Commande robuste de robots mobiles par mode glissant, vers un ménage à plusieurs?
|
|
|
- Sabine Boudreau
- il y a 10 ans
- Total affichages :
Transcription
1 Commande robuste de robots mobiles par mode glissant, vers un ménage à plusieurs? M. Defoort, T. Floquet et W. Perruquetti LAGIS UMR CNRS 8146, Ecole Centrale de Lille, Villeneuve d Ascq. [email protected] 10 Novembre 2006

2 PLAN Introduction 1 Introduction
3 Projet Robocoop : http ://syner.ec-lille.fr/robocoop Objectif Déploiement de flottilles d agents autonomes ou semi-autonomes

4 Challenges Informations/décisions locales Communications limitées, Opération à grande échelle, Environnement dynamique incertain et parfois hostile,... Recherche pluridisciplinaire : Modélisation, planification et commande (contraintes, modèle non linéaires, retards, hiérarchisation, aspects hybrides... ) théorie des graphes, protocole de communication, logique et décision,...

5 Challenges Informations/décisions locales Communications limitées, Opération à grande échelle, Environnement dynamique incertain et parfois hostile,... Recherche pluridisciplinaire : Modélisation, planification et commande (contraintes, modèle non linéaires, retards, hiérarchisation, aspects hybrides... ) théorie des graphes, protocole de communication, logique et décision,...

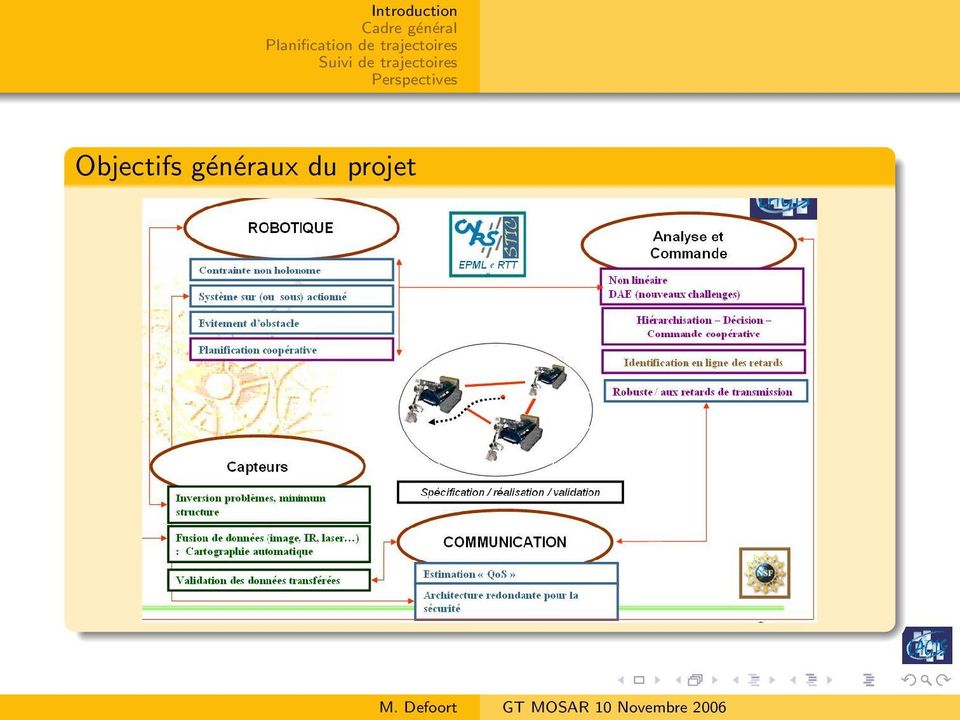
6 Objectifs généraux du projet
7 Domaines d application Santé (chirurgie télé-opérée,... ) Transport (autoroute automobile, drone, satellites,... )

8 Leader(s)? Graphe Modèles Leader ou pas? Certains véhicules jouent parfois un rôle particulier : les leaders. Distinction entre 2 types d architecture : 1 avec leader : le leader dirige tout ou partie de la flottille. 2 sans leader : besoin d une coordination locale/globale : des règles de décision doivent utiliser des informations locales (informations échangées avec les véhicules voisins) ou des informations globales

9 Leader(s)? Graphe Modèles Leader ou pas? Certains véhicules jouent parfois un rôle particulier : les leaders. Distinction entre 2 types d architecture : 1 avec leader : le leader dirige tout ou partie de la flottille. 2 sans leader : besoin d une coordination locale/globale : des règles de décision doivent utiliser des informations locales (informations échangées avec les véhicules voisins) ou des informations globales

10 Leader(s)? Graphe Modèles Graphes Deux graphes sont nécessaires pour définir un groupe de N robots : 1 le graphe des communications entre robots : G c, 2 le graphe de formation (caractérise la géométrie de la formation) : G f. Definition Le graphe de communication G c = (R, A) (respectivement graphe de formation G f = (R, A, W )) est un graphe orienté (respectivement un graphe pondéré) où R = {R 1,..., R N } représente une liste de noeuds et A une liste d arcs orientés (respectivement d arcs pondérés de poids associés à W ).
 (respectivement graphe de formation G f = (R, A, W )) est un graphe orienté")
11 Leader(s)? Graphe Modèles Graphes Deux graphes sont nécessaires pour définir un groupe de N robots : 1 le graphe des communications entre robots : G c, 2 le graphe de formation (caractérise la géométrie de la formation) : G f. Definition Le graphe de communication G c = (R, A) (respectivement graphe de formation G f = (R, A, W )) est un graphe orienté (respectivement un graphe pondéré) où R = {R 1,..., R N } représente une liste de noeuds et A une liste d arcs orientés (respectivement d arcs pondérés de poids associés à W ).
 (respectivement graphe de formation G f = (R, A, W )) est un graphe orienté")
12 Leader(s)? Graphe Modèles Graphes Deux graphes sont nécessaires pour définir un groupe de N robots : 1 le graphe des communications entre robots : G c, 2 le graphe de formation (caractérise la géométrie de la formation) : G f. Definition Le graphe de communication G c = (R, A) (respectivement graphe de formation G f = (R, A, W )) est un graphe orienté (respectivement un graphe pondéré) où R = {R 1,..., R N } représente une liste de noeuds et A une liste d arcs orientés (respectivement d arcs pondérés de poids associés à W ).
 (respectivement graphe de formation G f = (R, A, W )) est un graphe orienté")
13 Leader(s)? Graphe Modèles Exemple de graphe de communication G c R 0 = L R 2 R 1 R 3 R 7 R 5 R 4 R 6

14 d 25 d 15 Introduction Leader(s)? Graphe Modèles Exemple de graphe de formation G f d 02 R 0 = L R 2 d 01 d 23 d 12 R 1 d(r 0, R7) = d 07 > 0 d 17 R 3 R 7 d 35 R 5 d 57 d 34 d 45 d 56 d 67 R 4 R 6

15 Leader(s)? Graphe Modèles Remarque G c : un arc unidirectionnel (resp. bi-directionnel) reliant deux noeuds signifie qu il existe une liaison de communication unidirectionnelle (resp. bi-directionnelle) entre les deux robots G f : un arc reliant deux noeuds signifie qu il existe une contrainte géométrique (reliée à d ij = q i q j ) dont le poids associé, p ij est 1 une constante si la contrainte est rigide, 2 un intervalle si la contrainte est flexible. G f et G c sont fortement corrélés : par exemple si la communication est wifi alors la qualité de la communication est une fonction de la distance entre l émetteur et le récepteur. Le maintien de G f est nécessaire pour assurer une communication de qualité entre les robots

16 Leader(s)? Graphe Modèles Remarque G c : un arc unidirectionnel (resp. bi-directionnel) reliant deux noeuds signifie qu il existe une liaison de communication unidirectionnelle (resp. bi-directionnelle) entre les deux robots G f : un arc reliant deux noeuds signifie qu il existe une contrainte géométrique (reliée à d ij = q i q j ) dont le poids associé, p ij est 1 une constante si la contrainte est rigide, 2 un intervalle si la contrainte est flexible. G f et G c sont fortement corrélés : par exemple si la communication est wifi alors la qualité de la communication est une fonction de la distance entre l émetteur et le récepteur. Le maintien de G f est nécessaire pour assurer une communication de qualité entre les robots

17 Leader(s)? Graphe Modèles Remarque G c : un arc unidirectionnel (resp. bi-directionnel) reliant deux noeuds signifie qu il existe une liaison de communication unidirectionnelle (resp. bi-directionnelle) entre les deux robots G f : un arc reliant deux noeuds signifie qu il existe une contrainte géométrique (reliée à d ij = q i q j ) dont le poids associé, p ij est 1 une constante si la contrainte est rigide, 2 un intervalle si la contrainte est flexible. G f et G c sont fortement corrélés : par exemple si la communication est wifi alors la qualité de la communication est une fonction de la distance entre l émetteur et le récepteur. Le maintien de G f est nécessaire pour assurer une communication de qualité entre les robots

18 Leader(s)? Graphe Modèles Remarque G c : un arc unidirectionnel (resp. bi-directionnel) reliant deux noeuds signifie qu il existe une liaison de communication unidirectionnelle (resp. bi-directionnelle) entre les deux robots G f : un arc reliant deux noeuds signifie qu il existe une contrainte géométrique (reliée à d ij = q i q j ) dont le poids associé, p ij est 1 une constante si la contrainte est rigide, 2 un intervalle si la contrainte est flexible. G f et G c sont fortement corrélés : par exemple si la communication est wifi alors la qualité de la communication est une fonction de la distance entre l émetteur et le récepteur. Le maintien de G f est nécessaire pour assurer une communication de qualité entre les robots

19 Leader(s)? Graphe Modèles Definition La matrice de communication associée au graphe de communications est une matrice carré M c = (m c ij ) N N définie par : { m c 1 si l arc Ri R ij = j A. 0 sinon De la même manière la matrice de formation associée au graphe de formation est une matrice carré M f = (m f ij ) N N avec { m f ij = pij si l arc R i R j A 0 sinon. Pour une contrainte rigide, p ij est une constante alors que pour une contrainte flexible c est un intervalle : généralement M f est une matrice intervalle.
 N N avec")
20 Leader(s)? Graphe Modèles Definition La matrice de communication associée au graphe de communications est une matrice carré M c = (m c ij ) N N définie par : { m c 1 si l arc Ri R ij = j A. 0 sinon De la même manière la matrice de formation associée au graphe de formation est une matrice carré M f = (m f ij ) N N avec { m f ij = pij si l arc R i R j A 0 sinon. Pour une contrainte rigide, p ij est une constante alors que pour une contrainte flexible c est un intervalle : généralement M f est une matrice intervalle.
 N N avec")
21 Leader(s)? Graphe Modèles Cas particulier : architecture de type leader-suiveur Architecture de type leader-suiveur Pour le graphe orienté G c, le père d un noeud est son leader. La racine R 1 est le leader de la formation. Il dirige l ensemble de la flottille. La matrice M c est définie telle que m c ij = 1 lorsque R j suit R i (le robot R j suit la trajectoire déterminée par R i ). La formation de N robots est caractérisée par un leader R 1 et une cascade de N 1 paires de leader-suiveurs (R i -R j ).
