Sciences industrielles Cours
|
|
|
- Nadine St-Amour
- il y a 8 ans
- Total affichages :
Transcription
1 Lycée Blaise Pascal Mathématiques supérieures et spéciales Sciences industrielles Cours Mathématiques supérieures

2

3 GENERALITE 7 QUELQUES INFORMATIONS SUR LES SYSTEMES 9 I Introduction 9 II Définition 9 Définition d un système 9 Frontière d un système 9 3 Entrées sorties d un système ; matière d œuvre 9 4 Fonction globale d un système ; valeur ajoutée III Méthodes et principes de structuration d un système Analyse fonctionnelle descendante a Méthode FAST b Méthode SADT Analyse structurelle a Structure générale d un système b Structure d une chaîne fonctionnelle 3 3 Analyse temporelle 4 IV Contenus de l enseignement de sciences industrielles 4 INTRODUCTION A L AUTOMATIQUE 5 I Définition de l automatique 5 II But de l automatique 5 III Historique 5 IV Différents types de systèmes automatiques 5 LOGIQUE COMBINATOIRE 7 I Exemple d un problème à résoudre : distributeur de sable 7 II Algèbre de Boole 8 Fonction binaire (ou booléenne) d une variable binaire (ou booléenne) 8 Fonctions binaires (ou booléennes) de variables binaires (ou booléennes) 8 3 Propriétés des fonctions ET, OU 8 4 Formes canoniques 8 5 Exemples 9 6 Simplification des expression logiques 9 a Utilisation des propriétés mathématiques de l algèbre de Boole 9 b utilisation des tableaux de Karnaugh 9 III Réalisation technologique des fonctions logiques Réalisation de fonctions logiques par technologie pneumatique Réalisation de fonctions logiques par technologie électrique câblée 3 Réalisation de fonctions logiques par technologie électrique programmée IV Complément RAPPELS DE MATHEMATIQUES A L USAGE DE LA MECANIQUE I Espace II Opération sur les vecteurs produit scalaire de deux vecteurs Produit vectoriel de deux vecteurs 3 3 Produit mixte de trois vecteurs 3 III Champs de vecteurs 3 Définition 3 Champ de vecteurs équiprojectif et champ de vecteurs antisymétriques 4 3 Torseurs 4 4 Propriétés des torseurs 4 5 Axe central d un torseur 5 IV Dérivation vectorielle 6 LOGIQUE SEQUENTIELLE 8 I Définition 8 II Mémoires 8 mémorisation d un événement 8 Remise à zéro 8 3 Représentation 8 4 Priorités 8 5 Réalisation de mémoires 9 a Table de vérité de la mémoire 9 b Tableau de Karnaugh de la mémoire 9 c Equation logique de la mémoire 9 d Logigramme (pneumatique) 9

4 e Mémoire câblée 9 III Grafcet Définition et notions fondamentales 3 Structure générale 3 Exemple 3 3 Notion d étape 3 4 Notion de transition 3 5 Règles d évolution du Grafcet 3 6 Parallélisme et sélection 3 IV Extensions à propos du Grafcet 34 Franchissement de transitions validées 34 Actions conditionnelles, continues, impulsionnelles 34 3 Macro-étapes 35 4 Tâche 35 INITIATION A LA LECTURE DE DESSIN INDUSTRIEL 36 I Introduction 36 II Dessin géométral Différentes vues 36 III Axes 36 IV Coupes 37 V Représentation des filetages et des taraudages 37 Filetage 37 Taraudage 38 3 Assemblage 38 QUELQUES INFORMATIONS SUR LE DESSIN ASSISTE PAR ORDINATEUR (PAO) 4 I Introduction 4 II Logiciel DAO D appliqué à la construction mécanique 4 III Logiciel DAO 3D appliqué à la construction mécanique 4 Généralités 4 Obtention d objets en DAO 3D 4 3 Différents types de logiciels 3D 4 a Modeleur filaire 4 b Modeleur surfacique 4 c Modeleur volumique 4 IV Logiciel DAO au lycée B Pascal 4 CINEMATIQUE 43 CINEMATIQUE DU SOLIDE INDEFORMABLE 45 I Cinématique du point 45 Mouvement d un point P par rapport à un repère R 45 Vitesse d un point P par rapport à un repère R 45 3 Accélération d un point P par rapport à un repère R 45 II Cinématique du solide indéformable 45 Solide indéformable 45 Champ des vitesses dans un solide indéformable 45 3 Composition de mouvement 46 III Mouvements particuliers de solides 48 Translation 48 Rotation autour d un axe 48 3 Mouvement hélicoïdal d axe 48 4 Mouvement hélicoïdal tangent 49 IV Mouvement plan sur plan 49 Définition 49 Centre instantané de rotation (CIR) 49 3 Base et roulante 5 4 Théorème des trois plans glissants 5 MODELISATIONS CINEMATIQUES ET GEOMETRIQUE DES LIAISONS 53 I Liaisons entre solides53 Degrés de liberté d un solide par rapport à un autre 53 Paramétrage géométrique de la position d un solide par rapport à un autre ou par rapport à un repère 53 3 Liaisons normalisées entre solides 55 4 Géométrie et cinématique du contact entre deux solides 55 a Vitesse de glissement 55 b Roulement, pivotement 56 II Chaîne de solides 56 Définition 56
 4 I Introduction 4 II Logiciel DAO D appliqué à la construction mécanique 4 III Logiciel DAO 3D appliqué à la construction mécanique 4")
5 Liaisons équivalentes et graphe minimal des liaisons 56 3 Schéma cinématique 57 4 Equation de fermeture de chaîne 57 Tableau des liaisons normalisées 6 Engrenages et roulements 6 STATIQUE 63 INTEGRALES DOUBLES ET INTEGRALES TRIPLES EN SI ET EN PHYSIQUE 65 I Rappel : Intégrale simple 65 II Intégrale double 65 III Intégrale triple 65 STATIQUE DES SOLIDES 66 I Modélisation des actions mécaniques 66 Notion d action mécanique 66 Modélisation locale des actions mécaniques 66 3 Puissance des actions mécaniques (par rapport à un repère R) 66 4 Modélisation globale des actions mécaniques exercées sur un solide S indéformable (ou ensemble de solides indéformables) 67 5 Exemples d actions mécaniques 68 a Champ de pesanteur 68 b Cas d une force surfacique localisée 69 c Solide soumis à des actions mécaniques assimilables à deux glisseurs 7 II Modélisation des actions mécaniques transmissibles par les liaisons parfaites 7 Rappel 7 Définition d une liaison parfaite 7 3 Torseur statique d une liaison parfaite 7 III Principe fondamental de la statique appliqué à un système matériel 73 Notion d équilibre 73 Principe fondamental de la statique appliqué au point matériel 73 3 Principe des actions mutuelles 73 4 Conséquence : Principe fondamental de la statique appliqué à un système de deux points matériels 73 5 Principe fondamental de la statique appliqué à un système matériel 73 6 Enoncé du principe fondamental de la statique 74 7 Détermination des actions mécaniques 74 8 Théorème des actions mutuelles 74 9 Cas particuliers 75 a Solide en équilibre sous l action de deux forces ponctuelles 75 b Solide soumis à trois efforts ponctuels 76 c Exemple 77 IV Modélisation des actions mécaniques transmissibles par une liaison non parfaite 77 Mise en évidence du caractère non parfait de la liaison 77 Modélisation des actions méacniques transmissibles par une liaison ponctuelle (modèle de Coulomb) 78 3 Quelques valeurs de coefficients 8 4 Liaisons surfaciques non parfaites 8 ASSERVISSEMENT 8 ASSERVISSEMENT 83 I Généralités 83 structure d un système asservi 83 Intérêt d un système asservi 83 3 Qualité d un système asservi 83 4 Cas des servomécanismes Exemple 84 II Systèmes asservis linéaires 84 Définition 84 Représentation d un système asservi linéaire invariant 87 3 Méthode de résolution 87 III Transformée de Laplace, application aux systèmes asservis linéaires 87 Définition 87 Fonctions usuelles et leur transformée de Laplace 87 a Fonction échelon (Heaviside) 87 b Fonction impulsion 88 c Autres fonctions usuelles 88 3 Propriétés des transformées de Laplace 88 4 Application à la résolution des systèmes asservis : Fonction de transfert 88 5 Application au servomécanisme de I-4 89
 67 5 Exemples d actions mécaniques 68 a Champ de pesanteur 68 b Cas d une force surfacique localisée 69 c")
6 a Réponse à un échelon 9 b Réponse à une rampe 9 c Réponse à une mise hors équilibre 9 d Réponse à une entrée harmonique 93 e Réponse à une entrée harmonique avec condition initiale non nulle 9 IV Schéma bloc 95 V Réponse harmonique des systèmes linéaires Lieux de transfert 98 Réponse harmonique 98 lieux de transfert 99 a Diagramme de Bode 99 b Diagramme de Nyquist 99 c Diagramme de Black 99 d Intérêt du tracé des lieux de transfert 99 VI Identification et modélisation REPONSE INDICIELLE DES SYSTEMES LINEAIRES I Réponse indicielle d un système linéaire du premier ordre En boucle ouverte En boucle fermée II Réponse indicielle d un système linéaire intégrateur En boucle ouverte En boucle fermée III Réponse indicielle d un système linéaire du deuxième ordre En boucle ouverte En boucle fermée 5 DIAGRAMME DE BODE 6

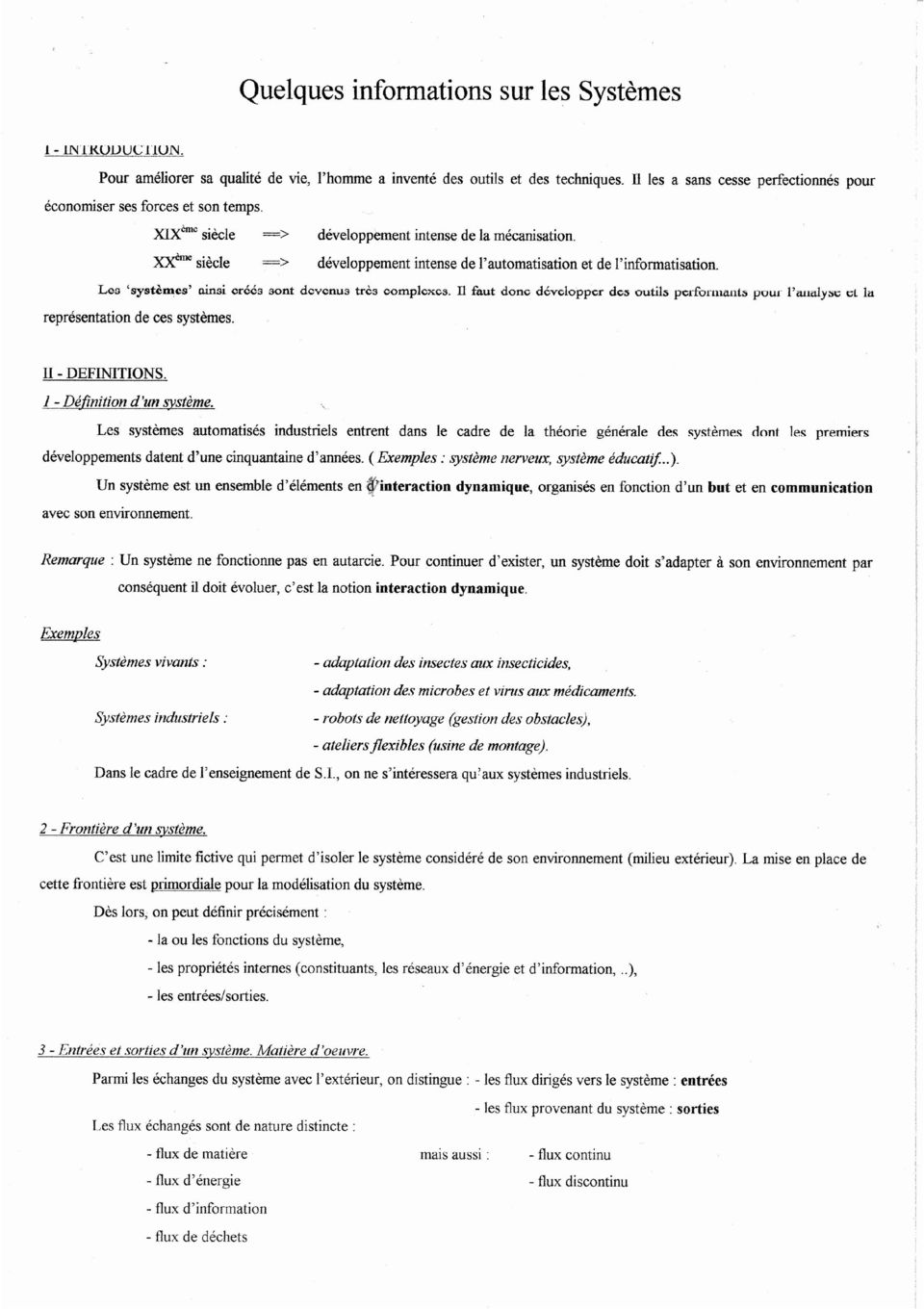
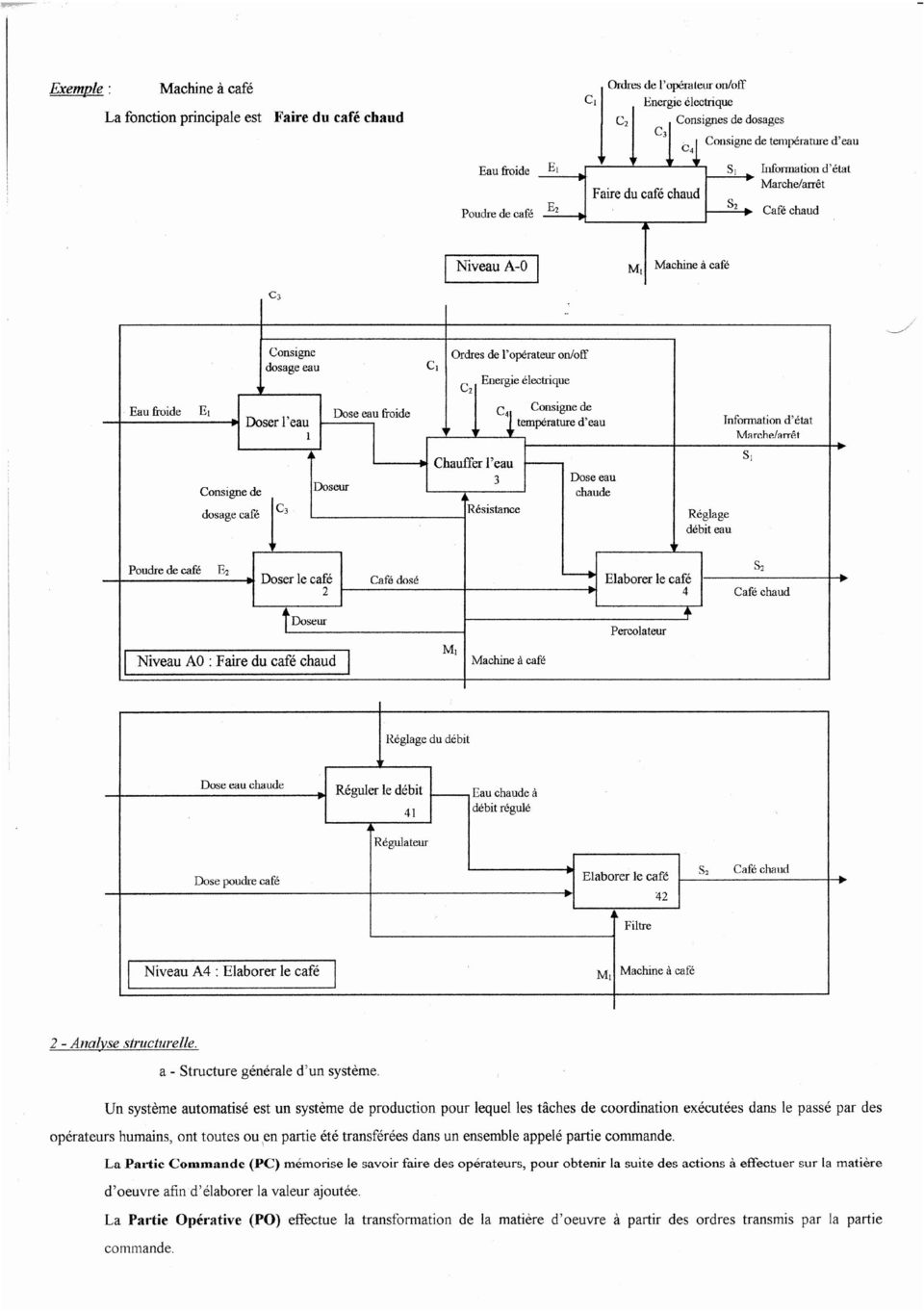
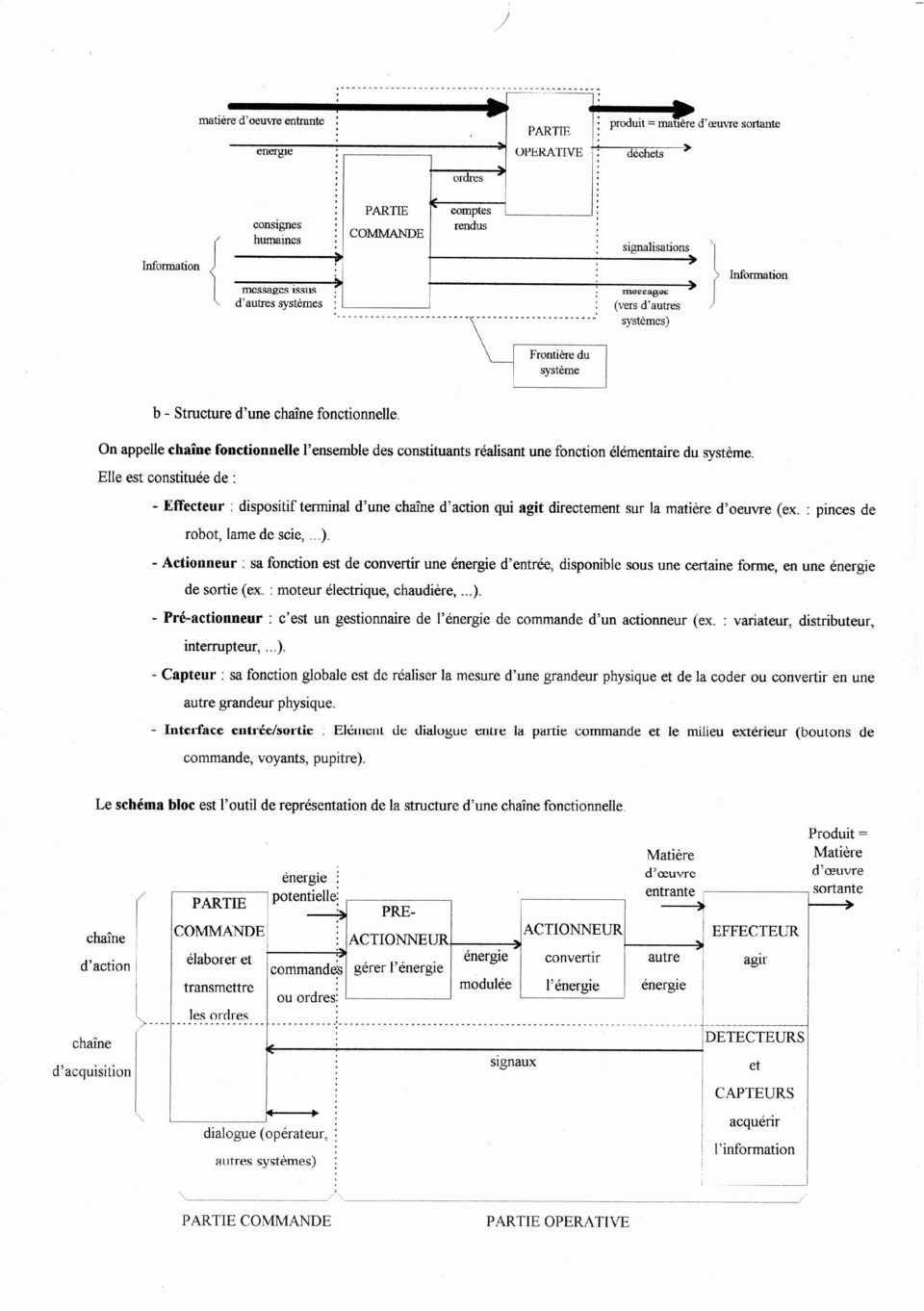
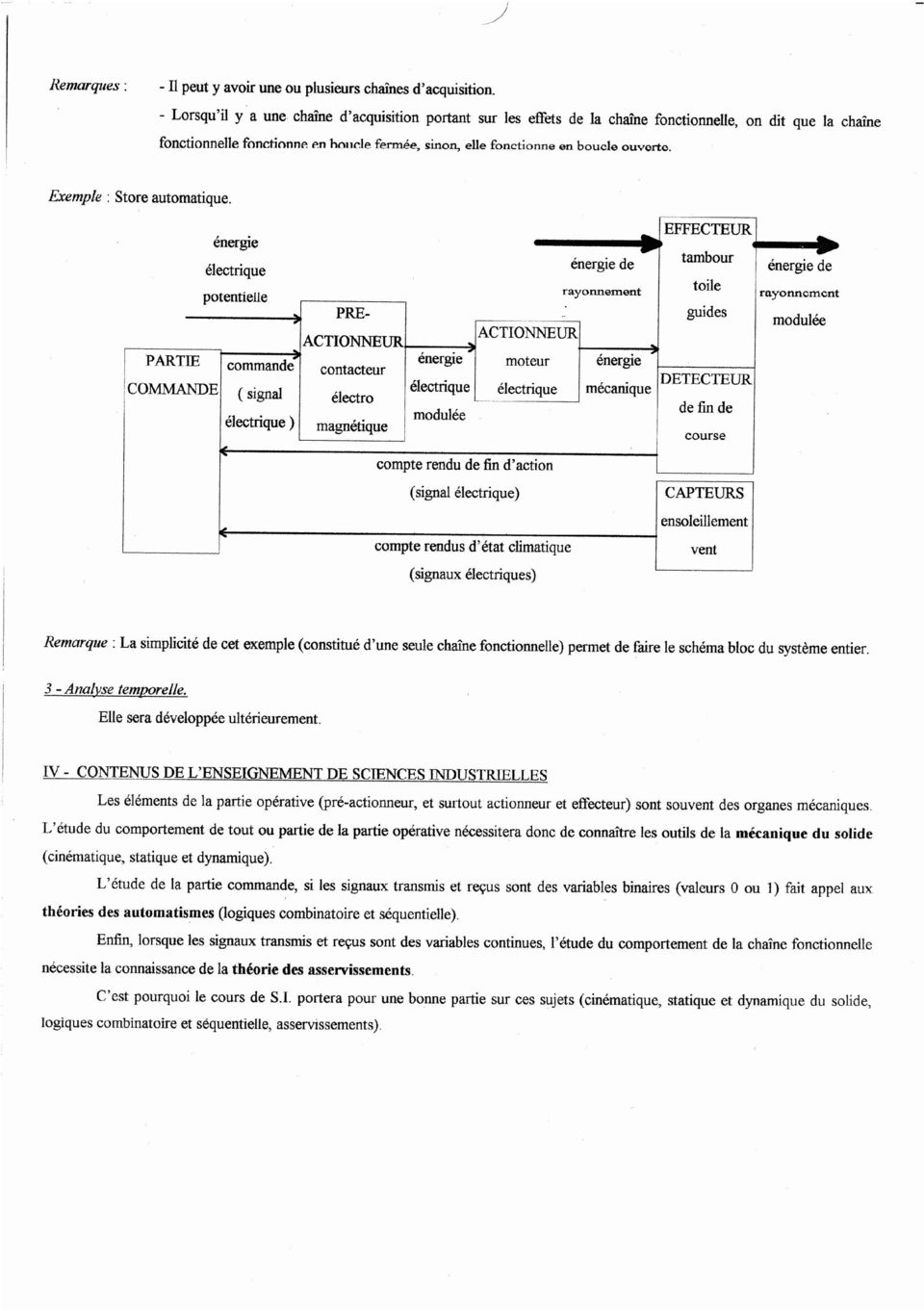
7 GENERALITE

8

9
10

11

12
13
14
15
16

17
18

19

20

21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43 CINEMATIQUE
44
45
46 OB = OA + AB Par dérivation relativement au référentiel R par rapport au temps v + B S / R = v A S / R d AB dt R d AB dt R d AB dt = + Ω R / R R AB Si le solide est indéformable, d AB dt R = Soit Ω = Ω R / R S / R Ω S / R est le vecteur vitesse de rotation du solide S par rapport au référentiel R v / R = v A S / R + Ω B S S / R AB Le champ des vitesses d un solide est équiprojectif et antisymétrique On peut le représenter par un torseur, appelé torseur cinématique, de résultante Ω S / R et de moment en A v A S / R On le note { V } = { Ω S / R, v A S / R } A 3 Composition de mouvement But : Connaissant le mouvement du solide S dans le référentiel R et celui du référentiel R par rapport au référentiel R, trouver le mouvement du solide S dans le référentiel R Composition de vitesse : S M R R S O R O u Soit u un vecteur quelconque lié au solide S
47 du dt R du dt = + Ω R / R R u de plus du dt R du dt = + Ω RS RS du du / R u et = + Ω S / R u dt dt R RS Ω S / R Donc u = Ω u + Ω Ω S / R S / R R / R Cette relation est vraie pour tout vecteur u lié au solide S, donc Ω = Ω + Ω S / R S / R R / R u Sur la vitesse, v M S / R doom = dt dooo = dt = v = v O R / R O R / R R R + dom dt M S / R R dom + + Ω dt R + v + Ω R / R R / R OM OM D où v M S / R = vm R R v / + M S / R Vitesse absolue = vitesse entraînement + vitesse relative Composition des accélérations : On montre de même que a M S / R = am S R am R R R R v / + / + Ω / M S / R Accélération absolue = Accélération relative + Accélération entraînement + Accélération coriolis Pour déterminer la formule du changement de point en accélération, on doit utiliser la dérivée de la formule de changement de point en vitesse vm R / R = vo + Ω R / R R / R OM
