques Surface 12,5 m2 Profil Double surface 90% Envergure 9,2 m Allongement 7,36 Longueur 3,1 m Poids 46 kg Dossier
Angles orientés et fonctions circulaires ( En première S )
") Angles orientés et fonctions circulaires ( En première S ) Dernière mise à jour : Jeudi 01 Septembre 010 Vincent OBATON, Enseignant au lycée Stendhal de Grenoble (Année 006-007) Lycée Stendhal, Grenoble
Angles orientés et fonctions circulaires ( En première S ) Dernière mise à jour : Jeudi 01 Septembre 010 Vincent OBATON, Enseignant au lycée Stendhal de Grenoble (Année 006-007) Lycée Stendhal, Grenoble
TUBES ET ACCESSOIRES Serrurier A ailettes Construction Canalisation Spéciaux
 TUBES ET ACCESSOIRES 47 Serrurier A ailettes Construction Canalisation Spéciaux Possibilité d autres sections sur demande. Les caractéristiques indiquées sont théoriques et non garanties. TUBES 48 TUBES
TUBES ET ACCESSOIRES 47 Serrurier A ailettes Construction Canalisation Spéciaux Possibilité d autres sections sur demande. Les caractéristiques indiquées sont théoriques et non garanties. TUBES 48 TUBES
Sommaire buses. Buses
 Sommaire buses Buses Pour tous types de machines hautes pression Pour des canalisations jusqu au Ø 600 mm Efficacité maximale Pour toutes sortes d obstruction Radiales ou rotatives Avec ou sans jet avant
Sommaire buses Buses Pour tous types de machines hautes pression Pour des canalisations jusqu au Ø 600 mm Efficacité maximale Pour toutes sortes d obstruction Radiales ou rotatives Avec ou sans jet avant
Structures algébriques
 Structures algébriques 1. Lois de composition s Soit E un ensemble. Une loi de composition interne sur E est une application de E E dans E. Soient E et F deux ensembles. Une loi de composition externe
Structures algébriques 1. Lois de composition s Soit E un ensemble. Une loi de composition interne sur E est une application de E E dans E. Soient E et F deux ensembles. Une loi de composition externe
LES ESCALIERS. Les mots de l escalier
 Les mots de l escalier L escalier :ouvrage constitué d une suite régulière de plans horizontaux (marches et paliers) permettant, dans une construction, de passer à pied d un étage à un autre. L emmarchement
Les mots de l escalier L escalier :ouvrage constitué d une suite régulière de plans horizontaux (marches et paliers) permettant, dans une construction, de passer à pied d un étage à un autre. L emmarchement
CONCOURS COMMUN 2010 PHYSIQUE
 CONCOUS COMMUN SUJET A DES ÉCOLES DES MINES D ALBI, ALÈS, DOUAI, NANTES Épreuve de Physique-Chimie (toutes filières) Corrigé Barème total points : Physique points - Chimie 68 points PHYSIQUE Partie A :
CONCOUS COMMUN SUJET A DES ÉCOLES DES MINES D ALBI, ALÈS, DOUAI, NANTES Épreuve de Physique-Chimie (toutes filières) Corrigé Barème total points : Physique points - Chimie 68 points PHYSIQUE Partie A :
Le Double Volant Amortisseur
 Le Double Volant Amortisseur Dr.-Ing. Wolfgang Reik Dipl.-Ing. Roland Seebacher Dr.-Ing. Ad Kooy Introduction Les doubles volants amortisseurs (DVA) ont été utilisés pour la première fois en production
Le Double Volant Amortisseur Dr.-Ing. Wolfgang Reik Dipl.-Ing. Roland Seebacher Dr.-Ing. Ad Kooy Introduction Les doubles volants amortisseurs (DVA) ont été utilisés pour la première fois en production
Exprimer ce coefficient de proportionnalité sous forme de pourcentage : 3,5 %
 23 CALCUL DE L INTÉRÊT Tau d intérêt Paul et Rémi ont reçu pour Noël, respectivement, 20 et 80. Ils placent cet argent dans une banque, au même tau. Au bout d une année, ce placement leur rapportera une
23 CALCUL DE L INTÉRÊT Tau d intérêt Paul et Rémi ont reçu pour Noël, respectivement, 20 et 80. Ils placent cet argent dans une banque, au même tau. Au bout d une année, ce placement leur rapportera une
ACL C/L QM 1.0 AERO-CLUB du LIMOUSIN CESSNA F - 150 M. 100 ch., VFR de nuit, Xponder A. Ce document appartient à l Aéro-Club du Limousin