22 Leader(s)? Graphe Modèles Modèles 1 Modèle cinématique (contraintes de non holonomie) Posture Kinematic Model (PKM) : modèle simplifié qui donne une description globale du robot (généralement utilisé pour la commande). Position =(x, y, θ) dans la plupart des cas. Configuration Kinematic Model (CKM) : toutes les variables de configuration (position + position angulaire des roues,... ). 2 Modèle dynamique (idem + dynamique des actionneurs (moteurs électriques)) Configuration Dynamic Model (CDM) : inclue les dynamiques des robots mobiles (force et couple générés par les actionneurs) Posture Dynamic Model (PDM) : idem pour CKM.
23 Leader(s)? Graphe Modèles Modèles 1 Modèle cinématique (contraintes de non holonomie) Posture Kinematic Model (PKM) : modèle simplifié qui donne une description globale du robot (généralement utilisé pour la commande). Position =(x, y, θ) dans la plupart des cas. Configuration Kinematic Model (CKM) : toutes les variables de configuration (position + position angulaire des roues,... ). 2 Modèle dynamique (idem + dynamique des actionneurs (moteurs électriques)) Configuration Dynamic Model (CDM) : inclue les dynamiques des robots mobiles (force et couple générés par les actionneurs) Posture Dynamic Model (PDM) : idem pour CKM.
24 Leader(s)? Graphe Modèles La platitude : une notion clé (M. Fliess, J. Lévine, Ph. Martin, et P. Rouchon) Pour les systèmes linéaire ẋ = Ax + Bu les notions suivantes sont équivalentes : 1 Commandabilité, 2 Forme normale de Brunovsky, 3 La paramétrisation des variables d état et des entrées par m sorties (sorties de Brunovsky ou sorties plates).
25 Leader(s)? Graphe Modèles La platitude : une notion clé Le système ẋ = f(x, u), x R n, u R m, est plat s il existe m sorties dépendant de l état, des entrées et d un certain nombre de leur dérivées jusqu à l ordre r n (sorties plates) de telle sorte que les variables d état et les sorties peuvent être exprimées en fonction des sorties plates. Il existe trois fonctions telle que y = h(x, u, u, ü,..., u (r) ), x = χ(y, ẏ,..., y (r 1) ), u = ϑ(y, ẏ,..., y (r) ).
26 Leader(s)? Graphe Modèles Théorème Tout systèmes non linéaires de la forme ẋ = B(x)u avec m entrées et au plus m + 2 états est plat. Conclusion Les modèles PKM et PDM sont plats. Ils sont commandables. Cependant, d après le théorème de Brockett, ils ne sont pas stabilisables par retour d état continu et stationnaire.
27 Leader(s)? Graphe Modèles Modèle cinématique 1 Modèle de type unicycle ẋ = v cos θ Y-AXIS w v n n (x n,y n ) ẏ = v sin θ θ = w 2 Modèle de type voiture ẋ = v cos θ θ n X - AXIS ẏ = v sin θ θ = v tan(φ) l φ = w
28 Leader(s)? Graphe Modèles Modèle cinématique : plat Sorties plates : (x, y). ( ) 1 pour l unicycle : θ = arctan ẏ ( 2 pour la voiture : θ = arctan ẏ ẋ ( ẋÿ ẏẍ arctan l, w = φ. (ẋ 2 +ẏ 2 ) 3/2 ) ẋ, v = ± ẋ 2 + ẏ 2,w = ẋÿ ẏẍ ẋ 2 +ẏ 2 ), v = ± ẋ 2 + ẏ 2, φ =
29 Objectifs Problème de commande optimale Transformation en problème de programmation non linéaire Algorithme décentralisé de planification Dans les cas avec ou sans leaders, la planification de trajectoire pour un robot de la flottille ne dépend que des informations locales échangées avec les robots voisins. Afin d obtenir une trajectoire faisable pour le ième robot (connaissant sa configuration et les informations locales des voisins) : on utilise la ième ligne de G c ou G f. Exemple 2 R2 2 R3 R4 1 3 R1 R5 4 R6 1 R0 2 R7 3
30 Objectifs Problème de commande optimale Transformation en problème de programmation non linéaire Objectif Générer une trajectoire (sous)-optimale satisfaisant les contraintes : physiques (vitesse et accélération maximales des robots) sur la géométrie de la formation, évitement d obstacles, évitement de collisions entre robots, les conditions aux bords, sur les distances entre robots induites par les limites de communication autres : contraintes sur le temps (missions de sauvetage), sur la consommation d énergie (limites induites par les batteries,... )
31 Objectifs Problème de commande optimale Transformation en problème de programmation non linéaire Objectif Générer une trajectoire (sous)-optimale satisfaisant les contraintes : physiques (vitesse et accélération maximales des robots) sur la géométrie de la formation, évitement d obstacles, évitement de collisions entre robots, les conditions aux bords, sur les distances entre robots induites par les limites de communication autres : contraintes sur le temps (missions de sauvetage), sur la consommation d énergie (limites induites par les batteries,... )
32 Objectifs Problème de commande optimale Transformation en problème de programmation non linéaire Objectif Générer une trajectoire (sous)-optimale satisfaisant les contraintes : physiques (vitesse et accélération maximales des robots) sur la géométrie de la formation, évitement d obstacles, évitement de collisions entre robots, les conditions aux bords, sur les distances entre robots induites par les limites de communication autres : contraintes sur le temps (missions de sauvetage), sur la consommation d énergie (limites induites par les batteries,... )
33 Objectifs Problème de commande optimale Transformation en problème de programmation non linéaire Objectif Générer une trajectoire (sous)-optimale satisfaisant les contraintes : physiques (vitesse et accélération maximales des robots) sur la géométrie de la formation, évitement d obstacles, évitement de collisions entre robots, les conditions aux bords, sur les distances entre robots induites par les limites de communication autres : contraintes sur le temps (missions de sauvetage), sur la consommation d énergie (limites induites par les batteries,... )
34 Objectifs Problème de commande optimale Transformation en problème de programmation non linéaire Objectif Générer une trajectoire (sous)-optimale satisfaisant les contraintes : physiques (vitesse et accélération maximales des robots) sur la géométrie de la formation, évitement d obstacles, évitement de collisions entre robots, les conditions aux bords, sur les distances entre robots induites par les limites de communication autres : contraintes sur le temps (missions de sauvetage), sur la consommation d énergie (limites induites par les batteries,... )
35 Objectifs Problème de commande optimale Transformation en problème de programmation non linéaire Objectif Générer une trajectoire (sous)-optimale satisfaisant les contraintes : physiques (vitesse et accélération maximales des robots) sur la géométrie de la formation, évitement d obstacles, évitement de collisions entre robots, les conditions aux bords, sur les distances entre robots induites par les limites de communication autres : contraintes sur le temps (missions de sauvetage), sur la consommation d énergie (limites induites par les batteries,... )
36 Objectifs Problème de commande optimale Transformation en problème de programmation non linéaire Objectif Générer une trajectoire (sous)-optimale satisfaisant les contraintes : physiques (vitesse et accélération maximales des robots) sur la géométrie de la formation, évitement d obstacles, évitement de collisions entre robots, les conditions aux bords, sur les distances entre robots induites par les limites de communication autres : contraintes sur le temps (missions de sauvetage), sur la consommation d énergie (limites induites par les batteries,... )
37 Objectifs Problème de commande optimale Transformation en problème de programmation non linéaire Objectif Générer une trajectoire (sous)-optimale satisfaisant les contraintes : physiques (vitesse et accélération maximales des robots) sur la géométrie de la formation, évitement d obstacles, évitement de collisions entre robots, les conditions aux bords, sur les distances entre robots induites par les limites de communication autres : contraintes sur le temps (missions de sauvetage), sur la consommation d énergie (limites induites par les batteries,... )
38 Objectifs Problème de commande optimale Transformation en problème de programmation non linéaire Planification de trajectoire BUT : Pour chaque robot, déterminer la trajectoire et la commande qui minimisent la fonctionnelle J = tf t 0 C(X 1,..., X v, U 1,..., U v )dt, t 0 est l instant initial (supposé nul), t f est le temps final fixé ou inconnu a et C est la fonction coût. Les trajectoires doivent joindre les conditions terminales (initiales et finales) a planification en temps optimal
39 Objectifs Problème de commande optimale Transformation en problème de programmation non linéaire Planification de trajectoire En satisfaisant les contraintes : 1 bornes sur les vitesses : S 1 n = U max n U n 0 2 évitement de collision avec les obstacles (union de domaines circulaires de centre (x o m, y o m) et de rayon r o m) : S 2 nm = d(a n, O m ) 2 (r n + r o m) évitement de collision entre les robots : S 3 nn = d(a n, A n ) 2 (r n + r n ) distances maximales entre les robots qui communiquent : S 4 nn = d2 max d(a n, A n ) 2 0.
40 Objectifs Problème de commande optimale Transformation en problème de programmation non linéaire Planification de trajectoire En satisfaisant les contraintes : 1 bornes sur les vitesses : S 1 n = U max n U n 0 2 évitement de collision avec les obstacles (union de domaines circulaires de centre (x o m, y o m) et de rayon r o m) : S 2 nm = d(a n, O m ) 2 (r n + r o m) évitement de collision entre les robots : S 3 nn = d(a n, A n ) 2 (r n + r n ) distances maximales entre les robots qui communiquent : S 4 nn = d2 max d(a n, A n ) 2 0.
41 Objectifs Problème de commande optimale Transformation en problème de programmation non linéaire Planification de trajectoire En satisfaisant les contraintes : 1 bornes sur les vitesses : S 1 n = U max n U n 0 2 évitement de collision avec les obstacles (union de domaines circulaires de centre (x o m, y o m) et de rayon r o m) : S 2 nm = d(a n, O m ) 2 (r n + r o m) évitement de collision entre les robots : S 3 nn = d(a n, A n ) 2 (r n + r n ) distances maximales entre les robots qui communiquent : S 4 nn = d2 max d(a n, A n ) 2 0.
42 Objectifs Problème de commande optimale Transformation en problème de programmation non linéaire Planification de trajectoire En satisfaisant les contraintes : 1 bornes sur les vitesses : S 1 n = U max n U n 0 2 évitement de collision avec les obstacles (union de domaines circulaires de centre (x o m, y o m) et de rayon r o m) : S 2 nm = d(a n, O m ) 2 (r n + r o m) évitement de collision entre les robots : S 3 nn = d(a n, A n ) 2 (r n + r n ) distances maximales entre les robots qui communiquent : S 4 nn = d2 max d(a n, A n ) 2 0.