48 d v dt d dω R / R M R / R = v O R / R + OM + Ω R / R R dt R dt a = ao dω R + dt OM + Ω / R M R / R R R R R / / / dom dt ( Ω R R OM ) Le champ des accélération n est pas un champ de moment de torseur, et n est donc ni antisymétrique, ni equiprojectif En pratique (en SI), on utilisera peu la composition des accélérations, et de toute façon jamais la formule du changement de point pour les accélérations R III Mouvements particuliers de solide a Translation Un solide S est en translation par rapport au référentiel R si, B) S, v A v Soit Le torseur cinématique est alors de la forme Ce torseur est un couple ( A S / R = B S / R Ω S / R = { V S / R } = {, v A S / R } A b Rotation autour d un axe Un solide S est en rotation autour d un axe ( fixe dans R) si P = Le torseur cinématique est de la forme Ce torseur est un glisseur d axe central, v P S / R { V S / R } = { Ω S / R, } P c Mouvement hélicoïdal d axe Le torseur d un mouvement hélicoïdal d axe centrale est de la forme P V = Ω u, v u { S / R } { S / R P S R } P, / où u est un vecteur unitaire de v P S / R = k Ω S / R (k indépendant du temps)
49 C est un torseur d axe central Ce n est ni un couple ni un glisseur, mais la somme d un glisseur d axe central et d un couple de direction u d Mouvement hélicoïdal tangent Si le solide S est en mouvement quelconque par rapport au référentiel R, l axe central existe mais dépend du temps A un instant donné, on peut toujours décomposer { } d axe et d un couple de direction V = Ω { S / R } { S / R u, } + {, vm S / R u} M ( u) M ( u) V / en la somme d un glisseur C est la notion de mouvement hélicoïdal tangent L axe est appelé axe instantané de rotation (ou de viration) S R Rappel : Ω = v S / R A S / R P, AP + λ( P) Ω S / R Ω S / R Ω S / R existe sauf si Ω S / R = (mouvement de translation) V Mouvement plan sur plan a Définition Il y a mouvement plan sur plan d un solide S par rapport à un solide S si un plan Π de S reste toujours confondu avec un plan Π de S b Centre instantané de rotation (CIR) Soient A et B deux points de Π, plan du solide S dans le mouvement plan sur plan par rapport au solide S v = vb + Ω A S / S S / S S / S BA Si A et B appartiennent à Π, ils restent toujours dans Π (et donc dans Π ) Donc BA, vb S / S sont des vecteurs de Π v A S / S et Donc Ω / S Π S Donc l axe instantané de rotation est perpendiculaire à Π Soit I = Π (point d intersection du plan et de l axe), I est appelé centre instantané de rotation du mouvement de S par rapport à S
50 Ainsi De plus, car Donc, vi S / S est un vecteur de Π et Si I Ω =, v I S / S S / S v Ω I S / S S S / Ω S / S est perpendiculaire à Π Si I, vi S / S = A Π, v A S / S = Ω S / S IA Ω S / S IA A Π, AI = Ω Ω S / S S / S Construction graphique du CIR (point I) : Considérons deux points A et B du solide S, auxquels on affecte les vitesse v A et v B dans le mouvement de S par rapport à S Pour ces deux moments, v A = Ω S S IA / v = Ω IB Le CIR (point I) appartient donc aux droites : - D A issue de A et perpendiculaire à v A - D B issue de B et perpendiculaire à v B B S / S I est donc le point d intersection de ces deux droites D B v A D A v B B A Ω S / S I
51 c Base et roulante On appelle base du mouvement plan sur plan d un solide S par rapport à un repère R la trajectoire des CIR dans le repère R On appelle roulante du mouvement plan sur plan d un solide S par rapport à un repère R la trajectoire des CIR dans un repère lié à S Propriété : La base et la roulante d un mouvement donné sont deux courbes tangentes (en I) qui roulent l une par rapport à l autre sans glisser Exemple : Considérons une échelle appuyée sur un mur Cette dernière glisse Base Roulante D B A v A S / R I D A Mur O R Echelle B v B S / R OBIA est un rectangle de diagonale AB = Cte (au cours du temps) - AB = Cte = OI, donc la base est un quart de cercle de centre O et de rayon AB - BIA est un triangle rectangle d hypoténuse AB, donc la roulante est un demi cercle de diamètre AB d Théorème des trois plans glissants Soient S et S deux solides dans un mouvement plan sur plan l un par rapport à l autre et par rapport à un repère R On appelle Π le plan commun au deux solides dans ce mouvement On prend de plus les notations suivantes :
52 Ω le vecteur rotation de S /R Ω le vecteur rotation de S /R Ω le vecteur rotation de S /S I le CIR de S /R I le CIR de S /R I le CIR de S /S Soit u le vecteur unitaire de la normale à Π On peut alors poser Ω u = Ω Ω = Ω u Ω = Ω u Et on a II = Ω I I C est à dire, entre autre, que I, I, et I sont alignés Ω
53
54 Vision générale du problème z x y y z x n ψ O R R θ ( ), et y x n z z n Pour passer d une base à l autre n n z z z v v n n z z z x y y x w w ϕ θ ψ θ n z v = n z w =
55 S S I I I I S S A t A t + t
56 Ω S/S Ω pivotement I Ω roulement L a L e L b L c 4 L d chaîne simple chaîne complexe (3 chaînes simples) 3
57
58 Exemple de liaison équivalente et graphe minimal de liaison :
59
60
61
62
63 STATIQUE
64
65
66
67 4 Modélisation globale des actions mécaniques exercées sur un solide S indéformable (ou ensemble de solides indéformables) Si S est un solide indéformable Ω /, M, N S, v / + Ω / D où S R N S R S R NM P ds ( S / S, R) = fv ( M ) vm S / R dv + f S ( M ) vm SS / R M S M S S P( S / S, R) = M S M S f V ( M ) v N S / R dv + M S f S ( fv ( M ), Ω S / R, NM ) dv + ( f S ( M ), Ω S / R, NM ) S ( M ) v M S S N S / R ds + P( S / S, R) = fv ( M ) dv + f S ( M ) ds vn S / R + NM fv ( M ) dv + NM f S ( M ) ds Ω M S M S S M S M S S R S / est la somme des efforts (surfacique et volumique) ; c est un vecteur indépendant du point S choisit pour l exprimer Par contre, est un champ (dépendant du point N choisi pour l exprimer) R S / S M N S / S ds M N S / S S / R Détermination de la nature du champ M N S / S : Ecrivons ce champs en un autre point, appelé A Pour simplifier les calculs, seuls les forces volumiques seront prises en compte M = AM f M N S / S M A S / S A S / S M S = AN = M N S / S M S f V V ( M ) dv ( M ) dv + + AN R est donc un moment de torseur de résultante S / S M S R S / S NM sur S sont modélisées par un torseur (torseur des actions mécaniques) noté = R M { F S S } { S S, A S S } ( / ) / / A f V ( M ) dv Les actions mécaniques exercées par S Leur puissance dans le référentiel R est donné par la relation ( S / S, R) = { F S } { V } P / S S / R
68 R = f ( M ) dv + f ( M ) ds est la résultante des actions mécaniques de S sur S S / S N S / S M S V M S S M S S M = NM f ( M ) dv + NM f ( M ) ds mécaniques de S sur S V M S S S est le moment résultant en N des actions R S / S s exprime en Newton (N), M N S / S s exprime en newton-mètre (Nm) Remarque : - Dans le cas d un ensemble E de N solides noté S i (i=,,n), chaque intégrale se sépare en N intégrales et on met en évidence des quantités dont la somme vaut De même, on met en évidence des quantités M N E / S i R E / S i dont la somme vaut M N E / E R E / E - La modélisation des actions mécaniques par un torseur est une modélisation globale qui permet de rendre le calcul plus facile par rapport aux intégrales de la modélisation globale - Par intégration des champs surfaciques et volumiques (localisation locale), on obtient le torseur associé (modélisation globale), mais l inverse n est pas possible 5 Exemples d actions mécaniques a Champs de pesanteur Tout point M de masse m est soumis à une force attractive au voisinage de la terre dirigé vers le centre de la terre On la note F pes = mg Un solide S, ensemble de points M est soumis à une force de résultante F = g( M ) dm pes M S dm est l élément de masse de l élément de volume dv entourant le point M courant Le solide étant petit comparé à la terre, D où où m est la masse du solide F g( M ) Cte = g pes g dm = m g = M S Le moment résultant en un point G des forces volumiques de pesanteur est
69 M = g MG dm G, Fpes / S Propriété : Il existe un point unique G en lequel MG dm = Ce point s appelle le centre de gravité de S En ce point, M = G, Fpes / S M S M S De cette propriété, nous pouvons en déduire que A, M S MA dm + M S M S AG dm = A, AG = AM dm m Pour un solide unique S, le centre de gravité G est lié à S Considérons à présent N solides S i de centre de gravité G i et de masse m i On peut écrire N i= M Si N i= M Si N i= MG dm m G A + i i= = MG dm + i i N i i i= M Si m AG = D où AG = m i N G A dm + i N i= i m i AG i N i= M Si AG dm i = Résumé : Les actions mécaniques de pesanteur sont modélisées par le torseur F = mg, { pes } { } G qui est un glisseur d axe passant par G Le centre de gravité G d un solide est défini par A, AG = AM dm m M S A Paris au niveau du sol, g - = 9,8 ms = 9,8 Nkg - b Cas d une force surfacique localisée Considérons un solide S soumis à des forces surfaciques localisées
70 S f S ( M ) ds La résultante de ces forces surfaciques est Leurs moment en un point P est donné par M S S f S M S S PM ( M ) ds = R f S fs ( M ) ds = M Il est possible de montrer que il existe un point P tel que ce moment soit nul Ainsi, en ce point P, le torseur des efforts surfaciques s écrit { F } { R, = } f S fs P Si les efforts surfaciques sont constants sur la surface, P est le centre d inertie de la surface S S du solide S Si ces efforts ne sont pas constants sur la surface, P n est plus son centre d inertie mais reste en général à l intérieur de cette surface P, fs c Soit un solide S soumis à des actions mécaniques assimilables à deux glisseurs L un des glisseur passe par le point P, l autre par le point P S F S F Les torseurs de ces deux efforts s écrivent F F, {, } { } P F avec F = F Le torseur résultant de ce couple de force s écrit : F = F + F { } {, } { } { }, =, P F, F P P P F P La résultante de deux glisseurs de résultantes opposées et un couple
71 II Modélisation des actions mécaniques transmissibles par les liaison parfaites Rappel La puissance des actions mécaniques exercées sur un solide S par S s écrit ( S / S, R) F V = R v + M Ω { } { } A S / R S R P = S / S A, S / S / Définition d une liaison parfaite Une liaison entre deux solides S et S est parfaite si la puissance des interefforts dans cette liaison est nulle dans le mouvement de S par rapport à S 3 Torseur statique d une liaison parfaite Il peut se déduire du torseur cinématique de la liaison correspondante Voir feuille des torseurs cinématiques des liaisons classiques Quelques exemple : Liaison Encastrement Pivot Glissière Hélicoïdale Pivot glissant Torseur statique R R R x y z M M M x y z P P P Rx P sur l axe Ox de la liaison Ry M y pivot Rz M z Ry Rz M M M x y z P P P P sur l axe Ox de la liaison Ry M y hélicoïdale Rz M z P sur l axe Ox de la liaison Ry M y pivot glissant Rz M z P
