Vision stéréoscopique
|
|
|
- Raoul Carrière
- il y a 10 ans
- Total affichages :
Transcription
1 January 6, 2015
2 Part I Buts de la stéréovision
3 Objectifs Etant données deux ou plusieurs caméras calibrées, reconstruire un modèle de la scène observée. Intérêt de la vision stéréoscopique: peu cher, sans contrainte sur l environnement, reconstruction dynamique possible

4 Exemples: reconstruction à partir d images aériennes (IGN)

5 Exemples: reconstruction de visages

6 Reconstruction dynamique: virtualized reality (Kanade CMU)

7 La stéréovision en pratique Les vues peuvent être acquises simultanément (banc stéréoscopique, caméras synchronisés) reconstruction possible de scènes dynamiques séquentiellement par une caméra en mouvement reconstruction de scènes statiques

8 Principe de la stéréovision: la triangulation C1 C2

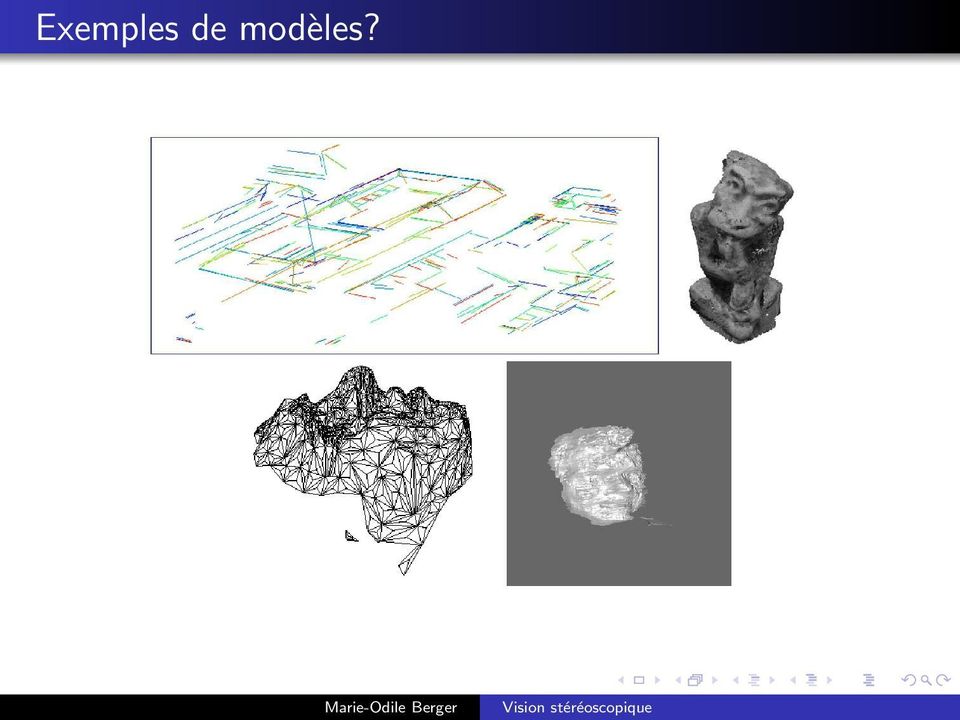
9 Qu est ce qu un modèle? Un ensemble de points 3D non structurés Un ensemble de facettes ou de primitives plus complexes que le point Une surface Un ensemble de voxels



10 Exemples de modèles?
11 Principe de la stéréovision: la triangulation C1 Calibrer les caméras Déterminer des points en correspondance entre les deux images Reconstruire par triangulation L étape de mise en correspondance est, de loin,la plus difficile. Elle est facilité par la contrainte épipolaire qui contraint la recherche du correspondant sur une droite et pas sur toute l image.. C2

12 Part II La géométrie épipolaire
13 Géométrie épipolaire Etant donné un point dans une image, où est son correspondant dans l autre image? ligne epipolaire C epipole contrainte épipolaire: le correspondant d un point appartient à une droite dans l autre vue. La recherche du correspondant est un problème 1D. C


14 Le faisceau épipolaire Quand X varie dans la scène, les épipolaires forment un faisceau dont de base e et e.

15 Des lignes épipolaires


16 Rectification d images Les lignes épipolaires n ont aucune raison d être parallèles. Mais cela facilite la recherche du correspondant. On peut rectifier les images, c est à dire avoir des épipolaires parallèles, si on sait calculer les images correspondant à la scène avec des plans images parallèles

17 Rectification d images On peut générer une image d une scène par rotation autour du centre optique sans connaitre la scène Projeter les images sur un plan parallèle à la ligne de base afin d avoir des vues rectifiées.

18 Rectification d images

19 Part III Le problème de la mise en correspondance

20 Quelles primitives? On peut chercher A avoir une reconstruction dense: i.e une profondeur est calculée pour chaque pixel A avoir une reconstruction éparse de primitives (points, droites ou primitives spécifiques à l environnement)