43 Objectifs Problème de commande optimale Transformation en problème de programmation non linéaire Planification de trajectoire En satisfaisant les contraintes : 1 bornes sur les vitesses : S 1 n = U max n U n 0 2 évitement de collision avec les obstacles (union de domaines circulaires de centre (x o m, y o m) et de rayon r o m) : S 2 nm = d(a n, O m ) 2 (r n + r o m) évitement de collision entre les robots : S 3 nn = d(a n, A n ) 2 (r n + r n ) distances maximales entre les robots qui communiquent : S 4 nn = d2 max d(a n, A n ) 2 0.
44 Objectifs Problème de commande optimale Transformation en problème de programmation non linéaire Pénalité Transformation du problème d optimisation sous contraintes par : J p = tf tf + 0 tf + 0 t 0 C(X 1,..., X N, U 1,..., U N )dt + N N o n=1 m=1 N n=1 n =1 n n { µ 2 nm Ω(S 2 nm) } dt + tf N { µ 4 nn Ω(Snn 4 )} dt. 0 tf t 0 N N n=1 n=1 n =1 n n { µ 1 n Ω ( Sn 1 )} dt N { µ 3 nn Ω ( Snn 3 )} dt La fonction pénalité Ω pénalise la fonction coût lorsque la contrainte est violée
45 Objectifs Problème de commande optimale Transformation en problème de programmation non linéaire La platitude est de retour Transformation du coût et des contraintes en utilisation les sorties plates et un nombre fini de leur dérivées J p = tf 0 L(Z(t), Ż(t),..., Z(r) (t))dt. Elimination des contraintes dynamiques
46 Objectifs Problème de commande optimale Transformation en problème de programmation non linéaire Sur le chemin de la programmation non linéaire Paramétrisation des sorties plates x n (t k ) = x n,initial (t k ) + y n (t k ) = y n,initial (t k ) + Le problème devient : P a 1n,j N j,2 (t k ) j=1 P a 2n,j N j,2 (t k ) j=1 tf min L(Z(t), Ż(t),..., a Z(r) (t))dt. in,j 0
47 Objectifs Problème de commande optimale Transformation en problème de programmation non linéaire Sur le chemin de la programmation non linéaire Choix des fonctions de base : les B splines Première utilisation dans Milam et al y f (t) = T N i,2 (t)a i i=1 Q = {q 1 =... = q k = t 0 q k+1 = t 1 q k+p =... = q T = t P = t f.} σ = {t 0 t t P 1... t P = t f}
48 Objectifs Problème de commande optimale Transformation en problème de programmation non linéaire Propriétés des B splines 1 Support compact. Les fonctions N i,d sont nulles en dehors des intervalles [q i, q i+d+1 ] impact uniquement autour du point considéré : intérêt pour l implémentation numérique car la méthode de descente de gradient est simplifiée par la matrice hessienne quasiment creuse, i.e la plupart des entrées sont nulles. 2 N i,d (t) fonction polynomiale par rapport à la variable t d ordre d. 3 N i,d (t) 0, d, i, t. 4 Facilement différentiable (degré de continuité des B splines peut facilement être choisi).
49 Objectifs Problème de commande optimale Transformation en problème de programmation non linéaire Résolution On subdivise le temps en intervalles Problème de programmation non linéaire min a in,j N sample k=1 σ k L(Z(t k ), Ż(t k),..., Z (r) (t k )) où les poids σ k et les instants t k sont choisis par différentes méthodes (trapézoidale, rectangle, Gauss-Legendre,... ). Optimisation directe des coefficients par descente de gradient A l aide des propriétés de platitude, on déduit les commandes en boucle ouverte du système.
50 Motivations Solution 1 : Suivi individuel Solution 2 : Suivi coopératif Simulation pour une flottille complexe Motivation : Tout va bien?? Plus ou moins... Résultats expérimentaux sur le système en boucle ouverte
51 Motivations Solution 1 : Suivi individuel Solution 2 : Suivi coopératif Simulation pour une flottille complexe Motivation : Tout va bien?? Plus ou moins... Le modèle unicycle est perturbé... avec des π Mais que se passe t il lors de la présence de bruits de mesure ou de glissement?? (qui peuvent apparaître lorsque le contact entre la roue et la route n est pas maintenu... ) ẋ i = v i cos θ i + π 1,i ẏ i = v i sin θ i + π 2,i θ i = w i + π 3,i π 1,i, π 2,i, π 3,i sont des perturbations additives inconnues. Question Help! Comment faire face à ces perturbations?
52 Solution 1 : Suivi individuel Motivations Solution 1 : Suivi individuel Solution 2 : Suivi coopératif Simulation pour une flottille complexe Suivi individuel de la trajectoire planifiée pour chaque robot R i, i = 1,..., N. Trajectoire de référence planifiée ẋ i = v i cos θ i ẏ i = v i sin θ i θ i = w i
53 Motivations Solution 1 : Suivi individuel Solution 2 : Suivi coopératif Simulation pour une flottille complexe Erreurs de suivi : x i = x i x i ŷ i = y i y i θ i = θ i θ i Objectifs de la commande Determiner la commande u i = [v i, w i ] T telle que les erreurs de suivi x i, ŷ i et θ i soient globalement asymptotiquement stables malgré les erreurs initiales et les perturbations.
54 Motivations Solution 1 : Suivi individuel Solution 2 : Suivi coopératif Simulation pour une flottille complexe Difficultés pour commander un robot de type unicycle Provient de la contrainte de non holonomie imposée par les roues : Condition nécessaire de Brockett pour la stabilisation = PKM and PDM ne peuvent pas être stabilisés asymptotiquement par un retour d état continu et stationnaire (qui ne dépend pas du temps). Solution { v = v(x, y, θ, t) Retour d état qui dépend du temps : w = w(x, y, θ, t) { v = vdisc (x, y, θ) Commande discontinue : w = w disc (x, y, θ)
55 Motivations Solution 1 : Suivi individuel Solution 2 : Suivi coopératif Simulation pour une flottille complexe Difficultés pour commander un robot de type unicycle Provient de la contrainte de non holonomie imposée par les roues : Condition nécessaire de Brockett pour la stabilisation = PKM and PDM ne peuvent pas être stabilisés asymptotiquement par un retour d état continu et stationnaire (qui ne dépend pas du temps). Solution { v = v(x, y, θ, t) Retour d état qui dépend du temps : w = w(x, y, θ, t) { v = vdisc (x, y, θ) Commande discontinue : w = w disc (x, y, θ)
56 Motivations Solution 1 : Suivi individuel Solution 2 : Suivi coopératif Simulation pour une flottille complexe Dynamique de l erreur de suivi dans le référentiel robot : x e cos θ sin θ 0 x y e = sin θ cos θ 0 ŷ θ e θ ẋ e ẏ e θ e = v cos θ e v sin θ e w 1 y e + 0 x e 0 1 [ v w ].
57 Motivations Solution 1 : Suivi individuel Solution 2 : Suivi coopératif Simulation pour une flottille complexe Retour d état dépendant du temps borné Prend en compte les limitations des actionneurs : [ ] v(t) = v cos θ e + a 3 tanh x e a w(t) w + 1 vy e sin θ e (1 + x 2 e + ye) 2 + a θ 2 tanh θ e e a i sont des constantes positives choisies de manière à respecter les limitations des actionneurs : v v + a 3 w w + a 1 2 v + a 2
58 Motivations Solution 1 : Suivi individuel Solution 2 : Suivi coopératif Simulation pour une flottille complexe Preuve Démonstration à partir de la fonction de Lyapunov candidate suivante V = a 1 2 ln(1 + x2 e + y 2 e) θ2 e V 0 Lemme de Barbalat Stabilisation asymptotique des erreurs de suivi
59 Résultats Introduction Motivations Solution 1 : Suivi individuel Solution 2 : Suivi coopératif Simulation pour une flottille complexe Résultats (Commandes bornées mais en réel peu robuste aux perturbations!!!)
60 Solution 1 Introduction Motivations Solution 1 : Suivi individuel Solution 2 : Suivi coopératif Simulation pour une flottille complexe Idée Extension des résultats précédents pour augmenter la qualité du suivi en présence de perturbations (bruits de mesure, variations de paramètres) Utilisation de la commande par mode glissant intégral.
61 Solution 1 Mode glissant : principe Introduction Motivations Solution 1 : Suivi individuel Solution 2 : Suivi coopératif Simulation pour une flottille complexe Position du problème Considérons un système non linéaire où x R n et u R n : ẋ = f(x) + g(x)u + h(t, x) la perturbation vérifie la condition matching : h(t, x) spang(x) la perturbation est bornée par une fonction scalaire connue : h(t, x) Π(t, x)
62 Solution 1 Mode glissant : principe Introduction Motivations Solution 1 : Suivi individuel Solution 2 : Suivi coopératif Simulation pour une flottille complexe Synthèse Une surface s = s(x, t) = 0 est déterminée en fonction des objectifs de commande Une loi de commande discontinue est synthétisée de manière à contraindre les trajectoires du système à atteindre et, ensuite, à rester sur cette surface.
63 Solution 1 Mode glissant : avantage et inconvénients Motivations Solution 1 : Suivi individuel Solution 2 : Suivi coopératif Simulation pour une flottille complexe Avantages Insensibilité aux perturbations (matching perturbations) Diminution de l ordre Le choix de la surface s(x, t) = 0 permet de fixer a priori la dynamique du système bouclé Inconvénients Phénomène de chattering Les trajectoires solutions ne sont pas robustes vis à vis des incertitudes pendant la phase précédent le glissement (phase d accrochage)
64 Solution 1 Mode glissant : avantage et inconvénients Motivations Solution 1 : Suivi individuel Solution 2 : Suivi coopératif Simulation pour une flottille complexe Avantages Insensibilité aux perturbations (matching perturbations) Diminution de l ordre Le choix de la surface s(x, t) = 0 permet de fixer a priori la dynamique du système bouclé Inconvénients Phénomène de chattering Les trajectoires solutions ne sont pas robustes vis à vis des incertitudes pendant la phase précédent le glissement (phase d accrochage)
65 Solution 1 Mode glissant intégral : principe Motivations Solution 1 : Suivi individuel Solution 2 : Suivi coopératif Simulation pour une flottille complexe Philosophie du mode glissant intégral Eliminer la phase d accrochage en forçant le régime glissant durant toute la réponse du système. La commande équivalente de u 1 (notée u 1eq ), caractérisant la dynamique du système en mode glissant, doit satisfaire la condition suivante : g(x)u 1eq = h.
66 Solution 1 Mode glissant intégral : principe Motivations Solution 1 : Suivi individuel Solution 2 : Suivi coopératif Simulation pour une flottille complexe Philosophie du mode glissant intégral Eliminer la phase d accrochage en forçant le régime glissant durant toute la réponse du système. La commande équivalente de u 1 (notée u 1eq ), caractérisant la dynamique du système en mode glissant, doit satisfaire la condition suivante : g(x)u 1eq = h.
