Aide à la conception par simulation de systèmes de cartographie mobile à scanner laser
|
|
|
- Flavie Lussier
- il y a 6 ans
- Total affichages :
Transcription
1 Aide à la conception par simulation de systèmes de cartographie mobile à scanner laser Hyun-Jae YOO 1, François GOULETTE 1, Joël SENPAUROCA 1, Grégory LEPERE 2 et Dominique GRUYER 3 1. Mines ParisTech CAOR-Centre de Robotique Mathématiques et Systèmes 60, Bd St Michel Paris Cedex 06 prenom.nom@mines-paristech.fr 2. Mensi Trimble 3. LIVIC (INRETS/LCPC) 30, Rue de la Fontaine du Bâtiment 824 Vaisseau 14, Route de la Minière Fontenay sous Bois Versailles prenom_nom@trimble.com prenom.nom@inrets.fr Résumé Depuis une dizaine d années, les systèmes de cartographie mobile terrestre se développent pour réaliser la numérisation des environnements urbains. Ces systèmes dynamiques nous permettent d économiser du temps lors de l acquisition des données par rapport aux systèmes fixes. Pour que les données acquises soient utiles, on souhaite conserver la même qualité qu avec les systèmes fixes. Pour cela, il est nécessaire de concevoir le système de perception en résolvant les problématiques de complétude, d homogénéité, etc. Nous présentons dans cet article une démarche de conception et un simulateur permettant gagner du temps et d économiser le coût de conception et de réalisation de prototypes matériels. Nous montrons une illustration de cette démarche sur des exemples de simulation. Mots clés: simulation, systèmes de cartographie mobile, scanner laser Abstract Over the past decade, terrestrial mobile mapping systems have been developing for the digitizing of urban environments. These dynamic systems make possible to save acquisition time compared to static systems. However, in order to get useful data, the quality of the data must be as good as the quality obtained with fixed systems. Hence, it is necessary to design the system, resolving such issues as completeness, homogeneity, etc. We present in this article, a design approach and a simulator which permits to gain time and cost before prototyping. We show an illustration of this approach with examples of simulation. Keywords: simulation, mobile mapping systems, laser scanner 1. Introduction Depuis une dizaine d années, les systèmes de cartographie mobiles se développent en terrestre pour réaliser la numérisation des environnements urbains. Le principe de ces systèmes est d embarquer plusieurs capteurs sur un véhicule et de percevoir l environnement quand le véhicule se déplace. L intérêt de ces systèmes dynamiques, par rapport aux systèmes statiques, est de diminuer le temps d acquisition des données. Ces systèmes offrent aussi des possibilités originales et cela crée, de fait, un nouveau domaine d activité. La conception d un scanner correspond à la prise en compte des besoins spécifiques à ces nouvelles applications. D ailleurs, la dynamique du système induit quelques problématiques liées soit à la localisation, soit aux moyens de perception. Pour que les données acquises par le système de cartographie mobile soient utiles, il est nécessaire de concevoir le système de perception de façon spécifique. L Ecole des Mines de Paris (Mines ParisTech) possède un véhicule, LARA-3D, qui utilise plusieurs capteurs : GPS, INS, scanner laser, caméra, etc. Il permet de réaliser des études prospectives et nous aide dans le développement de nouveaux concepts relatifs aux systèmes de cartographie [ABU 05, GOU 06, BRU 07]. Pour que les systèmes de cartographie mobile répondent bien aux applications, il est nécessaire de concevoir le système général. L utilisation de la simulation nous permet de réduire le temps de conception et de contrôler la qualité des données qui pourront être fournies par le système. Dans ce papier, nous montrons essentiellement les travaux de simulation qui ont été réalisés pour la conception d un système de cartographie mobile de l environnement. L objectif de cette simulation est principalement de définir les caractéristiques d un scanner laser pour la reconstruction de l environnement ainsi que la meilleure configuration sur le véhicule (positionnement des capteurs). Dans la section suivante, nous présentons le domaine des systèmes de cartographie mobile. Ensuite, nous présentons le simulateur et des exemples d application de la simulation. 1


2 2. Relevés laser par systèmes mobiles 2.1. Les relevés laser d environnements Le principe des relevés laser est de mesurer la distance entre l objet et le scanner laser. Les technologies utilisées sont souvent soit le temps de vol, soit la phase différentielle. Avec la distance parcourue par le signal laser, connaissant l angle du miroir de déflexion, on calcule la position de chaque point dans l espace. Pour pouvoir la calculer, il est nécessaire d avoir suffisamment d énergie dans le signal retour du laser. Pour une même puissance laser, l énergie du signal retour peut varier selon les conditions externes (albédo, angle incident, etc.). De fait, la portée maximale est fonction de ces paramètres. Ces relevés laser sont utilisés dans plusieurs domaines d application : la numérisation 3D des environnements urbains, la sécurité routière (profil de la route, distance de visibilité [BRU 06], état des ouvrages d art, etc.), les projets d urbanisme et d infrastructure avec la réalité augmentée, etc. Plusieurs systèmes commerciaux existent sur le marché (GX de Trimble, LMS-Z420i de Riegl, ScanStation2 de Leica, etc. [TRI web, RIE web, LEI web]). Mais il s agit de systèmes fixes ; on positionne le système sur un trépied (station) puis on lance le scan. Ils ont deux rotations (l une horizontale et l autre verticale) qui permettent de numériser l environnement autour de cette station en 3D. Nous avons réalisé une acquisition de données sur la rue Soufflot, Paris 5 ème arrondissement, avec ce type de technique. Les dimensions de cette acquisition sont environ de 140m de longueur et de 30m de hauteur. Pour cette numérisation, nous avons utilisé le scanner laser VX de Trimble qui permet d avoir simultanément le nuage de points et les images en haute résolution (voir Figure 1). Les systèmes de cartographie mobile (en anglais, Mobile Mapping Systems : MMS) sont des systèmes permettant les acquisitions de données numérisées de grandes dimensions. Le système est composé de deux sous-systèmes : un système de localisation du véhicule et un système de perception de l environnement. Selon les capteurs utilisés pour le système de perception, il y a plusieurs catégories de systèmes : images seules (caméra), nuages de points seuls (scanner laser), ou images avec nuages de points (caméra et scanner laser). Il existe différents MMS, prototypes de recherche ou systèmes commerciaux, dans le monde (voir la Table 1). Table 1 : Différents MMS existants [GOU 06, MAN 00, TAL 04, AMO 07, GRA 07, HUN 06] Nom de système LARA-3D VLMS GEOMOBIL DAVIDE MoSES StreetMapper Université/Entreprise Ecole des Mines de Paris Université de Tokyo Institut Cartografic de Catalunya GIOVE 3D Mapping System 3D Laser System LARA-3D est un véhicule (Renault Espace) embarquant un GPS et un INS pour le système de localisation, un scanner laser (IBEO LD) et des caméras pour le système de perception et un ordinateur avec les logiciels adapté et la capacité de stockage de toutes les données. Dans la suite de ce papier, nous ne considérons que la partie «relevés laser» du MMS. Nous avons fait la même acquisition de la rue Soufflot, avec notre système de cartographie mobile, LARA-3D (voir Figure 2). Figure 1 : Acquisition de données avec VX de Trimble Cette acquisition a été faite en six stations pour un côté de la rue (côté impair) et a nécessité, à chaque fois, environ une heure par station (pour la mesure, l installation et la désinstallation). Le temps pour la génération du nuage de points avec un logiciel est négligeable. Ainsi, nous avons pris au total (de la préparation de l acquisition à la génération des nuages de points), environ 6 heures Systèmes de cartographie mobile Figure 2 : Acquisition de données avec LARA-3D Comme le scanner laser utilisé a une fréquence de balayage assez basse (10 Hz), nous avons conduit le véhicule à 9 km/h pour atteindre une résolution comparable à celle obtenue avec des stations fixes. Pour acquérir ce volume de données, nous avons pris environ une minute. Nous avons pris environ 30 minutes de préparation avant et après l acquisition et moins de 10 minutes pour la génération du nuage de points, qui 2
3 pourrait être supprimé lorsque l on génère le nuage de points en temps réel (l un des objectifs de des travaux de recherche autour de LARA-3D). En plus, pendant ce temps, nous avons acquis les deux côtés de la rue. Ainsi, cette manipulation a pris, au total (de la préparation de l acquisition jusqu à la génération du nuage de points), environ 40 minutes. Cette expérience montre clairement qu un MMS est capable de minimiser le temps d acquisition en gardant une bonne qualité de données. Pour ces deux acquisitions dans la rue Soufflot, on a eu besoin d environ une journée d acquisition avec le système fixe, contre moins d une heure avec notre système mobile. Pour que les systèmes mobiles remplacent efficacement les systèmes fixes, il faut assurer au moins la même qualité de données. Dans ce papier, on étudiera le système de perception et principalement l utilisation du scanner laser. Ce capteur nous permettra d obtenir directement l information de profondeur par l intermédiaire d une trame d impacts (nuage de points). Cette trame de données de distance associée avec des informations de géolocalisation du véhicule permettront d obtenir un nuage de points 3D caractérisant l environnement Qualité des données laser Il y a plusieurs problématiques liées à la qualité des données laser : - La résolution, fonction de la vitesse du véhicule et des fréquences de balayage et d impulsions du laser qui doivent être élevées afin d optimiser la résolution (maximum d informations). - La précision, fonction de la qualité des données issues du système de localisation et des caractéristiques du scanner laser. - La complétude (minimisation des zones occultées), qui dépend du système de perception : les configurations spatiales et le nombre de scanners laser utilisés. Les zones occultées peuvent être produites par les véhicules, les arbres ou les piétons. Il y a des zones plus ou moins visibles selon la configuration du système de perception. - L homogénéité du nuage de points : selon la distance des objets à numériser, la densité des points dans la zone peut ne pas être constante (sur-densité si l objet est proche du scanner, sous-densité si l objet est éloigné du scanner). La sous-densité pose un problème de déficit d information sur la scène numérisée, tandis que la surdensité induit éventuellement un problème de stockage de données. Pour le système fixe, il existe un mode intelligent (SureScan du GX advanced de Trimble) qui résout cette problématique [TRI 07]. Ces problématiques posent des questions, pour une application donnée, telles que : Quelle performance de scanner faut-il exiger? Combien de scanners doit-on utiliser? Quelle est la position la mieux adaptée pour chaque scanner sur le véhicule? Etc. De plus, le développement d un nouveau système étant très onéreux et son montage difficile à réaliser et à modifier, il serait beaucoup plus efficace de prototyper un système à partir d une simulation réaliste. Ceci permettrait un gain de temps et d argent et une optimisation du résultat final. 3. Conception aidée par simulation 3.1. Démarche de mise en œuvre d un MMS D un point de vue tout à fait général, pour valider un concept de systèmes de cartographie mobile, nous distinguons six étapes : 1. Concevoir un MMS (types et caractéristiques des capteurs et leurs configurations spatiales sur le véhicule). 2. Réaliser tout le système 3. Acquérir des données 4. Traiter les données et générer le nuage de points 5. Analyser les résultats (qualité des données, etc.) 6. Conclure sur le concept proposé. Dans le cas d un processus de conception classique, on développe un prototype réel (étape 2) et avec celui-ci on acquiert les données dans un environnement réel (étape 3). Par contre, dans le cas d une conception aidée par la simulation, on simule à la fois le comportement du scanner et l acquisition de données dans un environnement virtuel. Ce deuxième cas permet des économies très significatives, en amont de la réalisation d un prototype réel, au niveau de sa conception et de sa mise au point Architecture logicielle LARA-3D Nous souhaitons que notre simulateur s interface parfaitement avec le système de cartographie mobile, LARA-3D [GOU 06]. Figure 3 : Traitement de données LARA-3D et génération du nuage de points La Figure 3 montre le traitement de données implémenté sous RTMaps et la génération du nuage de points. Nous recevons les données du couple GPS - centrale inertielle desquelles on déduit la position, l orientation et vitesse de LARA-3D. Nous recevons aussi les relevés laser (succession de profils de 2D) et construisons le nuage de points. Dans ce papier, nous montrons essentiellement les travaux de simulation qui ont été réalisés pour la conception d un système de cartographie mobile de 3
.")