 AERO-CLUB du LIMOUSIN CESSNA F - 150 M 100 ch., VFR de nuit, Xponder A Ce document appartient à l Aéro-Club du Limousin Les procédures (parties encadrées) doivent être effectuées de mémoire VISITE PREVOL
AERO-CLUB du LIMOUSIN CESSNA F - 150 M 100 ch., VFR de nuit, Xponder A Ce document appartient à l Aéro-Club du Limousin Les procédures (parties encadrées) doivent être effectuées de mémoire VISITE PREVOL
T.I.P.E. Optimisation d un. moteur
 LEPLOMB Romain Année universitaire 2004-2005 LE ROI Gautier VERNIER Marine Groupe Sup B, C, D Professeur accompagnateur : M. Guerrier T.I.P.E Optimisation d un moteur 1 1. Présentation du fonctionnement
LEPLOMB Romain Année universitaire 2004-2005 LE ROI Gautier VERNIER Marine Groupe Sup B, C, D Professeur accompagnateur : M. Guerrier T.I.P.E Optimisation d un moteur 1 1. Présentation du fonctionnement
Bac Blanc Terminale ES - Février 2011 Épreuve de Mathématiques (durée 3 heures)
") Bac Blanc Terminale ES - Février 2011 Épreuve de Mathématiques (durée 3 heures) Eercice 1 (5 points) pour les candidats n ayant pas choisi la spécialité MATH Le tableau suivant donne l évolution du chiffre
Bac Blanc Terminale ES - Février 2011 Épreuve de Mathématiques (durée 3 heures) Eercice 1 (5 points) pour les candidats n ayant pas choisi la spécialité MATH Le tableau suivant donne l évolution du chiffre
1 radian. De même, la longueur d un arc de cercle de rayon R et dont l angle au centre a pour mesure α radians est α R. R AB =R.
 Angles orientés Trigonométrie I. Préliminaires. Le radian Définition B R AB =R C O radian R A Soit C un cercle de centre O. Dire que l angle géométrique AOB a pour mesure radian signifie que la longueur
Angles orientés Trigonométrie I. Préliminaires. Le radian Définition B R AB =R C O radian R A Soit C un cercle de centre O. Dire que l angle géométrique AOB a pour mesure radian signifie que la longueur
Collecteur de distribution de fluide
 Collecteur de distribution de fluide Guide des applications Un sous-système prêt-à-monter Des sous-systèmes prêts-à-monter, disponibles en quelques semaines et non en quelques mois. Une conception testée
Collecteur de distribution de fluide Guide des applications Un sous-système prêt-à-monter Des sous-systèmes prêts-à-monter, disponibles en quelques semaines et non en quelques mois. Une conception testée
Corrigé du baccalauréat S Asie 21 juin 2010
 Corrigé du baccalauréat S Asie juin 00 EXERCICE Commun à tous les candidats 4 points. Question : Le triangle GBI est : Réponse a : isocèle. Réponse b : équilatéral. Réponse c : rectangle. On a GB = + =
Corrigé du baccalauréat S Asie juin 00 EXERCICE Commun à tous les candidats 4 points. Question : Le triangle GBI est : Réponse a : isocèle. Réponse b : équilatéral. Réponse c : rectangle. On a GB = + =
* très facile ** facile *** difficulté moyenne **** difficile ***** très difficile I : Incontournable
 Eo7 Fonctions de plusieurs variables Eercices de Jean-Louis Rouget Retrouver aussi cette fiche sur wwwmaths-francefr * très facile ** facile *** difficulté moenne **** difficile ***** très difficile I
Eo7 Fonctions de plusieurs variables Eercices de Jean-Louis Rouget Retrouver aussi cette fiche sur wwwmaths-francefr * très facile ** facile *** difficulté moenne **** difficile ***** très difficile I
Dopez vos usinages de vilebrequins et d arbres à cames
 Dopez vos usinages de vilebrequins et d arbres à cames Accélérez la production de vilebrequins Les vilebrequins sont des composants à nuls autres pareils il n existe pas de pièces qui soient usinées en
Dopez vos usinages de vilebrequins et d arbres à cames Accélérez la production de vilebrequins Les vilebrequins sont des composants à nuls autres pareils il n existe pas de pièces qui soient usinées en
BIFFI. Actionneurs quart de tour à gaz direct, double effet et rappel par ressort Couple de sortie jusqu à 6,500,000 lb.in.