67 Solution 1 Mode glissant intégral : principe Motivations Solution 1 : Suivi individuel Solution 2 : Suivi coopératif Simulation pour une flottille complexe Principe La loi de commande se décompose en 2 parties : u = u 0 + u 1 u 0 la commande nominale u 1 la commande discontinue permettant de rejeter les perturbations h(t, x)
68 Solution 1 Mode glissant intégral : principe Motivations Solution 1 : Suivi individuel Solution 2 : Suivi coopératif Simulation pour une flottille complexe Principe La loi de commande se décompose en 2 parties : u = u 0 + u 1 u 0 la commande nominale u 1 la commande discontinue permettant de rejeter les perturbations h(t, x)
69 Solution 1 Mode glissant intégral : principe Motivations Solution 1 : Suivi individuel Solution 2 : Suivi coopératif Simulation pour une flottille complexe Principe La loi de commande se décompose en 2 parties : u = u 0 + u 1 u 0 la commande nominale u 1 la commande discontinue permettant de rejeter les perturbations h(t, x)
70 Solution 1 Mode glissant intégral : principe Motivations Solution 1 : Suivi individuel Solution 2 : Suivi coopératif Simulation pour une flottille complexe Commande nominale La commande nominale u 0 (x) est construite de manière à ce que le système non perturbé soit globalement asymptotiquement stable. Le système bouclé nominal s écrit : ẋ 0 = f(x 0 ) + g(x 0 )u 0 x 0 est la trajectoire du système sous la commande u 0
71 Solution 1 Mode glissant intégral : principe Motivations Solution 1 : Suivi individuel Solution 2 : Suivi coopératif Simulation pour une flottille complexe Construction de la variable glissante s = s 0 + z s 0 : est une combinaison linéaire de l état z : induit l appellation intégrale et fournit un degré de liberté supplémentaire dans la construction de la surface de glissement.
72 Solution 1 Mode glissant intégral : principe Motivations Solution 1 : Suivi individuel Solution 2 : Suivi coopératif Simulation pour une flottille complexe Construction de la variable glissante s = s 0 + z s 0 : est une combinaison linéaire de l état z : induit l appellation intégrale et fournit un degré de liberté supplémentaire dans la construction de la surface de glissement.
73 Solution 1 Mode glissant intégral : principe Motivations Solution 1 : Suivi individuel Solution 2 : Suivi coopératif Simulation pour une flottille complexe Construction de la variable glissante s = s 0 + z s 0 : est une combinaison linéaire de l état z : induit l appellation intégrale et fournit un degré de liberté supplémentaire dans la construction de la surface de glissement.
74 Solution 1 Mode glissant intégral : principe Motivations Solution 1 : Suivi individuel Solution 2 : Suivi coopératif Simulation pour une flottille complexe Idée Calculer z de telle sorte que u 1 rejette la perturbation h dès l instant initial. ṡ = ṡ 0 + ż = s 0 x (f(x) + g(x)u 0(x) + g(x)u 1 + h(t, x)) + ż = 0 Pour être sur la surface glissante s = 0 (t 0), on doit satisfaire : ż = s 0 x (f(x) + g(x)u 0(x)) z(0) = s 0 (x(0))
75 Solution 1 Mode glissant intégral : principe Motivations Solution 1 : Suivi individuel Solution 2 : Suivi coopératif Simulation pour une flottille complexe Idée Calculer z de telle sorte que u 1 rejette la perturbation h dès l instant initial. ṡ = ṡ 0 + ż = s 0 x (f(x) + g(x)u 0(x) + g(x)u 1 + h(t, x)) + ż = 0 Pour être sur la surface glissante s = 0 (t 0), on doit satisfaire : ż = s 0 x (f(x) + g(x)u 0(x)) z(0) = s 0 (x(0))
76 Solution 1 Mode glissant intégral : principe Motivations Solution 1 : Suivi individuel Solution 2 : Suivi coopératif Simulation pour une flottille complexe Mode glissant intégral La commande discontinue u 1 est définie pour assurer le mode glissant le long de la surface glissante via la fonction discontinue suivante : u 1 = M(x)sign(s) Ainsi, la dynamique du système en mode glissant est ẋ = f(x) + g(x)u 0 (x) qui est exactement la même que pour le système nominal.
77 Solution 1 Mode glissant intégral : principe Motivations Solution 1 : Suivi individuel Solution 2 : Suivi coopératif Simulation pour une flottille complexe Mode glissant intégral La commande discontinue u 1 est définie pour assurer le mode glissant le long de la surface glissante via la fonction discontinue suivante : u 1 = M(x)sign(s) Ainsi, la dynamique du système en mode glissant est ẋ = f(x) + g(x)u 0 (x) qui est exactement la même que pour le système nominal.
78 Solution 1 Mode glissant intégral : principe Motivations Solution 1 : Suivi individuel Solution 2 : Suivi coopératif Simulation pour une flottille complexe Preuve Fonction candidate Dérivée : V = s T s V ɛ V Temps fini Avantages Elimination de la phase d accrochage Les propriétés de robustesse sont garanties dès l instant initial
79 Résultats Integral sliding mode control Introduction Motivations Solution 1 : Suivi individuel Solution 2 : Suivi coopératif Simulation pour une flottille complexe y (dm) x (dm) Performance avec la commande idéale (dashed : reference, solid : actual model)
80 Résultats Introduction Motivations Solution 1 : Suivi individuel Solution 2 : Suivi coopératif Simulation pour une flottille complexe Suivi de trajectoire avec la commande par mode glissant intégral. y (dm) (a) x (dm) (a) x-y plot (dashed : reference, solid : actual model)
81 Résultats Introduction Motivations Solution 1 : Suivi individuel Solution 2 : Suivi coopératif Simulation pour une flottille complexe Evolution des erreurs de suivi 6 (b) 8 (c) e x e y t t (b) Erreur e x (dm). (c) Erreur e y (dm) (d) e θ t (d) Erreur e θ (degree).
82 Résultats Introduction Motivations Solution 1 : Suivi individuel Solution 2 : Suivi coopératif Simulation pour une flottille complexe Evolution des commandes. 6 (e) 5 4 u v 0.5 (f) t (e) Vitesse linéaire u(dm/s) t (f) Vitesse angulaire w(rad/s)
83 Solution 2 : Suivi coopératif Motivations Solution 1 : Suivi individuel Solution 2 : Suivi coopératif Simulation pour une flottille complexe Motivations Réduction de la tâche de planification pour la flottille. Assurer la coordination des robots par l utilisation d une loi de commande appropriée Maintenir la forme géométrique de la flottille durant la manoeuvre (cas d une formation géométrique fixe) Garantir la non collision entre les robots malgré les incertitudes Décentraliser l information
84 Motivations Solution 1 : Suivi individuel Solution 2 : Suivi coopératif Simulation pour une flottille complexe Modélisation de l architecture de type meneur-suiveur Expression de l état du robot suiveur R j en fonction de ses coordonnées relatives par rapport à R i (coordonnées polaires realtives) : distance de séparation l ij = (x i x j d cos θ j ) 2 + (y i y j d sin θ j ) 2 angle relatif ( ) yi + y j + d sin θ j ψ ij = π θ i arctan x i x j d cos θ j
85 Motivations Solution 1 : Suivi individuel Solution 2 : Suivi coopératif Simulation pour une flottille complexe
86 Dynamique du suiveur Motivations Solution 1 : Suivi individuel Solution 2 : Suivi coopératif Simulation pour une flottille complexe { ḣij = G ij (h ij, θ j )u j + F ij (h ij )u i + P ij (h ij, θ j ) avec θ j = w j h ij = [l ij, ψ ij ] T, γ ij = ψ ij + θ i θ j G ij = cos γ ij d sin γ ij sin γ ij d cos γ ij, F ij = cos(ψ ij) 0 sin ψ ij 1 l ij l ij l ij P ij perturbations inconnues : u i commande du robot leader R i
87 Commande des robots suiveurs Motivations Solution 1 : Suivi individuel Solution 2 : Suivi coopératif Simulation pour une flottille complexe Objectif Trouver une loi de commande garantissant le suivi robuste de la configuration constante désirée l ij, ψ ij. Stabiliser les erreurs de suivi : (l ij l ij, ψ ij ψ ij ) malgré les perturbations. Pré feedback u j = G 1 ij (ũ ideal,j + ũ disc,j )
88 Motivations Solution 1 : Suivi individuel Solution 2 : Suivi coopératif Simulation pour une flottille complexe Solution basée sur la commande par mode glissant intégral Terme continu ũ ideal,j = [ ] µj (l ij l ij ) ν j (ψ ij ψ ij ) Terme discontinu ũ disc,j = b j Sign(s j ) Surface de glissement s j = e ij (t) t 0 ũ ideal,j (s)ds e ij (0)
89 Motivations Solution 1 : Suivi individuel Solution 2 : Suivi coopératif Simulation pour une flottille complexe Solution basée sur la commande par mode glissant intégral Théorème Le contrôleur ũ j = ũ ideal,j + ũ disc,j. assure que les erreurs de suivi sont globalement asymptotiquement stables et assure l évitement de collision durant la phase de transition puisque la phase d accrochage est éliminée.
90 Motivations Solution 1 : Suivi individuel Solution 2 : Suivi coopératif Simulation pour une flottille complexe Simulation pour deux robots mobiles R 1 doit suivre une trajectoire circulaire malgré les erreurs de localisation et les perturbations. R 2 doit suivre R 1 en maintenant la formation. Forme géométrique désirée : l 12 = 6m ψ 12 = π 4.
91 Résultats pour 2 robots Motivations Solution 1 : Suivi individuel Solution 2 : Suivi coopératif Simulation pour une flottille complexe erreur e x,1 e y,1 e θ,1 erreur sur la formation d l l12 12 d ψ ψ t (s) t(s) Erreur de suivi pour le robot leader et erreur sur le maintien de la formation
92 Application à une flottille de 4 robots Motivations Solution 1 : Suivi individuel Solution 2 : Suivi coopératif Simulation pour une flottille complexe
93 Motivations Solution 1 : Suivi individuel Solution 2 : Suivi coopératif Simulation pour une flottille complexe Application à une flottille de 4 robots Erreur initiale sur la localisation des robots. Forme désirée de la formation : Forme géométrique désirée de la flottille V avec un alignement des robots R 1, R 3 et R 4 : l 12 = 6m ψ 12 = π 4 l 13 = 4m ψ 13 = π 2 l 34 = 4m ψ 34 = π 2.
94 Résultats pour 4 robots Motivations Solution 1 : Suivi individuel Solution 2 : Suivi coopératif Simulation pour une flottille complexe 5 y(m) 0 R 2 5 R 1 R R x(m)
95 En cours Construction de loi de commande par mode glissant intégral d ordre 2 afin de limiter le phénomène de chattering et de prendre en compte le modèle dynamique. Généralisation du principe à tous les ordres. Application à une flottille de robots réels (pekee puis miabots) Idée de base Contraindre les trajectoires d état à glisser sur l ensemble S r = {x s = ṡ =... = s (r 1) = 0} S r : ensemble de glissement d ordre r.