72 Rotule O z y x R R R O centre de la sphère Appui plan P y x z M M R P Ponctuelle P R x P sur l axe Ox, axe perpendiculaire à la surface sur laquelle l effort s applique
73
74 Or { F } = { R M } { }, = E / E E / E A, E / E A en statique 6 Enoncé du principe fondamental de la statique Il existe au moins un repère galiléen R tel que pour tout système matériel E en équilibre dans ce repère, le torseur résultant de toutes les actions mécaniques extérieures à E exercées sur E est nul { } { } F E = / E 7 Détermination des actions mécaniques Chaque écriture du principe fondamental de la statique donne deux équations vectorielles, c est à dire 6 équations scalaire, qui donnent des informations sur les actions mécaniques mises en jeu Méthode : - On isole un système (solide ou ensemble de solides) - On fait le bilan des torseurs d efforts extérieurs exercés sur ce système (action de contact, à distance, de liaison) - On écrit le principe fondamental de la statique relativement à ce système - On résout, et si c est possible on trouve toutes les inconnues - Sinon, on isole un autre système et on recommence 8 Théorème des actions mutuelles Soient deux systèmes E et E disjoints, et E le système englobant les deux précédents (E = E + E ) E est en équilibre sous l actions des torseurs d effort { } E / E { } + { F } { } / E / E = E E E est en équilibre sous l actions des torseurs d effort { } E / E F et { F } F () { } + { F } { } / E / E = E E E est en équilibre sous l actions des torseurs d effort { } E / E { } { F } { } E / E F et { F } F () + = E / E E E / E / E F et { } F E / E F (3) Les trois équations précédentes donnent ( ( ) + () (3) ) { F E } { F } { } / + E = E E /, d où, d où
75 Rappel : Pour deux solides S et S, On a de plus { V } = { V } S S S / / S Donc { F } = { F } E / E E E / { F } { V } P( S / S, ) P( S / S, R) = S / S S / S = R 9 Cas particuliers a Solide en équilibre sous l action de deux forces ponctuelles F S B F A - F en A : { F } { F, = } A F / - F en B : S { F } { F, = } B F / S En écrivant le principe fondamental de la statique : F, A + F, F, + F, { } { } = { } { } { F BA} = { } A On obtient donc le système d équations scalaires suivant : F + F = F et F sont colinéaires AB F = AB et F sont colinéaires (ou bien B A AB = ) Un solide soumis à deux efforts est en équilibre si ces deux efforts sont égaux en norme, de sens opposés et de même support (la droite AB, où A et B sont leurs points d application) F S B A F
76 b Solide soumis à trois efforts ponctuels S C B A F 3 F Les trois efforts s écrivent F = F F S, / F = F F / S, F = F, { } { } A { } { } = { F } B, F BA A { } { 3 } C = { F3, F3 CA} A F / S 3 F L écriture du principe fondamental de la statique donne les équations vectorielles suivantes : F + F + F3 = F BA + F CA = On pose N = F BA = F3 3 CA N est orthogonal à F et F 3 par construction, et donc à F (par la première équation du principe fondamental de la statique, F N ) = N est orthogonal à AB et AC par construction, et donc au plan ABC noté Π F est appliquée en A, F est appliquée en B, F 3 est appliquée en A, F N et N Π F Π F N et N Π F Π F N 3 et N Π F 3 Π Les droites (support de F ), (support de F ) et 3 (support de F 3 ) sont donc coplanaires On considère que et sont parallèle F et F sont donc colinéaires, on pose F = λf Ainsi, la première équation du principe fondamental de la statique permet d écrire F 3 = + λ F ( ) On en déduit que, et 3 sont parallèles On considère maintenant I, le point d intersection de et En ce point les trois torseurs d effort F F F F = F, IC F On déduit donc de s écrivent { } = { } I, { } = { } I et { } { 3 } I F / S, F / S, F F / S 3 3
77 l équation de moment donnée par l écriture du principe fondamental de la statique que IC F =, et donc que 3 passe aussi par I 3 En conclusion, un solide soumis à trois efforts est en équilibre si ces trois efforts sont - coplanaires en support - de somme nulle - de supports parallèles ou concourants c Exemple I // IB F A A G B // IA P P F B Les torseurs d effort dans cet exemple s écrivent : { Fpas / S } = { P, } G Fpivot / S = R, M A avec M z = Fpivot / S = R, A le problème étant en F = F, où est perpendiculaire au plan tange { } { } { } { } D { } { } nt ponctuel / S B F IV Modélisation des actions mécaniques transmissibles par une liaison non parfaite Mise en évidence du caractère non parfait de la liaison y S G mg F / S n n= x Si l appui plan F / S est parfait, il est de support perpendiculaire au plan Si il n y a que deux effort, le principe fondamental de la statique ne peut être vérifié Pour qu il soit vérifié, il faut donc que l effort F / S s oppose au poids du solide mg y F / S =
78 Ce qui signifie donc que manière suivante : F / S n est pas perpendiculaire au plan, et que cette force s écrit de la [ F / S ( F / S n) n] + ( F / S n) n = T / S + N S F / S = / Perpendiculaire au plan La configuration réelle est donc la suivante : y T / S S G mg F / mouvement, on parle de frottement d adhérence S N / S n n= x La composante tangentielle de la réaction du plan sur le solide est non nulle ( T ) Dans cette / S liaison, la puissance s écrit P( / S, R) v A T / = S / S Cette puissance étant non nulle, la liaison n est ici pas parfaite On dit que la liaison développe du frottement S il y a mouvement, on parle de frottement de glissement ; s il n y a pas Modélisation des actions mécaniques transmissibles par une liaison ponctuelle (Modèle de Coulomb) Soient deux solides S et S en contacte ponctuel l un avec l autre en un point I L un au moins des solides a une surface suffisamment régulière pour que l on puisse définir un plan tangentiel Π en I au deux solides S n normé I Plan tangentiel Π S Remarque : Cette représentation est valable pour des liaisons sphère/plan, sphère/sphère ou cône/sphère mais pas pour une liaison cône/cône Le torseur d effort exercé par S sur S s écrit en I { FS S } { RS S, } / = / I avec R S / S = N n + où T n est la composante tangentielle T
79 Ainsi T = R = n ( RS / ) ( ) / ( / ) S n n = n n R R n S S S S ( R n ) S / S S / S n Loi de Coulomb : La nature du contact entre S et S est caractérisée par un coefficient f, appelé coefficient de frottement - si f =, alors T = - si f, alors a) si v I S S =, T < f N / b) si v, I S / S T = f N T vi S / S = T v < I S / S Quelques exemples : R S/S F S/S N n ϕ tanϕ = f n ϕ I v I S/S Π T s oppose au mouvement de S par rapport à S P T = < / S v I S / Il y a donc perte de puissance R S / S est à l intérieur du cône de frottement NB : dans le dessin à gauche, R est au bord de ce cône S / S
80 Remarque : Physiquement, un contact ponctuel associé à un effort correspond à une pression infinie, ce qui n est pas possible En fait, ce genre d effort entraîne une légère déformation du point de contact, qui s aplatit pour former une surface de contact S S avec I Pour corriger cela, on peut considérer que F = R, M R M S / S { S S } { S S I S S } / /, / I donné par les lois de Coulomb = M n + M avec n I, S / S t M t = M est une composante de résistance au pivotement M t est une composante de résistance au roulement Par analogie avec les lois de Coulomb : M δ N selon que Ω pivotement est nul ou non (pour l égalité) M t µ N selon que Ω roulement est nul ou non (pour l égalité) la seule différence avec la loi de Coulomb est que µ et δ sont homogènes à des longueurs 3 Quelques valeurs de coefficients Matériaux f à sec f lubrifié µ Acier Acier,3, 5 à µm Bronze Acier,,8 Acier Nylon,5, Acier PTFE,,5 Acier Aluminium,4 Acier Garniture,3 Pneu - Chaussée,6 5 à mm 4 Liaisons surfaciques non parfaites On admet que le champ surfacique des efforts vérifie en tous points les lois de Coulomb df = dn n + dt Cette relation est exploitable pour des surfaces simples
81 ASSERVISSEMENT
82
83
84 S d section droite S g section gauche
85
86
87 Représentation d un système asservi linéaire invariant Entrée consigne x(t) Système asservi linéaire invariant y(t) sortie L équation différentielle linéaire à coefficient constant régissant ce genre de système s écrit, de manière générale n n m m d y( t) d y( t) dy( t) d x( t) d x( t) dx( t) an + a a a y( t) b b b b x( t) n n = n m + m m m dt dt dt dt dt dt où le second membre (à droite ) est connu En pratique, n m Dans le cas contraire, à une entrée finie pourrait correspondre une sortie infinie 3 Méthode de résolution Il faut résoudre l équation, c est à dire trouver y(t) pour un x(t) donné Une méthode classique pour ce genre de problème est de trouver une solution générale de l équation sans second membre, puis une solution particulière La solution finale sera combinaison linéaire des deux précédentes III Transformée de Laplace, application aux systèmes asservis linéaires Définition Soit f(t) une fonction telle que t <, f ( t) = La transformée de Laplace d une telle fonction est définie par L tp ( f ( t)) = F( p) = f ( t) e dt Fonctions usuelles et leur transformée de Laplace a Fonction échelon (Heaviside) u(t) = pour t > u(t) = pour t < pt e L( u( t)) e dt = = = p pt p t
88 b Fonction impulsion (dirac) /t δ(t) = pour t R * δ() non défini mais δ ( t) dt = L( δ ( t)) = lim t e t pt t dt = lim t p t pt t [ e ] = t t c Autres fonctions usuelles (nulles pour t<) les autres fonctions souvent rencontrée seront les fonction sin( ω t) u( t), cos( ω t) u( t), voir feuille pages plus tôt voir feuille pages plus tôt 3 Propriétés des transformées de Laplace 4 Application à la résolution des systèmes asservis : Fonction de transfert Le système asservi est représenté par l équation différentielle n n m m d y( t) d y( t) dy( t) d x( t) d x( t) dx( t) an + a a a y( t) b b b b x( t) n n = n m + m m m dt dt dt dt dt dt En réalité, cette équation est à multiplier par la fonction de Heaviside de chaque coté (l équation n est pas définie pour des temps négatifs) La transformée de Laplace de cette équation s écrit n m d y( t) d x( t) a L u( t) a L n m m dt + + dt ( y( t) u( t) ) = b L u( t) + b L( x( t) u( )) n + t On considère que les conditions initiales sont nulles (autrement dit y( ) = x( ) = y ( ) = x ( ) =, ) Ainsi, l équation précédente s écrit a où Y ( p) = L( y( t)) X ( p) = L( x( t)) n m p Y ( p) + + a Y ( p) = b p X ( p) + b X ( p) n m + Ceci revient à écrire que