21 Les algorithmes de mise en correspondance dense Etant donné un point x, x appartient à l épipolaire On utilise ensuite un ensemble de contraintes faibles, le plus souvent vérifier pour aboutir à un seul appariement utilisation de la photométrie: x et x ont des intensités proches (hypothèse de surface lambertienne) Contraintes de voisinage: des points voisins sur l image gauche ont des correspondant voisins sur l image droite contrainte d ordre: l ordre des points est respecté sur les épipolaires
22 Que penser des contraintes faibles? Les contraintes d ordre sont souvent vérifiées presque partout... mais problème au niveau des discontinuités de profondeur
23 Que penser des contraintes faibles? La contrainte d appariement unique: plusieurs appariements peuvent exister (alignements fortuits) il peut n exister aucun appariement (occultation)
24 Analyse des correspondances On peut identifier des Marie-Odile correspondants, Berger Visionsurtout stéréoscopique au niveau des Considérons des images rectifiées et le profil d intensité sur des épipolaires homologues
25 La mise en correspondance par corrélation principe: étant donné un point m 1, déterminer le point m 2 de l image 2 tel que les intensités dans un voisinage (fenêtre rectangulaire) de m 1 et de m 2 soient semblables. Il suffit de calculer la coorélation le long de l épiplaire. Pour des images rectifiées: C(τ) = 1 K i=+n j=+p (I 1(u 0+i,v 0+j) I 1(u 0,v 0))(I 2(u 0+i+τ,v 0+j) I 2(u 0 +τ,v 0)) i= N j= P avec K = (2N +1) (2P +1) σ 1(u 0,v 0)σ 2(u 0,v 0). C passe par un maximum pour τ = τ 0 = disparite RQ: la correlation est invariante à un changement affine d intensité.
26 La mise en correspondance par corrélation
27 La mise en correspondance par corrélation
28 Les limites de la corrélation
29 Les limites de la corrélation
30 Influence de la taille de la fenêtre Exemples de calcul de disparité avec deux fenêtres de taille 3 et 20. petite fenêtre: plus de détails grande fenêtre: moins d erreurs isolées
31 Les limites de la corrélation Limitations de la méthode: peu précis si le maximum de τ est épais suppose qu il n y a pas de déformation entre les deux images (vrai si la partie observée correspondant à la scène est parallèle au plan image). Mais des travaux d adaptation de formes de fenêtres existent [Devernay94] avec des paramètres de déformation à optimiser en plus. problèmes aux frontières de discontinuité.
32 Algorithme de mise en correspondance Pour chaque point de l image gauche, calculer un point dans l image droite appartenant à l épipolaire et présentant le score de corrélation le plus haut paramètres à adapter: taille de la fenêtre, disparité maximale d autres contraintes peuvent ensuite être utilisées pour s assurer des contraintes d ordre, ou d un champ de disparité assez régulier ou éviter la contrainte d unicité (utilisation d algorithme de relaxation ou de programmation dynamique permettant d intégrer des contraintes à partir des détections initiales) bien adapté à des scènes relativement fronto parallèles ne présentant pas de trop nombreuses discontinuités de profondeurs
33 Reconstruction stereo: [Yuille & Geiger]
34 Correspondance et stéréo multi-vues Avec n > 2 vues, la phase d appariement est beaucoup plus simple. Vérification d une hypothèse d appariement m 1,m 2 : Le correspondant de cet appariement dans l image 3 est m 3 = ep 13 (m1) ep 23 (m2) vérification de la cohérence photométrique des niveaux de gris. On peut aussi vérifier la cohérence des tangentes : connaissant t 1 et t 2 calcul de la tangente 3D à la courbe. On peut alors vérifier la cohérence avec la tangente calculée sur l image. ep12 ep13 ep23
35 Part IV Améliorer la mise en correspondance
36 Améliorer la carte de disparité En général, on cherche à améliorer la carte initiale de disparités et à la densifier: par optimisation d un critère traduisant une certaine régularité de la disparité par des techniques de propagation: partant d appariements corrects, on parvient à propager l information et à un matching quasi-dense [Lhuillier2002] par la prise en compte des occultations Difficulté: améliorer la régularité de la carte de disparité en respectant les éventuelles discontinuités. Optimiser une fonction intégrant ces contraintes: E data +E smooth Voir [Scharstein2002] pour une revue des techniques de mise en correspondance dense.
37 Utilisation d algorithmes de relaxation [Marr & Poggio] Principe: utiliser et propager des contraintes de voisinage pour éliminer les mauvaises mises en correspondance. soit m i un pixel de l image 1. C(m i,n j ): mesure de la confiance entre m j et tout pixel n j de l image 2. (ex: C(m i,n j ) = 1 si les intensités des deux pixels sont proches et 0 sinon). Algorithme itératif permettant la mise à jour de C et prenant en compte la contrainte de continuité: C k+1 (m i,n j ) = 1 :si le nombre de pixels m i dans un voisinage de m i tel que C k (m i,n j) = 1 pour n j dans un voisinage de n j est supérieur à un certain seuil. (l appariement d un pixel avec un autre doit conduire à un nombre suffisant d appariements entre les voisins de ces deux pixels) 0 sinon
38 La programmation dynamique Mise en correspondance Optimisation d une fonction de coût Pb: déterminer la meilleure mise en correspondance des points de contours sur les épipolaires homologues (images rectifiées). Représentation sous forme d un graphe: (i,j) couple de pixel [image gauche image droite. La mise en correspondance des intervalles [i,i ] sur l image gauche avec [j,j ] sur l image droite est représentée par une ligne. But: déterminer le meilleur chemin de [0,0] à [N 1,M 1]
39 La programmation dynamique contraintes sur le chemin: à cause de la contrainte d ordre, m = [i,j] peut être en relation avec m = [i +1,j +1] ou [i,j +1] ou [i +1,j]. Choix du meilleur chemin: Cout(m,m ) est une fonction dépendant des similarités photométriques ou géométriques entre (i et i ) et (j et j ). Coût global d un chemin de [0,0] à m: C g (m) = min p Pred(m) (C g (p)+cout(p,m))
40 Apparté sur la programmation dynamique un artisan doit fabriquer en 3 mois 4 exemplaires d un même objet. Compte tenu des salaires, des coûts de stockage et de réglage des machines, il calcule le coût global de fabrication de x i meubles (0 x i 4) au cours du mois i (1 i 3). x i problème: minimiser la somme des coûts en respectant x 1 +x 2 +x 3 = 4. solution combinatoire: calculer toutes les solutions et retenir la moins couteuse (5 3 solutions à explorer).
41 Apparté sur la programmation dynamique solution optimale: procéder pas à pas en retenant à chaque pas la solution à moindre coût. c(x,i): coût de la fabrication de x objets en i mois. g(x,i) cout de la fabrication de x objets pendant le mois i. c(x,i) = min y [c(y,i 1)+g(x y,i)] mois 1: cf première ligne du tableau mois 2: c(0,2) = = 20 mois 3 c(1, 2) = min( ,12+10) = 22 } {{ } } {{ } c(2,2) = min(10+16,12+14,15+10) = 25 c(3, 2) = 28 c(4, 2) = 31 c(4,3) = min(c(0,2)+g(4,3),c(1,2)+g(3,3),c(2,2)+g(2,3),c(3,2)+g(1,3 = min(?,22+19,25+17,28+12,31+10) = min(41,42,40,41) = 40
42 Apparté sur la programmation dynamique solution en remontant les calculs: x 3 = 1,x 2 = 2,x 1 = 1. C(x,1) c(x,2) c(4,3) (0) 20 (1) 22 (2) 25 (1) 28 (1) 31 (3) 40 gain réalisé: à chaque étape intermédiaire, seule la meilleure stratégie aboutissant à une situation donnée est conservée pour la suite. Méthode utilisable pour toute recherche de chemins : minimiser Σg(x i,x i+1 )
43 Prise en compte explicite des occultations [Bobick99] Améliorer la recherche du correspondant par des fenêtres adaptées: Substituer la recherche en un point x de disparité d tq d = argmin I L (y,i) I R (y d,i) W(x) W(x d) où i est la cote de l épipolaire de x (images rectifiées) et W(x) est la fenetre centrée autour de x. par d = argmin d,j=1..9 I L (y,i) I R (x d,i) W j (x) W j (x d) où W j (x) est des neuf types de fenetre suivants:
44 Prise en compte des occultations Utiliser des fonctions de coût contenant explicitement un flag classifiant le pixel en occulté ou non occulté: maximiser exp{ ( l,r (M l,r W L l W R r ) +c(1 M l,r ))} ou M l,r = 1 si le pixel a un correspondant, 0 s il n existe pas de correspondant. On impose les contraintes l M l,r = 0 ou 1, r M l,r = 0 ou 1 c est le coût de l occultation c faible impliquera de nombreux pixels sans correspondant c fort pénalisera très fortement les occultations (valeur sensible)
45 Prise en compte des occultations: exemples [Geiger] la disparité classiquement calculée
46 Prise en compte des occultations: exemples [Geiger] Disparité avec contrainte d ordre et d occultation
47 Prise en compte des occultations: exemples [Bobick]
48 Méthodes par propagation [Lhuillier02] Idée: se baser sur un ensemeble de correspondances initiales sûres (seed), obtenues par corrélation. propager des correspondances au voisinage d une semence (x,x ) sous réserve d un contrôle de la disparité par rapport à la semence d éviter la propagation dans des zones uniformes: s(x) > t avec s(x) = max{ I(x + ) I(x), (1,0),( 1,0),(0,1),(0, 1)}
49 Méthodes par propagation
50 Méthodes par propagation: résultats
51 Résultats avec des zones faiblement texturées
52 Gestion des occultations en fonction des semences
53 Méthodes par propagation une méthode intermédiaire entre matching discret et dense, s appuyant sur la nature de l image assez bonne résistance aux outliers (seules les semences fiables sont retenues, la propagation arrête en général l extension de faux matchs par manque de ressemblance) Gestion raisonnable des occultations
54 Pour aller plus loin Techniques de minimisation par graphcuts [boykof03] Pourquoi: les techniques d optimisation de critères sont très lourdes à mettre en oeuvre et il existe de nombreux minima locaux Idée: Trouver des méthodes efficaces d optimisation pour certaines familles de fonction de coût. Par exemples des fonctions de lissage de la forme V(p,q) où p et q sont des pixels adjacents.
55 Part V La triangulation
56 calculer le point 3D En pratique, les deux lignes de vues s intersectent rarement (précision du détecteur 2D)
57 Précision de la reconstruction Plus on considère des objets éloignés, moins la reconstruction est précise. C C
58 Part VI Quelques résultats

59 Influence de la précision de détection [ Blaszka 93]


60 Détecter des structures avec précision [ Blaszka 93]

61 Exemples de reconstruction[ Blaszka 93]
62 Des fenêtre de corrélation adaptées [Devernay] Adapter la forme des fenetres de corrélation dans le cas de surfaces non fronto -parallèles. calculer la dérivée de la disparité en plus des paramètres classiques
63 Des fenêtre de corrélation adaptées [Devernay]
64 Des fenêtre de corrélation adaptées [Devernay]
65 Part VII Exemples d utilisation de la stéréovision
66 Faciliter la mise en correspondance De nombreux systèmes industriels visent à faciliter l extraction des correspondances Mettre des marqueurs faciles à détecter (système VICON) lumière structurée: Projeter des indices (mouchetage, grille) pour avoir des indices faciles à détecter et à mettre encorrespondance dans le visible ou dans l infrarouge. systèmes couplés caméra + plan laser pour avoir des correspondances denses
67 Le système VICON Reconstruction dynamique de marqueurs avec de nombreuses caméras Applications à l analyse du geste sportif, aux effets spéciaux, à la réeducation dans le domaine médical
68 Projection de grille et lumière structurée Idée de base: projecter des structures sur la forme à reconstruire pour faciliter la reconstruction dense (s applique donc aux objets non texturés) Dans le cas d une grille, on récupère également la topologie (lien entre les points) et donc une reconstruction surfacique.
69 Coopération caméra + plan lumineux principe: projeter un plan lumieux à une position et un angle donné sur un objet. La reconstruction se fait à partir d une image car on sait que les points à reconstruire appartienne au plan lumineux qui est connu.
70 Coopération caméra + plan lumineux On peut utiliser des lumières colorées pour faciliter la mise en correpondance
71 Stéréovision multi-vues FACADE: modelisation et rendu architectural à partir de photographies [debevec96] Objectif: A partir d un ensemble d images d un environnement, généner de manière interactive des modèles de scènes qui seront ensuite utilisés pour générer des séquences avec de nouveaux points de vue.
72 Facade Reconstruction et rendu obtenu à partir de 16 images
73 Facade: les étapes Détecter des indices et les mettre en correspondance (combinaison d interaction et de méthodes de détection de lignes) Calcul de la pose des caméras (ou utilisation de cette donnée) Raffinement global du modèle et de la position des caméras pour avoir un modèle précis génération d un modèle texturé
74 Facade: raffinement du modèle Minimisation d une fonction dont les inconnues sont les positions des caméras et le modèle Minimisation de distance(proj(modele),segment Image) avec distance(proj(modele),segment Image) = l 0 h2 (s)ds