Algorithmes pour la planification de mouvements en robotique non-holonome
 Algorithmes pour la planification de mouvements en robotique non-holonome Frédéric Jean Unité de Mathématiques Appliquées ENSTA Le 02 février 2006 Outline 1 2 3 Modélisation Géométrique d un Robot Robot
Algorithmes pour la planification de mouvements en robotique non-holonome Frédéric Jean Unité de Mathématiques Appliquées ENSTA Le 02 février 2006 Outline 1 2 3 Modélisation Géométrique d un Robot Robot
I Stabilité, Commandabilité et Observabilité 11. 1 Introduction 13 1.1 Un exemple emprunté à la robotique... 13 1.2 Le plan... 18 1.3 Problème...
 TABLE DES MATIÈRES 5 Table des matières I Stabilité, Commandabilité et Observabilité 11 1 Introduction 13 1.1 Un exemple emprunté à la robotique................... 13 1.2 Le plan...................................
TABLE DES MATIÈRES 5 Table des matières I Stabilité, Commandabilité et Observabilité 11 1 Introduction 13 1.1 Un exemple emprunté à la robotique................... 13 1.2 Le plan...................................
Optimisation non linéaire Irène Charon, Olivier Hudry École nationale supérieure des télécommunications
 Optimisation non linéaire Irène Charon, Olivier Hudry École nationale supérieure des télécommunications A. Optimisation sans contrainte.... Généralités.... Condition nécessaire et condition suffisante
Optimisation non linéaire Irène Charon, Olivier Hudry École nationale supérieure des télécommunications A. Optimisation sans contrainte.... Généralités.... Condition nécessaire et condition suffisante
Fonctions de plusieurs variables
 Module : Analyse 03 Chapitre 00 : Fonctions de plusieurs variables Généralités et Rappels des notions topologiques dans : Qu est- ce que?: Mathématiquement, n étant un entier non nul, on définit comme
Module : Analyse 03 Chapitre 00 : Fonctions de plusieurs variables Généralités et Rappels des notions topologiques dans : Qu est- ce que?: Mathématiquement, n étant un entier non nul, on définit comme
Fonctions de plusieurs variables, intégrales multiples, et intégrales dépendant d un paramètre
 IUFM du Limousin 2009-10 PLC1 Mathématiques S. Vinatier Rappels de cours Fonctions de plusieurs variables, intégrales multiples, et intégrales dépendant d un paramètre 1 Fonctions de plusieurs variables
IUFM du Limousin 2009-10 PLC1 Mathématiques S. Vinatier Rappels de cours Fonctions de plusieurs variables, intégrales multiples, et intégrales dépendant d un paramètre 1 Fonctions de plusieurs variables
3 Approximation de solutions d équations
 3 Approximation de solutions d équations Une équation scalaire a la forme générale f(x) =0où f est une fonction de IR dans IR. Un système de n équations à n inconnues peut aussi se mettre sous une telle
3 Approximation de solutions d équations Une équation scalaire a la forme générale f(x) =0où f est une fonction de IR dans IR. Un système de n équations à n inconnues peut aussi se mettre sous une telle
Programmation linéaire
 1 Programmation linéaire 1. Le problème, un exemple. 2. Le cas b = 0 3. Théorème de dualité 4. L algorithme du simplexe 5. Problèmes équivalents 6. Complexité de l Algorithme 2 Position du problème Soit
1 Programmation linéaire 1. Le problème, un exemple. 2. Le cas b = 0 3. Théorème de dualité 4. L algorithme du simplexe 5. Problèmes équivalents 6. Complexité de l Algorithme 2 Position du problème Soit
Chapitre 0 Introduction à la cinématique
 Chapitre 0 Introduction à la cinématique Plan Vitesse, accélération Coordonnées polaires Exercices corrigés Vitesse, Accélération La cinématique est l étude du mouvement Elle suppose donc l existence à
Chapitre 0 Introduction à la cinématique Plan Vitesse, accélération Coordonnées polaires Exercices corrigés Vitesse, Accélération La cinématique est l étude du mouvement Elle suppose donc l existence à
Méthodes de quadrature. Polytech Paris-UPMC. - p. 1/48
 Méthodes de Polytech Paris-UPMC - p. 1/48 Polynôme d interpolation de Preuve et polynôme de Calcul de l erreur d interpolation Étude de la formule d erreur Autres méthodes - p. 2/48 Polynôme d interpolation
Méthodes de Polytech Paris-UPMC - p. 1/48 Polynôme d interpolation de Preuve et polynôme de Calcul de l erreur d interpolation Étude de la formule d erreur Autres méthodes - p. 2/48 Polynôme d interpolation
Exercices - Fonctions de plusieurs variables : corrigé. Pour commencer
 Pour commencer Exercice 1 - Ensembles de définition - Première année - 1. Le logarithme est défini si x + y > 0. On trouve donc le demi-plan supérieur délimité par la droite d équation x + y = 0.. 1 xy
Pour commencer Exercice 1 - Ensembles de définition - Première année - 1. Le logarithme est défini si x + y > 0. On trouve donc le demi-plan supérieur délimité par la droite d équation x + y = 0.. 1 xy
 Utilisation d informations visuelles dynamiques en asservissement visuel Armel Crétual IRISA, projet TEMIS puis VISTA L asservissement visuel géométrique Principe : Réalisation d une tâche robotique par
Utilisation d informations visuelles dynamiques en asservissement visuel Armel Crétual IRISA, projet TEMIS puis VISTA L asservissement visuel géométrique Principe : Réalisation d une tâche robotique par
Cours d Analyse. Fonctions de plusieurs variables
 Cours d Analyse Fonctions de plusieurs variables Licence 1ère année 2007/2008 Nicolas Prioux Université de Marne-la-Vallée Table des matières 1 Notions de géométrie dans l espace et fonctions à deux variables........
Cours d Analyse Fonctions de plusieurs variables Licence 1ère année 2007/2008 Nicolas Prioux Université de Marne-la-Vallée Table des matières 1 Notions de géométrie dans l espace et fonctions à deux variables........
Sujet proposé par Yves M. LEROY. Cet examen se compose d un exercice et de deux problèmes. Ces trois parties sont indépendantes.
 Promotion X 004 COURS D ANALYSE DES STRUCTURES MÉCANIQUES PAR LA MÉTHODE DES ELEMENTS FINIS (MEC 568) contrôle non classant (7 mars 007, heures) Documents autorisés : polycopié ; documents et notes de
Promotion X 004 COURS D ANALYSE DES STRUCTURES MÉCANIQUES PAR LA MÉTHODE DES ELEMENTS FINIS (MEC 568) contrôle non classant (7 mars 007, heures) Documents autorisés : polycopié ; documents et notes de
Continuité et dérivabilité d une fonction
 DERNIÈRE IMPRESSIN LE 7 novembre 014 à 10:3 Continuité et dérivabilité d une fonction Table des matières 1 Continuité d une fonction 1.1 Limite finie en un point.......................... 1. Continuité
DERNIÈRE IMPRESSIN LE 7 novembre 014 à 10:3 Continuité et dérivabilité d une fonction Table des matières 1 Continuité d une fonction 1.1 Limite finie en un point.......................... 1. Continuité
FONCTIONS DE PLUSIEURS VARIABLES (Outils Mathématiques 4)
") FONCTIONS DE PLUSIEURS VARIABLES (Outils Mathématiques 4) Bernard Le Stum Université de Rennes 1 Version du 13 mars 2009 Table des matières 1 Fonctions partielles, courbes de niveau 1 2 Limites et continuité
FONCTIONS DE PLUSIEURS VARIABLES (Outils Mathématiques 4) Bernard Le Stum Université de Rennes 1 Version du 13 mars 2009 Table des matières 1 Fonctions partielles, courbes de niveau 1 2 Limites et continuité
Résolution d équations non linéaires
 Analyse Numérique Résolution d équations non linéaires Said EL HAJJI et Touria GHEMIRES Université Mohammed V - Agdal. Faculté des Sciences Département de Mathématiques. Laboratoire de Mathématiques, Informatique
Analyse Numérique Résolution d équations non linéaires Said EL HAJJI et Touria GHEMIRES Université Mohammed V - Agdal. Faculté des Sciences Département de Mathématiques. Laboratoire de Mathématiques, Informatique
Rupture et plasticité
 Rupture et plasticité Département de Mécanique, Ecole Polytechnique, 2009 2010 Département de Mécanique, Ecole Polytechnique, 2009 2010 25 novembre 2009 1 / 44 Rupture et plasticité : plan du cours Comportements
Rupture et plasticité Département de Mécanique, Ecole Polytechnique, 2009 2010 Département de Mécanique, Ecole Polytechnique, 2009 2010 25 novembre 2009 1 / 44 Rupture et plasticité : plan du cours Comportements
Souad EL Bernoussi. Groupe d Analyse Numérique et Optimisation Rabat http ://www.fsr.ac.ma/ano/
 Recherche opérationnelle Les démonstrations et les exemples seront traités en cours Souad EL Bernoussi Groupe d Analyse Numérique et Optimisation Rabat http ://www.fsr.ac.ma/ano/ Table des matières 1 Programmation
Recherche opérationnelle Les démonstrations et les exemples seront traités en cours Souad EL Bernoussi Groupe d Analyse Numérique et Optimisation Rabat http ://www.fsr.ac.ma/ano/ Table des matières 1 Programmation
F411 - Courbes Paramétrées, Polaires
 1/43 Courbes Paramétrées Courbes polaires Longueur d un arc, Courbure F411 - Courbes Paramétrées, Polaires Michel Fournié [email protected] http://www.math.univ-toulouse.fr/ fournie/ Année 2012/2013
1/43 Courbes Paramétrées Courbes polaires Longueur d un arc, Courbure F411 - Courbes Paramétrées, Polaires Michel Fournié [email protected] http://www.math.univ-toulouse.fr/ fournie/ Année 2012/2013
Optimisation des fonctions de plusieurs variables
 Optimisation des fonctions de plusieurs variables Hervé Hocquard Université de Bordeaux, France 8 avril 2013 Extrema locaux et globaux Définition On étudie le comportement d une fonction de plusieurs variables
Optimisation des fonctions de plusieurs variables Hervé Hocquard Université de Bordeaux, France 8 avril 2013 Extrema locaux et globaux Définition On étudie le comportement d une fonction de plusieurs variables
I. Polynômes de Tchebychev
 Première épreuve CCP filière MP I. Polynômes de Tchebychev ( ) 1.a) Tout réel θ vérifie cos(nθ) = Re ((cos θ + i sin θ) n ) = Re Cn k (cos θ) n k i k (sin θ) k Or i k est réel quand k est pair et imaginaire
Première épreuve CCP filière MP I. Polynômes de Tchebychev ( ) 1.a) Tout réel θ vérifie cos(nθ) = Re ((cos θ + i sin θ) n ) = Re Cn k (cos θ) n k i k (sin θ) k Or i k est réel quand k est pair et imaginaire
aux différences est appelé équation aux différences d ordre n en forme normale.