89 b Y ( p) = a + b p + + b + a p + + a m p n p m n X ( p) H(p) H(p) est une fraction rationnelle, on l appelle la fonction de transfert du système Les entrée possibles X(p) sont aussi des fractions rationnelles, donc Y(p) est une fraction rationnelle également La résolution se fait par décomposition en éléments simples de H ( p) X ( p), puis par application de la transformée inverse de Laplace de chacun des éléments simples ainsi obtenus + Remarque : Si les conditions initiales ne sont pas nulles, si par exemple y ( ), il faudra rajouter + + n + à l équation précédente un terme de la forme a y ( ) a p y ( ) a p y ( ) Ainsi, n a + a3 p + + an p Y ( p) = H ( p) X ( p) + y ( n a + a p + + a p 3 + n ) n 5 Application au servomécanisme de I-4 L équation différentielle est Il existe une position de repos donnée par S g y + K y = K x x = y = x On introduit donc les variables ~ x = x x et ~ y = y x Ces variables sont à conditions initiales nulles L équation différentielle devient : ( ~ y + x ) + K ( ~ y + x ) = K ( ~ x ) S g + x Soit S g ~ y + K ~ y = K ~ x On peut donc utiliser l équation S g y + K y = K x avec conditions initiales nulles pour x et y Cette équation devient, par transformée de Laplace S g p Y ( p) + K Y ( p) = K X ( p) Soit K Y ( p) = X ( p) = X ( p) K + S p + τ p g où τ = S g / K
90 La fonction de transfert du premier ordre du système s écrit H ( p) = +τ p a Réponse à un échelon L entrée est définie par x ( t) = X u( t) ce qui donne, par transformée de Laplace X ( p) = La transformée de Laplace s écrit donc, compte tenu de la fonction de transfert du système, Y ( p) = X X p p +τ p On effectue la décomposition en éléments simples de cette fraction rationnelle Y ( p) = En multipliant l équation par p et en prenant p =, En multipliant l équation par a p + τ p et en prenant b + +τ p p Y ( p) X = a = p = τ p ( + τ p ) Y ( p) = X τ = b En conclusion, la transformée de Laplace de la sortie s écrit donc Y ( p) = X p X τ + τ p Ce qui donne, en prenant la transformée inverse de Laplace de cette équation, t / τ ( e ) u( ) y( t) = X t X x(t) y(t) τ t
91 Quelques remarques : x y () = lim p Y ( p) = y( ) = lim p Y ( p) = p τ p y( ) = lim p Y ( p) = X p Le système est plus rapide si τ diminu, c est à dire si S g diminue ou K augmente b Réponse à une rampe L entrée est définie par x ( t) = v t u( t) ce qui donne, par transformée de Laplace X ( p) = v p La transformée de Laplace s écrit donc, compte tenu de la fonction de transfert du système, Y ( p) = p v ( +τ p ) On effectue la décomposition en éléments simples de cette fraction rationnelle Y α p) = + p ( En multipliant l équation par p² et en prenant p =, β γ + p + τ p p Y ( p) v En multipliant l équation par p et en prenant p =, = = β p Y ( p) γ = = α + τ En multipliant l équation par + τ p et en prenant p = τ p ( + τ p ) Y ( p) = v τ = γ En conclusion, la transformée de Laplace de la sortie s écrit donc Y ( p) = v p v τ v τ + p + τ p Ce qui donne, en prenant la transformée inverse de Laplace de cette équation, t / τ ( t τ + τ e ) u( ) y( t) = v t
92 x(t) v y(t) τ t Quelques remarques : y( ) = lim p Y ( p) = p y( ) = lim p Y ( p) = p y () = lim p Y ( p) = y ( ) = lim p Y ( p) = v p p lim x( t) y( t) = lim p X ( p) Y ( p) = v Erreur : ( ) τ t p c Réponse à une mise hors équilibre y( + ) = y On repart de l équation différentielle du système, mais cette fois ci, l entrée est nulle Par transformée de Laplace, cette équation devient S g S g y + K y = K x = ( p Y ( p) y ) + K Y ( p) = Soit τ Y ( p) = y + τ p avec τ = S g / K D où, par transformée inverse de Laplace, t / τ y( t) = y e u( t)
93 y(t) y τ t d Réponse à une entrée harmonique L entrée est donnée par ( ω t) u( ) x( t) = X sin t Ce qui donne par transformée de Laplace X ω X ( p) = p + ω Soit la transformée de Laplace de la sortie Y ( p) = X ω ( + τ p)( p + ω ) On décompose cette fraction rationnelle en éléments simples Y ( p) = α τ + β p + γ ( + p) ( p + ω ) En multipliant l équation par + τ p et en prenant p = τ p En multipliant l équation par X ω + ω τ ( + τ p) Y ( p) = = α p + ω et en prenant p = jω X ω = + jω τ jω β + γ Ce qui permet de déterminer en égalant les parties imaginaires, puis les parties réelles X ω X ω τ γ = et β = + ω τ + ω τ Ainsi, la transformée de Laplace de la sortie s écrit
94 ) ( ω ω τ ω ω τ ω ω τ τ τ τ ω ω τ = p X p p X p X p Y Soit, après transformée inverse de Laplace ( ) ) ( ) sin( cos ) ( / t u t X t X e X t y t = ω τ ω ω τ ω ω τ τ ω τ ω τ ( ) ) ( ) sin( cos ) ( ) ( / t u t t X t u e X t y t = ω τ ω ω τ ω ω τ τ ω τ ω τ ω τ On pose ϕ tel que cos sin τ ω ϕ τ ω ω τ ϕ + = + = Ainsi, l équation temporelle régissant la sortie du système s écrit ( ) ) ( sin ) ( / t u t X e X t y t = ϕ ω τ ω τ ω τ ω τ x(t) y (t) t y (t) Interprétation : En régime permanent, la sortie est une sinusoïde atténuée et retardée par rapport à l entrée d amplitude < + τ ω X de déphasage ) arctan( τ ω plus ωτ augmente, plus le déphasage ϕ augmente e Réponse à une entrée harmonique avec y( + ) = y Le système est linéaire La réponse dans ce cas est donc la somme Régime transitoire y (t) Régime permanent Y (t)
95 - de la réponse du cas précédent - de celle du cas où x( t) = y( + ) = y x( t) = X sin y( + ) = ( ω t) u( t) La réponse temporelle s écrit donc Réponse libre Réponse forcée y( t) = t / τ X ω τ t / τ X y e u( t) + e u( t) + sin t + ω τ + ω τ ( ω t + ϕ ) u( ) Réponse transitoire Réponse permanent La réponse libre dépend des conditions initiales et pas de l entrée La réponse forcée dépend de l entrée et pas des conditions initiales Le signe du pôle de la fonction de transfert, négatif, conduit à des termes en exponentielles décroissantes, ce qui correspond à un régime transitoire Attention, des pôles positifs ou à partie réelle positive conduisent à un système instable IV Schéma bloc La notion de fonction de transfert H(p) où Y ( p) = H ( p) X ( p) conduit à la notion de schéma bloc, où l on représente le système linéaire par X(p) H(p) Y(p) Un système donné sera composé d un ensemble de sous ensembles simples, ou élémentaires, pouvant chacun être remplacés par un bloc élémentaire Bloc en cascade : X (p) H (p) X (p) X (p) H(p) H (p) Y(p) Y(p) Y ( p) = X ( p) H ( p) X Y ( p) = H ( p) X X ( p) = H ( p) ( p) ( p) où H p) = H ( p) H ( ) ( p
96 Bloc en parallèle : X(p) H (p) H (p) + + Y(p) Y ( p) = H( p) X ( p) + H ( p) X ( p) Y ( p) = H ( p) X ( p) où H p) = H ( p) + H ( ) ( p Exemple : X(p) + _ G(p) action Y(p) ( + R( p) G( p) ) G( p) X ( ) Y ( p) = p R(p) acquisition G( p) H ( p) = + R( p) G( p) R ( p) G( p) est la fonction de transfert en boucle ouverte du système H ( p) est la fonction de transfert en boucle fermée du système Systèmes élémentaires : - Système proportionnel - Système du er ordre - Système intégrateur Equation différentielle : y ( t) = K x( t) Fonction de transfert : H ( p) = K Equation différentielle : τ y ( t) + y( t) = K x( t) Fonction de transfert : K H ( p) = +τ p Equation différentielle : y ( t) = K x( t) Fonction de transfert : - Système du er ordre généralisé H ( p) = Equation différentielle : τ y ( t) + y( t) = K ( x( t) + a τ x ( t) ) Fonction de transfert : K p + a τ p H ( p) = K + τ p
97 - Système du nd ordre y( t) ξ Equation différentielle : + y ( t) + y( t) = K x( t) ω ω Fonction de transfert : K H ( p) = ξ p + p + ω ω Pour les systèmes sans intégration, la valeur de y(t) au bout d un temps infini est (si elle existe) lim y( t) = lim py ( p) = lim ph ( p) X ( p) = lim H ( p)lim px ( p) = H ()lim x( t) t p p On appelle K le gain statique du système p lim y( t) = Klim x( t) t t p t Pour le système du er ordre, on a vu que la réponse à un échelon x ( t) = X u( t) est y /τ ( e ) ( ) t t K X KX pour = où τ est la constante de temps du système y(t) atteint 95% de sa valeur final t 5 = 3τ %
98
99
100
101
102
103
104
105
106 Diagramme de Bode Système proportionnel G db H ( p) = K Système intégrateur G db H ( p) = K p log K log K db (pente de db par décade) ω ω ϕ ϕ ω ω -π/
107 Système du er ordre G db log K ϕ Bande passante à 3dB K H ( p) = +τ p ω 3dB - db/décade En rouge : diagramme asymptotique En bleu : courbe réelle ω Erreur réalité / asymptote : ωτ << log K log K = log( + ω τ ) + ω τ Ceci est maximum pour ω = /τ, et vaut 3 db en ce point K K + ω τ ωτ << log log = log( ) τω + ω τ τ ω Ceci est maximum pour ω = /τ, et vaut 3 db en ce point Arguments : ωτ >> ϕ = 9 ωτ << ϕ = ϕ = arctan(ωτ ) Bande passante = 3 db : Domaine de fréquence pour lequel G(ω) vaut G( ) 3 db -π/4 -π/ Gain : ( + ω ) G = log K log τ ω τ << G = log K ω τ >> G = log K logτ logω
108 Système du nd ordre H ( p) = K p p + ξ + ω ω Gain : ω ω G = log K log + 4ξ τ ω Argument : ω ξ ω ϕ = arctan ω ω On distingue plusieurs cas selon la valeur de ξ La fonction de transfert peut se mettre sous la forme K H ( jω ) = + jω ω G db log K 6dB -4 db/décade ξ = La fonction de transfert peut se mettre sous la forme K H ( jω) = + jτ ω + jτ ω -π G db log K ϕ -π/ G db /τ ( )( ) τ τ /τ ω 3dB En rouge : diagramme asymptotique En bleu : courbe réelle - db/décade 3dB ω ξ > -4 db/décade ξ < log K ω ω ϕ -π/ -π En rouge : diagramme asymptotique En bleu : courbe réelle ω ϕ -π/ ω r ω ω En rouge : diagramme asymptotique En bleu : courbe réelle ω -π La pulsation de résonance (si elle existe) est définie par d H ( jω) ω = ω + + ξ = dω ω Cette relation est vérifiée pour ω = ω / ω = ξ Il y a résonance si ξ < / La pulsation de résonance vaut alors ω r = ω ξ Le gain à la résonance vaut K H ( jω r ) = ξ ξ
109
110 Autre cas H ( p) = K( + jωτ ) G db db par décade log K 3 db ω ϕ π/ ω
Automatique Linéaire 1 Travaux Dirigés 1A ISMIN
 Automatique Linéaire 1 Travaux Dirigés Travaux dirigés, Automatique linéaire 1 J.M. Dutertre 2014 TD 1 Introduction, modélisation, outils. Exercice 1.1 : Calcul de la réponse d un 2 nd ordre à une rampe
Automatique Linéaire 1 Travaux Dirigés Travaux dirigés, Automatique linéaire 1 J.M. Dutertre 2014 TD 1 Introduction, modélisation, outils. Exercice 1.1 : Calcul de la réponse d un 2 nd ordre à une rampe
Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant
 Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant I Présentation I.1 La roue autonome Ez-Wheel SAS est une entreprise française de technologie innovante fondée en 2009.
Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant I Présentation I.1 La roue autonome Ez-Wheel SAS est une entreprise française de technologie innovante fondée en 2009.
Concours EPITA 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette BMW K1200S
 Concours EPIT 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette MW K1200S Durée : 2h. Calculatrices autorisées. Présentation du problème Le problème
Concours EPIT 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette MW K1200S Durée : 2h. Calculatrices autorisées. Présentation du problème Le problème
SCIENCES INDUSTRIELLES POUR L INGÉNIEUR. Partie I - Analyse système
 SCIENCES INDUSTRIELLES POUR L INGÉNIEUR COMPORTEMENT DYNAMIQUE D UN VEHICULE AUTO-BALANCÉ DE TYPE SEGWAY Partie I - Analyse système Poignée directionnelle Barre d appui Plate-forme Photographies 1 Le support
SCIENCES INDUSTRIELLES POUR L INGÉNIEUR COMPORTEMENT DYNAMIQUE D UN VEHICULE AUTO-BALANCÉ DE TYPE SEGWAY Partie I - Analyse système Poignée directionnelle Barre d appui Plate-forme Photographies 1 Le support
Représentation géométrique d un nombre complexe
 CHAPITRE 1 NOMBRES COMPLEXES 1 Représentation géométrique d un nombre complexe 1. Ensemble des nombres complexes Soit i le nombre tel que i = 1 L ensemble des nombres complexes est l ensemble des nombres
CHAPITRE 1 NOMBRES COMPLEXES 1 Représentation géométrique d un nombre complexe 1. Ensemble des nombres complexes Soit i le nombre tel que i = 1 L ensemble des nombres complexes est l ensemble des nombres
Chafa Azzedine - Faculté de Physique U.S.T.H.B 1
 Chafa Azzedine - Faculté de Physique U.S.T.H.B 1 Définition: La cinématique est une branche de la mécanique qui étudie les mouements des corps dans l espace en fonction du temps indépendamment des causes
Chafa Azzedine - Faculté de Physique U.S.T.H.B 1 Définition: La cinématique est une branche de la mécanique qui étudie les mouements des corps dans l espace en fonction du temps indépendamment des causes
Chapitre 0 Introduction à la cinématique
 Chapitre 0 Introduction à la cinématique Plan Vitesse, accélération Coordonnées polaires Exercices corrigés Vitesse, Accélération La cinématique est l étude du mouvement Elle suppose donc l existence à
Chapitre 0 Introduction à la cinématique Plan Vitesse, accélération Coordonnées polaires Exercices corrigés Vitesse, Accélération La cinématique est l étude du mouvement Elle suppose donc l existence à
STATIQUE GRAPHIQUE ET STATIQUE ANALYTIQUE
 ÉCOLE D'INGÉNIEURS DE FRIBOURG (E.I.F.) SECTION DE MÉCANIQUE G.R. Nicolet, revu en 2006 STATIQUE GRAPHIQUE ET STATIQUE ANALYTIQUE Eléments de calcul vectoriel Opérations avec les forces Equilibre du point
ÉCOLE D'INGÉNIEURS DE FRIBOURG (E.I.F.) SECTION DE MÉCANIQUE G.R. Nicolet, revu en 2006 STATIQUE GRAPHIQUE ET STATIQUE ANALYTIQUE Eléments de calcul vectoriel Opérations avec les forces Equilibre du point
SYSTEMES LINEAIRES DU PREMIER ORDRE
 SYSTEMES LINEIRES DU PREMIER ORDRE 1. DEFINITION e(t) SYSTEME s(t) Un système est dit linéaire invariant du premier ordre si la réponse s(t) est liée à l excitation e(t) par une équation différentielle
SYSTEMES LINEIRES DU PREMIER ORDRE 1. DEFINITION e(t) SYSTEME s(t) Un système est dit linéaire invariant du premier ordre si la réponse s(t) est liée à l excitation e(t) par une équation différentielle
Oscillations libres des systèmes à deux degrés de liberté
 Chapitre 4 Oscillations libres des systèmes à deux degrés de liberté 4.1 Introduction Les systèmes qui nécessitent deux coordonnées indépendantes pour spécifier leurs positions sont appelés systèmes à
Chapitre 4 Oscillations libres des systèmes à deux degrés de liberté 4.1 Introduction Les systèmes qui nécessitent deux coordonnées indépendantes pour spécifier leurs positions sont appelés systèmes à
CABLECAM de HYMATOM. Figure 1 : Schéma du système câblecam et détail du moufle vu de dessus.
 CABLECAM de HYMATOM La société Hymatom conçoit et fabrique des systèmes de vidéosurveillance. Le système câblecam (figure 1) est composé d un chariot mobile sur quatre roues posé sur deux câbles porteurs
CABLECAM de HYMATOM La société Hymatom conçoit et fabrique des systèmes de vidéosurveillance. Le système câblecam (figure 1) est composé d un chariot mobile sur quatre roues posé sur deux câbles porteurs
Automatique Linéaire 1 1A ISMIN
 Automatique linéaire 1 J.M. Dutertre 2014 Sommaire. I. Introduction, définitions, position du problème. p. 3 I.1. Introduction. p. 3 I.2. Définitions. p. 5 I.3. Position du problème. p. 6 II. Modélisation
Automatique linéaire 1 J.M. Dutertre 2014 Sommaire. I. Introduction, définitions, position du problème. p. 3 I.1. Introduction. p. 3 I.2. Définitions. p. 5 I.3. Position du problème. p. 6 II. Modélisation
10 leçon 2. Leçon n 2 : Contact entre deux solides. Frottement de glissement. Exemples. (PC ou 1 er CU)
") 0 leçon 2 Leçon n 2 : Contact entre deu solides Frottement de glissement Eemples (PC ou er CU) Introduction Contact entre deu solides Liaisons de contact 2 Contact ponctuel 2 Frottement de glissement 2
0 leçon 2 Leçon n 2 : Contact entre deu solides Frottement de glissement Eemples (PC ou er CU) Introduction Contact entre deu solides Liaisons de contact 2 Contact ponctuel 2 Frottement de glissement 2
Fonctions de plusieurs variables
 Module : Analyse 03 Chapitre 00 : Fonctions de plusieurs variables Généralités et Rappels des notions topologiques dans : Qu est- ce que?: Mathématiquement, n étant un entier non nul, on définit comme
Module : Analyse 03 Chapitre 00 : Fonctions de plusieurs variables Généralités et Rappels des notions topologiques dans : Qu est- ce que?: Mathématiquement, n étant un entier non nul, on définit comme
I - PUISSANCE D UN POINT PAR RAPPORT A UN CERCLE CERCLES ORTHOGONAUX POLES ET POLAIRES
 I - PUISSANCE D UN POINT PAR RAPPORT A UN CERCLE CERCLES ORTHOGONAUX POLES ET POLAIRES Théorème - Définition Soit un cercle (O,R) et un point. Une droite passant par coupe le cercle en deux points A et
I - PUISSANCE D UN POINT PAR RAPPORT A UN CERCLE CERCLES ORTHOGONAUX POLES ET POLAIRES Théorème - Définition Soit un cercle (O,R) et un point. Une droite passant par coupe le cercle en deux points A et
Calcul intégral élémentaire en plusieurs variables
 Calcul intégral élémentaire en plusieurs variables PC*2 2 septembre 2009 Avant-propos À part le théorème de Fubini qui sera démontré dans le cours sur les intégrales à paramètres et qui ne semble pas explicitement
Calcul intégral élémentaire en plusieurs variables PC*2 2 septembre 2009 Avant-propos À part le théorème de Fubini qui sera démontré dans le cours sur les intégrales à paramètres et qui ne semble pas explicitement
Cours d Analyse. Fonctions de plusieurs variables
 Cours d Analyse Fonctions de plusieurs variables Licence 1ère année 2007/2008 Nicolas Prioux Université de Marne-la-Vallée Table des matières 1 Notions de géométrie dans l espace et fonctions à deux variables........
Cours d Analyse Fonctions de plusieurs variables Licence 1ère année 2007/2008 Nicolas Prioux Université de Marne-la-Vallée Table des matières 1 Notions de géométrie dans l espace et fonctions à deux variables........
Angles orientés et trigonométrie
 Chapitre Angles orientés et trigonométrie Ce que dit le programme : CONTENUS CAPACITÉS ATTENDUES COMMENTAIRES Trigonométrie Cercle trigonométrique. Radian. Mesure d un angle orienté, mesure principale.
Chapitre Angles orientés et trigonométrie Ce que dit le programme : CONTENUS CAPACITÉS ATTENDUES COMMENTAIRES Trigonométrie Cercle trigonométrique. Radian. Mesure d un angle orienté, mesure principale.
Chapitre 1 Cinématique du point matériel
 Chapitre 1 Cinématique du point matériel 7 1.1. Introduction 1.1.1. Domaine d étude Le programme de mécanique de math sup se limite à l étude de la mécanique classique. Sont exclus : la relativité et la
Chapitre 1 Cinématique du point matériel 7 1.1. Introduction 1.1.1. Domaine d étude Le programme de mécanique de math sup se limite à l étude de la mécanique classique. Sont exclus : la relativité et la
Corrigé du baccalauréat S Pondichéry 12 avril 2007
 Corrigé du baccalauréat S Pondichéry 1 avril 7 EXERCICE 1 Commun à tous les candidats 4 points 1 a Les vecteurs AB et AC ont pour coordonnées AB ; ; ) et AC 1 ; 4 ; 1) Ils ne sont manifestement pas colinéaires
Corrigé du baccalauréat S Pondichéry 1 avril 7 EXERCICE 1 Commun à tous les candidats 4 points 1 a Les vecteurs AB et AC ont pour coordonnées AB ; ; ) et AC 1 ; 4 ; 1) Ils ne sont manifestement pas colinéaires
NOTICE DOUBLE DIPLÔME
 NOTICE DOUBLE DIPLÔME MINES ParisTech / HEC MINES ParisTech/ AgroParisTech Diplômes obtenus : Diplôme d ingénieur de l Ecole des Mines de Paris Diplôme de HEC Paris Ou Diplôme d ingénieur de l Ecole des
NOTICE DOUBLE DIPLÔME MINES ParisTech / HEC MINES ParisTech/ AgroParisTech Diplômes obtenus : Diplôme d ingénieur de l Ecole des Mines de Paris Diplôme de HEC Paris Ou Diplôme d ingénieur de l Ecole des
1S Modèles de rédaction Enoncés
 Par l équipe des professeurs de 1S du lycée Parc de Vilgénis 1S Modèles de rédaction Enoncés Produit scalaire & Corrigés Exercice 1 : définition du produit scalaire Soit ABC un triangle tel que AB, AC
Par l équipe des professeurs de 1S du lycée Parc de Vilgénis 1S Modèles de rédaction Enoncés Produit scalaire & Corrigés Exercice 1 : définition du produit scalaire Soit ABC un triangle tel que AB, AC
1 Définition. 2 Systèmes matériels et solides. 3 Les actions mécaniques. Le système matériel : Il peut être un ensemble.un sous-ensemble..