75 Facade: texturer le modèle Un point du modèle est reconstruit à partir de plusieurs vues sur des contraintes géométriques. Quelle photométrie lui affecter? En raison des problèmes posés par les surfaces non lambertiennes, utiliser les vues dont la direction de caméra est proche de celle utilisée Pour éviter les transitions, effectuer une pondération des couleurs
76 Facade: composer les images
77 Quelques commentaires Adapter le grain de la reconstruction au grain de l application visée ensuite (le modèle donne la structure, la texture donne le détail) Il existe toujours des trous de reconstruction (combler les trous) Attention aux problèmes d illumination: les positions des sources lumineuses dans les diverses images peuvent etre différente. Mais on peut tenter de reconstruire les sources comme on reconstruit la géométrie.
78 Bibliographie D. Marr and T. Poggio. Cooperative Computation of Stereo Disparity. Science, 194: , R. Deriche and T. Blaszka. Recovering and Characterizing Image Features Using An Efficient Model Based Approach. In Proceedings of IEEE Conference on Computer Vision and Pattern Recognition, New York, NY (USA), pages , June F. Devernay and O. D. Faugeras. Computing Differential Properties of 3D Shapes from Stereoscopic images Without 3D Models. In Proceedings of IEEE Conference on Computer Vision and Pattern Recognition, Seattle, WA (USA), pages , D. Geiger, B. Ladendorf, and A. Yuille. Occlusions and Binocular Stereo. International Journal of Computer Vision, 14: , 1995.
79 Bibliographie P. E. Debevec, C. J. Taylor, and J. Malik. Modeling and Rendering Architecture from Photographs. In Proc. SIGGRAPH, August M. Lhuillier and L. Quan. Match propagation for Image-based modeling and rendering. In IEEE Transactions on PAMI, 24, D. Scharstein and R. Szelisk. A Taxonomy and Evaluation of Dense Two-Frame Stereo Correspondence Algorithms In Int. Journal of Computer Vision, 47, 2002, O. Williams, M. Isard, and J. Cormick. Estimating disparity and occlusions in stereo video sequences. In CVPR 05, 2005.
80 Bibliographie Y. Boykov and V. Kolmogorov. An experimental comparison of min-cut/max-flow algorithms for energy minimization in vision. IEEE Transactions on PAMI, 26(9): , V. Kolmogorov and Y. Boykov. What metrics can be approximated by geo-cuts, or global optimization of length/area and flux. In ICCV 05, Pékin, 2005.
Reconnaissance de visages 2.5D par fusion des indices de texture et de profondeur ICI 12/12/12
 Reconnaissance de visages 2.5D par fusion des indices de texture et de profondeur ICI 12/12/12 2 Discrimination Invariance Expressions faciales Age Pose Eclairage 11/12/2012 3 Personne Inconnue Identité
Reconnaissance de visages 2.5D par fusion des indices de texture et de profondeur ICI 12/12/12 2 Discrimination Invariance Expressions faciales Age Pose Eclairage 11/12/2012 3 Personne Inconnue Identité
Analyse de la vidéo. Chapitre 4.1 - La modélisation pour le suivi d objet. 10 mars 2015. Chapitre 4.1 - La modélisation d objet 1 / 57
 Analyse de la vidéo Chapitre 4.1 - La modélisation pour le suivi d objet 10 mars 2015 Chapitre 4.1 - La modélisation d objet 1 / 57 La représentation d objets Plan de la présentation 1 La représentation
Analyse de la vidéo Chapitre 4.1 - La modélisation pour le suivi d objet 10 mars 2015 Chapitre 4.1 - La modélisation d objet 1 / 57 La représentation d objets Plan de la présentation 1 La représentation
Projet de traitement d'image - SI 381 reconstitution 3D d'intérieur à partir de photographies
 Projet de traitement d'image - SI 381 reconstitution 3D d'intérieur à partir de photographies Régis Boulet Charlie Demené Alexis Guyot Balthazar Neveu Guillaume Tartavel Sommaire Sommaire... 1 Structure
Projet de traitement d'image - SI 381 reconstitution 3D d'intérieur à partir de photographies Régis Boulet Charlie Demené Alexis Guyot Balthazar Neveu Guillaume Tartavel Sommaire Sommaire... 1 Structure
Analyse d images. [email protected]. Edmond Boyer UFRIMA 1
 Analyse d images [email protected] Edmond Boyer UFRIMA 1 1 Généralités Analyse d images (Image Analysis) : utiliser un ordinateur pour interpréter le monde extérieur au travers d images. Images Objets
Analyse d images [email protected] Edmond Boyer UFRIMA 1 1 Généralités Analyse d images (Image Analysis) : utiliser un ordinateur pour interpréter le monde extérieur au travers d images. Images Objets
L analyse d images regroupe plusieurs disciplines que l on classe en deux catégories :
 La vision nous permet de percevoir et d interpreter le monde qui nous entoure. La vision artificielle a pour but de reproduire certaines fonctionnalités de la vision humaine au travers de l analyse d images.
La vision nous permet de percevoir et d interpreter le monde qui nous entoure. La vision artificielle a pour but de reproduire certaines fonctionnalités de la vision humaine au travers de l analyse d images.
R-ICP : une nouvelle approche d appariement 3D orientée régions pour la reconnaissance faciale
 R-ICP : une nouvelle approche d appariement 3D orientée régions pour la reconnaissance faciale Boulbaba BEN AMOR, Karima OUJI, Mohsen ARDABILIAN, et Liming CHEN Laboratoire d InfoRmatique en Images et
R-ICP : une nouvelle approche d appariement 3D orientée régions pour la reconnaissance faciale Boulbaba BEN AMOR, Karima OUJI, Mohsen ARDABILIAN, et Liming CHEN Laboratoire d InfoRmatique en Images et
Traitement bas-niveau
 Plan Introduction L approche contour (frontière) Introduction Objectifs Les traitements ont pour but d extraire l information utile et pertinente contenue dans l image en regard de l application considérée.
Plan Introduction L approche contour (frontière) Introduction Objectifs Les traitements ont pour but d extraire l information utile et pertinente contenue dans l image en regard de l application considérée.
FUSION DE CARTES DE PROFONDEURS EN PHOTOGRAMMETRIE ARCHITECTURALE
 Rapport de Projet Pluridisciplinaire Mastère spécialisé Photogrammétrie, positionnement et mesures de déformations (PPMD) FUSION DE CARTES DE PROFONDEURS EN PHOTOGRAMMETRIE ARCHITECTURALE GARDON Elzbieta
Rapport de Projet Pluridisciplinaire Mastère spécialisé Photogrammétrie, positionnement et mesures de déformations (PPMD) FUSION DE CARTES DE PROFONDEURS EN PHOTOGRAMMETRIE ARCHITECTURALE GARDON Elzbieta
Master IMA - UMPC Paris 6 RDMM - Année 2009-2010 Fiche de TP
 Master IMA - UMPC Paris 6 RDMM - Année 2009-200 Fiche de TP Préliminaires. Récupérez l archive du logiciel de TP à partir du lien suivant : http://www.ensta.fr/~manzaner/cours/ima/tp2009.tar 2. Développez
Master IMA - UMPC Paris 6 RDMM - Année 2009-200 Fiche de TP Préliminaires. Récupérez l archive du logiciel de TP à partir du lien suivant : http://www.ensta.fr/~manzaner/cours/ima/tp2009.tar 2. Développez
Reconstruction de bâtiments en 3D à partir de nuages de points LIDAR
 Reconstruction de bâtiments en 3D à partir de nuages de points LIDAR Mickaël Bergem 25 juin 2014 Maillages et applications 1 Table des matières Introduction 3 1 La modélisation numérique de milieux urbains
Reconstruction de bâtiments en 3D à partir de nuages de points LIDAR Mickaël Bergem 25 juin 2014 Maillages et applications 1 Table des matières Introduction 3 1 La modélisation numérique de milieux urbains
Comparaison de Relevés 3D issus de plusieurs Systèmes de Numérisation
 Laboratoire Vision & Robotique Comparaison de Relevés 3D issus de plusieurs Systèmes de Numérisation Emilie KOENIG, Benjamin ALBOUY, Sylvie TREUILLET, Yves Lucas Contact : Sylvie Treuillet Polytech'Orléans
Laboratoire Vision & Robotique Comparaison de Relevés 3D issus de plusieurs Systèmes de Numérisation Emilie KOENIG, Benjamin ALBOUY, Sylvie TREUILLET, Yves Lucas Contact : Sylvie Treuillet Polytech'Orléans
ANALYSE DU MOUVEMENT HUMAIN PAR VISION ARTIFICIELLE POUR CONSOLES DE JEUX VIDÉOS
 MAHER HANAFI ANALYSE DU MOUVEMENT HUMAIN PAR VISION ARTIFICIELLE POUR CONSOLES DE JEUX VIDÉOS Mémoire présenté à la Faculté des études supérieures et postdoctorales de l Université Laval dans le cadre
MAHER HANAFI ANALYSE DU MOUVEMENT HUMAIN PAR VISION ARTIFICIELLE POUR CONSOLES DE JEUX VIDÉOS Mémoire présenté à la Faculté des études supérieures et postdoctorales de l Université Laval dans le cadre
Synthèse d'images I. Venceslas BIRI IGM Université de Marne La