.")
4 l environnement. L objectif de cette simulation est principalement de définir les caractéristiques d un scanner laser pour ce type d application ainsi que la meilleure configuration sur le véhicule (positionnement) Choix du simulateur SiVIC Pour réaliser cette simulation (véhicule, environnement, capteurs), la plateforme de simulation SiVIC (Simulateur Véhicule, Infrastructure et Capteur) a été retenue [GRU 06, BOU 06, GRU 05]. Cette plateforme est développée au sein du laboratoire LIVIC (INRETS-LCPC). Les raisons de ce choix sont les suivantes : tout d abord, SiVIC est bien adapté à la simulation d acquisitions de capteurs embarqués sur un véhicule terrestre et à la simulation d un environnement. De plus il est possible de transférer les données provenant des capteurs simulés vers RTMaps, un environnement logiciel de prototypage d applications logicielles embarquées utilisé dans le fonctionnement de LARA-3D [BRU 07]. Ceci permet alors de développer les applications de traitement de données avec RTMaps et ensuite de pouvoir les utiliser directement sur un véhicule LARA-3D Présentation de SiVIC continu de données numériques datées et synchronisées sur la même base de temps, issues des caméras, télémètres laser à balayage, GPS, centrale inertielle, etc. Il est alors possible d utiliser ce logiciel pour produire à volonté les données correspondant à des scénarios de conduite choisis, évitant ainsi les difficultés liées à la mobilisation de véhicules réels et au stockage des données. Les objectifs recherchés et les points importants caractérisant les fonctionnalités de la plate-forme SiVIC sont nombreux et divers. Elle permet la simulation de scénarios routiers et peut aussi être utilisée comme simulateur d un modèle physique très réaliste du véhicule pour tester les algorithmes de contrôle/commande. Citons quelques points forts de cette plateforme: Simulation des caméras fournissant un rendu graphique réaliste, Simulation des capteurs télémétriques utilisant un modèle géométrique des véhicules et de leur environnement, Possibilité de mettre facilement en place des scénarios et d interagir sur tous les paramètres de la scène en temps réel, Gestion des conditions climatiques : brouillard, luminosité, pluie, etc. Intégration d un modèle de la commande facilement modifiable, Intégration d un générateur de trajectoire permettant de faire suivre à la voiture une trajectoire imposée (application PathEdit). Modélisation des caractéristiques de la route (texture, adhérences, ) Afin de compléter l ensemble des capteurs embarqués sur les véhicules de SiVIC et ainsi d obtenir une homogénéité avec des prototypes réels, un ensemble de capteurs proprioceptifs sont disponibles. Ceux-ci comprennent des odomètres et des centrales inertielles (accéléromètres et gyromètres sur les 3 axes). De façons à pouvoir gérer trivialement tous les capteurs proprioceptifs et extéroceptifs de SiVIC, un module de gestion de leurs modes de fonctionnement et de leurs bases de temps respectives existe. Figure 4 : SiVIC SiVIC est une plate-forme de prototypage de capteurs virtuels dont le but est de reproduire, de la manière la plus fidèle possible la réalité d une situation dans le paysage urbain, le comportement d un véhicule et le fonctionnement des capteurs qui peuvent y être embarqués (cf. Figure 4). Cette plate-forme propose donc de générer des données homogènes à celles qui peuvent être enregistrées par un système d acquisition de données sur un véhicule d essai réel, à savoir un flux De plus, la plateforme SiVIC est couplée avec le logiciel RTMaps afin de pouvoir générer des séquences de données virtuelles (caméras, télémétrie laser, odométrie, INS ) homogènes avec les données réelles traitées sur un véhicule prototype réel. En effet, avec cette architecture, les algorithmes de perception et de contrôle/commande utilisés sur les véhicules d essais et avec SiVIC sont strictement les mêmes. Ceci est très intéressant dans les phases d évaluation de fonctions d aide à la conduite dans des conditions particulières et sur de très longues durées. De plus, afin de compléter cette fonctionnalité d outil virtuel de référence pour l évaluation des aides à la conduite, un mécanisme de gestion de scénarios dynamiques est disponible. Celui-ci permet de mettre en place une procédure d évaluation complexe et complète en enchaînant de nombreux scénario en boucle, déclenché automatiquement par un module de gestion dynamique d événements (position 4
5 d un objet, distance entre deux objets, intervalle de temps) Données échangées La Figure 5 montre le traitement de données issues de la simulation et la génération du nuage de points. La centrale inertielle de SiVIC fournit les données sans bruit. Nous n avons donc pas besoin d autre capteur de localisation. Le scanner laser produit les données associées aux points obtenus (distance d, angle incident θ, luminance/albédo α). Pour plus de réalisme, les points trop éloignés sont éliminés avant de passer à l étape de génération du nuage de points. Figure 5 : Traitement de données dans le simulateur et génération du nuage de points 4. Mise en œuvre 4.1. Adaptation de SiVIC, module «scanner laser» Le scanner laser dans SiVIC fait l acquisition des données de chaque point de l environnement virtuel. Nous pouvons paramétrer la configuration des scanners laser et les positionner où l on veut sur le véhicule Paramètres du scanner laser Le module scanner laser disponible dans SiVIC offre les mêmes possibilités de paramétrage qu un scanner laser réel. La notion de portée maximale est un paramètre majeur pour la simulation du scanner. On la prédéfinit sous certaines conditions (par exemple, albédo 20%, l angle incident 0 ). On peut aussi définir l angle d ouverture et la fréquence de balayage du scanner. Le paramètre relatif à la résolution angulaire permet de définir, avec la fréquence de balayage, la fréquence d impulsions laser (équation (2)). Fi = Ra A Fb (2) Avec Fi = fréquence d impulsions (Hz), Ra = résolution angulaire (nombre de points / degré), A = angle d ouverture (degré), Fb = fréquence de balayage (Hz) Configuration spatiale du scanner laser sur le véhicule Il est aussi possible de régler la configuration spatiale (position x, y, z et orientation roulis, tangage, lacet) du scanner laser par rapport au centre de véhicule. Ceci nous permet de comparer les différentes configurations spatiales et de trouver la mieux adaptée à nos besoins Données associées aux points Le principe de fonctionnement du scanner laser disponible sur SiVIC est basé soit sur l utilisation du lancer de rayon, soit sur l utilisation du Z-Buffer. Nous avons utilisé cette deuxième possibilité pour des raisons de temps de calcul. Dans cette approche, chaque pixel (point) de l image de profondeur correspond à une information de distance. Comme dans le cas du laser réel, l angle incident et les caractéristiques de l objet (albédo, matériau, etc.) interviennent sur la portée maximale. Dans SiVIC, on associe à chaque couple albédo et angle incident une valeur de la portée maximale. Tout point dont la distance est supérieure à la portée maximale n est pas retenu. Pour ce faire, nous calculons l angle incident et nous considérons la luminosité de l objet comme l albédo. La luminosité de chaque point est calculée à partir de la couleur RGB (équation (1)). 1 L + 2 ( MAX ( R, G, B) MIN ( R, G, B) ) = (1) Avec L = luminosité (%), R = couleur rouge (%), G = couleur verte (%), B = couleur bleu (%). On récupère les informations de distance et de couleur de chaque point en même temps. Lorsque la luminance du point est forte (proche de blanc), on considère que l albédo de ce point est proche de 100% et lorsque la luminance de point est faible (proche de noir), on considère que l albédo est proche de 0%. L angle incident est un angle entre la normale à la surface et la direction de mesure du scanner laser. En revanche, il est difficile de récupérer la normale de chaque point de la surface, c est pourquoi nous avons décidé d utiliser un autre moyen. Comme nous avons l information de profondeur de chaque point (Z-Buffer), en comparant la profondeur du point avec celles des points voisins, on trouve la normale de ce point. Ceci nous permet de simuler et de tester plusieurs types de scanner pour trouver celui qui est le mieux adapté à nos besoins. 5


6 1 2 3 Figure 6 : Calcul de la normale d un point Comme on le voit sur la Figure 6, on calcule d abord la normale à chaque facette triangulaire (à partir d un point et de ses deux voisins). Ensuite on calcule la résultante normale du point, en faisant la somme vectorielle des normales autour de ce point Amélioration du réalisme par le filtrage des points trop éloignés dans RTMaps Comme il a été précisé en , la portée réelle peut varier selon les conditions externes. SiVIC envoie vers RTMaps tous les points dont les distances sont inférieures à la portée prédéfinie ; il est donc nécessaire de filtrer les points trop éloignés dans le cas réel. Le principe de ce filtrage est simple. Si la distance du point est supérieure à la portée réelle, on l élimine. Si ( d > P r ) Point éliminé Avec d = distance du point obtenu (m), P r = Portée réelle (m). Dans notre simulation, nous avons deux conditions externes : l albédo (luminosité) et l angle incident. Les valeurs de ces deux paramètres sont fournies par SiVIC. La portée réelle dans la simulation est fonction de ces deux conditions externes et de la portée prédéfinie dans le paramètre du scanner laser (équation (3)). La réponse angulaire des matériaux est considérée, par souci de simplification, comme Lambertienne. P r = cos θ α α p P Avec P r = portée réelle dans la simulation (m), θ = angle incident (degré), α = luminance (%), α p = luminance pour la portée prédéfinie (%), P p = portée prédéfinie (m). p (3) Figure 7 : Diagramme de RTMaps Comme le montre la Figure 7, il y a sept composants dans le diagramme de RTMaps pour cette application. Le