 1 Définition GÉNÉRALITÉS Statique 1 2 Systèmes matériels et solides Le système matériel : Il peut être un ensemble.un sous-ensemble..une pièce mais aussi un liquide ou un gaz Le solide : Il est supposé
1 Définition GÉNÉRALITÉS Statique 1 2 Systèmes matériels et solides Le système matériel : Il peut être un ensemble.un sous-ensemble..une pièce mais aussi un liquide ou un gaz Le solide : Il est supposé
SCIENCES INDUSTRIELLES (S.I.)
") SESSION 2014 PSISI07 EPREUVE SPECIFIQUE - FILIERE PSI " SCIENCES INDUSTRIELLES (S.I.) Durée : 4 heures " N.B. : Le candidat attachera la plus grande importance à la clarté, à la précision et à la concision
SESSION 2014 PSISI07 EPREUVE SPECIFIQUE - FILIERE PSI " SCIENCES INDUSTRIELLES (S.I.) Durée : 4 heures " N.B. : Le candidat attachera la plus grande importance à la clarté, à la précision et à la concision
F411 - Courbes Paramétrées, Polaires
 1/43 Courbes Paramétrées Courbes polaires Longueur d un arc, Courbure F411 - Courbes Paramétrées, Polaires Michel Fournié michel.fournie@iut-tlse3.fr http://www.math.univ-toulouse.fr/ fournie/ Année 2012/2013
1/43 Courbes Paramétrées Courbes polaires Longueur d un arc, Courbure F411 - Courbes Paramétrées, Polaires Michel Fournié michel.fournie@iut-tlse3.fr http://www.math.univ-toulouse.fr/ fournie/ Année 2012/2013
Chapitre 1 Régime transitoire dans les systèmes physiques
 Chapitre 1 Régime transitoire dans les systèmes physiques Savoir-faire théoriques (T) : Écrire l équation différentielle associée à un système physique ; Faire apparaître la constante de temps ; Tracer
Chapitre 1 Régime transitoire dans les systèmes physiques Savoir-faire théoriques (T) : Écrire l équation différentielle associée à un système physique ; Faire apparaître la constante de temps ; Tracer
Les correcteurs accorderont une importance particulière à la rigueur des raisonnements et aux représentations graphiques demandées.
 Les correcteurs accorderont une importance particulière à la rigueur des raisonnements et aux représentations graphiques demandées. 1 Ce sujet aborde le phénomène d instabilité dans des systèmes dynamiques
Les correcteurs accorderont une importance particulière à la rigueur des raisonnements et aux représentations graphiques demandées. 1 Ce sujet aborde le phénomène d instabilité dans des systèmes dynamiques
Cours de Mécanique du point matériel
 Cours de Mécanique du point matériel SMPC1 Module 1 : Mécanique 1 Session : Automne 2014 Prof. M. EL BAZ Cours de Mécanique du Point matériel Chapitre 1 : Complément Mathématique SMPC1 Chapitre 1: Rappels
Cours de Mécanique du point matériel SMPC1 Module 1 : Mécanique 1 Session : Automne 2014 Prof. M. EL BAZ Cours de Mécanique du Point matériel Chapitre 1 : Complément Mathématique SMPC1 Chapitre 1: Rappels
Continuité et dérivabilité d une fonction
 DERNIÈRE IMPRESSIN LE 7 novembre 014 à 10:3 Continuité et dérivabilité d une fonction Table des matières 1 Continuité d une fonction 1.1 Limite finie en un point.......................... 1. Continuité
DERNIÈRE IMPRESSIN LE 7 novembre 014 à 10:3 Continuité et dérivabilité d une fonction Table des matières 1 Continuité d une fonction 1.1 Limite finie en un point.......................... 1. Continuité
Corrigé Exercice 1 : BRIDE HYDRAULIQUE AVEC HYPOTHÈSE PROBLÈME PLAN.
 TD 6 corrigé - PFS Résolution analytique (Loi entrée-sortie statique) Page 1/1 Corrigé Exercice 1 : BRIDE HYDRAULIQUE AVEC HYPOTHÈSE PROBLÈME PLAN. Question : Réaliser le graphe de structure, puis compléter
TD 6 corrigé - PFS Résolution analytique (Loi entrée-sortie statique) Page 1/1 Corrigé Exercice 1 : BRIDE HYDRAULIQUE AVEC HYPOTHÈSE PROBLÈME PLAN. Question : Réaliser le graphe de structure, puis compléter
Correction du Baccalauréat S Amérique du Nord mai 2007
 Correction du Baccalauréat S Amérique du Nord mai 7 EXERCICE points. Le plan (P) a une pour équation cartésienne : x+y z+ =. Les coordonnées de H vérifient cette équation donc H appartient à (P) et A n
Correction du Baccalauréat S Amérique du Nord mai 7 EXERCICE points. Le plan (P) a une pour équation cartésienne : x+y z+ =. Les coordonnées de H vérifient cette équation donc H appartient à (P) et A n
1 radian. De même, la longueur d un arc de cercle de rayon R et dont l angle au centre a pour mesure α radians est α R. R AB =R.
 Angles orientés Trigonométrie I. Préliminaires. Le radian Définition B R AB =R C O radian R A Soit C un cercle de centre O. Dire que l angle géométrique AOB a pour mesure radian signifie que la longueur
Angles orientés Trigonométrie I. Préliminaires. Le radian Définition B R AB =R C O radian R A Soit C un cercle de centre O. Dire que l angle géométrique AOB a pour mesure radian signifie que la longueur
Items étudiés dans le CHAPITRE N5. 7 et 9 p 129 D14 Déterminer par le calcul l'antécédent d'un nombre par une fonction linéaire
 CHAPITRE N5 FONCTIONS LINEAIRES NOTION DE FONCTION FONCTIONS LINEAIRES NOTION DE FONCTION FONCTIONS LINEAIRES NOTION DE FONCTION Code item D0 D2 N30[S] Items étudiés dans le CHAPITRE N5 Déterminer l'image
CHAPITRE N5 FONCTIONS LINEAIRES NOTION DE FONCTION FONCTIONS LINEAIRES NOTION DE FONCTION FONCTIONS LINEAIRES NOTION DE FONCTION Code item D0 D2 N30[S] Items étudiés dans le CHAPITRE N5 Déterminer l'image
TP 7 : oscillateur de torsion
 TP 7 : oscillateur de torsion Objectif : étude des oscillations libres et forcées d un pendule de torsion 1 Principe général 1.1 Définition Un pendule de torsion est constitué par un fil large (métallique)
TP 7 : oscillateur de torsion Objectif : étude des oscillations libres et forcées d un pendule de torsion 1 Principe général 1.1 Définition Un pendule de torsion est constitué par un fil large (métallique)
Chapitre 6. Fonction réelle d une variable réelle
 Chapitre 6 Fonction réelle d une variable réelle 6. Généralités et plan d étude Une application de I dans R est une correspondance entre les éléments de I et ceu de R telle que tout élément de I admette
Chapitre 6 Fonction réelle d une variable réelle 6. Généralités et plan d étude Une application de I dans R est une correspondance entre les éléments de I et ceu de R telle que tout élément de I admette
DYNAMIQUE DE FORMATION DES ÉTOILES
 A 99 PHYS. II ÉCOLE NATIONALE DES PONTS ET CHAUSSÉES, ÉCOLES NATIONALES SUPÉRIEURES DE L'AÉRONAUTIQUE ET DE L'ESPACE, DE TECHNIQUES AVANCÉES, DES TÉLÉCOMMUNICATIONS, DES MINES DE PARIS, DES MINES DE SAINT-ÉTIENNE,
A 99 PHYS. II ÉCOLE NATIONALE DES PONTS ET CHAUSSÉES, ÉCOLES NATIONALES SUPÉRIEURES DE L'AÉRONAUTIQUE ET DE L'ESPACE, DE TECHNIQUES AVANCÉES, DES TÉLÉCOMMUNICATIONS, DES MINES DE PARIS, DES MINES DE SAINT-ÉTIENNE,
Enoncé et corrigé du brevet des collèges dans les académies d Aix- Marseille, Montpellier, Nice Corse et Toulouse en 2000. Énoncé.
 Enoncé et corrigé du brevet des collèges dans les académies d Aix- Marseille, Montpellier, Nice Corse et Toulouse en 2000. Énoncé. I- ACTIVITES NUMERIQUES (12 points) Exercice 1 (3 points) On considère
Enoncé et corrigé du brevet des collèges dans les académies d Aix- Marseille, Montpellier, Nice Corse et Toulouse en 2000. Énoncé. I- ACTIVITES NUMERIQUES (12 points) Exercice 1 (3 points) On considère
Fonctions de deux variables. Mai 2011
 Fonctions de deux variables Dédou Mai 2011 D une à deux variables Les fonctions modèlisent de l information dépendant d un paramètre. On a aussi besoin de modéliser de l information dépendant de plusieurs
Fonctions de deux variables Dédou Mai 2011 D une à deux variables Les fonctions modèlisent de l information dépendant d un paramètre. On a aussi besoin de modéliser de l information dépendant de plusieurs
Erratum de MÉCANIQUE, 6ème édition. Introduction Page xxi (milieu de page) G = 6, 672 59 10 11 m 3 kg 1 s 2
 G = 6, 672 59 10 11 m 3 kg 1 s 2") Introduction Page xxi (milieu de page) G = 6, 672 59 1 11 m 3 kg 1 s 2 Erratum de MÉCANIQUE, 6ème édition Page xxv (dernier tiers de page) le terme de Coriolis est supérieur à 1% du poids) Chapitre 1 Page
Introduction Page xxi (milieu de page) G = 6, 672 59 1 11 m 3 kg 1 s 2 Erratum de MÉCANIQUE, 6ème édition Page xxv (dernier tiers de page) le terme de Coriolis est supérieur à 1% du poids) Chapitre 1 Page
Exercices - Nombres complexes : corrigé. Formes algébriques et trigonométriques, module et argument
 Formes algébriques et trigonométriques, module et argument Exercice - - L/Math Sup - On multiplie le dénominateur par sa quantité conjuguée, et on obtient : Z = 4 i 3 + i 3 i 3 = 4 i 3 + 3 = + i 3. Pour
Formes algébriques et trigonométriques, module et argument Exercice - - L/Math Sup - On multiplie le dénominateur par sa quantité conjuguée, et on obtient : Z = 4 i 3 + i 3 i 3 = 4 i 3 + 3 = + i 3. Pour
Cours de Systèmes Asservis
 Cours de Systèmes Asservis J.Baillou, J.P.Chemla, B. Gasnier, M.Lethiecq Polytech Tours 2 Chapitre 1 Introduction 1.1 Définition de l automatique Automatique : Qui fonctionne tout seul ou sans intervention
Cours de Systèmes Asservis J.Baillou, J.P.Chemla, B. Gasnier, M.Lethiecq Polytech Tours 2 Chapitre 1 Introduction 1.1 Définition de l automatique Automatique : Qui fonctionne tout seul ou sans intervention
Chapitre 2 Le problème de l unicité des solutions
 Université Joseph Fourier UE MAT 127 Mathématiques année 2011-2012 Chapitre 2 Le problème de l unicité des solutions Ce que nous verrons dans ce chapitre : un exemple d équation différentielle y = f(y)
Université Joseph Fourier UE MAT 127 Mathématiques année 2011-2012 Chapitre 2 Le problème de l unicité des solutions Ce que nous verrons dans ce chapitre : un exemple d équation différentielle y = f(y)
3 Approximation de solutions d équations
 3 Approximation de solutions d équations Une équation scalaire a la forme générale f(x) =0où f est une fonction de IR dans IR. Un système de n équations à n inconnues peut aussi se mettre sous une telle
3 Approximation de solutions d équations Une équation scalaire a la forme générale f(x) =0où f est une fonction de IR dans IR. Un système de n équations à n inconnues peut aussi se mettre sous une telle
Information. BASES LITTERAIRES Etre capable de répondre à une question du type «la valeur trouvée respecte t-elle le cahier des charges?
 Compétences générales Avoir des piles neuves, ou récentes dans sa machine à calculer. Etre capable de retrouver instantanément une info dans sa machine. Prendre une bouteille d eau. Prendre CNI + convocation.
Compétences générales Avoir des piles neuves, ou récentes dans sa machine à calculer. Etre capable de retrouver instantanément une info dans sa machine. Prendre une bouteille d eau. Prendre CNI + convocation.