 Synthèse d'images I Venceslas BIRI IGM Université de Marne La La synthèse d'images II. Rendu & Affichage 1. Introduction Venceslas BIRI IGM Université de Marne La Introduction Objectif Réaliser une image
Synthèse d'images I Venceslas BIRI IGM Université de Marne La La synthèse d'images II. Rendu & Affichage 1. Introduction Venceslas BIRI IGM Université de Marne La Introduction Objectif Réaliser une image
Object Removal by Exemplar-Based Inpainting
 Object Removal by Exemplar-Based Inpainting Kévin Polisano A partir d un article de A. Criminisi, P. Pérez & H. K. Toyama 14/02/2013 Kévin Polisano Object Removal by Exemplar-Based Inpainting 14/02/2013
Object Removal by Exemplar-Based Inpainting Kévin Polisano A partir d un article de A. Criminisi, P. Pérez & H. K. Toyama 14/02/2013 Kévin Polisano Object Removal by Exemplar-Based Inpainting 14/02/2013
UNIVERSITÉ DE MONTRÉAL APPRENTISSAGE DE MODÈLES PROBABILISTES POUR LA VISION STÉRÉOSCOPIQUE EN TEMPS RÉEL
 UNIVERSITÉ DE MONTRÉAL APPRENTISSAGE DE MODÈLES PROBABILISTES POUR LA VISION STÉRÉOSCOPIQUE EN TEMPS RÉEL LUCAS BERTHOU DÉPARTEMENT DE GÉNIE INFORMATIQUE ET GÉNIE LOGICIEL ÉCOLE POLYTECHNIQUE DE MONTRÉAL
UNIVERSITÉ DE MONTRÉAL APPRENTISSAGE DE MODÈLES PROBABILISTES POUR LA VISION STÉRÉOSCOPIQUE EN TEMPS RÉEL LUCAS BERTHOU DÉPARTEMENT DE GÉNIE INFORMATIQUE ET GÉNIE LOGICIEL ÉCOLE POLYTECHNIQUE DE MONTRÉAL
Algorithme des fourmis appliqué à la détection et au suivi de contours dans une image
 IN52-IN54 A2008 Algorithme des fourmis appliqué à la détection et au suivi de contours dans une image Etudiants : Nicolas MONNERET Alexandre HAFFNER Sébastien DE MELO Responsable : Franck GECHTER Sommaire
IN52-IN54 A2008 Algorithme des fourmis appliqué à la détection et au suivi de contours dans une image Etudiants : Nicolas MONNERET Alexandre HAFFNER Sébastien DE MELO Responsable : Franck GECHTER Sommaire
Les algorithmes de base du graphisme
 Les algorithmes de base du graphisme Table des matières 1 Traçage 2 1.1 Segments de droites......................... 2 1.1.1 Algorithmes simples.................... 3 1.1.2 Algorithmes de Bresenham (1965).............
Les algorithmes de base du graphisme Table des matières 1 Traçage 2 1.1 Segments de droites......................... 2 1.1.1 Algorithmes simples.................... 3 1.1.2 Algorithmes de Bresenham (1965).............
de calibration Master 2: Calibration de modèles: présentation et simulation d
 Master 2: Calibration de modèles: présentation et simulation de quelques problèmes de calibration Plan de la présentation 1. Présentation de quelques modèles à calibrer 1a. Reconstruction d une courbe
Master 2: Calibration de modèles: présentation et simulation de quelques problèmes de calibration Plan de la présentation 1. Présentation de quelques modèles à calibrer 1a. Reconstruction d une courbe
Programmation Linéaire - Cours 1
 Programmation Linéaire - Cours 1 P. Pesneau [email protected] Université Bordeaux 1 Bât A33 - Bur 265 Ouvrages de référence V. Chvátal - Linear Programming, W.H.Freeman, New York, 1983.
Programmation Linéaire - Cours 1 P. Pesneau [email protected] Université Bordeaux 1 Bât A33 - Bur 265 Ouvrages de référence V. Chvátal - Linear Programming, W.H.Freeman, New York, 1983.
Géométrie discrète Chapitre V
 Géométrie discrète Chapitre V Introduction au traitement d'images Géométrie euclidienne : espace continu Géométrie discrète (GD) : espace discrétisé notamment en grille de pixels GD définition des objets
Géométrie discrète Chapitre V Introduction au traitement d'images Géométrie euclidienne : espace continu Géométrie discrète (GD) : espace discrétisé notamment en grille de pixels GD définition des objets
La visio-conférence holographique : Pourquoi? Comment?
 La visio-conférence holographique : Pourquoi? Comment? Francis Felix Labo LSIS / Arts & Métiers Paritech (ENSAM) 2 Cours des Arts et Métiers 13100 Aix-en-Provence Thierry Henocque AIP-Primeca Dauphiné
La visio-conférence holographique : Pourquoi? Comment? Francis Felix Labo LSIS / Arts & Métiers Paritech (ENSAM) 2 Cours des Arts et Métiers 13100 Aix-en-Provence Thierry Henocque AIP-Primeca Dauphiné
Préparé au Laboratoire d Analyse et d Architecture des Systèmes du CNRS
 Année 2004 THESE Préparé au Laboratoire d Analyse et d Architecture des Systèmes du CNRS En vue de l obtention du titre de Docteur de l Institut National Polytechnique de Toulouse Spécialité : Informatique
Année 2004 THESE Préparé au Laboratoire d Analyse et d Architecture des Systèmes du CNRS En vue de l obtention du titre de Docteur de l Institut National Polytechnique de Toulouse Spécialité : Informatique
Opérations de base sur ImageJ
 Opérations de base sur ImageJ TPs d hydrodynamique de l ESPCI, J. Bico, M. Reyssat, M. Fermigier ImageJ est un logiciel libre, qui fonctionne aussi bien sous plate-forme Windows, Mac ou Linux. Initialement
Opérations de base sur ImageJ TPs d hydrodynamique de l ESPCI, J. Bico, M. Reyssat, M. Fermigier ImageJ est un logiciel libre, qui fonctionne aussi bien sous plate-forme Windows, Mac ou Linux. Initialement
VISUALISATION DE NUAGES DE POINTS
 ARNAUD BLETTERER MULTI-RÉSOLUTION 1/16 VISUALISATION DE NUAGES DE POINTS MULTI-RÉSOLUTION AU TRAVERS DE CARTES DE PROFONDEUR Arnaud Bletterer Université de Nice Sophia Antipolis Laboratoire I3S - Cintoo
ARNAUD BLETTERER MULTI-RÉSOLUTION 1/16 VISUALISATION DE NUAGES DE POINTS MULTI-RÉSOLUTION AU TRAVERS DE CARTES DE PROFONDEUR Arnaud Bletterer Université de Nice Sophia Antipolis Laboratoire I3S - Cintoo
3 Approximation de solutions d équations
 3 Approximation de solutions d équations Une équation scalaire a la forme générale f(x) =0où f est une fonction de IR dans IR. Un système de n équations à n inconnues peut aussi se mettre sous une telle
3 Approximation de solutions d équations Une équation scalaire a la forme générale f(x) =0où f est une fonction de IR dans IR. Un système de n équations à n inconnues peut aussi se mettre sous une telle
Kardó. Une combinaison infinie de lumiere
 Kardó Une combinaison infinie de lumiere CONCEPT Design: eer architectural design, Belgique 2 - Kardó Kardó est un système d éclairage spécial qui permet de s adapter à l architecture à travers tout le
Kardó Une combinaison infinie de lumiere CONCEPT Design: eer architectural design, Belgique 2 - Kardó Kardó est un système d éclairage spécial qui permet de s adapter à l architecture à travers tout le
Art Graphique & Patrimoine Savoir faire et technologie au service du patrimoine
 1 Numérisation 3D monumental Géoréférencement tachéométrique Relevé photogrammétrique Relevé lasergrammétrique: Laser pulsé Laser temps de vol Laser à décalage de phase Laser et triangulation optique Laser
1 Numérisation 3D monumental Géoréférencement tachéométrique Relevé photogrammétrique Relevé lasergrammétrique: Laser pulsé Laser temps de vol Laser à décalage de phase Laser et triangulation optique Laser
Capacité d un canal Second Théorème de Shannon. Théorie de l information 1/34
 Capacité d un canal Second Théorème de Shannon Théorie de l information 1/34 Plan du cours 1. Canaux discrets sans mémoire, exemples ; 2. Capacité ; 3. Canaux symétriques ; 4. Codage de canal ; 5. Second
Capacité d un canal Second Théorème de Shannon Théorie de l information 1/34 Plan du cours 1. Canaux discrets sans mémoire, exemples ; 2. Capacité ; 3. Canaux symétriques ; 4. Codage de canal ; 5. Second
Modélisation multi-agents - Agents réactifs
 Modélisation multi-agents - Agents réactifs Syma cursus CSI / SCIA Julien Saunier - [email protected] Sources www-lih.univlehavre.fr/~olivier/enseignement/masterrecherche/cours/ support/algofourmis.pdf
Modélisation multi-agents - Agents réactifs Syma cursus CSI / SCIA Julien Saunier - [email protected] Sources www-lih.univlehavre.fr/~olivier/enseignement/masterrecherche/cours/ support/algofourmis.pdf
Programmation linéaire
 Programmation linéaire DIDIER MAQUIN Ecole Nationale Supérieure d Electricité et de Mécanique Institut National Polytechnique de Lorraine Mathématiques discrètes cours de 2ème année Programmation linéaire
Programmation linéaire DIDIER MAQUIN Ecole Nationale Supérieure d Electricité et de Mécanique Institut National Polytechnique de Lorraine Mathématiques discrètes cours de 2ème année Programmation linéaire
Baccalauréat ES Antilles Guyane 12 septembre 2014 Corrigé