composant n 1 synchronise le temps de SiVIC avec le temps de RTMaps. La centrale inertielle du véhicule dans SiVIC envoie les informations des accélérations en x, y et z et des vitesses angulaires sur trois axes (roulis, tangage et lacet) du véhicule pour une durée donnée vers le composant n 2 de RTMaps. Ensuite ces données sont transmises vers le composant n 3 pour calculer la position et l orientation du véhicule à chaque instant par rapport à la position et à l orientation connues à l instant t0. Le scanner laser dans SiVIC envoie les informations de distance vers le composant n 4 et les informations de l albédo (luminosité) et de l angle incident vers le composant n 5 de RTMaps. Le composant n 6 reçoit les données de composant n 3 (information de position et d orientation de véhicule pour chaque instant) et les données de composant n 4 et n 5 (données associées aux points pour chaque balayage). Dans ce composant, on filtre les points non acceptables et ensuite on calcule la reconstruction du nuage de points. Cette reconstruction est paramétrée par la position et l orientation (inclinaison) du scanner laser qui est monté sur le véhicule. Ensuite, on projette les points retenus après le filtrage dans l espace 3D (voir la Figure 8). Chaque point a une position cartésienne absolue dans l espace. En filtrant les points non acceptables, nous améliorons le réalisme de la simulation Génération du nuage de points simulé et résultat Après avoir filtré les points non acceptables, nous passons à l étape de reconstruction du nuage de points avec les points retenus et l information de position et d orientation du véhicule. Figure 8 : Projection des points dans l espace 3D Le composant n 7 est un visualisateur de nuage de points. 6


7 (2,60m d hauteur et inclinaison à tangage de 20 ). Le véhicule se déplace à vitesse de 50km/h. Les figures montrent la différence de résolution très visiblement. Nous obtenons le nuage de points le plus complet avec le scanner de type Analyse de la précision Cette analyse ne peut pas être faite pour l instant car les capteurs sont sans bruit. Toutefois le simulateur permet de tester les algorithmes de localisation à partir des données inertielles. Figure 9 : Génération du nuage de points en cours de simulation La Figure 9 montre la génération du nuage de points en cours de simulation. Les deux fenêtres en bas sont issues de SiVIC (gauche : fenêtre de commande, droite : fenêtre de visualisation). Les deux fenêtres en haut et derrière proviennent de RTMaps (gauche : visualisation de nuage de points en temps-réel, droite : fenêtre de commande, au fond : diagramme de RTMaps). La Figure 10 montre une première scène virtuelle d environnement urbain. La Figure 11 est le résultat de génération du nuage de points avec les vraies couleurs de la scène de la Figure 10 (informations de couleurs accessibles en chaque point pour le calcul de luminance/albédo. 5. Illustration de la démarche Pour tester le simulateur et mettre en évidence diverses problématiques, nous avons créé une deuxième scène virtuelle de l environnement urbain avec ses bâtiments, des véhicules garés, des arbres et quelques piétons, etc. (cf. Figure 12). Plusieurs nuages de points ont été générés avec différents concepts de systèmes. Les résultats sont présentés sur la Figure 13, la Figure 14 et la Figure 15, en fausses couleurs (correspondant à la luminosité/albédo) et sont expliqués ci-dessous Analyse de la résolution Pour cette analyse, nous avons créé deux types de scanners : l un (type 1) avec un champ d ouverture de 360, une fréquence de balayage de 60Hz, une résolution angulaire de 0,5 et une portée prédéfinie de 80m (Figure 14) et l autre (type 2) qui reproduit les caractéristiques du scanner IBEO LD de LARA-3D, avec un champs d ouverture de 270, une fréquence de balayage de 10Hz, une résolution angulaire de 0,5 et une portée prédéfinie de 80m (Figure 15). Pour chacun des deux cas, nous avons mis le scanner sur le véhicule dans les mêmes configurations spatiales 5.3. Analyse de la complétude Pour cette analyse, nous avons doté un véhicule d un scanner laser (hauteur de 2,60m) avec un champ d ouverture de 360, une fréquence de balayage de 60Hz, une résolution angulaire de 0,5 et une portée prédéfinie de 80m. La vitesse du véhicule est de 50km/h. La Figure 13 et la Figure 14 montrent deux nuages de points obtenus par la simulation avec le même type de scanner. La différence entre ces deux acquisitions est l orientation du scanner laser : tangage de 20 (Figure 13) et tangage de 0 (Figure 14). Si nous comparons les zones d intérêt représentées par les cercles rouges, il est clair que le bâtiment est mieux reconstruit et est plus complet avec le tangage de 20. Ainsi, si on souhaite avoir un maximum d information de la scène, cette simulation montre que le premier concept (tangage de 20 ) est plus pertinent Analyse de l homogénéité Pour cette analyse, nous comparons les deux zones d intérêt représentées par les cercles bleus dans la Figure 13. On voit nettement la différence de la densité des nuages de points. Si l on considère que la densité de la zone 0 est la densité correcte, la zone 1 présente une sur-densité car elle est très proche du scanner laser tandis que la zone 2 affiche une sous-densité car elle est située plus loin du scanner laser. Cette inhomogénéité pose soit le problème de stockage de données (dans le cas d une sur-densité), soit un problème de déficit d information (dans le cas d une sous-densité). 6. Conclusions et perspectives Nous avons montré dans ce papier l aide qu apporte la simulation pour la conception d un système de cartographie mobile à scanner laser. Au vu des résultats, on vérifie aussi que la simulation permet de caractériser parfaitement le système de perception et d économiser non seulement sur le coût d un équipement réel mais aussi sur le temps nécessaire à son prototypage et son développement. Néanmoins, le scanner laser simulé a été utilisé ici dans des conditions parfaites. Dans la suite des travaux, on 7
8 envisage d inclure, dans le modèle du scanner laser, certains défauts (bruit, retard temporel, absorption de l énergie, etc.) et d ajouter au système des caméras, afin d obtenir une reconstruction de l environnement plus réaliste. Une nouvelle version de SiVIC, avec des routes et des infrastructures mieux simulées, est à présent disponible ; elle nous permettra de simuler l environnement urbain de façon encore plus réaliste. Remerciements Ce travail a été partiellement financé et réalisé dans le cadre du projet de recherche «Terra Numerica» du pôle de compétitivité Cap Digital. Références [ABU 05] I. Abuhadrous, Système embarqué temps réel de localisation et de modélisation 3D par fusion multicapteur, thèse de doctorat, Ecole des Mines de Paris, 2005 [AMO 07] L. Amoureus, M.P.H. Bomers, R. Fuser, M. Tosatto, Integration of LiDAR and Terrestrial Mobile Mapping Technology for the Creation of a Comprehensive Road Cadastre, the 5 th International Symposium on Mobile Mapping Technology, May 2007, Padua [BOU 06] C. Boussard, N. Hautière, D. Gruyer, Prototypage d un capteur monoculaire générique de visibilité pour véhicule traceur, Majestic 2006, novembre, Lorient. systèmes d aide à la conduite, Journée Automatique Automobile, 8-9 novembre 2005, Bordeaux. [GRU 06] D. Gruyer, C. Royere, N. du Lac, G. Michel, J.M. Blosseville, SiVIC and RTMaps, interconnected platforms for the conception and the evaluation of driving assistance systems, ITSC'06, october 2006, London. [HUN 06] G. Hunter, C. Cox, J. Kremer, Development of a Commercial Laser Scanning Mobile Mapping System StreetMapper, Second International Workshop The Future of Remote Sensing, october 2006, Antwerp [LEI web] [MAN 00] D. Manandhar, R. Shibasaki, Geo-referencing of Multi-sensor Range Data for Vehicle-borne Laser Mapping System (VLMS), 21 st Asian Conference on Remote Sensing (ACRS), Vol 2, pp , 4-8 december, Taipei [RIE web] [TAL 04] J. Talaya, R. Alamus, E. Bosch, A. Serra, W. Kornus, A. Baron, Integration of a Terrestrial Laser Scanner with GPS-IMU Orientation Sensors, XXth ISPRS Congress, july 2004, Istanbul [TRI 07] B. Hook, G. Lepère, Trimble surescan technology white paper, Trimble Survey, Westminster, Colorado, October 2007 [TRI web] [BRU 06] X. Brun, F. Goulette, P. Charbonnier, C. Bertoncini, S. Blaes, Modélisation 3D de routes par télémétrie laser embarquée pour la mesure de la distance de visibilité, Journées des Sciences de l Ingénieur 2006, 5-6 décembre 2006, Marne-la-Vallée. [BRU 07] X. Brun, Modélisation 3D texturée en temps réel d environnements urbains et routiers et application au calcul de distance de visibiilté routière, thèse de doctorat, Ecole des Mines de Paris, 2007 [GOU 06] F. Goulette, I. Abuhadrous, F. Nashashibi, S. Ammoun, C. Laurgeau, An Integrated On-Board Laser Range Sensing System for On-the-Way City and Road Modelling, The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, vol. 34, Part A, [GRA 07] G. Gräfe, Quality Management In Kinematic Laser Scanning Applications, the 5 th International Symposium on Mobile Mapping Technology, May 2007, Padua [GRU 05] D. Gruyer, C. Royere, S. Glaser, SiVIC, une plate forme de prototypage d environnement routier et de capteurs virtuels pour la conception et l évaluation de 8


9 Figure 10 : Scène virtuelle d environnement urbain n 1 Figure 11 : Génération du nuage de points 9


 Figure 15 : Nuage de points")
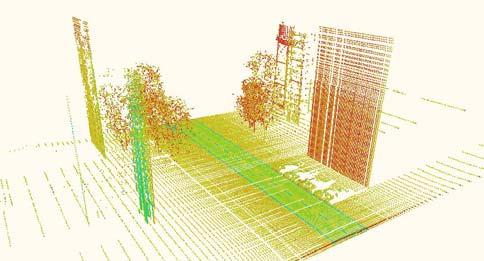
10 Figure 12 : Scène virtuelle d environnement urbain n Figure 13 : Nuage de points obtenu par simulation (version 1) Figure 14 : Nuage de points obtenu par simulation (version 2) Figure 15 : Nuage de points obtenu par simulation (version 3) 10
Cartographie Mobile à MINES ParisTech
 Cartographie Mobile à MINES ParisTech Entre robotique, géomatique et nouveaux usages Pr. François Goulette Plan 4 septembre 2013 2 Automatisation de maintenance en environnements industriels (1993) Automatisation