Correction du baccalauréat S Liban juin 2007
 Correction du baccalauréat S Liban juin 07 Exercice. a. Signe de lnx lnx) : on fait un tableau de signes : x 0 e + ln x 0 + + lnx + + 0 lnx lnx) 0 + 0 b. On afx) gx) lnx lnx) lnx lnx). On déduit du tableau
Correction du baccalauréat S Liban juin 07 Exercice. a. Signe de lnx lnx) : on fait un tableau de signes : x 0 e + ln x 0 + + lnx + + 0 lnx lnx) 0 + 0 b. On afx) gx) lnx lnx) lnx lnx). On déduit du tableau
La fonction exponentielle
 DERNIÈRE IMPRESSION LE 2 novembre 204 à :07 La fonction exponentielle Table des matières La fonction exponentielle 2. Définition et théorèmes.......................... 2.2 Approche graphique de la fonction
DERNIÈRE IMPRESSION LE 2 novembre 204 à :07 La fonction exponentielle Table des matières La fonction exponentielle 2. Définition et théorèmes.......................... 2.2 Approche graphique de la fonction
Problèmes sur le chapitre 5
 Problèmes sur le chapitre 5 (Version du 13 janvier 2015 (10h38)) 501 Le calcul des réactions d appui dans les problèmes schématisés ci-dessous est-il possible par les équations de la statique Si oui, écrire
Problèmes sur le chapitre 5 (Version du 13 janvier 2015 (10h38)) 501 Le calcul des réactions d appui dans les problèmes schématisés ci-dessous est-il possible par les équations de la statique Si oui, écrire
Système formé de deux points
 MPSI - 2005/2006 - Mécanique II - Système formé de deux points matériels page /5 Système formé de deux points matériels Table des matières Éléments cinétiques. Éléments cinétiques dans R.......................2
MPSI - 2005/2006 - Mécanique II - Système formé de deux points matériels page /5 Système formé de deux points matériels Table des matières Éléments cinétiques. Éléments cinétiques dans R.......................2
Michel Henry Nicolas Delorme
 Michel Henry Nicolas Delorme Mécanique du point Cours + Exos Michel Henry Maître de conférences à l IUFM des Pays de Loire (Le Mans) Agrégé de physique Nicolas Delorme Maître de conférences à l université
Michel Henry Nicolas Delorme Mécanique du point Cours + Exos Michel Henry Maître de conférences à l IUFM des Pays de Loire (Le Mans) Agrégé de physique Nicolas Delorme Maître de conférences à l université
Cinétique et dynamique des systèmes de solides
 Cinétique et dynamique des systèmes de solides Page 2/30 CINÉTIQUE des systèmes matériels... 3 1.) Notion de masse...3 2.) Centre de masse d'un ensemble matériel...4 3.) Torseurs cinétique et dynamique...6
Cinétique et dynamique des systèmes de solides Page 2/30 CINÉTIQUE des systèmes matériels... 3 1.) Notion de masse...3 2.) Centre de masse d'un ensemble matériel...4 3.) Torseurs cinétique et dynamique...6
LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE
 LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE 2. L EFFET GYROSCOPIQUE Les lois physiques qui régissent le mouvement des véhicules terrestres sont des lois universelles qui s appliquent
LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE 2. L EFFET GYROSCOPIQUE Les lois physiques qui régissent le mouvement des véhicules terrestres sont des lois universelles qui s appliquent
AC AB. A B C x 1. x + 1. d où. Avec un calcul vu au lycée, on démontre que cette solution admet deux solutions dont une seule nous intéresse : x =
 LE NOMBRE D OR Présentation et calcul du nombre d or Euclide avait trouvé un moyen de partager en deu un segment selon en «etrême et moyenne raison» Soit un segment [AB]. Le partage d Euclide consiste
LE NOMBRE D OR Présentation et calcul du nombre d or Euclide avait trouvé un moyen de partager en deu un segment selon en «etrême et moyenne raison» Soit un segment [AB]. Le partage d Euclide consiste
INTRODUCTION. A- Modélisation et paramétrage : CHAPITRE I : MODÉLISATION. I. Paramétrage de la position d un solide : (S1) O O1 X
 O O1 X") INTRODUCTION La conception d'un mécanisme en vue de sa réalisation industrielle comporte plusieurs étapes. Avant d'aboutir à la maquette numérique du produit définitif, il est nécessaire d'effectuer une
INTRODUCTION La conception d'un mécanisme en vue de sa réalisation industrielle comporte plusieurs étapes. Avant d'aboutir à la maquette numérique du produit définitif, il est nécessaire d'effectuer une
Exprimer ce coefficient de proportionnalité sous forme de pourcentage : 3,5 %
 23 CALCUL DE L INTÉRÊT Tau d intérêt Paul et Rémi ont reçu pour Noël, respectivement, 20 et 80. Ils placent cet argent dans une banque, au même tau. Au bout d une année, ce placement leur rapportera une
23 CALCUL DE L INTÉRÊT Tau d intérêt Paul et Rémi ont reçu pour Noël, respectivement, 20 et 80. Ils placent cet argent dans une banque, au même tau. Au bout d une année, ce placement leur rapportera une
Analyse des Systèmes Asservis
 Analyse des Systèmes Asservis Après quelques rappels, nous verrons comment évaluer deux des caractéristiques principales d'un système asservi : Stabilité et Précision. Si ces caractéristiques ne sont pas
Analyse des Systèmes Asservis Après quelques rappels, nous verrons comment évaluer deux des caractéristiques principales d'un système asservi : Stabilité et Précision. Si ces caractéristiques ne sont pas
Corrigé du baccalauréat S Asie 21 juin 2010
 Corrigé du baccalauréat S Asie juin 00 EXERCICE Commun à tous les candidats 4 points. Question : Le triangle GBI est : Réponse a : isocèle. Réponse b : équilatéral. Réponse c : rectangle. On a GB = + =
Corrigé du baccalauréat S Asie juin 00 EXERCICE Commun à tous les candidats 4 points. Question : Le triangle GBI est : Réponse a : isocèle. Réponse b : équilatéral. Réponse c : rectangle. On a GB = + =
Etude du SIMULATEUR DE VOL «FLY-HO»
 ECOLE NATIONALE DE L AVIATION CIVILE Session 212 CONCOURS DE RECRUTEMENT D ELEVES INGENIEURS DU CONTROLE DE LA NAVIGATION AERIENNE Epreuve optionnelle obligatoire de SCIENCES INDUSTRIELLES POUR L INGENIEUR
ECOLE NATIONALE DE L AVIATION CIVILE Session 212 CONCOURS DE RECRUTEMENT D ELEVES INGENIEURS DU CONTROLE DE LA NAVIGATION AERIENNE Epreuve optionnelle obligatoire de SCIENCES INDUSTRIELLES POUR L INGENIEUR
Chapitre 2 : Caractéristiques du mouvement d un solide
 Chapitre 2 : Caractéristiques du mouvement d un solide I Rappels : Référentiel : Le mouvement d un corps est décris par rapport à un corps de référence et dépend du choix de ce corps. Ce corps de référence
Chapitre 2 : Caractéristiques du mouvement d un solide I Rappels : Référentiel : Le mouvement d un corps est décris par rapport à un corps de référence et dépend du choix de ce corps. Ce corps de référence
Premier ordre Expression de la fonction de transfert : H(p) = K
 = K") Premier ordre Expression de la fonction de transfert : H(p) = K + τ.p. K.e τ K.e /τ τ 86% 95% 63% 5% τ τ 3τ 4τ 5τ Temps Caractéristiques remarquables de la réponse à un échelon e(t) = e.u(t). La valeur
Premier ordre Expression de la fonction de transfert : H(p) = K + τ.p. K.e τ K.e /τ τ 86% 95% 63% 5% τ τ 3τ 4τ 5τ Temps Caractéristiques remarquables de la réponse à un échelon e(t) = e.u(t). La valeur
Statique des systèmes de solides. 1 Deux exemples d illustration 2 1.1 Système de freinage du TGV 1... 2 1.2 Micro-compresseur...
 Statique des systèmes de solides Table des matières 1 Deux exemples d illustration 2 1.1 Système de freinage du TGV 1............................ 2 1.2 Micro-compresseur..................................
Statique des systèmes de solides Table des matières 1 Deux exemples d illustration 2 1.1 Système de freinage du TGV 1............................ 2 1.2 Micro-compresseur..................................
Correction de l examen de la première session
 de l examen de la première session Julian Tugaut, Franck Licini, Didier Vincent Si vous trouvez des erreurs de Français ou de mathématiques ou bien si vous avez des questions et/ou des suggestions, envoyez-moi
de l examen de la première session Julian Tugaut, Franck Licini, Didier Vincent Si vous trouvez des erreurs de Français ou de mathématiques ou bien si vous avez des questions et/ou des suggestions, envoyez-moi
DISQUE DUR. Figure 1 Disque dur ouvert
 DISQUE DUR Le sujet est composé de 8 pages et d une feuille format A3 de dessins de détails, la réponse à toutes les questions sera rédigée sur les feuilles de réponses jointes au sujet. Toutes les questions
DISQUE DUR Le sujet est composé de 8 pages et d une feuille format A3 de dessins de détails, la réponse à toutes les questions sera rédigée sur les feuilles de réponses jointes au sujet. Toutes les questions
Erreur statique. Chapitre 6. 6.1 Définition
 Chapitre 6 Erreur statique On considère ici le troisième paramètre de design, soit l erreur statique. L erreur statique est la différence entre l entrée et la sortie d un système lorsque t pour une entrée
Chapitre 6 Erreur statique On considère ici le troisième paramètre de design, soit l erreur statique. L erreur statique est la différence entre l entrée et la sortie d un système lorsque t pour une entrée
Géométrie dans l espace Produit scalaire et équations
 Chapitre 11. 2ème partie Géométrie dans l espace Produit scalaire et équations Terminale S Ce que dit le programme : CONTENUS CAPACITÉS ATTENDUES COMMENTAIRES 2ème partie Produit scalaire Produit scalaire
Chapitre 11. 2ème partie Géométrie dans l espace Produit scalaire et équations Terminale S Ce que dit le programme : CONTENUS CAPACITÉS ATTENDUES COMMENTAIRES 2ème partie Produit scalaire Produit scalaire
Si deux droites sont parallèles à une même troisième. alors les deux droites sont parallèles entre elles. alors
 N I) Pour démontrer que deux droites (ou segments) sont parallèles (d) // (d ) (d) // (d ) deux droites sont parallèles à une même troisième les deux droites sont parallèles entre elles (d) // (d) deux
N I) Pour démontrer que deux droites (ou segments) sont parallèles (d) // (d ) (d) // (d ) deux droites sont parallèles à une même troisième les deux droites sont parallèles entre elles (d) // (d) deux
Repérage d un point - Vitesse et
 PSI - écanique I - Repérage d un point - Vitesse et accélération page 1/6 Repérage d un point - Vitesse et accélération Table des matières 1 Espace et temps - Référentiel d observation 1 2 Coordonnées
PSI - écanique I - Repérage d un point - Vitesse et accélération page 1/6 Repérage d un point - Vitesse et accélération Table des matières 1 Espace et temps - Référentiel d observation 1 2 Coordonnées
Calcul matriciel. Définition 1 Une matrice de format (m,n) est un tableau rectangulaire de mn éléments, rangés en m lignes et n colonnes.
 est un tableau rectangulaire de mn éléments, rangés en m lignes et n colonnes.") 1 Définitions, notations Calcul matriciel Définition 1 Une matrice de format (m,n) est un tableau rectangulaire de mn éléments, rangés en m lignes et n colonnes. On utilise aussi la notation m n pour le
1 Définitions, notations Calcul matriciel Définition 1 Une matrice de format (m,n) est un tableau rectangulaire de mn éléments, rangés en m lignes et n colonnes. On utilise aussi la notation m n pour le
LE PRODUIT SCALAIRE ( En première S )
") LE PRODUIT SCALAIRE ( En première S ) Dernière mise à jour : Jeudi 4 Janvier 007 Vincent OBATON, Enseignant au lycée Stendhal de Grenoble ( Année 006-007 ) 1 Table des matières 1 Grille d autoévaluation
LE PRODUIT SCALAIRE ( En première S ) Dernière mise à jour : Jeudi 4 Janvier 007 Vincent OBATON, Enseignant au lycée Stendhal de Grenoble ( Année 006-007 ) 1 Table des matières 1 Grille d autoévaluation
TS Physique Satellite à la recherche de sa planète Exercice résolu
 P a g e 1 Phsique atellite à la recherche de sa planète Exercice résolu Enoncé Le centre spatial de Kourou a lancé le 1 décembre 005, avec une fusée Ariane 5, un satellite de météorologie de seconde génération
P a g e 1 Phsique atellite à la recherche de sa planète Exercice résolu Enoncé Le centre spatial de Kourou a lancé le 1 décembre 005, avec une fusée Ariane 5, un satellite de météorologie de seconde génération
aux différences est appelé équation aux différences d ordre n en forme normale.
 MODÉLISATION ET SIMULATION EQUATIONS AUX DIFFÉRENCES (I/II) 1. Rappels théoriques : résolution d équations aux différences 1.1. Équations aux différences. Définition. Soit x k = x(k) X l état scalaire
MODÉLISATION ET SIMULATION EQUATIONS AUX DIFFÉRENCES (I/II) 1. Rappels théoriques : résolution d équations aux différences 1.1. Équations aux différences. Définition. Soit x k = x(k) X l état scalaire
TUTORIAL 1 ETUDE D UN MODELE SIMPLIFIE DE PORTIQUE PLAN ARTICULE
 TUTORIAL 1 ETUDE D UN MODELE SIMPLIFIE DE PORTIQUE PLAN ARTICULE L'objectif de ce tutorial est de décrire les différentes étapes dans CASTOR Concept / FEM permettant d'effectuer l'analyse statique d'une
TUTORIAL 1 ETUDE D UN MODELE SIMPLIFIE DE PORTIQUE PLAN ARTICULE L'objectif de ce tutorial est de décrire les différentes étapes dans CASTOR Concept / FEM permettant d'effectuer l'analyse statique d'une
Voyez la réponse à cette question dans ce chapitre. www.hometownroofingcontractors.com/blog/9-reasons-diy-rednecks-should-never-fix-their-own-roof
 Une échelle est appuyée sur un mur. S il n y a que la friction statique avec le sol, quel est l angle minimum possible entre le sol et l échelle pour que l échelle ne glisse pas et tombe au sol? www.hometownroofingcontractors.com/blog/9-reasons-diy-rednecks-should-never-fix-their-own-roof
Une échelle est appuyée sur un mur. S il n y a que la friction statique avec le sol, quel est l angle minimum possible entre le sol et l échelle pour que l échelle ne glisse pas et tombe au sol? www.hometownroofingcontractors.com/blog/9-reasons-diy-rednecks-should-never-fix-their-own-roof
Soit la fonction affine qui, pour représentant le nombre de mois écoulés, renvoie la somme économisée.