 Baccalauréat ES Antilles Guyane 12 septembre 2014 Corrigé EXERCICE 1 5 points Commun à tous les candidats 1. Réponse c : ln(10)+2 ln ( 10e 2) = ln(10)+ln ( e 2) = ln(10)+2 2. Réponse b : n 13 0,7 n 0,01
Baccalauréat ES Antilles Guyane 12 septembre 2014 Corrigé EXERCICE 1 5 points Commun à tous les candidats 1. Réponse c : ln(10)+2 ln ( 10e 2) = ln(10)+ln ( e 2) = ln(10)+2 2. Réponse b : n 13 0,7 n 0,01
Laboratoire 4 Développement d un système intelligent
 DÉPARTEMENT DE GÉNIE LOGICIEL ET DES TI LOG770 - SYSTÈMES INTELLIGENTS ÉTÉ 2012 Laboratoire 4 Développement d un système intelligent 1 Introduction Ce quatrième et dernier laboratoire porte sur le développement
DÉPARTEMENT DE GÉNIE LOGICIEL ET DES TI LOG770 - SYSTÈMES INTELLIGENTS ÉTÉ 2012 Laboratoire 4 Développement d un système intelligent 1 Introduction Ce quatrième et dernier laboratoire porte sur le développement
Optimisation non linéaire Irène Charon, Olivier Hudry École nationale supérieure des télécommunications
 Optimisation non linéaire Irène Charon, Olivier Hudry École nationale supérieure des télécommunications A. Optimisation sans contrainte.... Généralités.... Condition nécessaire et condition suffisante
Optimisation non linéaire Irène Charon, Olivier Hudry École nationale supérieure des télécommunications A. Optimisation sans contrainte.... Généralités.... Condition nécessaire et condition suffisante
 Utilisation d informations visuelles dynamiques en asservissement visuel Armel Crétual IRISA, projet TEMIS puis VISTA L asservissement visuel géométrique Principe : Réalisation d une tâche robotique par
Utilisation d informations visuelles dynamiques en asservissement visuel Armel Crétual IRISA, projet TEMIS puis VISTA L asservissement visuel géométrique Principe : Réalisation d une tâche robotique par
Simulation de point de vue pour la localisation d une caméra à partir d un modèle non structuré
 Simulation de point de vue pour la localisation d une caméra à partir d un modèle non structuré Pierre Rolin Marie-Odile Berger Frédéric Sur LORIA, UMR CNRS 7503, Université de Lorraine INRIA Nancy Grand
Simulation de point de vue pour la localisation d une caméra à partir d un modèle non structuré Pierre Rolin Marie-Odile Berger Frédéric Sur LORIA, UMR CNRS 7503, Université de Lorraine INRIA Nancy Grand
$SSOLFDWLRQGXNULJHDJHSRXUOD FDOLEUDWLRQPRWHXU
 $SSOLFDWLRQGXNULJHDJHSRXUOD FDOLEUDWLRQPRWHXU Fabien FIGUERES [email protected] 0RWVFOpV : Krigeage, plans d expériences space-filling, points de validations, calibration moteur. 5pVXPp Dans le
$SSOLFDWLRQGXNULJHDJHSRXUOD FDOLEUDWLRQPRWHXU Fabien FIGUERES [email protected] 0RWVFOpV : Krigeage, plans d expériences space-filling, points de validations, calibration moteur. 5pVXPp Dans le
Communications collectives et ordonnancement en régime permanent pour plates-formes hétérogènes
 Loris MARCHAL Laboratoire de l Informatique du Parallélisme Équipe Graal Communications collectives et ordonnancement en régime permanent pour plates-formes hétérogènes Thèse réalisée sous la direction
Loris MARCHAL Laboratoire de l Informatique du Parallélisme Équipe Graal Communications collectives et ordonnancement en régime permanent pour plates-formes hétérogènes Thèse réalisée sous la direction
Annexe 6. Notions d ordonnancement.
 Annexe 6. Notions d ordonnancement. APP3 Optimisation Combinatoire: problèmes sur-contraints et ordonnancement. Mines-Nantes, option GIPAD, 2011-2012. [email protected] Résumé Ce document
Annexe 6. Notions d ordonnancement. APP3 Optimisation Combinatoire: problèmes sur-contraints et ordonnancement. Mines-Nantes, option GIPAD, 2011-2012. [email protected] Résumé Ce document
N. Paparoditis, Laboratoire MATIS
 N. Paparoditis, Laboratoire MATIS Contexte: Diffusion de données et services locaux STEREOPOLIS II Un véhicule de numérisation mobile terrestre Lasers Caméras Système de navigation/positionnement STEREOPOLIS
N. Paparoditis, Laboratoire MATIS Contexte: Diffusion de données et services locaux STEREOPOLIS II Un véhicule de numérisation mobile terrestre Lasers Caméras Système de navigation/positionnement STEREOPOLIS
Vision industrielle et télédétection - Détection d ellipses. Guillaume Martinez 17 décembre 2007
 Vision industrielle et télédétection - Détection d ellipses Guillaume Martinez 17 décembre 2007 1 Table des matières 1 Le projet 3 1.1 Objectif................................ 3 1.2 Les choix techniques.........................
Vision industrielle et télédétection - Détection d ellipses Guillaume Martinez 17 décembre 2007 1 Table des matières 1 Le projet 3 1.1 Objectif................................ 3 1.2 Les choix techniques.........................
Objectifs. Clustering. Principe. Applications. Applications. Cartes de crédits. Remarques. Biologie, Génomique
 Objectifs Clustering On ne sait pas ce qu on veut trouver : on laisse l algorithme nous proposer un modèle. On pense qu il existe des similarités entre les exemples. Qui se ressemble s assemble p. /55
Objectifs Clustering On ne sait pas ce qu on veut trouver : on laisse l algorithme nous proposer un modèle. On pense qu il existe des similarités entre les exemples. Qui se ressemble s assemble p. /55
Baccalauréat ES Pondichéry 7 avril 2014 Corrigé
 Baccalauréat ES Pondichéry 7 avril 204 Corrigé EXERCICE 4 points Commun à tous les candidats. Proposition fausse. La tangente T, passant par les points A et B d abscisses distinctes, a pour coefficient
Baccalauréat ES Pondichéry 7 avril 204 Corrigé EXERCICE 4 points Commun à tous les candidats. Proposition fausse. La tangente T, passant par les points A et B d abscisses distinctes, a pour coefficient
TD1 PROPAGATION DANS UN MILIEU PRESENTANT UN GRADIENT D'INDICE
 TD1 PROPAGATION DANS UN MILIEU PRESENTANT UN GRADIENT D'INDICE Exercice en classe EXERCICE 1 : La fibre à gradient d indice On considère la propagation d une onde électromagnétique dans un milieu diélectrique
TD1 PROPAGATION DANS UN MILIEU PRESENTANT UN GRADIENT D'INDICE Exercice en classe EXERCICE 1 : La fibre à gradient d indice On considère la propagation d une onde électromagnétique dans un milieu diélectrique
Utilisation des Points d Intérêts Couleurs pour le Suivi d Objets
 Utilisation des Points d Intérêts Couleurs pour le Suivi d Objets Pierre Gabriel, Jean-Bernard Hayet, Justus Piater et Jacques Verly Université de Liège, Département d Électricité, Électronique et Informatique
Utilisation des Points d Intérêts Couleurs pour le Suivi d Objets Pierre Gabriel, Jean-Bernard Hayet, Justus Piater et Jacques Verly Université de Liège, Département d Électricité, Électronique et Informatique
Rupture et plasticité
 Rupture et plasticité Département de Mécanique, Ecole Polytechnique, 2009 2010 Département de Mécanique, Ecole Polytechnique, 2009 2010 25 novembre 2009 1 / 44 Rupture et plasticité : plan du cours Comportements
Rupture et plasticité Département de Mécanique, Ecole Polytechnique, 2009 2010 Département de Mécanique, Ecole Polytechnique, 2009 2010 25 novembre 2009 1 / 44 Rupture et plasticité : plan du cours Comportements
Détection des points d intérêt et Segmentation des images RGB-D. Présentée par : Bilal Tawbe. Semaine de la recherche de l UQO
 Détection des points d intérêt et Segmentation des images RGB-D Présentée par : Bilal Tawbe Semaine de la recherche de l UQO 25 Mars 2015 1. Introduction Les méthodes de détection de points d intérêt ont
Détection des points d intérêt et Segmentation des images RGB-D Présentée par : Bilal Tawbe Semaine de la recherche de l UQO 25 Mars 2015 1. Introduction Les méthodes de détection de points d intérêt ont
Baccalauréat ES/L Amérique du Sud 21 novembre 2013
 Baccalauréat ES/L Amérique du Sud 21 novembre 2013 A. P. M. E. P. EXERCICE 1 Commun à tous les candidats 5 points Une entreprise informatique produit et vend des clés USB. La vente de ces clés est réalisée
Baccalauréat ES/L Amérique du Sud 21 novembre 2013 A. P. M. E. P. EXERCICE 1 Commun à tous les candidats 5 points Une entreprise informatique produit et vend des clés USB. La vente de ces clés est réalisée
Vérification audiovisuelle de l identité
 Vérification audiovisuelle de l identité Rémi Landais, Hervé Bredin, Leila Zouari, et Gérard Chollet École Nationale Supérieure des Télécommunications, Département Traitement du Signal et des Images, Laboratoire