Cartographie Mobile à MINES ParisTech Entre robotique, géomatique et nouveaux usages Pr. François Goulette Plan 4 septembre 2013 2 Automatisation de maintenance en environnements industriels (1993) Automatisation
LIDAR LAUSANNE 2012. Nouvelles données altimétriques sur l agglomération lausannoise par technologie laser aéroporté et ses produits dérivés
 LIDAR LAUSANNE 2012 Nouvelles données altimétriques sur l agglomération lausannoise par technologie laser aéroporté et ses produits dérivés LIDAR 2012, nouveaux modèles altimétriques 1 Affaire 94022 /
LIDAR LAUSANNE 2012 Nouvelles données altimétriques sur l agglomération lausannoise par technologie laser aéroporté et ses produits dérivés LIDAR 2012, nouveaux modèles altimétriques 1 Affaire 94022 /
Présentation du sujet de thèse Schémas temporels hybrides fondés sur les SVMs pour l analyse du comportement du conducteur
 Présentation du sujet de thèse Schémas temporels hybrides fondés sur les SVMs pour l analyse du comportement du conducteur Réalisé par : Bassem Besbes Laboratoire d Informatique, Traitement de l Information
Présentation du sujet de thèse Schémas temporels hybrides fondés sur les SVMs pour l analyse du comportement du conducteur Réalisé par : Bassem Besbes Laboratoire d Informatique, Traitement de l Information
Techniques d interaction dans la visualisation de l information Séminaire DIVA
 Techniques d interaction dans la visualisation de l information Séminaire DIVA Zingg Luca, luca.zingg@unifr.ch 13 février 2007 Résumé Le but de cet article est d avoir une vision globale des techniques
Techniques d interaction dans la visualisation de l information Séminaire DIVA Zingg Luca, luca.zingg@unifr.ch 13 février 2007 Résumé Le but de cet article est d avoir une vision globale des techniques
ÉTUDE DE L EFFICACITÉ DE GÉOGRILLES POUR PRÉVENIR L EFFONDREMENT LOCAL D UNE CHAUSSÉE
 ÉTUDE DE L EFFICACITÉ DE GÉOGRILLES POUR PRÉVENIR L EFFONDREMENT LOCAL D UNE CHAUSSÉE ANALYSIS OF THE EFFICIENCY OF GEOGRIDS TO PREVENT A LOCAL COLLAPSE OF A ROAD Céline BOURDEAU et Daniel BILLAUX Itasca
ÉTUDE DE L EFFICACITÉ DE GÉOGRILLES POUR PRÉVENIR L EFFONDREMENT LOCAL D UNE CHAUSSÉE ANALYSIS OF THE EFFICIENCY OF GEOGRIDS TO PREVENT A LOCAL COLLAPSE OF A ROAD Céline BOURDEAU et Daniel BILLAUX Itasca
Cours IV Mise en orbite
 Introduction au vol spatial Cours IV Mise en orbite If you don t know where you re going, you ll probably end up somewhere else. Yogi Berra, NY Yankees catcher v1.2.8 by-sa Olivier Cleynen Introduction
Introduction au vol spatial Cours IV Mise en orbite If you don t know where you re going, you ll probably end up somewhere else. Yogi Berra, NY Yankees catcher v1.2.8 by-sa Olivier Cleynen Introduction
Réalité virtuelle au service de la maintenance
 Réalité virtuelle au service de la maintenance Christian Boucheny EDF R&D SINETICS Séminaire Cartographie d intérieur et d extérieur ENSMP 04/09/2013 Sommaire 1. Application 1 : ADRM Aide à la Décision
Réalité virtuelle au service de la maintenance Christian Boucheny EDF R&D SINETICS Séminaire Cartographie d intérieur et d extérieur ENSMP 04/09/2013 Sommaire 1. Application 1 : ADRM Aide à la Décision
Analyse Sémantique de Nuages de Points 3D et d Images dans les Milieux Urbains
 Analyse Sémantique de Nuages de Points 3D et d Images dans les Milieux Urbains Andrés Felipe SERNA MORALES Directrice de thèse: Beatriz MARCOTEGUI ITURMENDI serna@cmm.ensmp.fr MINES ParisTech, Mathématiques
Analyse Sémantique de Nuages de Points 3D et d Images dans les Milieux Urbains Andrés Felipe SERNA MORALES Directrice de thèse: Beatriz MARCOTEGUI ITURMENDI serna@cmm.ensmp.fr MINES ParisTech, Mathématiques
Institut de recherche multidisciplinaire focalisé sur le développement durable urbain
 Future Cities Laboratory Institut de recherche multidisciplinaire focalisé sur le développement durable urbain Ian Smith Journée d information, Holcim, le 9 octobre 2013 Suisse - Singapour Similarités
Future Cities Laboratory Institut de recherche multidisciplinaire focalisé sur le développement durable urbain Ian Smith Journée d information, Holcim, le 9 octobre 2013 Suisse - Singapour Similarités
Colorisation et texturation temps réel d environnements urbains par système mobile avec scanner laser et caméra fish-eye
 Colorisation et texturation temps réel d environnements urbains par système mobile avec scanner laser et caméra fish-eye Résumé Jean-Emmanuel Deschaud, Xavier Brun, François Goulette Mines ParisTech, CAOR-Centre
Colorisation et texturation temps réel d environnements urbains par système mobile avec scanner laser et caméra fish-eye Résumé Jean-Emmanuel Deschaud, Xavier Brun, François Goulette Mines ParisTech, CAOR-Centre
Principe de symétrisation pour la construction d un test adaptatif
 Principe de symétrisation pour la construction d un test adaptatif Cécile Durot 1 & Yves Rozenholc 2 1 UFR SEGMI, Université Paris Ouest Nanterre La Défense, France, cecile.durot@gmail.com 2 Université
Principe de symétrisation pour la construction d un test adaptatif Cécile Durot 1 & Yves Rozenholc 2 1 UFR SEGMI, Université Paris Ouest Nanterre La Défense, France, cecile.durot@gmail.com 2 Université
Relever les défis des véhicules autonomes
 EMM 2014 12eme rencontre européenne de mécatronique Relever les défis des véhicules autonomes Mathias Perrollaz Ingénieur expert Inria Christian Laugier Directeur de recherche Inria E-Motion Team Annecy,
EMM 2014 12eme rencontre européenne de mécatronique Relever les défis des véhicules autonomes Mathias Perrollaz Ingénieur expert Inria Christian Laugier Directeur de recherche Inria E-Motion Team Annecy,
Traitement bas-niveau
 Plan Introduction L approche contour (frontière) Introduction Objectifs Les traitements ont pour but d extraire l information utile et pertinente contenue dans l image en regard de l application considérée.
Plan Introduction L approche contour (frontière) Introduction Objectifs Les traitements ont pour but d extraire l information utile et pertinente contenue dans l image en regard de l application considérée.
INTRODUCTION A L ELECTRONIQUE NUMERIQUE ECHANTILLONNAGE ET QUANTIFICATION I. ARCHITECTURE DE L ELECRONIQUE NUMERIQUE
 INTRODUCTION A L ELECTRONIQUE NUMERIQUE ECHANTILLONNAGE ET QUANTIFICATION I. ARCHITECTURE DE L ELECRONIQUE NUMERIQUE Le schéma synoptique ci-dessous décrit les différentes étapes du traitement numérique
INTRODUCTION A L ELECTRONIQUE NUMERIQUE ECHANTILLONNAGE ET QUANTIFICATION I. ARCHITECTURE DE L ELECRONIQUE NUMERIQUE Le schéma synoptique ci-dessous décrit les différentes étapes du traitement numérique
Reconstruction de bâtiments en 3D à partir de nuages de points LIDAR
 Reconstruction de bâtiments en 3D à partir de nuages de points LIDAR Mickaël Bergem 25 juin 2014 Maillages et applications 1 Table des matières Introduction 3 1 La modélisation numérique de milieux urbains
Reconstruction de bâtiments en 3D à partir de nuages de points LIDAR Mickaël Bergem 25 juin 2014 Maillages et applications 1 Table des matières Introduction 3 1 La modélisation numérique de milieux urbains
Notice d Utilisation du logiciel Finite Element Method Magnetics version 3.4 auteur: David Meeker
 Notice d Utilisation du logiciel Finite Element Method Magnetics version 3.4 auteur: David Meeker DeCarvalho Adelino adelino.decarvalho@iutc.u-cergy.fr septembre 2005 Table des matières 1 Introduction
Notice d Utilisation du logiciel Finite Element Method Magnetics version 3.4 auteur: David Meeker DeCarvalho Adelino adelino.decarvalho@iutc.u-cergy.fr septembre 2005 Table des matières 1 Introduction
L Avenue Digital Media. L aménagement du territoire à travers la maquette 3D. créateur de mondes virtuels
 L Avenue Digital Media L aménagement du territoire à travers la maquette 3D créateur de mondes virtuels L Avenue Digital Media En quelques mots L Avenue Digital Media est spécialisée dans la création numérique
L Avenue Digital Media L aménagement du territoire à travers la maquette 3D créateur de mondes virtuels L Avenue Digital Media En quelques mots L Avenue Digital Media est spécialisée dans la création numérique
Cie L*43.62 a* -0.12 b* -20.16. Des couleurs qui tiennent la route. Solutions de gestion des couleurs pour le secteur de l automobile
 Cie L*43.62 a* -0.12 b* -20.16 Des couleurs qui tiennent la route Solutions de gestion des couleurs pour le secteur de l automobile La couleur fait la différence Qu il s agisse d établir l identité visuelle
Cie L*43.62 a* -0.12 b* -20.16 Des couleurs qui tiennent la route Solutions de gestion des couleurs pour le secteur de l automobile La couleur fait la différence Qu il s agisse d établir l identité visuelle
 Utilisation d informations visuelles dynamiques en asservissement visuel Armel Crétual IRISA, projet TEMIS puis VISTA L asservissement visuel géométrique Principe : Réalisation d une tâche robotique par
Utilisation d informations visuelles dynamiques en asservissement visuel Armel Crétual IRISA, projet TEMIS puis VISTA L asservissement visuel géométrique Principe : Réalisation d une tâche robotique par
Caractéristiques des ondes
 Caractéristiques des ondes Chapitre Activités 1 Ondes progressives à une dimension (p 38) A Analyse qualitative d une onde b Fin de la Début de la 1 L onde est progressive puisque la perturbation se déplace
Caractéristiques des ondes Chapitre Activités 1 Ondes progressives à une dimension (p 38) A Analyse qualitative d une onde b Fin de la Début de la 1 L onde est progressive puisque la perturbation se déplace
Analyse des bruits de clavier d ordinateur
 Analyse des bruits de clavier d ordinateur Introduction 1 Enregistrement des bruits de clavier 2 Analyse des bruits de clavier 3 Analyse du niveau de pression acoustique vs. temps 4 Sonie vs. temps 4 Acuité
Analyse des bruits de clavier d ordinateur Introduction 1 Enregistrement des bruits de clavier 2 Analyse des bruits de clavier 3 Analyse du niveau de pression acoustique vs. temps 4 Sonie vs. temps 4 Acuité
Immersion - Vision 3D dans la RV.