 ANALYSE 5 points Exercice 1 : Léonie souhaite acheter un lecteur MP3. Le prix affiché (49 ) dépasse largement la somme dont elle dispose. Elle décide donc d économiser régulièrement. Elle a relevé qu elle
ANALYSE 5 points Exercice 1 : Léonie souhaite acheter un lecteur MP3. Le prix affiché (49 ) dépasse largement la somme dont elle dispose. Elle décide donc d économiser régulièrement. Elle a relevé qu elle
Les Conditions aux limites
 Chapitre 5 Les Conditions aux limites Lorsque nous désirons appliquer les équations de base de l EM à des problèmes d exploration géophysique, il est essentiel, pour pouvoir résoudre les équations différentielles,
Chapitre 5 Les Conditions aux limites Lorsque nous désirons appliquer les équations de base de l EM à des problèmes d exploration géophysique, il est essentiel, pour pouvoir résoudre les équations différentielles,
8.1 Généralités sur les fonctions de plusieurs variables réelles. f : R 2 R (x, y) 1 x 2 y 2
 1 x 2 y 2") Chapitre 8 Fonctions de plusieurs variables 8.1 Généralités sur les fonctions de plusieurs variables réelles Définition. Une fonction réelle de n variables réelles est une application d une partie de R
Chapitre 8 Fonctions de plusieurs variables 8.1 Généralités sur les fonctions de plusieurs variables réelles Définition. Une fonction réelle de n variables réelles est une application d une partie de R
TOUT CE QU IL FAUT SAVOIR POUR LE BREVET
 TOUT E QU IL FUT SVOIR POUR LE REVET NUMERIQUE / FONTIONS eci n est qu un rappel de tout ce qu il faut savoir en maths pour le brevet. I- Opérations sur les nombres et les fractions : Les priorités par
TOUT E QU IL FUT SVOIR POUR LE REVET NUMERIQUE / FONTIONS eci n est qu un rappel de tout ce qu il faut savoir en maths pour le brevet. I- Opérations sur les nombres et les fractions : Les priorités par
CONCOURS COMMUN 2010 PHYSIQUE
 CONCOUS COMMUN SUJET A DES ÉCOLES DES MINES D ALBI, ALÈS, DOUAI, NANTES Épreuve de Physique-Chimie (toutes filières) Corrigé Barème total points : Physique points - Chimie 68 points PHYSIQUE Partie A :
CONCOUS COMMUN SUJET A DES ÉCOLES DES MINES D ALBI, ALÈS, DOUAI, NANTES Épreuve de Physique-Chimie (toutes filières) Corrigé Barème total points : Physique points - Chimie 68 points PHYSIQUE Partie A :
Sujet proposé par Yves M. LEROY. Cet examen se compose d un exercice et de deux problèmes. Ces trois parties sont indépendantes.
 Promotion X 004 COURS D ANALYSE DES STRUCTURES MÉCANIQUES PAR LA MÉTHODE DES ELEMENTS FINIS (MEC 568) contrôle non classant (7 mars 007, heures) Documents autorisés : polycopié ; documents et notes de
Promotion X 004 COURS D ANALYSE DES STRUCTURES MÉCANIQUES PAR LA MÉTHODE DES ELEMENTS FINIS (MEC 568) contrôle non classant (7 mars 007, heures) Documents autorisés : polycopié ; documents et notes de
Logique binaire. Aujourd'hui, l'algèbre de Boole trouve de nombreuses applications en informatique et dans la conception des circuits électroniques.
 Logique binaire I. L'algèbre de Boole L'algèbre de Boole est la partie des mathématiques, de la logique et de l'électronique qui s'intéresse aux opérations et aux fonctions sur les variables logiques.
Logique binaire I. L'algèbre de Boole L'algèbre de Boole est la partie des mathématiques, de la logique et de l'électronique qui s'intéresse aux opérations et aux fonctions sur les variables logiques.
Figure 1 : représentation des différents écarts
 ulletin officiel spécial n 9 du 30 septembre 2010 Annexe SIENES DE L INGÉNIEUR YLE TERMINAL DE LA SÉRIE SIENTIFIQUE I - Objectifs généraux Notre société devra relever de nombreux défis dans les prochaines
ulletin officiel spécial n 9 du 30 septembre 2010 Annexe SIENES DE L INGÉNIEUR YLE TERMINAL DE LA SÉRIE SIENTIFIQUE I - Objectifs généraux Notre société devra relever de nombreux défis dans les prochaines
Précision d un résultat et calculs d incertitudes
 Précision d un résultat et calculs d incertitudes PSI* 2012-2013 Lycée Chaptal 3 Table des matières Table des matières 1. Présentation d un résultat numérique................................ 4 1.1 Notations.........................................................
Précision d un résultat et calculs d incertitudes PSI* 2012-2013 Lycée Chaptal 3 Table des matières Table des matières 1. Présentation d un résultat numérique................................ 4 1.1 Notations.........................................................
TD1 Signaux, énergie et puissance, signaux aléatoires
 TD1 Signaux, énergie et puissance, signaux aléatoires I ) Ecrire l'expression analytique des signaux représentés sur les figures suivantes à l'aide de signaux particuliers. Dans le cas du signal y(t) trouver
TD1 Signaux, énergie et puissance, signaux aléatoires I ) Ecrire l'expression analytique des signaux représentés sur les figures suivantes à l'aide de signaux particuliers. Dans le cas du signal y(t) trouver
Module d Electricité. 2 ème partie : Electrostatique. Fabrice Sincère (version 3.0.1) http://pagesperso-orange.fr/fabrice.sincere
 http://pagesperso-orange.fr/fabrice.sincere") Module d Electricité 2 ème partie : Electrostatique Fabrice Sincère (version 3.0.1) http://pagesperso-orange.fr/fabrice.sincere 1 Introduction Principaux constituants de la matière : - protons : charge
Module d Electricité 2 ème partie : Electrostatique Fabrice Sincère (version 3.0.1) http://pagesperso-orange.fr/fabrice.sincere 1 Introduction Principaux constituants de la matière : - protons : charge
Baccalauréat S Nombres complexes Index des exercices sur les complexes de septembre 1999 à juin 2012 Tapuscrit : DENIS VERGÈS
 Baccalauréat S Nombres complexes Index des exercices sur les complexes de septembre 1999 à juin 2012 Tapuscrit : DENIS VERGÈS N o Lieu et date Q.C.M. Algébrique Géométrie 1 Asie juin 2012 2 Métropole juin
Baccalauréat S Nombres complexes Index des exercices sur les complexes de septembre 1999 à juin 2012 Tapuscrit : DENIS VERGÈS N o Lieu et date Q.C.M. Algébrique Géométrie 1 Asie juin 2012 2 Métropole juin
Limites finies en un point
 8 Limites finies en un point Pour ce chapitre, sauf précision contraire, I désigne une partie non vide de R et f une fonction définie sur I et à valeurs réelles ou complees. Là encore, les fonctions usuelles,
8 Limites finies en un point Pour ce chapitre, sauf précision contraire, I désigne une partie non vide de R et f une fonction définie sur I et à valeurs réelles ou complees. Là encore, les fonctions usuelles,
Angles orientés et fonctions circulaires ( En première S )
") Angles orientés et fonctions circulaires ( En première S ) Dernière mise à jour : Jeudi 01 Septembre 010 Vincent OBATON, Enseignant au lycée Stendhal de Grenoble (Année 006-007) Lycée Stendhal, Grenoble
Angles orientés et fonctions circulaires ( En première S ) Dernière mise à jour : Jeudi 01 Septembre 010 Vincent OBATON, Enseignant au lycée Stendhal de Grenoble (Année 006-007) Lycée Stendhal, Grenoble
Cours Fonctions de deux variables
 Cours Fonctions de deux variables par Pierre Veuillez 1 Support théorique 1.1 Représentation Plan et espace : Grâce à un repère cartésien ( ) O, i, j du plan, les couples (x, y) de R 2 peuvent être représenté
Cours Fonctions de deux variables par Pierre Veuillez 1 Support théorique 1.1 Représentation Plan et espace : Grâce à un repère cartésien ( ) O, i, j du plan, les couples (x, y) de R 2 peuvent être représenté
Fonctions de plusieurs variables
 Maths MP Exercices Fonctions de plusieurs variables Les indications ne sont ici que pour être consultées après le T (pour les exercices non traités). Avant et pendant le T, tenez bon et n allez pas les
Maths MP Exercices Fonctions de plusieurs variables Les indications ne sont ici que pour être consultées après le T (pour les exercices non traités). Avant et pendant le T, tenez bon et n allez pas les
Exercices - Fonctions de plusieurs variables : corrigé. Pour commencer
 Pour commencer Exercice 1 - Ensembles de définition - Première année - 1. Le logarithme est défini si x + y > 0. On trouve donc le demi-plan supérieur délimité par la droite d équation x + y = 0.. 1 xy
Pour commencer Exercice 1 - Ensembles de définition - Première année - 1. Le logarithme est défini si x + y > 0. On trouve donc le demi-plan supérieur délimité par la droite d équation x + y = 0.. 1 xy
Plan du cours : électricité 1
 Semestre : S2 Module Physique II 1 Electricité 1 2 Optique géométrique Plan du cours : électricité 1 Partie A : Electrostatique (discipline de l étude des phénomènes liés aux distributions de charges stationnaires)
Semestre : S2 Module Physique II 1 Electricité 1 2 Optique géométrique Plan du cours : électricité 1 Partie A : Electrostatique (discipline de l étude des phénomènes liés aux distributions de charges stationnaires)
DM n o 8 TS1 2012 Physique 10 (satellites) + Chimie 12 (catalyse) Exercice 1 Lancement d un satellite météorologique
 + Chimie 12 (catalyse) Exercice 1 Lancement d un satellite météorologique") DM n o 8 TS1 2012 Physique 10 (satellites) + Chimie 12 (catalyse) Exercice 1 Lancement d un satellite météorologique Le centre spatial de Kourou a lancé le 21 décembre 200, avec une fusée Ariane, un satellite
DM n o 8 TS1 2012 Physique 10 (satellites) + Chimie 12 (catalyse) Exercice 1 Lancement d un satellite météorologique Le centre spatial de Kourou a lancé le 21 décembre 200, avec une fusée Ariane, un satellite
Rappels et compléments, première partie : Nombres complexes et applications à la géométrie
 Rappels et compléments, première partie : Nombres complexes et applications à la géométrie 1 Définition des nombres complexes On définit sur les couples de réels une loi d addition comme suit : (x; y)
Rappels et compléments, première partie : Nombres complexes et applications à la géométrie 1 Définition des nombres complexes On définit sur les couples de réels une loi d addition comme suit : (x; y)
MOTO ELECTRIQUE. CPGE / Sciences Industrielles pour l Ingénieur TD06_08 Moto électrique DIAGRAMME DES INTER-ACTEURS UTILISATEUR ENVIRONNEMENT HUMAIN
 MOTO ELECTRIQUE MISE EN SITUATION La moto électrique STRADA EVO 1 est fabriquée par une société SUISSE, située à LUGANO. Moyen de transport alternatif, peut-être la solution pour concilier contraintes
MOTO ELECTRIQUE MISE EN SITUATION La moto électrique STRADA EVO 1 est fabriquée par une société SUISSE, située à LUGANO. Moyen de transport alternatif, peut-être la solution pour concilier contraintes
Q6 : Comment calcule t-on l intensité sonore à partir du niveau d intensité?
 EXERCICE 1 : QUESTION DE COURS Q1 : Qu est ce qu une onde progressive? Q2 : Qu est ce qu une onde mécanique? Q3 : Qu elle est la condition pour qu une onde soit diffractée? Q4 : Quelles sont les différentes
EXERCICE 1 : QUESTION DE COURS Q1 : Qu est ce qu une onde progressive? Q2 : Qu est ce qu une onde mécanique? Q3 : Qu elle est la condition pour qu une onde soit diffractée? Q4 : Quelles sont les différentes
PRECISION - REJET DE PERTURBATIONS T.D. G.E.I.I.
 PRECISION - REJET DE PERTURBATIONS T.D. G.E.I.I.. Donner les erreurs en position, en vitesse et en accélération d un système de transfert F BO = N(p) D(p) (transfert en boucle ouverte) bouclé par retour
PRECISION - REJET DE PERTURBATIONS T.D. G.E.I.I.. Donner les erreurs en position, en vitesse et en accélération d un système de transfert F BO = N(p) D(p) (transfert en boucle ouverte) bouclé par retour
TSTI 2D CH X : Exemples de lois à densité 1
 TSTI 2D CH X : Exemples de lois à densité I Loi uniforme sur ab ; ) Introduction Dans cette activité, on s intéresse à la modélisation du tirage au hasard d un nombre réel de l intervalle [0 ;], chacun
TSTI 2D CH X : Exemples de lois à densité I Loi uniforme sur ab ; ) Introduction Dans cette activité, on s intéresse à la modélisation du tirage au hasard d un nombre réel de l intervalle [0 ;], chacun
I Stabilité, Commandabilité et Observabilité 11. 1 Introduction 13 1.1 Un exemple emprunté à la robotique... 13 1.2 Le plan... 18 1.3 Problème...
 TABLE DES MATIÈRES 5 Table des matières I Stabilité, Commandabilité et Observabilité 11 1 Introduction 13 1.1 Un exemple emprunté à la robotique................... 13 1.2 Le plan...................................
TABLE DES MATIÈRES 5 Table des matières I Stabilité, Commandabilité et Observabilité 11 1 Introduction 13 1.1 Un exemple emprunté à la robotique................... 13 1.2 Le plan...................................
Dérivation : cours. Dérivation dans R
 TS Dérivation dans R Dans tout le capitre, f désigne une fonction définie sur un intervalle I de R (non vide et non réduit à un élément) et à valeurs dans R. Petits rappels de première Téorème-définition
TS Dérivation dans R Dans tout le capitre, f désigne une fonction définie sur un intervalle I de R (non vide et non réduit à un élément) et à valeurs dans R. Petits rappels de première Téorème-définition
Notions d asservissements et de Régulations
 I. Introduction I. Notions d asservissements et de Régulations Le professeur de Génie Electrique doit faire passer des notions de régulation à travers ses enseignements. Les notions principales qu'il a
I. Introduction I. Notions d asservissements et de Régulations Le professeur de Génie Electrique doit faire passer des notions de régulation à travers ses enseignements. Les notions principales qu'il a
Épreuve E5 : Conception détaillée. Sous-épreuve E51 : Conception détaillée d une chaîne fonctionnelle
 BTS Conception et Réalisation de Systèmes Automatiques Épreuve E5 : Conception détaillée Sous-épreuve E51 : Conception détaillée d une chaîne fonctionnelle Session 2013 Durée : 4 h Coefficient : 3 Matériel
BTS Conception et Réalisation de Systèmes Automatiques Épreuve E5 : Conception détaillée Sous-épreuve E51 : Conception détaillée d une chaîne fonctionnelle Session 2013 Durée : 4 h Coefficient : 3 Matériel