Vérification audiovisuelle de l identité Rémi Landais, Hervé Bredin, Leila Zouari, et Gérard Chollet École Nationale Supérieure des Télécommunications, Département Traitement du Signal et des Images, Laboratoire
Souad EL Bernoussi. Groupe d Analyse Numérique et Optimisation Rabat http ://www.fsr.ac.ma/ano/
 Recherche opérationnelle Les démonstrations et les exemples seront traités en cours Souad EL Bernoussi Groupe d Analyse Numérique et Optimisation Rabat http ://www.fsr.ac.ma/ano/ Table des matières 1 Programmation
Recherche opérationnelle Les démonstrations et les exemples seront traités en cours Souad EL Bernoussi Groupe d Analyse Numérique et Optimisation Rabat http ://www.fsr.ac.ma/ano/ Table des matières 1 Programmation
AOMS : UN NOUVEL OUTIL DE PHOTOGRAMMÉTRIE
 AOMS : UN NOUVEL OUTIL DE PHOTOGRAMMÉTRIE A. Dumont, F. Jallon et JB. Monnerie ESIC SN Z.A. du buisson de la couldre 1 Allée des Châtaigniers - F78190 TRAPPES S. Naudet, P. Sayd et M. Viala * LETI (CEA
AOMS : UN NOUVEL OUTIL DE PHOTOGRAMMÉTRIE A. Dumont, F. Jallon et JB. Monnerie ESIC SN Z.A. du buisson de la couldre 1 Allée des Châtaigniers - F78190 TRAPPES S. Naudet, P. Sayd et M. Viala * LETI (CEA
- MANIP 2 - APPLICATION À LA MESURE DE LA VITESSE DE LA LUMIÈRE
 - MANIP 2 - - COÏNCIDENCES ET MESURES DE TEMPS - APPLICATION À LA MESURE DE LA VITESSE DE LA LUMIÈRE L objectif de cette manipulation est d effectuer une mesure de la vitesse de la lumière sur une «base
- MANIP 2 - - COÏNCIDENCES ET MESURES DE TEMPS - APPLICATION À LA MESURE DE LA VITESSE DE LA LUMIÈRE L objectif de cette manipulation est d effectuer une mesure de la vitesse de la lumière sur une «base
Rétablissement d un réseau cellulaire après un désastre
 Rétablissement d un réseau cellulaire après un désastre Anaïs Vergne avec Laurent Decreusefond, Ian Flint, et Philippe Martins Journées MAS 2014 29 août 2014 Rétablissement d un réseau cellulaire après
Rétablissement d un réseau cellulaire après un désastre Anaïs Vergne avec Laurent Decreusefond, Ian Flint, et Philippe Martins Journées MAS 2014 29 août 2014 Rétablissement d un réseau cellulaire après
Formula Negator, Outil de négation de formule.
 Formula Negator, Outil de négation de formule. Aymerick Savary 1,2, Mathieu Lassale 1,2, Jean-Louis Lanet 1 et Marc Frappier 2 1 Université de Limoges 2 Université de Sherbrooke Résumé. Cet article présente
Formula Negator, Outil de négation de formule. Aymerick Savary 1,2, Mathieu Lassale 1,2, Jean-Louis Lanet 1 et Marc Frappier 2 1 Université de Limoges 2 Université de Sherbrooke Résumé. Cet article présente
Projet de Traitement du Signal Segmentation d images SAR
 Projet de Traitement du Signal Segmentation d images SAR Introduction En analyse d images, la segmentation est une étape essentielle, préliminaire à des traitements de haut niveau tels que la classification,
Projet de Traitement du Signal Segmentation d images SAR Introduction En analyse d images, la segmentation est une étape essentielle, préliminaire à des traitements de haut niveau tels que la classification,
Université des Sciences et Technologies de Lille 1 UFR Informatique. Projet scientifique de Master 2 Image, Vision, Interaction.
 Université des Sciences et Technologies de Lille 1 UFR Informatique Projet scientifique de Master 2 Image, Vision, Interaction Année 2012/1013 Reconstruction de scène réaliste via Kinect c Amélioration
Université des Sciences et Technologies de Lille 1 UFR Informatique Projet scientifique de Master 2 Image, Vision, Interaction Année 2012/1013 Reconstruction de scène réaliste via Kinect c Amélioration
www.type3.com DECOUVREZ Discover TYPE EDIT V12 Français
 www.type3.com DECOUVREZ Discover TYPE EDIT V12 Français 12-2013 1 Découvrez TYPE EDIT V12, la nouvelle version de notre logiciel de CFAO pour les applications industrielles et artistiques dédiées aux machines
www.type3.com DECOUVREZ Discover TYPE EDIT V12 Français 12-2013 1 Découvrez TYPE EDIT V12, la nouvelle version de notre logiciel de CFAO pour les applications industrielles et artistiques dédiées aux machines
Vers une approche Adaptative pour la Découverte et la Composition Dynamique des Services
 69 Vers une approche Adaptative pour la Découverte et la Composition Dynamique des Services M. Bakhouya, J. Gaber et A. Koukam Laboratoire Systèmes et Transports SeT Université de Technologie de Belfort-Montbéliard
69 Vers une approche Adaptative pour la Découverte et la Composition Dynamique des Services M. Bakhouya, J. Gaber et A. Koukam Laboratoire Systèmes et Transports SeT Université de Technologie de Belfort-Montbéliard
Depuis quelques années, les
 PHOTOGRAMMÉTRIE la photogrammétrie se trouve soudainement revalorisée, dans une période où la lasergrammétrie semblait s imposer dans la plupart des opérations de relevé architectural. Cet article s attachera
PHOTOGRAMMÉTRIE la photogrammétrie se trouve soudainement revalorisée, dans une période où la lasergrammétrie semblait s imposer dans la plupart des opérations de relevé architectural. Cet article s attachera
Correction du baccalauréat ES/L Métropole 20 juin 2014
 Correction du baccalauréat ES/L Métropole 0 juin 014 Exercice 1 1. c.. c. 3. c. 4. d. 5. a. P A (B)=1 P A (B)=1 0,3=0,7 D après la formule des probabilités totales : P(B)=P(A B)+P(A B)=0,6 0,3+(1 0,6)
Correction du baccalauréat ES/L Métropole 0 juin 014 Exercice 1 1. c.. c. 3. c. 4. d. 5. a. P A (B)=1 P A (B)=1 0,3=0,7 D après la formule des probabilités totales : P(B)=P(A B)+P(A B)=0,6 0,3+(1 0,6)
PRINCIPE MICROSCOPIE CONFOCALE
 PRINCIPE MICROSCOPIE CONFOCALE Un microscope confocal est un système pour lequel l'illumination et la détection sont limités à un même volume de taille réduite (1). L'image confocale (ou coupe optique)
PRINCIPE MICROSCOPIE CONFOCALE Un microscope confocal est un système pour lequel l'illumination et la détection sont limités à un même volume de taille réduite (1). L'image confocale (ou coupe optique)
Classification non supervisée
 AgroParisTech Classification non supervisée E. Lebarbier, T. Mary-Huard Table des matières 1 Introduction 4 2 Méthodes de partitionnement 5 2.1 Mesures de similarité et de dissimilarité, distances.................
AgroParisTech Classification non supervisée E. Lebarbier, T. Mary-Huard Table des matières 1 Introduction 4 2 Méthodes de partitionnement 5 2.1 Mesures de similarité et de dissimilarité, distances.................
MASTER SIS PRO : logique et sécurité DÉTECTION D INTRUSIONS. Odile PAPINI, LSIS. Université de Toulon et du Var. papini@univ-tln.
 MASTER SIS PRO : logique et sécurité DÉTECTION D INTRUSIONS Odile PAPINI, LSIS. Université de Toulon et du Var. [email protected] Plan Introduction Généralités sur les systèmes de détection d intrusion
MASTER SIS PRO : logique et sécurité DÉTECTION D INTRUSIONS Odile PAPINI, LSIS. Université de Toulon et du Var. [email protected] Plan Introduction Généralités sur les systèmes de détection d intrusion
Cours d Analyse. Fonctions de plusieurs variables
 Cours d Analyse Fonctions de plusieurs variables Licence 1ère année 2007/2008 Nicolas Prioux Université de Marne-la-Vallée Table des matières 1 Notions de géométrie dans l espace et fonctions à deux variables........
Cours d Analyse Fonctions de plusieurs variables Licence 1ère année 2007/2008 Nicolas Prioux Université de Marne-la-Vallée Table des matières 1 Notions de géométrie dans l espace et fonctions à deux variables........
Monitoring elderly People by Means of Cameras
 Nuadu project Technologies for Personal Hearth Seminar, June 4th, 2009 Monitoring elderly People by Means of Cameras Laurent LUCAT Laboratory of Embedded Vision Systems CEA LIST, Saclay, France 1 Summary
Nuadu project Technologies for Personal Hearth Seminar, June 4th, 2009 Monitoring elderly People by Means of Cameras Laurent LUCAT Laboratory of Embedded Vision Systems CEA LIST, Saclay, France 1 Summary
Sujet proposé par Yves M. LEROY. Cet examen se compose d un exercice et de deux problèmes. Ces trois parties sont indépendantes.
 Promotion X 004 COURS D ANALYSE DES STRUCTURES MÉCANIQUES PAR LA MÉTHODE DES ELEMENTS FINIS (MEC 568) contrôle non classant (7 mars 007, heures) Documents autorisés : polycopié ; documents et notes de
Promotion X 004 COURS D ANALYSE DES STRUCTURES MÉCANIQUES PAR LA MÉTHODE DES ELEMENTS FINIS (MEC 568) contrôle non classant (7 mars 007, heures) Documents autorisés : polycopié ; documents et notes de
Programmation linéaire