 MODÉLISATION ET SIMULATION EQUATIONS AUX DIFFÉRENCES (I/II) 1. Rappels théoriques : résolution d équations aux différences 1.1. Équations aux différences. Définition. Soit x k = x(k) X l état scalaire
MODÉLISATION ET SIMULATION EQUATIONS AUX DIFFÉRENCES (I/II) 1. Rappels théoriques : résolution d équations aux différences 1.1. Équations aux différences. Définition. Soit x k = x(k) X l état scalaire
10 leçon 2. Leçon n 2 : Contact entre deux solides. Frottement de glissement. Exemples. (PC ou 1 er CU)
") 0 leçon 2 Leçon n 2 : Contact entre deu solides Frottement de glissement Eemples (PC ou er CU) Introduction Contact entre deu solides Liaisons de contact 2 Contact ponctuel 2 Frottement de glissement 2
0 leçon 2 Leçon n 2 : Contact entre deu solides Frottement de glissement Eemples (PC ou er CU) Introduction Contact entre deu solides Liaisons de contact 2 Contact ponctuel 2 Frottement de glissement 2
Intégrales doubles et triples - M
 Intégrales s et - [email protected] 1/27 - Intégrales (rappel) Rappels Approximation éfinition : Intégrale définie Soit f définie continue sur I = [a, b] telle que f (x) > 3 2.5 2 1.5 1.5.5 1 1.5
Intégrales s et - [email protected] 1/27 - Intégrales (rappel) Rappels Approximation éfinition : Intégrale définie Soit f définie continue sur I = [a, b] telle que f (x) > 3 2.5 2 1.5 1.5.5 1 1.5
Dérivées d ordres supérieurs. Application à l étude d extrema.
 Chapitre 5 Dérivées d ordres supérieurs. Application à l étude d extrema. On s intéresse dans ce chapitre aux dérivées d ordre ou plus d une fonction de plusieurs variables. Comme pour une fonction d une
Chapitre 5 Dérivées d ordres supérieurs. Application à l étude d extrema. On s intéresse dans ce chapitre aux dérivées d ordre ou plus d une fonction de plusieurs variables. Comme pour une fonction d une
Exercices - Polynômes : corrigé. Opérations sur les polynômes
 Opérations sur les polynômes Exercice 1 - Carré - L1/Math Sup - Si P = Q est le carré d un polynôme, alors Q est nécessairement de degré, et son coefficient dominant est égal à 1. On peut donc écrire Q(X)
Opérations sur les polynômes Exercice 1 - Carré - L1/Math Sup - Si P = Q est le carré d un polynôme, alors Q est nécessairement de degré, et son coefficient dominant est égal à 1. On peut donc écrire Q(X)
Théorème du point fixe - Théorème de l inversion locale
 Chapitre 7 Théorème du point fixe - Théorème de l inversion locale Dans ce chapitre et le suivant, on montre deux applications importantes de la notion de différentiabilité : le théorème de l inversion
Chapitre 7 Théorème du point fixe - Théorème de l inversion locale Dans ce chapitre et le suivant, on montre deux applications importantes de la notion de différentiabilité : le théorème de l inversion
Baccalauréat ES Polynésie (spécialité) 10 septembre 2014 Corrigé
 10 septembre 2014 Corrigé") Baccalauréat ES Polynésie (spécialité) 10 septembre 2014 Corrigé A. P. M. E. P. Exercice 1 5 points 1. Réponse d. : 1 e Le coefficient directeur de la tangente est négatif et n est manifestement pas 2e
Baccalauréat ES Polynésie (spécialité) 10 septembre 2014 Corrigé A. P. M. E. P. Exercice 1 5 points 1. Réponse d. : 1 e Le coefficient directeur de la tangente est négatif et n est manifestement pas 2e
Modélisation et Simulation
 Cours de modélisation et simulation p. 1/64 Modélisation et Simulation G. Bontempi Département d Informatique Boulevard de Triomphe - CP 212 http://www.ulb.ac.be/di Cours de modélisation et simulation
Cours de modélisation et simulation p. 1/64 Modélisation et Simulation G. Bontempi Département d Informatique Boulevard de Triomphe - CP 212 http://www.ulb.ac.be/di Cours de modélisation et simulation
Correction du Baccalauréat S Amérique du Nord mai 2007
 Correction du Baccalauréat S Amérique du Nord mai 7 EXERCICE points. Le plan (P) a une pour équation cartésienne : x+y z+ =. Les coordonnées de H vérifient cette équation donc H appartient à (P) et A n
Correction du Baccalauréat S Amérique du Nord mai 7 EXERCICE points. Le plan (P) a une pour équation cartésienne : x+y z+ =. Les coordonnées de H vérifient cette équation donc H appartient à (P) et A n
FIMA, 7 juillet 2005
 F. Corset 1 S. 2 1 LabSAD Université Pierre Mendes France 2 Département de Mathématiques Université de Franche-Comté FIMA, 7 juillet 2005 Plan de l exposé plus court chemin Origine du problème Modélisation
F. Corset 1 S. 2 1 LabSAD Université Pierre Mendes France 2 Département de Mathématiques Université de Franche-Comté FIMA, 7 juillet 2005 Plan de l exposé plus court chemin Origine du problème Modélisation
La programmation linéaire : une introduction. Qu est-ce qu un programme linéaire? Terminologie. Écriture mathématique
 La programmation linéaire : une introduction Qu est-ce qu un programme linéaire? Qu est-ce qu un programme linéaire? Exemples : allocation de ressources problème de recouvrement Hypothèses de la programmation
La programmation linéaire : une introduction Qu est-ce qu un programme linéaire? Qu est-ce qu un programme linéaire? Exemples : allocation de ressources problème de recouvrement Hypothèses de la programmation
Analyse de la vidéo. Chapitre 4.1 - La modélisation pour le suivi d objet. 10 mars 2015. Chapitre 4.1 - La modélisation d objet 1 / 57
 Analyse de la vidéo Chapitre 4.1 - La modélisation pour le suivi d objet 10 mars 2015 Chapitre 4.1 - La modélisation d objet 1 / 57 La représentation d objets Plan de la présentation 1 La représentation
Analyse de la vidéo Chapitre 4.1 - La modélisation pour le suivi d objet 10 mars 2015 Chapitre 4.1 - La modélisation d objet 1 / 57 La représentation d objets Plan de la présentation 1 La représentation
Fonctions de plusieurs variables
 Maths MP Exercices Fonctions de plusieurs variables Les indications ne sont ici que pour être consultées après le T (pour les exercices non traités). Avant et pendant le T, tenez bon et n allez pas les
Maths MP Exercices Fonctions de plusieurs variables Les indications ne sont ici que pour être consultées après le T (pour les exercices non traités). Avant et pendant le T, tenez bon et n allez pas les
Limites finies en un point
 8 Limites finies en un point Pour ce chapitre, sauf précision contraire, I désigne une partie non vide de R et f une fonction définie sur I et à valeurs réelles ou complees. Là encore, les fonctions usuelles,
8 Limites finies en un point Pour ce chapitre, sauf précision contraire, I désigne une partie non vide de R et f une fonction définie sur I et à valeurs réelles ou complees. Là encore, les fonctions usuelles,
Chapitre 2 Le problème de l unicité des solutions
 Université Joseph Fourier UE MAT 127 Mathématiques année 2011-2012 Chapitre 2 Le problème de l unicité des solutions Ce que nous verrons dans ce chapitre : un exemple d équation différentielle y = f(y)
Université Joseph Fourier UE MAT 127 Mathématiques année 2011-2012 Chapitre 2 Le problème de l unicité des solutions Ce que nous verrons dans ce chapitre : un exemple d équation différentielle y = f(y)
TESTS PORTMANTEAU D ADÉQUATION DE MODÈLES ARMA FAIBLES : UNE APPROCHE BASÉE SUR L AUTO-NORMALISATION
 TESTS PORTMANTEAU D ADÉQUATION DE MODÈLES ARMA FAIBLES : UNE APPROCHE BASÉE SUR L AUTO-NORMALISATION Bruno Saussereau Laboratoire de Mathématiques de Besançon Université de Franche-Comté Travail en commun
TESTS PORTMANTEAU D ADÉQUATION DE MODÈLES ARMA FAIBLES : UNE APPROCHE BASÉE SUR L AUTO-NORMALISATION Bruno Saussereau Laboratoire de Mathématiques de Besançon Université de Franche-Comté Travail en commun
Baccalauréat S Antilles-Guyane 11 septembre 2014 Corrigé
 Baccalauréat S ntilles-guyane 11 septembre 14 Corrigé EXERCICE 1 6 points Commun à tous les candidats Une entreprise de jouets en peluche souhaite commercialiser un nouveau produit et à cette fin, effectue
Baccalauréat S ntilles-guyane 11 septembre 14 Corrigé EXERCICE 1 6 points Commun à tous les candidats Une entreprise de jouets en peluche souhaite commercialiser un nouveau produit et à cette fin, effectue
Vision industrielle et télédétection - Détection d ellipses. Guillaume Martinez 17 décembre 2007
 Vision industrielle et télédétection - Détection d ellipses Guillaume Martinez 17 décembre 2007 1 Table des matières 1 Le projet 3 1.1 Objectif................................ 3 1.2 Les choix techniques.........................
Vision industrielle et télédétection - Détection d ellipses Guillaume Martinez 17 décembre 2007 1 Table des matières 1 Le projet 3 1.1 Objectif................................ 3 1.2 Les choix techniques.........................
Rappels sur les suites - Algorithme
 DERNIÈRE IMPRESSION LE 14 septembre 2015 à 12:36 Rappels sur les suites - Algorithme Table des matières 1 Suite : généralités 2 1.1 Déition................................. 2 1.2 Exemples de suites............................
DERNIÈRE IMPRESSION LE 14 septembre 2015 à 12:36 Rappels sur les suites - Algorithme Table des matières 1 Suite : généralités 2 1.1 Déition................................. 2 1.2 Exemples de suites............................