 Cours RVS Master II IVA Immersion - Vision 3D dans la RV. Cours de Réalité Virtuelle et Simulation Master II - IVA A. Mebarki - Maître de Conférences Département d'informatique Faculté des Mathématiques
Cours RVS Master II IVA Immersion - Vision 3D dans la RV. Cours de Réalité Virtuelle et Simulation Master II - IVA A. Mebarki - Maître de Conférences Département d'informatique Faculté des Mathématiques
LISACode. Un simulateur opérationnel pour LISA. Antoine PETITEAU LISAFrance - le 16 mai 2006
 LISACode Un simulateur opérationnel pour LISA Antoine PETITEAU LISAFrance - le 16 mai 2006 Plan Rappel sur LISACode. Validation du simulateur. Possibilités du simulateur. Résultats obtenus. Bruit de confusion.
LISACode Un simulateur opérationnel pour LISA Antoine PETITEAU LISAFrance - le 16 mai 2006 Plan Rappel sur LISACode. Validation du simulateur. Possibilités du simulateur. Résultats obtenus. Bruit de confusion.
Analyse des trajectoires acceptables en approche de virage assistance aux conducteurs
 DIVAS Analyse des trajectoires acceptables en approche de virage assistance aux conducteurs N 3.C.1 Décembre 2008 Projet financé par l Agence Nationale de la Recherche Responsable : S. Espié Projet ANR
DIVAS Analyse des trajectoires acceptables en approche de virage assistance aux conducteurs N 3.C.1 Décembre 2008 Projet financé par l Agence Nationale de la Recherche Responsable : S. Espié Projet ANR
Application de l AMDEC à un satellite en phase active
 Application de l AMDEC à un satellite en phase active Myriam Noureddine* Mohamed Amine Messaoudi** Département d Informatique, Faculté des Sciences, Université des Sciences et de la Technologie d Oran
Application de l AMDEC à un satellite en phase active Myriam Noureddine* Mohamed Amine Messaoudi** Département d Informatique, Faculté des Sciences, Université des Sciences et de la Technologie d Oran
N. Paparoditis, Laboratoire MATIS
 N. Paparoditis, Laboratoire MATIS Contexte: Diffusion de données et services locaux STEREOPOLIS II Un véhicule de numérisation mobile terrestre Lasers Caméras Système de navigation/positionnement STEREOPOLIS
N. Paparoditis, Laboratoire MATIS Contexte: Diffusion de données et services locaux STEREOPOLIS II Un véhicule de numérisation mobile terrestre Lasers Caméras Système de navigation/positionnement STEREOPOLIS
Solution A La Gestion Des Objets Java Pour Des Systèmes Embarqués
 International Journal of Engineering Research and Development e-issn: 2278-067X, p-issn: 2278-800X, www.ijerd.com Volume 7, Issue 5 (June 2013), PP.99-103 Solution A La Gestion Des Objets Java Pour Des
International Journal of Engineering Research and Development e-issn: 2278-067X, p-issn: 2278-800X, www.ijerd.com Volume 7, Issue 5 (June 2013), PP.99-103 Solution A La Gestion Des Objets Java Pour Des
Ligne Dentaire. Système Dentaire Panoramique et 3D
 Ligne Dentaire Système Dentaire Panoramique et 3D La Société Villa Sistemi Medicali est fière de présenter son nouveau panoramique Rotograph Evo 3D, un système d'imagerie dentaire avec fonctionnalité 3-en-1:
Ligne Dentaire Système Dentaire Panoramique et 3D La Société Villa Sistemi Medicali est fière de présenter son nouveau panoramique Rotograph Evo 3D, un système d'imagerie dentaire avec fonctionnalité 3-en-1:
Fonctions de plusieurs variables
 Module : Analyse 03 Chapitre 00 : Fonctions de plusieurs variables Généralités et Rappels des notions topologiques dans : Qu est- ce que?: Mathématiquement, n étant un entier non nul, on définit comme
Module : Analyse 03 Chapitre 00 : Fonctions de plusieurs variables Généralités et Rappels des notions topologiques dans : Qu est- ce que?: Mathématiquement, n étant un entier non nul, on définit comme
Eléments de spécification des systèmes temps réel Pierre-Yves Duval (cppm)
") Eléments de spécification des systèmes temps réel Pierre-Yves Duval (cppm) Ecole d informatique temps réel - La Londes les Maures 7-11 Octobre 2002 - Evénements et architectures - Spécifications de performances
Eléments de spécification des systèmes temps réel Pierre-Yves Duval (cppm) Ecole d informatique temps réel - La Londes les Maures 7-11 Octobre 2002 - Evénements et architectures - Spécifications de performances
ASSURER LA QUALITE DES RESULTATS D ESSAI ET D ETALONNAGE Assuring the quality of test and calibration results
 ASSURER LA QUALITE DES RESULTATS D ESSAI ET D ETALONNAGE Assuring the quality of test and calibration results Soraya Amarouche Armelle Picau Olivier Pierson Raphaël Deal Laboratoire National de Métrologie
ASSURER LA QUALITE DES RESULTATS D ESSAI ET D ETALONNAGE Assuring the quality of test and calibration results Soraya Amarouche Armelle Picau Olivier Pierson Raphaël Deal Laboratoire National de Métrologie
Introduction à l informatique temps réel Pierre-Yves Duval (cppm)
") Introduction à l informatique temps réel Pierre-Yves Duval (cppm) Ecole d informatique temps réel - La Londes les Maures 7-11 Octobre 2002 -Définition et problématique - Illustration par des exemples -Automatisme:
Introduction à l informatique temps réel Pierre-Yves Duval (cppm) Ecole d informatique temps réel - La Londes les Maures 7-11 Octobre 2002 -Définition et problématique - Illustration par des exemples -Automatisme:
Rappel sur les bases de données
 Rappel sur les bases de données 1) Généralités 1.1 Base de données et système de gestion de base de donnés: définitions Une base de données est un ensemble de données stockées de manière structurée permettant
Rappel sur les bases de données 1) Généralités 1.1 Base de données et système de gestion de base de donnés: définitions Une base de données est un ensemble de données stockées de manière structurée permettant
Opérations de base sur ImageJ
 Opérations de base sur ImageJ TPs d hydrodynamique de l ESPCI, J. Bico, M. Reyssat, M. Fermigier ImageJ est un logiciel libre, qui fonctionne aussi bien sous plate-forme Windows, Mac ou Linux. Initialement
Opérations de base sur ImageJ TPs d hydrodynamique de l ESPCI, J. Bico, M. Reyssat, M. Fermigier ImageJ est un logiciel libre, qui fonctionne aussi bien sous plate-forme Windows, Mac ou Linux. Initialement
Société de Geo-engineering
 Gestion de la maintenance des réseaux le géoréférencement inertiel direct, technologie automatisée d'acquisition d'objets 2D / 3D vers les SIG Société de Geo-engineering Activité d'expertise et d'ingénierie
Gestion de la maintenance des réseaux le géoréférencement inertiel direct, technologie automatisée d'acquisition d'objets 2D / 3D vers les SIG Société de Geo-engineering Activité d'expertise et d'ingénierie
Prédiction de couverture de champ radioélectrique pour les réseaux radiomobiles : L apport du Système d Information Géographique ArcInfo 8
 Prédiction de couverture de champ radioélectrique pour les réseaux radiomobiles : L apport du Système d Information Géographique ArcInfo 8 Christine TURCK 1 * et **, Christiane WEBER**, Dominique THOME*
Prédiction de couverture de champ radioélectrique pour les réseaux radiomobiles : L apport du Système d Information Géographique ArcInfo 8 Christine TURCK 1 * et **, Christiane WEBER**, Dominique THOME*
Modélisation multi-agent d allocation des ressources : application à la maintenance
 Modélisation multi-agent d allocation des ressources : application à la maintenance Mohamed Kharbach (*), Mustapha Ouardouz (*), Zoubir El Felsoufi (*) (*) Equipe de Modélisation Mathématique & Contrôle
Modélisation multi-agent d allocation des ressources : application à la maintenance Mohamed Kharbach (*), Mustapha Ouardouz (*), Zoubir El Felsoufi (*) (*) Equipe de Modélisation Mathématique & Contrôle
Pour un citoyen mieux informé en transports
 Pour un citoyen mieux informé en transports Congrès géospatial international 2012 Serge Kéna-Cohen: Vice Président, Géomatique et isociété, Fujitsu Françoys Labonté: CRIM 16 mai 2012 Petite histoire du
Pour un citoyen mieux informé en transports Congrès géospatial international 2012 Serge Kéna-Cohen: Vice Président, Géomatique et isociété, Fujitsu Françoys Labonté: CRIM 16 mai 2012 Petite histoire du
High Performance by Exploiting Information Locality through Reverse Computing. Mouad Bahi
 Thèse High Performance by Exploiting Information Locality through Reverse Computing Présentée et soutenue publiquement le 21 décembre 2011 par Mouad Bahi pour l obtention du Doctorat de l université Paris-Sud
Thèse High Performance by Exploiting Information Locality through Reverse Computing Présentée et soutenue publiquement le 21 décembre 2011 par Mouad Bahi pour l obtention du Doctorat de l université Paris-Sud
Intelligence artificielle et les défis en robotique mobile et autonome
 Intelligence artificielle et les défis en robotique mobile et autonome Éric Beaudry http://planiart.usherbrooke.ca/~eric/ Étudiant au doctorat en informatique Laboratoires Planiart et Laborius 13 février
Intelligence artificielle et les défis en robotique mobile et autonome Éric Beaudry http://planiart.usherbrooke.ca/~eric/ Étudiant au doctorat en informatique Laboratoires Planiart et Laborius 13 février
Scanner laser HDS7000 Ultra rapide, à portée étendue
 > 1 million de points / sec Scanner laser HDS7000 Ultra rapide, à portée étendue > 180 m de portée HDS7000 Scanner laser ultra rapide pour les professionnels exigeants Les scanners à mesure de phase sont
> 1 million de points / sec Scanner laser HDS7000 Ultra rapide, à portée étendue > 180 m de portée HDS7000 Scanner laser ultra rapide pour les professionnels exigeants Les scanners à mesure de phase sont
Les véhicules hybrides, un compromis incontournable avant l électromobilité.