 1 Programmation linéaire 1. Le problème, un exemple. 2. Le cas b = 0 3. Théorème de dualité 4. L algorithme du simplexe 5. Problèmes équivalents 6. Complexité de l Algorithme 2 Position du problème Soit
1 Programmation linéaire 1. Le problème, un exemple. 2. Le cas b = 0 3. Théorème de dualité 4. L algorithme du simplexe 5. Problèmes équivalents 6. Complexité de l Algorithme 2 Position du problème Soit
RIE LE RENDU THEO. 2 e trim ÉTAPE DE FINITION BOÎTE DE DIALOGUE. remarques
 THEO RIE LE RENDU 2 e trim JANVIER 2008 remarques ÉTAPE DE FINITION Le rendu est la partie finale de notre création, à ce moment on décide que notre 3D est finie et l on en réalise une image 2D Cette image
THEO RIE LE RENDU 2 e trim JANVIER 2008 remarques ÉTAPE DE FINITION Le rendu est la partie finale de notre création, à ce moment on décide que notre 3D est finie et l on en réalise une image 2D Cette image
MCMC et approximations en champ moyen pour les modèles de Markov
 MCMC et approximations en champ moyen pour les modèles de Markov Gersende FORT LTCI CNRS - TELECOM ParisTech En collaboration avec Florence FORBES (Projet MISTIS, INRIA Rhône-Alpes). Basé sur l article:
MCMC et approximations en champ moyen pour les modèles de Markov Gersende FORT LTCI CNRS - TELECOM ParisTech En collaboration avec Florence FORBES (Projet MISTIS, INRIA Rhône-Alpes). Basé sur l article:
Plus courts chemins, programmation dynamique
 1 Plus courts chemins, programmation dynamique 1. Plus courts chemins à partir d un sommet 2. Plus courts chemins entre tous les sommets 3. Semi-anneau 4. Programmation dynamique 5. Applications à la bio-informatique
1 Plus courts chemins, programmation dynamique 1. Plus courts chemins à partir d un sommet 2. Plus courts chemins entre tous les sommets 3. Semi-anneau 4. Programmation dynamique 5. Applications à la bio-informatique
Fête de la science Initiation au traitement des images
 Fête de la science Initiation au traitement des images Détection automatique de plaques minéralogiques à partir d'un téléphone portable et atelier propose de créer un programme informatique pour un téléphone
Fête de la science Initiation au traitement des images Détection automatique de plaques minéralogiques à partir d'un téléphone portable et atelier propose de créer un programme informatique pour un téléphone
Dense Reconstruction Method s for Active Vision
 Méthodes de Reconstruction Denses pour la Vision Active Dense Reconstruction Method s for Active Vision par Emmanuelle CLERGUE et Thierry VIÉVILL E INRIA, Unité de Recherche de Sophia-Antipolis 2004, route
Méthodes de Reconstruction Denses pour la Vision Active Dense Reconstruction Method s for Active Vision par Emmanuelle CLERGUE et Thierry VIÉVILL E INRIA, Unité de Recherche de Sophia-Antipolis 2004, route
Image d un intervalle par une fonction continue
 DOCUMENT 27 Image d un intervalle par une fonction continue La continuité d une fonction en un point est une propriété locale : une fonction est continue en un point x 0 si et seulement si sa restriction
DOCUMENT 27 Image d un intervalle par une fonction continue La continuité d une fonction en un point est une propriété locale : une fonction est continue en un point x 0 si et seulement si sa restriction
CAPTEURS - CHAINES DE MESURES
 CAPTEURS - CHAINES DE MESURES Pierre BONNET Pierre Bonnet Master GSI - Capteurs Chaînes de Mesures 1 Plan du Cours Propriétés générales des capteurs Notion de mesure Notion de capteur: principes, classes,
CAPTEURS - CHAINES DE MESURES Pierre BONNET Pierre Bonnet Master GSI - Capteurs Chaînes de Mesures 1 Plan du Cours Propriétés générales des capteurs Notion de mesure Notion de capteur: principes, classes,
LA NOTATION STATISTIQUE DES EMPRUNTEURS OU «SCORING»
 LA NOTATION STATISTIQUE DES EMPRUNTEURS OU «SCORING» Gilbert Saporta Professeur de Statistique Appliquée Conservatoire National des Arts et Métiers Dans leur quasi totalité, les banques et organismes financiers
LA NOTATION STATISTIQUE DES EMPRUNTEURS OU «SCORING» Gilbert Saporta Professeur de Statistique Appliquée Conservatoire National des Arts et Métiers Dans leur quasi totalité, les banques et organismes financiers
Développements algorithmiques au LIAMA et àamap en vue de l'analyse d'une scène forestière
 Développements algorithmiques au LIAMA et àamap en vue de l'analyse d'une scène forestière Principaux contributeurs: Zhang Xiaopeng (CASIA-NLPR-LIAMA Coordinateur Groupe Image) Li HongJun (CASIA-NLPR-LIAMA
Développements algorithmiques au LIAMA et àamap en vue de l'analyse d'une scène forestière Principaux contributeurs: Zhang Xiaopeng (CASIA-NLPR-LIAMA Coordinateur Groupe Image) Li HongJun (CASIA-NLPR-LIAMA
F7n COUP DE BOURSE, NOMBRE DÉRIVÉ
 Auteur : S.& S. Etienne F7n COUP DE BOURSE, NOMBRE DÉRIVÉ TI-Nspire CAS Mots-clés : représentation graphique, fonction dérivée, nombre dérivé, pente, tableau de valeurs, maximum, minimum. Fichiers associés
Auteur : S.& S. Etienne F7n COUP DE BOURSE, NOMBRE DÉRIVÉ TI-Nspire CAS Mots-clés : représentation graphique, fonction dérivée, nombre dérivé, pente, tableau de valeurs, maximum, minimum. Fichiers associés
Correction du bac blanc CFE Mercatique
 Correction du bac blanc CFE Mercatique Exercice 1 (4,5 points) Le tableau suivant donne l évolution du nombre de bénéficiaires de minima sociaux en milliers : Année 2002 2003 2004 2005 2006 2007 2008 2009
Correction du bac blanc CFE Mercatique Exercice 1 (4,5 points) Le tableau suivant donne l évolution du nombre de bénéficiaires de minima sociaux en milliers : Année 2002 2003 2004 2005 2006 2007 2008 2009
Résolution d équations non linéaires
 Analyse Numérique Résolution d équations non linéaires Said EL HAJJI et Touria GHEMIRES Université Mohammed V - Agdal. Faculté des Sciences Département de Mathématiques. Laboratoire de Mathématiques, Informatique
Analyse Numérique Résolution d équations non linéaires Said EL HAJJI et Touria GHEMIRES Université Mohammed V - Agdal. Faculté des Sciences Département de Mathématiques. Laboratoire de Mathématiques, Informatique
Optimisation de la compression fractale D images basée sur les réseaux de neurones
 Optimisation de la compression fractale D images basée sur les réseaux de neurones D r BOUKELIF Aoued Communication Networks,Architectures and Mutimedia laboratory University of S.B.A [email protected]
Optimisation de la compression fractale D images basée sur les réseaux de neurones D r BOUKELIF Aoued Communication Networks,Architectures and Mutimedia laboratory University of S.B.A [email protected]
Nombres, mesures et incertitudes en sciences physiques et chimiques. Groupe des Sciences physiques et chimiques de l IGEN
 Nombres, mesures et incertitudes en sciences physiques et chimiques. Groupe des Sciences physiques et chimiques de l IGEN Table des matières. Introduction....3 Mesures et incertitudes en sciences physiques
Nombres, mesures et incertitudes en sciences physiques et chimiques. Groupe des Sciences physiques et chimiques de l IGEN Table des matières. Introduction....3 Mesures et incertitudes en sciences physiques
Recherche d'images par le contenu Application au monitoring Télévisuel à l'institut national de l'audiovisuel
 Recherche d'images par le contenu Application au monitoring Télévisuel à l'institut national de l'audiovisuel Alexis Joly [email protected] INRIA - IMEDIA Alexis Joly cours monitoring p. 1 Plan de l'exposé
Recherche d'images par le contenu Application au monitoring Télévisuel à l'institut national de l'audiovisuel Alexis Joly [email protected] INRIA - IMEDIA Alexis Joly cours monitoring p. 1 Plan de l'exposé
Présentation du sujet de thèse Schémas temporels hybrides fondés sur les SVMs pour l analyse du comportement du conducteur
 Présentation du sujet de thèse Schémas temporels hybrides fondés sur les SVMs pour l analyse du comportement du conducteur Réalisé par : Bassem Besbes Laboratoire d Informatique, Traitement de l Information
Présentation du sujet de thèse Schémas temporels hybrides fondés sur les SVMs pour l analyse du comportement du conducteur Réalisé par : Bassem Besbes Laboratoire d Informatique, Traitement de l Information
Simulation d'un examen anthropomorphique en imagerie TEMP à l iode 131 par simulation Monte Carlo GATE
 Simulation d'un examen anthropomorphique en imagerie TEMP à l iode 131 par simulation Monte Carlo GATE LAURENT Rémy [email protected] http://clrpcsv.in2p3.fr Journées des LARD Septembre 2007 M2R