 Actionneurs GIG/GIGS à gaz direct de Biffi BIFFI Actionneurs quart de tour à gaz direct, double effet et rappel par ressort Couple de sortie jusqu à 6,500,000 lb.in. Caractéristiques et avantages Cylindres
Actionneurs GIG/GIGS à gaz direct de Biffi BIFFI Actionneurs quart de tour à gaz direct, double effet et rappel par ressort Couple de sortie jusqu à 6,500,000 lb.in. Caractéristiques et avantages Cylindres
Muret Laurentien MC. Classique et Versatile
 Muret Laurentien MC Classique et Versatile Le muret Laurentien par son look classique s agence à toutes nos gammes de pavé. Qualités et caractéristiques Intégration particulièrement harmonieuse du muret
Muret Laurentien MC Classique et Versatile Le muret Laurentien par son look classique s agence à toutes nos gammes de pavé. Qualités et caractéristiques Intégration particulièrement harmonieuse du muret
Domosol : Système solaire combiné (SSC) de production d eau chaude et chauffage
 de production d eau chaude et chauffage") Domosol : Système solaire combiné (SSC) de production d eau chaude et chauffage Tc Le système solaire combiné (SSC) Domosol de ESE est basé sur le Dynasol 3X-C. Le Dynasol 3X-C est l interface entre les
Domosol : Système solaire combiné (SSC) de production d eau chaude et chauffage Tc Le système solaire combiné (SSC) Domosol de ESE est basé sur le Dynasol 3X-C. Le Dynasol 3X-C est l interface entre les
ANALYSE SPECTRALE. monochromateur
 ht ANALYSE SPECTRALE Une espèce chimique est susceptible d interagir avec un rayonnement électromagnétique. L étude de l intensité du rayonnement (absorbé ou réémis) en fonction des longueurs d ode s appelle
ht ANALYSE SPECTRALE Une espèce chimique est susceptible d interagir avec un rayonnement électromagnétique. L étude de l intensité du rayonnement (absorbé ou réémis) en fonction des longueurs d ode s appelle
Nous fabriquons sur mesure selon vos besoins Avantages Caractéristiques générales 17m 7 arrêts 400 Kg 5 personnes 700 x 625mm
 Nous fabriquons sur mesure selon vos besoins Ascenseur privatif vertical ayant une vitesse jusqu à 0,15 m/s, conçu pour le transport de passagers aux différents niveaux d un immeuble (résidences individuelles,
Nous fabriquons sur mesure selon vos besoins Ascenseur privatif vertical ayant une vitesse jusqu à 0,15 m/s, conçu pour le transport de passagers aux différents niveaux d un immeuble (résidences individuelles,
Electrotechnique: Electricité Avion,
 Electrotechnique: Electricité Avion, La machine à Courant Continu Dr Franck Cazaurang, Maître de conférences, Denis Michaud, Agrégé génie Electrique, Institut de Maintenance Aéronautique UFR de Physique,
Electrotechnique: Electricité Avion, La machine à Courant Continu Dr Franck Cazaurang, Maître de conférences, Denis Michaud, Agrégé génie Electrique, Institut de Maintenance Aéronautique UFR de Physique,
EPFL 2010. TP n 3 Essai oedomètrique. Moncef Radi Sehaqui Hamza - Nguyen Ha-Phong - Ilias Nafaï Weil Florian
 1 EPFL 2010 Moncef Radi Sehaqui Hamza - Nguyen Ha-Phong - Ilia Nafaï Weil Florian 11 Table de matière Ø Introduction 3 Ø Objectif 3 Ø Déroulement de l eai 4 Ø Exécution de deux palier de charge 6 Ø Calcul
1 EPFL 2010 Moncef Radi Sehaqui Hamza - Nguyen Ha-Phong - Ilia Nafaï Weil Florian 11 Table de matière Ø Introduction 3 Ø Objectif 3 Ø Déroulement de l eai 4 Ø Exécution de deux palier de charge 6 Ø Calcul
DOUBLE PARK ECO «La solution» DESCRIPTION TECHNIQUE
 DOUBLE PARK ECO «La solution» DESCRIPTION TECHNIQUE P2-F et P4-F 185 (Modèle standard) P2-F et P4-F 170 MODELE P2/4-F 170 P2/4-F 185 (Standard) P2/4-F 195 P2-F et P4-F 195 H 325 340 350 DH 156 171 181
DOUBLE PARK ECO «La solution» DESCRIPTION TECHNIQUE P2-F et P4-F 185 (Modèle standard) P2-F et P4-F 170 MODELE P2/4-F 170 P2/4-F 185 (Standard) P2/4-F 195 P2-F et P4-F 195 H 325 340 350 DH 156 171 181
10 leçon 2. Leçon n 2 : Contact entre deux solides. Frottement de glissement. Exemples. (PC ou 1 er CU)
") 0 leçon 2 Leçon n 2 : Contact entre deu solides Frottement de glissement Eemples (PC ou er CU) Introduction Contact entre deu solides Liaisons de contact 2 Contact ponctuel 2 Frottement de glissement 2
0 leçon 2 Leçon n 2 : Contact entre deu solides Frottement de glissement Eemples (PC ou er CU) Introduction Contact entre deu solides Liaisons de contact 2 Contact ponctuel 2 Frottement de glissement 2
Z-Axis Compliance Device Compliance en z
 Compensation for different vertical positions Collision recognition in Z-direction Protection of parts and work pieces Monitoring of the insertion forces during assembly operations Monitoring of the picking
Compensation for different vertical positions Collision recognition in Z-direction Protection of parts and work pieces Monitoring of the insertion forces during assembly operations Monitoring of the picking