 Les véhicules hybrides, un compromis incontournable avant l électromobilité. Laboratoire Transport et Environnement R. Trigui INRETS-LTE Réseau National MEGEVH Journée RAE. 21 septembre 2010 Les différents
Les véhicules hybrides, un compromis incontournable avant l électromobilité. Laboratoire Transport et Environnement R. Trigui INRETS-LTE Réseau National MEGEVH Journée RAE. 21 septembre 2010 Les différents
Une proposition d extension de GML pour un modèle générique d intégration de données spatio-temporelles hétérogènes
 303 Schedae, 2007 Prépublication n 46 Fascicule n 2 Une proposition d extension de GML pour un modèle générique d intégration de données spatio-temporelles hétérogènes Samya Sagar, Mohamed Ben Ahmed Laboratoire
303 Schedae, 2007 Prépublication n 46 Fascicule n 2 Une proposition d extension de GML pour un modèle générique d intégration de données spatio-temporelles hétérogènes Samya Sagar, Mohamed Ben Ahmed Laboratoire
ÉVALUATION PRIMAIRE D UN SYSTÈME D AIDE AU CONTRÔLE AÉRIEN EN ROUTE
 Proceedings of the SELF-ACE 001 Conference Ergonomics for changing work ÉVALUATION PRIMAIRE D UN SYSTÈME D AIDE AU CONTRÔLE AÉRIEN EN ROUTE CELLIER JEAN-MARIE Laboratoire Travail et Cognition (LTC), UMR
Proceedings of the SELF-ACE 001 Conference Ergonomics for changing work ÉVALUATION PRIMAIRE D UN SYSTÈME D AIDE AU CONTRÔLE AÉRIEN EN ROUTE CELLIER JEAN-MARIE Laboratoire Travail et Cognition (LTC), UMR
La démarche d innovation streching vs la démarche d innovation de rupture
 La démarche d innovation streching vs la démarche d innovation de rupture Présentation des key learnings CONSEIL EN INNOVATION Etude qualitative de benchmarking sur les démarches d innovation de 15 grandes
La démarche d innovation streching vs la démarche d innovation de rupture Présentation des key learnings CONSEIL EN INNOVATION Etude qualitative de benchmarking sur les démarches d innovation de 15 grandes
Station Totale Geomax Série Zoom30
 Station Totale Geomax Série Zoom30 GeoMax Profil de l entreprise GeoMax est une entreprise fort de solides positions sur L étroite collaboration qui présente à l international et le marché des technologies
Station Totale Geomax Série Zoom30 GeoMax Profil de l entreprise GeoMax est une entreprise fort de solides positions sur L étroite collaboration qui présente à l international et le marché des technologies
Compte-rendu Réunion générale. Grenoble, le 29 juin 2011 URBASIS
 URBASIS Sismologie urbaine : évaluation de la vulnérabilité et des dommages sismiques par méthodes innovantes ANR09RISK009 URBASIS Compterendu Réunion générale Grenoble, le 29 juin 2011 Participants: J.
URBASIS Sismologie urbaine : évaluation de la vulnérabilité et des dommages sismiques par méthodes innovantes ANR09RISK009 URBASIS Compterendu Réunion générale Grenoble, le 29 juin 2011 Participants: J.
UNE EXPERIENCE, EN COURS PREPARATOIRE, POUR FAIRE ORGANISER DE L INFORMATION EN TABLEAU
 Odile VERBAERE UNE EXPERIENCE, EN COURS PREPARATOIRE, POUR FAIRE ORGANISER DE L INFORMATION EN TABLEAU Résumé : Cet article présente une réflexion sur une activité de construction de tableau, y compris
Odile VERBAERE UNE EXPERIENCE, EN COURS PREPARATOIRE, POUR FAIRE ORGANISER DE L INFORMATION EN TABLEAU Résumé : Cet article présente une réflexion sur une activité de construction de tableau, y compris
Le Scanner 3D Dynamique
 Le Scanner 3D Dynamique Présentation & Références 2015 Page 1 / 9 1. Présentation Techniques Topo, est une société de Géomètres Experts créée en 1964 comptant aujourd hui près de 120 collaborateurs répartis
Le Scanner 3D Dynamique Présentation & Références 2015 Page 1 / 9 1. Présentation Techniques Topo, est une société de Géomètres Experts créée en 1964 comptant aujourd hui près de 120 collaborateurs répartis
BeSpoon et l homme Connecté
 BeSpoon et l homme Connecté Paris 25 et 26 Mars BeSpoon est une société «Fabless» qui a développé en collaboration avec le CEA-Leti un composant IR-UWB (Impulse Radio Ultra Wide Band) dédié à la localisation
BeSpoon et l homme Connecté Paris 25 et 26 Mars BeSpoon est une société «Fabless» qui a développé en collaboration avec le CEA-Leti un composant IR-UWB (Impulse Radio Ultra Wide Band) dédié à la localisation
Réflexion sur la mise en place d'un système mobile d'aide à la navigation destiné aux services d'urgence basée sur une solution libre.
 Réflexion sur la mise en place d'un système mobile d'aide à la navigation destiné aux services d'urgence basée sur une solution libre. Denis Fouquet * Jean-Michel Follin ** Laboratoire de Géodésie et de
Réflexion sur la mise en place d'un système mobile d'aide à la navigation destiné aux services d'urgence basée sur une solution libre. Denis Fouquet * Jean-Michel Follin ** Laboratoire de Géodésie et de
Manuel d utilisation Profilsearch
 Manuel d utilisation Profilsearch 1 SOMMAIRE Chapitre 1 Le bureau du recruteur 1.1 Le moteur de recherche rapide 1.2 L agenda 1.3 Contacts avec les candidats 1.4 Mes contacts candidats 1.5 Etats 1.6 Candidatures/Reporting
Manuel d utilisation Profilsearch 1 SOMMAIRE Chapitre 1 Le bureau du recruteur 1.1 Le moteur de recherche rapide 1.2 L agenda 1.3 Contacts avec les candidats 1.4 Mes contacts candidats 1.5 Etats 1.6 Candidatures/Reporting
Projet de Traitement du Signal Segmentation d images SAR
 Projet de Traitement du Signal Segmentation d images SAR Introduction En analyse d images, la segmentation est une étape essentielle, préliminaire à des traitements de haut niveau tels que la classification,
Projet de Traitement du Signal Segmentation d images SAR Introduction En analyse d images, la segmentation est une étape essentielle, préliminaire à des traitements de haut niveau tels que la classification,
LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE
 LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE 2. L EFFET GYROSCOPIQUE Les lois physiques qui régissent le mouvement des véhicules terrestres sont des lois universelles qui s appliquent
LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE 2. L EFFET GYROSCOPIQUE Les lois physiques qui régissent le mouvement des véhicules terrestres sont des lois universelles qui s appliquent
Chapitre 4 : Guide de Mouvement et Masque
 Cours Flash Chapitre 4 : Guide de Mouvement et Masque Rappel : les fichiers fla et swf sont dans le fichier «4_Guide de mouvement et masque.zip». SOMMAIRE 1 OBJECTIFS DU CHAPITRE... 1 2 INTRODUCTION...
Cours Flash Chapitre 4 : Guide de Mouvement et Masque Rappel : les fichiers fla et swf sont dans le fichier «4_Guide de mouvement et masque.zip». SOMMAIRE 1 OBJECTIFS DU CHAPITRE... 1 2 INTRODUCTION...