Simulation d'un examen anthropomorphique en imagerie TEMP à l iode 131 par simulation Monte Carlo GATE LAURENT Rémy [email protected] http://clrpcsv.in2p3.fr Journées des LARD Septembre 2007 M2R
Elasticité logicielle pour optimiser l empreinte énergétique
 Ecole des Mines de Nantes Elasticité logicielle pour optimiser l empreinte énergétique Thomas Ledoux (équipe Ascola, INRIA-EMN, LINA) direction des études décembre 2010 page 1 Relation logiciel empreinte
Ecole des Mines de Nantes Elasticité logicielle pour optimiser l empreinte énergétique Thomas Ledoux (équipe Ascola, INRIA-EMN, LINA) direction des études décembre 2010 page 1 Relation logiciel empreinte
FONCTION DE DEMANDE : REVENU ET PRIX
 FONCTION DE DEMANDE : REVENU ET PRIX 1. L effet d une variation du revenu. Les lois d Engel a. Conditions du raisonnement : prix et goûts inchangés, variation du revenu (statique comparative) b. Partie
FONCTION DE DEMANDE : REVENU ET PRIX 1. L effet d une variation du revenu. Les lois d Engel a. Conditions du raisonnement : prix et goûts inchangés, variation du revenu (statique comparative) b. Partie
Exercices Alternatifs. Quelqu un aurait-il vu passer un polynôme?
 Exercices Alternatifs Quelqu un aurait-il vu passer un polynôme? c 2004 Frédéric Le Roux, François Béguin (copyleft LDL : Licence pour Documents Libres). Sources et figures: polynome-lagrange/. Version
Exercices Alternatifs Quelqu un aurait-il vu passer un polynôme? c 2004 Frédéric Le Roux, François Béguin (copyleft LDL : Licence pour Documents Libres). Sources et figures: polynome-lagrange/. Version
Exercices Alternatifs. Quelqu un aurait-il vu passer un polynôme?
 Exercices Alternatifs Quelqu un aurait-il vu passer un polynôme? c 2004 Frédéric Le Roux, François Béguin (copyleft LDL : Licence pour Documents Libres). Sources et figures: polynome-lagrange/. Version
Exercices Alternatifs Quelqu un aurait-il vu passer un polynôme? c 2004 Frédéric Le Roux, François Béguin (copyleft LDL : Licence pour Documents Libres). Sources et figures: polynome-lagrange/. Version
LCD COLOR MONITOR (English French Translation)
") LCD COLOR MONITOR (English French Translation) Front page : -1 Manuel d Utilisation -2 Système Vidéo Couleur LCD Table of contents : Table des Matières 1. Précautions 2. Accessoires 3. Fonctions 4. Télécommande
LCD COLOR MONITOR (English French Translation) Front page : -1 Manuel d Utilisation -2 Système Vidéo Couleur LCD Table of contents : Table des Matières 1. Précautions 2. Accessoires 3. Fonctions 4. Télécommande
Détection et suivi d'objets dans une séquence d'images par contours actifs
 Détection et suivi d'objets dans une séquence d'images par contours actifs A. Fekir (1), N. Benamrane (2) et A. Taleb-Ahmed (3) (1) Département d informatique, Université de Mustapha Stambouli, BP 763,
Détection et suivi d'objets dans une séquence d'images par contours actifs A. Fekir (1), N. Benamrane (2) et A. Taleb-Ahmed (3) (1) Département d informatique, Université de Mustapha Stambouli, BP 763,
INF6304 Interfaces Intelligentes
 INF6304 Interfaces Intelligentes filtres collaboratifs 1/42 INF6304 Interfaces Intelligentes Systèmes de recommandations, Approches filtres collaboratifs Michel C. Desmarais Génie informatique et génie
INF6304 Interfaces Intelligentes filtres collaboratifs 1/42 INF6304 Interfaces Intelligentes Systèmes de recommandations, Approches filtres collaboratifs Michel C. Desmarais Génie informatique et génie
Contexte. Pour cela, elles doivent être très compliquées, c est-à-dire elles doivent être très différentes des fonctions simples,
 Non-linéarité Contexte Pour permettre aux algorithmes de cryptographie d être sûrs, les fonctions booléennes qu ils utilisent ne doivent pas être inversées facilement. Pour cela, elles doivent être très
Non-linéarité Contexte Pour permettre aux algorithmes de cryptographie d être sûrs, les fonctions booléennes qu ils utilisent ne doivent pas être inversées facilement. Pour cela, elles doivent être très
ITIL V3. Transition des services : Principes et politiques
 ITIL V3 Transition des services : Principes et politiques Création : janvier 2008 Mise à jour : août 2009 A propos A propos du document Ce document de référence sur le référentiel ITIL V3 a été réalisé
ITIL V3 Transition des services : Principes et politiques Création : janvier 2008 Mise à jour : août 2009 A propos A propos du document Ce document de référence sur le référentiel ITIL V3 a été réalisé
Introduction au Data-Mining
 Introduction au Data-Mining Alain Rakotomamonjy - Gilles Gasso. INSA Rouen -Département ASI Laboratoire PSI Introduction au Data-Mining p. 1/25 Data-Mining : Kèkecé? Traduction : Fouille de données. Terme
Introduction au Data-Mining Alain Rakotomamonjy - Gilles Gasso. INSA Rouen -Département ASI Laboratoire PSI Introduction au Data-Mining p. 1/25 Data-Mining : Kèkecé? Traduction : Fouille de données. Terme
LA PHYSIQUE DES MATERIAUX. Chapitre 1 LES RESEAUX DIRECT ET RECIPROQUE
 LA PHYSIQUE DES MATERIAUX Chapitre 1 LES RESEAUX DIRECT ET RECIPROQUE Pr. A. Belayachi Université Mohammed V Agdal Faculté des Sciences Rabat Département de Physique - L.P.M [email protected] 1 1.Le réseau
LA PHYSIQUE DES MATERIAUX Chapitre 1 LES RESEAUX DIRECT ET RECIPROQUE Pr. A. Belayachi Université Mohammed V Agdal Faculté des Sciences Rabat Département de Physique - L.P.M [email protected] 1 1.Le réseau
Recherche De Coalescences Binaires Étalonnage Du Détecteur
 Recherche De Coalescences Binaires Étalonnage Du Détecteur Fabrice Beauville Journées Jeunes Chercheurs 18/12/2003 Les Coalescences Binaires & VIRGO Système binaire d objets compacts (étoiles à neutrons,
Recherche De Coalescences Binaires Étalonnage Du Détecteur Fabrice Beauville Journées Jeunes Chercheurs 18/12/2003 Les Coalescences Binaires & VIRGO Système binaire d objets compacts (étoiles à neutrons,
Chapitre 5 : Flot maximal dans un graphe
 Graphes et RO TELECOM Nancy A Chapitre 5 : Flot maximal dans un graphe J.-F. Scheid 1 Plan du chapitre I. Définitions 1 Graphe Graphe valué 3 Représentation d un graphe (matrice d incidence, matrice d
Graphes et RO TELECOM Nancy A Chapitre 5 : Flot maximal dans un graphe J.-F. Scheid 1 Plan du chapitre I. Définitions 1 Graphe Graphe valué 3 Représentation d un graphe (matrice d incidence, matrice d
Intégration de la dimension sémantique dans les réseaux sociaux
 Intégration de la dimension sémantique dans les réseaux sociaux Application : systèmes de recommandation Maria Malek LARIS-EISTI [email protected] 1 Contexte : Recommandation dans les réseaux sociaux
Intégration de la dimension sémantique dans les réseaux sociaux Application : systèmes de recommandation Maria Malek LARIS-EISTI [email protected] 1 Contexte : Recommandation dans les réseaux sociaux
Chapitre 18 : Transmettre et stocker de l information
 Chapitre 18 : Transmettre et stocker de l information Connaissances et compétences : - Identifier les éléments d une chaîne de transmission d informations. - Recueillir et exploiter des informations concernant
Chapitre 18 : Transmettre et stocker de l information Connaissances et compétences : - Identifier les éléments d une chaîne de transmission d informations. - Recueillir et exploiter des informations concernant
Précision d un résultat et calculs d incertitudes
 Précision d un résultat et calculs d incertitudes PSI* 2012-2013 Lycée Chaptal 3 Table des matières Table des matières 1. Présentation d un résultat numérique................................ 4 1.1 Notations.........................................................
Précision d un résultat et calculs d incertitudes PSI* 2012-2013 Lycée Chaptal 3 Table des matières Table des matières 1. Présentation d un résultat numérique................................ 4 1.1 Notations.........................................................
Groupe Eyrolles, 2006, ISBN : 2-212-11959-3
 Groupe Eyrolles, 2006, ISBN : 2-212-11959-3 annexe B Piano Corner, (c) 2005 par Zsolt Stefan : http://deeppixel.uw.hu/gallery.html YafRay, le moteur de rendu photoréaliste Dès sa création, par une équipe
Groupe Eyrolles, 2006, ISBN : 2-212-11959-3 annexe B Piano Corner, (c) 2005 par Zsolt Stefan : http://deeppixel.uw.hu/gallery.html YafRay, le moteur de rendu photoréaliste Dès sa création, par une équipe