Baccalauréat ES Pondichéry 7 avril 2014 Corrigé
 Baccalauréat ES Pondichéry 7 avril 204 Corrigé EXERCICE 4 points Commun à tous les candidats. Proposition fausse. La tangente T, passant par les points A et B d abscisses distinctes, a pour coefficient
Baccalauréat ES Pondichéry 7 avril 204 Corrigé EXERCICE 4 points Commun à tous les candidats. Proposition fausse. La tangente T, passant par les points A et B d abscisses distinctes, a pour coefficient
Probabilités III Introduction à l évaluation d options
 Probabilités III Introduction à l évaluation d options Jacques Printems Promotion 2012 2013 1 Modèle à temps discret 2 Introduction aux modèles en temps continu Limite du modèle binomial lorsque N + Un
Probabilités III Introduction à l évaluation d options Jacques Printems Promotion 2012 2013 1 Modèle à temps discret 2 Introduction aux modèles en temps continu Limite du modèle binomial lorsque N + Un
8.1 Généralités sur les fonctions de plusieurs variables réelles. f : R 2 R (x, y) 1 x 2 y 2
 1 x 2 y 2") Chapitre 8 Fonctions de plusieurs variables 8.1 Généralités sur les fonctions de plusieurs variables réelles Définition. Une fonction réelle de n variables réelles est une application d une partie de R
Chapitre 8 Fonctions de plusieurs variables 8.1 Généralités sur les fonctions de plusieurs variables réelles Définition. Une fonction réelle de n variables réelles est une application d une partie de R
Fonctions de deux variables. Mai 2011
 Fonctions de deux variables Dédou Mai 2011 D une à deux variables Les fonctions modèlisent de l information dépendant d un paramètre. On a aussi besoin de modéliser de l information dépendant de plusieurs
Fonctions de deux variables Dédou Mai 2011 D une à deux variables Les fonctions modèlisent de l information dépendant d un paramètre. On a aussi besoin de modéliser de l information dépendant de plusieurs
Développements limités, équivalents et calculs de limites
 Développements ités, équivalents et calculs de ites Eercice. Déterminer le développement ité en 0 à l ordre n des fonctions suivantes :. f() e (+) 3 n. g() sin() +ln(+) n 3 3. h() e sh() n 4. i() sin(
Développements ités, équivalents et calculs de ites Eercice. Déterminer le développement ité en 0 à l ordre n des fonctions suivantes :. f() e (+) 3 n. g() sin() +ln(+) n 3 3. h() e sh() n 4. i() sin(
MATHS FINANCIERES. [email protected]. Projet OMEGA
 MATHS FINANCIERES [email protected] Projet OMEGA Sophia Antipolis, septembre 2004 1. Introduction : la valorisation de contrats optionnels Options d achat et de vente : Call et Put Une option
MATHS FINANCIERES [email protected] Projet OMEGA Sophia Antipolis, septembre 2004 1. Introduction : la valorisation de contrats optionnels Options d achat et de vente : Call et Put Une option
Développements limités. Notion de développement limité
 MT12 - ch2 Page 1/8 Développements limités Dans tout ce chapitre, I désigne un intervalle de R non vide et non réduit à un point. I Notion de développement limité Dans tout ce paragraphe, a désigne un
MT12 - ch2 Page 1/8 Développements limités Dans tout ce chapitre, I désigne un intervalle de R non vide et non réduit à un point. I Notion de développement limité Dans tout ce paragraphe, a désigne un
L ANALYSE EN COMPOSANTES PRINCIPALES (A.C.P.) Pierre-Louis GONZALEZ
 Pierre-Louis GONZALEZ") L ANALYSE EN COMPOSANTES PRINCIPALES (A.C.P.) Pierre-Louis GONZALEZ INTRODUCTION Données : n individus observés sur p variables quantitatives. L A.C.P. permet d eplorer les liaisons entre variables et
L ANALYSE EN COMPOSANTES PRINCIPALES (A.C.P.) Pierre-Louis GONZALEZ INTRODUCTION Données : n individus observés sur p variables quantitatives. L A.C.P. permet d eplorer les liaisons entre variables et
Cours de Mécanique du point matériel
 Cours de Mécanique du point matériel SMPC1 Module 1 : Mécanique 1 Session : Automne 2014 Prof. M. EL BAZ Cours de Mécanique du Point matériel Chapitre 1 : Complément Mathématique SMPC1 Chapitre 1: Rappels
Cours de Mécanique du point matériel SMPC1 Module 1 : Mécanique 1 Session : Automne 2014 Prof. M. EL BAZ Cours de Mécanique du Point matériel Chapitre 1 : Complément Mathématique SMPC1 Chapitre 1: Rappels
Analyse en Composantes Principales
 Analyse en Composantes Principales Anne B Dufour Octobre 2013 Anne B Dufour () Analyse en Composantes Principales Octobre 2013 1 / 36 Introduction Introduction Soit X un tableau contenant p variables mesurées
Analyse en Composantes Principales Anne B Dufour Octobre 2013 Anne B Dufour () Analyse en Composantes Principales Octobre 2013 1 / 36 Introduction Introduction Soit X un tableau contenant p variables mesurées
Circuits RL et RC. Chapitre 5. 5.1 Inductance
 Chapitre 5 Circuits RL et RC Ce chapitre présente les deux autres éléments linéaires des circuits électriques : l inductance et la capacitance. On verra le comportement de ces deux éléments, et ensuite
Chapitre 5 Circuits RL et RC Ce chapitre présente les deux autres éléments linéaires des circuits électriques : l inductance et la capacitance. On verra le comportement de ces deux éléments, et ensuite
Polynômes à plusieurs variables. Résultant
 Polynômes à plusieurs variables. Résultant Christophe Ritzenthaler 1 Relations coefficients-racines. Polynômes symétriques Issu de [MS] et de [Goz]. Soit A un anneau intègre. Définition 1.1. Soit a A \
Polynômes à plusieurs variables. Résultant Christophe Ritzenthaler 1 Relations coefficients-racines. Polynômes symétriques Issu de [MS] et de [Goz]. Soit A un anneau intègre. Définition 1.1. Soit a A \
Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant
 Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant I Présentation I.1 La roue autonome Ez-Wheel SAS est une entreprise française de technologie innovante fondée en 2009.
Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant I Présentation I.1 La roue autonome Ez-Wheel SAS est une entreprise française de technologie innovante fondée en 2009.
CAPTEURS - CHAINES DE MESURES
 CAPTEURS - CHAINES DE MESURES Pierre BONNET Pierre Bonnet Master GSI - Capteurs Chaînes de Mesures 1 Plan du Cours Propriétés générales des capteurs Notion de mesure Notion de capteur: principes, classes,
CAPTEURS - CHAINES DE MESURES Pierre BONNET Pierre Bonnet Master GSI - Capteurs Chaînes de Mesures 1 Plan du Cours Propriétés générales des capteurs Notion de mesure Notion de capteur: principes, classes,
Calcul intégral élémentaire en plusieurs variables
 Calcul intégral élémentaire en plusieurs variables PC*2 2 septembre 2009 Avant-propos À part le théorème de Fubini qui sera démontré dans le cours sur les intégrales à paramètres et qui ne semble pas explicitement
Calcul intégral élémentaire en plusieurs variables PC*2 2 septembre 2009 Avant-propos À part le théorème de Fubini qui sera démontré dans le cours sur les intégrales à paramètres et qui ne semble pas explicitement
Mathématique et Automatique : de la boucle ouverte à la boucle fermée. Maïtine bergounioux Laboratoire MAPMO - UMR 6628 Université d'orléans
 Mathématique et Automatique : de la boucle ouverte à la boucle fermée Maïtine bergounioux Laboratoire MAPMO - UMR 6628 Université d'orléans [email protected] Plan 1. Un peu de
Mathématique et Automatique : de la boucle ouverte à la boucle fermée Maïtine bergounioux Laboratoire MAPMO - UMR 6628 Université d'orléans [email protected] Plan 1. Un peu de
Texte Agrégation limitée par diffusion interne
 Page n 1. Texte Agrégation limitée par diffusion interne 1 Le phénomène observé Un fût de déchets radioactifs est enterré secrètement dans le Cantal. Au bout de quelques années, il devient poreux et laisse
Page n 1. Texte Agrégation limitée par diffusion interne 1 Le phénomène observé Un fût de déchets radioactifs est enterré secrètement dans le Cantal. Au bout de quelques années, il devient poreux et laisse
Chapitre 1 Cinématique du point matériel
 Chapitre 1 Cinématique du point matériel 7 1.1. Introduction 1.1.1. Domaine d étude Le programme de mécanique de math sup se limite à l étude de la mécanique classique. Sont exclus : la relativité et la
Chapitre 1 Cinématique du point matériel 7 1.1. Introduction 1.1.1. Domaine d étude Le programme de mécanique de math sup se limite à l étude de la mécanique classique. Sont exclus : la relativité et la
Techniques de Lyapunov en contrôle quantique pour le couplage dipolaire et polarisabilité
 Techniques de Lyapunov en contrôle quantique pour le couplage dipolaire et polarisabilité Andreea Grigoriu avec Jean-Michel Coron, Cătălin Lefter and Gabriel Turinici CEREMADE-Université Paris Dauphine
Techniques de Lyapunov en contrôle quantique pour le couplage dipolaire et polarisabilité Andreea Grigoriu avec Jean-Michel Coron, Cătălin Lefter and Gabriel Turinici CEREMADE-Université Paris Dauphine
Les travaux doivent être remis sous forme papier.