Projet du service «ON DEMAND BUS» à Kashiwa (Japon)
") Module COSMI Master TRADD PFR Mina KAGAWA (Japon) Youssef MHIMRA (Maroc) Projet du service «ON DEMAND BUS» à Kashiwa (Japon) Aperçu général sur la ville de Kashiwa : La ville de Kashiwa est située à environ
Module COSMI Master TRADD PFR Mina KAGAWA (Japon) Youssef MHIMRA (Maroc) Projet du service «ON DEMAND BUS» à Kashiwa (Japon) Aperçu général sur la ville de Kashiwa : La ville de Kashiwa est située à environ
Cartographie mobile implantée au service de police de la ville de Québec
 Cartographie mobile implantée au service de police de la ville de Québec NSim Technology Jimmy Perron, M. Sc. Président NSim Technology Le SPVQ > Désert plus de 550 000 citoyens > 1000 employés (Policiers
Cartographie mobile implantée au service de police de la ville de Québec NSim Technology Jimmy Perron, M. Sc. Président NSim Technology Le SPVQ > Désert plus de 550 000 citoyens > 1000 employés (Policiers
TD : Codage des images
 TD : Codage des images Les navigateurs Web (Netscape, IE, Mozilla ) prennent en charge les contenus textuels (au format HTML) ainsi que les images fixes (GIF, JPG, PNG) ou animée (GIF animée). Comment
TD : Codage des images Les navigateurs Web (Netscape, IE, Mozilla ) prennent en charge les contenus textuels (au format HTML) ainsi que les images fixes (GIF, JPG, PNG) ou animée (GIF animée). Comment
Equipement. électronique
 MASTER ISIC Les générateurs de fonctions 1 1. Avant-propos C est avec l oscilloscope, le multimètre et l alimentation stabilisée, l appareil le plus répandu en laboratoire. BUT: Fournir des signau électriques
MASTER ISIC Les générateurs de fonctions 1 1. Avant-propos C est avec l oscilloscope, le multimètre et l alimentation stabilisée, l appareil le plus répandu en laboratoire. BUT: Fournir des signau électriques
Tux Paint. 1. Informations générales sur le logiciel. Auteur : Bill Kendrick et l équipe de développement de New Breed Software
 1. Informations générales sur le logiciel Auteur : Bill Kendrick et l équipe de développement de New Breed Software Version : 0.9.13 Licence : GPL Date de parution : octobre 2004 Environnement requis :
1. Informations générales sur le logiciel Auteur : Bill Kendrick et l équipe de développement de New Breed Software Version : 0.9.13 Licence : GPL Date de parution : octobre 2004 Environnement requis :
Tuto pour connecter une source RVB RGB à un moniteur Commodore / Amiga
 Tuto pour connecter une source RVB RGB à un moniteur Commodore / Amiga Il faut 1 moniteur Commodore 1084S / 1083S-D1 Ecran 1084S (au dos, il est indiqué 1083S-D1), je l ai eut avec un Amiga 600 et on va
Tuto pour connecter une source RVB RGB à un moniteur Commodore / Amiga Il faut 1 moniteur Commodore 1084S / 1083S-D1 Ecran 1084S (au dos, il est indiqué 1083S-D1), je l ai eut avec un Amiga 600 et on va
www.type3.com DECOUVREZ Discover TYPE EDIT V12 Français
 www.type3.com DECOUVREZ Discover TYPE EDIT V12 Français 12-2013 1 Découvrez TYPE EDIT V12, la nouvelle version de notre logiciel de CFAO pour les applications industrielles et artistiques dédiées aux machines
www.type3.com DECOUVREZ Discover TYPE EDIT V12 Français 12-2013 1 Découvrez TYPE EDIT V12, la nouvelle version de notre logiciel de CFAO pour les applications industrielles et artistiques dédiées aux machines
CAP CAMION A ASSISTANCE PNEUMATIQUE
 Séminaire mi parcours Stock-e 2010 CAP CAMION A ASSISTANCE PNEUMATIQUE Iyad Balloul Renault Trucks - iyad.balloul@volvo.com Eric Bideaux INSA Lyon - eric.bideaux@insa-lyon.fr Marc Michard LMFA - Marc.Michard@ec-lyon.fr
Séminaire mi parcours Stock-e 2010 CAP CAMION A ASSISTANCE PNEUMATIQUE Iyad Balloul Renault Trucks - iyad.balloul@volvo.com Eric Bideaux INSA Lyon - eric.bideaux@insa-lyon.fr Marc Michard LMFA - Marc.Michard@ec-lyon.fr
Contributions à l expérimentation sur les systèmes distribués de grande taille
 Contributions à l expérimentation sur les systèmes distribués de grande taille Lucas Nussbaum Soutenance de thèse 4 décembre 2008 Lucas Nussbaum Expérimentation sur les systèmes distribués 1 / 49 Contexte
Contributions à l expérimentation sur les systèmes distribués de grande taille Lucas Nussbaum Soutenance de thèse 4 décembre 2008 Lucas Nussbaum Expérimentation sur les systèmes distribués 1 / 49 Contexte
L analyse d images regroupe plusieurs disciplines que l on classe en deux catégories :
 La vision nous permet de percevoir et d interpreter le monde qui nous entoure. La vision artificielle a pour but de reproduire certaines fonctionnalités de la vision humaine au travers de l analyse d images.
La vision nous permet de percevoir et d interpreter le monde qui nous entoure. La vision artificielle a pour but de reproduire certaines fonctionnalités de la vision humaine au travers de l analyse d images.
ANALYSE CATIA V5. 14/02/2011 Daniel Geffroy IUT GMP Le Mans
 ANALYSE CATIA V5 1 GSA Generative Structural Analysis 2 Modèle géométrique volumique Post traitement Pré traitement Maillage Conditions aux limites 3 Ouverture du module Choix du type d analyse 4 Calcul
ANALYSE CATIA V5 1 GSA Generative Structural Analysis 2 Modèle géométrique volumique Post traitement Pré traitement Maillage Conditions aux limites 3 Ouverture du module Choix du type d analyse 4 Calcul
Encryptions, compression et partitionnement des données
 Encryptions, compression et partitionnement des données Version 1.0 Grégory CASANOVA 2 Compression, encryption et partitionnement des données Sommaire 1 Introduction... 3 2 Encryption transparente des
Encryptions, compression et partitionnement des données Version 1.0 Grégory CASANOVA 2 Compression, encryption et partitionnement des données Sommaire 1 Introduction... 3 2 Encryption transparente des
Le projet 3D de la Ville de Liège: réflexions sur l'exploitation des données. Bernard Lechanteur, Responsable Cellule cartographie Ville de Liège
 Le projet 3D de la Ville de Liège: réflexions sur l'exploitation des données Bernard Lechanteur, Responsable Cellule cartographie Ville de Liège La cellule cartographie La cellule cartographie n est pas
Le projet 3D de la Ville de Liège: réflexions sur l'exploitation des données Bernard Lechanteur, Responsable Cellule cartographie Ville de Liège La cellule cartographie La cellule cartographie n est pas
Extrait des Exploitations Pédagogiques
 Pédagogiques Module : Compétitivité et créativité CI Première : Compétitivité et créativité CI institutionnel : Développement durable et compétitivité des produits Support : Robot - O : Caractériser les
Pédagogiques Module : Compétitivité et créativité CI Première : Compétitivité et créativité CI institutionnel : Développement durable et compétitivité des produits Support : Robot - O : Caractériser les
possibilités et limites des logiciels existants
 possibilités et limites des logiciels existants Dominique Groleau CERMA, UMR CNRS 1563, Ecole d Architecture de Nantes Journée thématique SFT- IBPSA, Outils de simulation thermo-aéraulique du bâtiment.
possibilités et limites des logiciels existants Dominique Groleau CERMA, UMR CNRS 1563, Ecole d Architecture de Nantes Journée thématique SFT- IBPSA, Outils de simulation thermo-aéraulique du bâtiment.
Cours de numérisation sur Epson Perfection
 Cours de numérisation sur Epson Perfection 1- Vérifiez la propreté de la vitre, placez l original sur celle-ci. À savoir, on peut numériser des transparents avec ce scanner ; il a un capteur CCD dans le
Cours de numérisation sur Epson Perfection 1- Vérifiez la propreté de la vitre, placez l original sur celle-ci. À savoir, on peut numériser des transparents avec ce scanner ; il a un capteur CCD dans le
Glossaire technique Veditec
 Glossaire technique Veditec 3D/2D DNR (digital noise réduction) La technologie DNR est un système de réduction numérique de bruit ayant pour but de réduire le bruit sur l image. Elle permet d obtenir des
Glossaire technique Veditec 3D/2D DNR (digital noise réduction) La technologie DNR est un système de réduction numérique de bruit ayant pour but de réduire le bruit sur l image. Elle permet d obtenir des
«Vous éditez, nous archivons!»
 LE LOGICIEL D'ARCHIVAGE ET DE CONSULTATION DE VOS DOCUMENTS DE GESTION (Graphiques et caractères) alliant PUISSANCE DES OUTILS INTERNET & SIMPLICITE D'UTILISATION «Vous éditez, nous archivons!» LOGISUD
LE LOGICIEL D'ARCHIVAGE ET DE CONSULTATION DE VOS DOCUMENTS DE GESTION (Graphiques et caractères) alliant PUISSANCE DES OUTILS INTERNET & SIMPLICITE D'UTILISATION «Vous éditez, nous archivons!» LOGISUD
Modélisation et simulation du trafic. Christine BUISSON (LICIT) Journée Simulation dynamique du trafic routier ENPC, 9 Mars 2005
 Journée Simulation dynamique du trafic routier ENPC, 9 Mars 2005") Modélisation et simulation du trafic Christine BUISSON (LICIT) Journée Simulation dynamique du trafic routier ENPC, 9 Mars 2005 Plan de la présentation! Introduction : modèles et simulations définition
Modélisation et simulation du trafic Christine BUISSON (LICIT) Journée Simulation dynamique du trafic routier ENPC, 9 Mars 2005 Plan de la présentation! Introduction : modèles et simulations définition
Améliorer les performances du site par l'utilisation de techniques de Web Mining
 Améliorer les performances du site par l'utilisation de techniques de Web Mining CLUB SAS 2001 17/18 octobre 2001 Stéfan Galissie LINCOLN stefan.galissie@lincoln.fr contact@web-datamining.net 2001 Sommaire
Améliorer les performances du site par l'utilisation de techniques de Web Mining CLUB SAS 2001 17/18 octobre 2001 Stéfan Galissie LINCOLN stefan.galissie@lincoln.fr contact@web-datamining.net 2001 Sommaire
Projet de traitement d'image - SI 381 reconstitution 3D d'intérieur à partir de photographies
 Projet de traitement d'image - SI 381 reconstitution 3D d'intérieur à partir de photographies Régis Boulet Charlie Demené Alexis Guyot Balthazar Neveu Guillaume Tartavel Sommaire Sommaire... 1 Structure
Projet de traitement d'image - SI 381 reconstitution 3D d'intérieur à partir de photographies Régis Boulet Charlie Demené Alexis Guyot Balthazar Neveu Guillaume Tartavel Sommaire Sommaire... 1 Structure
Mathématique et Automatique : de la boucle ouverte à la boucle fermée. Maïtine bergounioux Laboratoire MAPMO - UMR 6628 Université d'orléans
 Mathématique et Automatique : de la boucle ouverte à la boucle fermée Maïtine bergounioux Laboratoire MAPMO - UMR 6628 Université d'orléans Maitine.Bergounioux@labomath.univ-orleans.fr Plan 1. Un peu de
Mathématique et Automatique : de la boucle ouverte à la boucle fermée Maïtine bergounioux Laboratoire MAPMO - UMR 6628 Université d'orléans Maitine.Bergounioux@labomath.univ-orleans.fr Plan 1. Un peu de
Ré-ordonnancement adaptatif de messages dans un réseau ad hoc de véhicules
 Ré-ordonnancement adaptatif de messages dans un réseau ad hoc de véhicules M. Shawky, K. Chaaban, P. Crubillé Heudiasyc UMR 6599 CNRS, Univ. Tech. De Compiègne 1 ADAS (Advanced Driving Aid System) Reactive
Ré-ordonnancement adaptatif de messages dans un réseau ad hoc de véhicules M. Shawky, K. Chaaban, P. Crubillé Heudiasyc UMR 6599 CNRS, Univ. Tech. De Compiègne 1 ADAS (Advanced Driving Aid System) Reactive
Manuel d'utilisation de la maquette
 Manuel d'utilisation de la maquette PANNEAU SOLAIRE AUTO-PILOTE Enseignement au lycée Article Code Panneau solaire auto-piloté 14740 Document non contractuel L'énergie solaire L'énergie solaire est l'énergie
Manuel d'utilisation de la maquette PANNEAU SOLAIRE AUTO-PILOTE Enseignement au lycée Article Code Panneau solaire auto-piloté 14740 Document non contractuel L'énergie solaire L'énergie solaire est l'énergie
Contribution à la conception par la simulation en électronique de puissance : application à l onduleur basse tension
 Contribution à la conception par la simulation en électronique de puissance : application à l onduleur basse tension Cyril BUTTAY CEGELY VALEO 30 novembre 2004 Cyril BUTTAY Contribution à la conception
Contribution à la conception par la simulation en électronique de puissance : application à l onduleur basse tension Cyril BUTTAY CEGELY VALEO 30 novembre 2004 Cyril BUTTAY Contribution à la conception
Un environnement de déploiement automatique pour les applications à base de composants
 ICSSEA 2002-7 Lestideau Un environnement de déploiement automatique pour les applications à base de composants Vincent Lestideau Adele Team Bat C LSR-IMAG, 220 rue de la chimie Domaine Universitaire, BP
ICSSEA 2002-7 Lestideau Un environnement de déploiement automatique pour les applications à base de composants Vincent Lestideau Adele Team Bat C LSR-IMAG, 220 rue de la chimie Domaine Universitaire, BP
1 La visualisation des logs au CNES
 1 La visualisation des logs au CNES 1.1 Historique Depuis près de 2 ans maintenant, le CNES a mis en place une «cellule d analyse de logs». Son rôle est multiple : Cette cellule est chargée d analyser
1 La visualisation des logs au CNES 1.1 Historique Depuis près de 2 ans maintenant, le CNES a mis en place une «cellule d analyse de logs». Son rôle est multiple : Cette cellule est chargée d analyser
Intérêt du découpage en sous-bandes pour l analyse spectrale
 Intérêt du découpage en sous-bandes pour l analyse spectrale David BONACCI Institut National Polytechnique de Toulouse (INP) École Nationale Supérieure d Électrotechnique, d Électronique, d Informatique,
Intérêt du découpage en sous-bandes pour l analyse spectrale David BONACCI Institut National Polytechnique de Toulouse (INP) École Nationale Supérieure d Électrotechnique, d Électronique, d Informatique,
2 e partie de la composante majeure (8 points) Les questions prennent appui sur six documents A, B, C, D, E, F (voir pages suivantes).
 Les questions prennent appui sur six documents A, B, C, D, E, F (voir pages suivantes).") SUJET DE CONCOURS Sujet Exploitation d une documentation scientifique sur le thème de l énergie 2 e partie de la composante majeure (8 points) Les questions prennent appui sur six documents A, B, C, D,
SUJET DE CONCOURS Sujet Exploitation d une documentation scientifique sur le thème de l énergie 2 e partie de la composante majeure (8 points) Les questions prennent appui sur six documents A, B, C, D,
Synthèse d'images I. Venceslas BIRI IGM Université de Marne La
 Synthèse d'images I Venceslas BIRI IGM Université de Marne La La synthèse d'images II. Rendu & Affichage 1. Introduction Venceslas BIRI IGM Université de Marne La Introduction Objectif Réaliser une image
Synthèse d'images I Venceslas BIRI IGM Université de Marne La La synthèse d'images II. Rendu & Affichage 1. Introduction Venceslas BIRI IGM Université de Marne La Introduction Objectif Réaliser une image
Chapitre 2 : Caractéristiques du mouvement d un solide
 Chapitre 2 : Caractéristiques du mouvement d un solide I Rappels : Référentiel : Le mouvement d un corps est décris par rapport à un corps de référence et dépend du choix de ce corps. Ce corps de référence
Chapitre 2 : Caractéristiques du mouvement d un solide I Rappels : Référentiel : Le mouvement d un corps est décris par rapport à un corps de référence et dépend du choix de ce corps. Ce corps de référence
EFFET DOPPLER EXOPLANETES ET SMARTPHONES.
 EFFET DOPPLER EXOPLANETES ET SMARTPHONES. I. APPLICATIONS UTILISEES POUR CETTE ACTIVITE : Sauf indication les applications sont gratuites. 1.Pour connaître les exoplanetes : Exoplanet (android et IOS)
EFFET DOPPLER EXOPLANETES ET SMARTPHONES. I. APPLICATIONS UTILISEES POUR CETTE ACTIVITE : Sauf indication les applications sont gratuites. 1.Pour connaître les exoplanetes : Exoplanet (android et IOS)
Réseaux grande distance
 Chapitre 5 Réseaux grande distance 5.1 Définition Les réseaux à grande distance (WAN) reposent sur une infrastructure très étendue, nécessitant des investissements très lourds. Contrairement aux réseaux
Chapitre 5 Réseaux grande distance 5.1 Définition Les réseaux à grande distance (WAN) reposent sur une infrastructure très étendue, nécessitant des investissements très lourds. Contrairement aux réseaux
10ème Congrès Français d'acoustique Lyon, 12-16 Avril 2010
 10ème Congrès Français d'acoustique Lyon, 12-16 Avril 2010 Le compressed sensing pour l holographie acoustique de champ proche II: Mise en œuvre expérimentale. Antoine Peillot 1, Gilles Chardon 2, François
10ème Congrès Français d'acoustique Lyon, 12-16 Avril 2010 Le compressed sensing pour l holographie acoustique de champ proche II: Mise en œuvre expérimentale. Antoine Peillot 1, Gilles Chardon 2, François
Ensemble léger de prise de photo sous UV-A Tam Photo Kit n 1 pour appareil photo compact
 Ensemble léger de prise de photo sous UV-A Tam Photo Kit n 1 pour appareil photo compact Phone +33 (0)130 808 182 - Fax. +33 (0)130 808 199 /15 rue des Frères Lumière - ZI des Ebisoires BP136-78374 PLAISIR
Ensemble léger de prise de photo sous UV-A Tam Photo Kit n 1 pour appareil photo compact Phone +33 (0)130 808 182 - Fax. +33 (0)130 808 199 /15 rue des Frères Lumière - ZI des Ebisoires BP136-78374 PLAISIR
Champ électromagnétique?
 Qu est-ce qu un Champ électromagnétique? Alain Azoulay Consultant, www.radiocem.com 3 décembre 2013. 1 Définition trouvée à l article 2 de la Directive «champs électromagnétiques» : des champs électriques
Qu est-ce qu un Champ électromagnétique? Alain Azoulay Consultant, www.radiocem.com 3 décembre 2013. 1 Définition trouvée à l article 2 de la Directive «champs électromagnétiques» : des champs électriques
GEOLOCALISATION ET NAVIGATION A L AIDE DES SIGNAUX GNSS
 GEOLOCALISATION ET NAVIGATION A L AIDE DES SIGNAUX GNSS Thierry.Chapuis@cnes.fr 08/04/2014 1 EVOLUTION DU SYSTÈME GNSS 1995-2005 2005-2014 2014 GPS GNSS-1 GNSS-2 GLONASS Pas de garantie de service Dégradation
GEOLOCALISATION ET NAVIGATION A L AIDE DES SIGNAUX GNSS Thierry.Chapuis@cnes.fr 08/04/2014 1 EVOLUTION DU SYSTÈME GNSS 1995-2005 2005-2014 2014 GPS GNSS-1 GNSS-2 GLONASS Pas de garantie de service Dégradation
Franck VAUTIER, Jean-Pierre TOUMAZET, Erwan ROUSSEL, Marlène FAURE, Mohamed ABADI, Marta FLOREZ, Bertrand DOUSTEYSSIER
 Utilisation d images dérivées d un jeu de données LIDAR pour la détection automatisée de vestiges archéologiques (programme de recherche méthodologique LiDARCHEO) Franck VAUTIER, Jean-Pierre TOUMAZET,
Utilisation d images dérivées d un jeu de données LIDAR pour la détection automatisée de vestiges archéologiques (programme de recherche méthodologique LiDARCHEO) Franck VAUTIER, Jean-Pierre TOUMAZET,
Modulowatt : description d un système innovant de recharge de véhicule électrique
 Modulowatt : description d un système innovant de recharge de véhicule électrique Samer Ammoun, Clément Boussard, Laurent Bouraoui Abstract Ce papier présente l architecture d un système innovant de recharge
Modulowatt : description d un système innovant de recharge de véhicule électrique Samer Ammoun, Clément Boussard, Laurent Bouraoui Abstract Ce papier présente l architecture d un système innovant de recharge
Nouveaux enjeux de recherche en sécurité routière liés à l'automatisation des véhicules : conséquences sur l'activité de conduite
 Institut français des sciences et technologies des transports, de l aménagement et des réseaux Nouveaux enjeux de recherche en sécurité routière liés à l'automatisation des véhicules : conséquences sur
Institut français des sciences et technologies des transports, de l aménagement et des réseaux Nouveaux enjeux de recherche en sécurité routière liés à l'automatisation des véhicules : conséquences sur
Chapitre 02. La lumière des étoiles. Exercices :
 Chapitre 02 La lumière des étoiles. I- Lumière monochromatique et lumière polychromatique. )- Expérience de Newton (642 727). 2)- Expérience avec la lumière émise par un Laser. 3)- Radiation et longueur
Chapitre 02 La lumière des étoiles. I- Lumière monochromatique et lumière polychromatique. )- Expérience de Newton (642 727). 2)- Expérience avec la lumière émise par un Laser. 3)- Radiation et longueur
Les enjeux de la mobilité et de la réalité augmentée dans les jeux éducatifs localisés. GéoEduc3D
 Les enjeux de la mobilité et de la réalité augmentée dans les jeux éducatifs localisés Le projet de recherche GéoEduc3D Sylvain GENEVOIS Chargé d études et de recherche (INRP, équipe EducTice) Docteur
Les enjeux de la mobilité et de la réalité augmentée dans les jeux éducatifs localisés Le projet de recherche GéoEduc3D Sylvain GENEVOIS Chargé d études et de recherche (INRP, équipe EducTice) Docteur
TP SIN Traitement d image
 TP SIN Traitement d image Pré requis (l élève doit savoir): - Utiliser un ordinateur Objectif terminale : L élève doit être capable de reconnaître un format d image et d expliquer les différents types
TP SIN Traitement d image Pré requis (l élève doit savoir): - Utiliser un ordinateur Objectif terminale : L élève doit être capable de reconnaître un format d image et d expliquer les différents types
Cycle de vie du logiciel. Unified Modeling Language UML. UML: définition. Développement Logiciel. Salima Hassas. Unified Modeling Language
 Unified Modeling Language UML Salima Hassas Version Cycle de vie du logiciel Client Besoins Déploiement Analyse Test Conception Cours sur la base des transparents de : Gioavanna Di Marzo Serugendo et Frédéric
Unified Modeling Language UML Salima Hassas Version Cycle de vie du logiciel Client Besoins Déploiement Analyse Test Conception Cours sur la base des transparents de : Gioavanna Di Marzo Serugendo et Frédéric