 Physique mathématique II Calendrier: Date Pondération/note nale Matériel couvert ExercicesSérie 1 : 25 septembre 2014 5% RH&B: Ch. 3 ExercicesSérie 2 : 23 octobre 2014 5% RH&B: Ch. 12-13 Examen 1 : 24
Physique mathématique II Calendrier: Date Pondération/note nale Matériel couvert ExercicesSérie 1 : 25 septembre 2014 5% RH&B: Ch. 3 ExercicesSérie 2 : 23 octobre 2014 5% RH&B: Ch. 12-13 Examen 1 : 24
Développement de lois et de structures de réglages destinées à la téléopération avec retour d effort
 Développement de lois et de structures de réglages destinées à la téléopération avec retour d effort Thomas Delwiche, Laurent Catoire et Michel Kinnaert Faculté des Sciences Appliquées Service d Automatique
Développement de lois et de structures de réglages destinées à la téléopération avec retour d effort Thomas Delwiche, Laurent Catoire et Michel Kinnaert Faculté des Sciences Appliquées Service d Automatique
Cours 02 : Problème général de la programmation linéaire
 Cours 02 : Problème général de la programmation linéaire Cours 02 : Problème général de la Programmation Linéaire. 5 . Introduction Un programme linéaire s'écrit sous la forme suivante. MinZ(ou maxw) =
Cours 02 : Problème général de la programmation linéaire Cours 02 : Problème général de la Programmation Linéaire. 5 . Introduction Un programme linéaire s'écrit sous la forme suivante. MinZ(ou maxw) =
De même, le périmètre P d un cercle de rayon 1 vaut P = 2π (par définition de π). Mais, on peut démontrer (difficilement!) que
. Mais, on peut démontrer (difficilement!) que") Introduction. On suppose connus les ensembles N (des entiers naturels), Z des entiers relatifs et Q (des nombres rationnels). On s est rendu compte, depuis l antiquité, que l on ne peut pas tout mesurer
Introduction. On suppose connus les ensembles N (des entiers naturels), Z des entiers relatifs et Q (des nombres rationnels). On s est rendu compte, depuis l antiquité, que l on ne peut pas tout mesurer
Notes du cours MTH1101 Calcul I Partie II: fonctions de plusieurs variables
 Notes du cours MTH1101 Calcul I Partie II: fonctions de plusieurs variables Guy Desaulniers Département de mathématiques et de génie industriel École Polytechnique de Montréal Automne 2014 Table des matières
Notes du cours MTH1101 Calcul I Partie II: fonctions de plusieurs variables Guy Desaulniers Département de mathématiques et de génie industriel École Polytechnique de Montréal Automne 2014 Table des matières
Chapitre 3. Quelques fonctions usuelles. 1 Fonctions logarithme et exponentielle. 1.1 La fonction logarithme
 Chapitre 3 Quelques fonctions usuelles 1 Fonctions logarithme et eponentielle 1.1 La fonction logarithme Définition 1.1 La fonction 7! 1/ est continue sur ]0, +1[. Elle admet donc des primitives sur cet
Chapitre 3 Quelques fonctions usuelles 1 Fonctions logarithme et eponentielle 1.1 La fonction logarithme Définition 1.1 La fonction 7! 1/ est continue sur ]0, +1[. Elle admet donc des primitives sur cet
Université Paris-Dauphine DUMI2E 1ère année, 2009-2010. Applications
 Université Paris-Dauphine DUMI2E 1ère année, 2009-2010 Applications 1 Introduction Une fonction f (plus précisément, une fonction réelle d une variable réelle) est une règle qui associe à tout réel x au
Université Paris-Dauphine DUMI2E 1ère année, 2009-2010 Applications 1 Introduction Une fonction f (plus précisément, une fonction réelle d une variable réelle) est une règle qui associe à tout réel x au
Chafa Azzedine - Faculté de Physique U.S.T.H.B 1
 Chafa Azzedine - Faculté de Physique U.S.T.H.B 1 Définition: La cinématique est une branche de la mécanique qui étudie les mouements des corps dans l espace en fonction du temps indépendamment des causes
Chafa Azzedine - Faculté de Physique U.S.T.H.B 1 Définition: La cinématique est une branche de la mécanique qui étudie les mouements des corps dans l espace en fonction du temps indépendamment des causes
Programmation linéaire
 Programmation linéaire DIDIER MAQUIN Ecole Nationale Supérieure d Electricité et de Mécanique Institut National Polytechnique de Lorraine Mathématiques discrètes cours de 2ème année Programmation linéaire
Programmation linéaire DIDIER MAQUIN Ecole Nationale Supérieure d Electricité et de Mécanique Institut National Polytechnique de Lorraine Mathématiques discrètes cours de 2ème année Programmation linéaire
Chapitre 7. Statistique des échantillons gaussiens. 7.1 Projection de vecteurs gaussiens
 Chapitre 7 Statistique des échantillons gaussiens Le théorème central limite met en évidence le rôle majeur tenu par la loi gaussienne en modélisation stochastique. De ce fait, les modèles statistiques
Chapitre 7 Statistique des échantillons gaussiens Le théorème central limite met en évidence le rôle majeur tenu par la loi gaussienne en modélisation stochastique. De ce fait, les modèles statistiques
CCP PSI - 2010 Mathématiques 1 : un corrigé
 CCP PSI - 00 Mathématiques : un corrigé Première partie. Définition d une structure euclidienne sur R n [X]... B est clairement symétrique et linéaire par rapport à sa seconde variable. De plus B(P, P
CCP PSI - 00 Mathématiques : un corrigé Première partie. Définition d une structure euclidienne sur R n [X]... B est clairement symétrique et linéaire par rapport à sa seconde variable. De plus B(P, P
Erratum de MÉCANIQUE, 6ème édition. Introduction Page xxi (milieu de page) G = 6, 672 59 10 11 m 3 kg 1 s 2
 G = 6, 672 59 10 11 m 3 kg 1 s 2") Introduction Page xxi (milieu de page) G = 6, 672 59 1 11 m 3 kg 1 s 2 Erratum de MÉCANIQUE, 6ème édition Page xxv (dernier tiers de page) le terme de Coriolis est supérieur à 1% du poids) Chapitre 1 Page
Introduction Page xxi (milieu de page) G = 6, 672 59 1 11 m 3 kg 1 s 2 Erratum de MÉCANIQUE, 6ème édition Page xxv (dernier tiers de page) le terme de Coriolis est supérieur à 1% du poids) Chapitre 1 Page
Calcul différentiel. Chapitre 1. 1.1 Différentiabilité
 Chapitre 1 Calcul différentiel L idée du calcul différentiel est d approcher au voisinage d un point une fonction f par une fonction plus simple (ou d approcher localement le graphe de f par un espace
Chapitre 1 Calcul différentiel L idée du calcul différentiel est d approcher au voisinage d un point une fonction f par une fonction plus simple (ou d approcher localement le graphe de f par un espace
Capes 2002 - Première épreuve
 Cette correction a été rédigée par Frédéric Bayart. Si vous avez des remarques à faire, ou pour signaler des erreurs, n hésitez pas à écrire à : [email protected] Mots-clés : équation fonctionnelle, série
Cette correction a été rédigée par Frédéric Bayart. Si vous avez des remarques à faire, ou pour signaler des erreurs, n hésitez pas à écrire à : [email protected] Mots-clés : équation fonctionnelle, série
Contrôle par commande prédictive d un procédé de cuisson sous infrarouge de peintures en poudre.
 Contrôle par commande prédictive d un procédé de cuisson sous infrarouge de peintures en poudre. Isabelle Bombard, Bruno da Silva, Pascal Dufour *, Pierre Laurent, Joseph Lieto. Laboratoire d Automatique
Contrôle par commande prédictive d un procédé de cuisson sous infrarouge de peintures en poudre. Isabelle Bombard, Bruno da Silva, Pascal Dufour *, Pierre Laurent, Joseph Lieto. Laboratoire d Automatique
* très facile ** facile *** difficulté moyenne **** difficile ***** très difficile I : Incontournable T : pour travailler et mémoriser le cours
 Exo7 Continuité (étude globale). Diverses fonctions Exercices de Jean-Louis Rouget. Retrouver aussi cette fiche sur www.maths-france.fr * très facile ** facile *** difficulté moyenne **** difficile *****
Exo7 Continuité (étude globale). Diverses fonctions Exercices de Jean-Louis Rouget. Retrouver aussi cette fiche sur www.maths-france.fr * très facile ** facile *** difficulté moyenne **** difficile *****
Résolution de systèmes linéaires par des méthodes directes
 Résolution de systèmes linéaires par des méthodes directes J. Erhel Janvier 2014 1 Inverse d une matrice carrée et systèmes linéaires Ce paragraphe a pour objet les matrices carrées et les systèmes linéaires.
Résolution de systèmes linéaires par des méthodes directes J. Erhel Janvier 2014 1 Inverse d une matrice carrée et systèmes linéaires Ce paragraphe a pour objet les matrices carrées et les systèmes linéaires.
Chapitre VI Fonctions de plusieurs variables
 Chapitre VI Fonctions de plusieurs variables 6. 1 Fonctions différentiables de R 2 dans R. 6. 1. 1 Définition de la différentiabilité Nous introduisons la différentiabilité sous l angle des développements
Chapitre VI Fonctions de plusieurs variables 6. 1 Fonctions différentiables de R 2 dans R. 6. 1. 1 Définition de la différentiabilité Nous introduisons la différentiabilité sous l angle des développements
Différentiabilité ; Fonctions de plusieurs variables réelles
 Différentiabilité ; Fonctions de plusieurs variables réelles Denis Vekemans R n est muni de l une des trois normes usuelles. 1,. 2 ou.. x 1 = i i n Toutes les normes de R n sont équivalentes. x i ; x 2
Différentiabilité ; Fonctions de plusieurs variables réelles Denis Vekemans R n est muni de l une des trois normes usuelles. 1,. 2 ou.. x 1 = i i n Toutes les normes de R n sont équivalentes. x i ; x 2
Chp. 4. Minimisation d une fonction d une variable
 Chp. 4. Minimisation d une fonction d une variable Avertissement! Dans tout ce chapître, I désigne un intervalle de IR. 4.1 Fonctions convexes d une variable Définition 9 Une fonction ϕ, partout définie
Chp. 4. Minimisation d une fonction d une variable Avertissement! Dans tout ce chapître, I désigne un intervalle de IR. 4.1 Fonctions convexes d une variable Définition 9 Une fonction ϕ, partout définie
Direction des Études et Synthèses Économiques Département des Comptes Nationaux Division des Comptes Trimestriels
 Etab=MK3, Timbre=G430, TimbreDansAdresse=Vrai, Version=W2000/Charte7, VersionTravail=W2000/Charte7 Direction des Études et Synthèses Économiques Département des Comptes Nationaux Division des Comptes Trimestriels
Etab=MK3, Timbre=G430, TimbreDansAdresse=Vrai, Version=W2000/Charte7, VersionTravail=W2000/Charte7 Direction des Études et Synthèses Économiques Département des Comptes Nationaux Division des Comptes Trimestriels
Les correcteurs accorderont une importance particulière à la rigueur des raisonnements et aux représentations graphiques demandées.
 Les correcteurs accorderont une importance particulière à la rigueur des raisonnements et aux représentations graphiques demandées. 1 Ce sujet aborde le phénomène d instabilité dans des systèmes dynamiques
Les correcteurs accorderont une importance particulière à la rigueur des raisonnements et aux représentations graphiques demandées. 1 Ce sujet aborde le phénomène d instabilité dans des systèmes dynamiques
CABLECAM de HYMATOM. Figure 1 : Schéma du système câblecam et détail du moufle vu de dessus.
 CABLECAM de HYMATOM La société Hymatom conçoit et fabrique des systèmes de vidéosurveillance. Le système câblecam (figure 1) est composé d un chariot mobile sur quatre roues posé sur deux câbles porteurs
CABLECAM de HYMATOM La société Hymatom conçoit et fabrique des systèmes de vidéosurveillance. Le système câblecam (figure 1) est composé d un chariot mobile sur quatre roues posé sur deux câbles porteurs
Fonctions de plusieurs variables : dérivés partielles, diérentielle. Fonctions composées. Fonctions de classe C 1. Exemples
 45 Fonctions de plusieurs variables : dérivés partielles, diérentielle. Fonctions composées. Fonctions de classe C 1. Exemples Les espaces vectoriels considérés sont réels, non réduits au vecteur nul et
45 Fonctions de plusieurs variables : dérivés partielles, diérentielle. Fonctions composées. Fonctions de classe C 1. Exemples Les espaces vectoriels considérés sont réels, non réduits au vecteur nul et
La fonction exponentielle
 DERNIÈRE IMPRESSION LE 2 novembre 204 à :07 La fonction exponentielle Table des matières La fonction exponentielle 2. Définition et théorèmes.......................... 2.2 Approche graphique de la fonction
DERNIÈRE IMPRESSION LE 2 novembre 204 à :07 La fonction exponentielle Table des matières La fonction exponentielle 2. Définition et théorèmes.......................... 2.2 Approche graphique de la fonction
1 radian. De même, la longueur d un arc de cercle de rayon R et dont l angle au centre a pour mesure α radians est α R. R AB =R.
 Angles orientés Trigonométrie I. Préliminaires. Le radian Définition B R AB =R C O radian R A Soit C un cercle de centre O. Dire que l angle géométrique AOB a pour mesure radian signifie que la longueur
Angles orientés Trigonométrie I. Préliminaires. Le radian Définition B R AB =R C O radian R A Soit C un cercle de centre O. Dire que l angle géométrique AOB a pour mesure radian signifie que la longueur
Calcul matriciel. Définition 1 Une matrice de format (m,n) est un tableau rectangulaire de mn éléments, rangés en m lignes et n colonnes.
 est un tableau rectangulaire de mn éléments, rangés en m lignes et n colonnes.") 1 Définitions, notations Calcul matriciel Définition 1 Une matrice de format (m,n) est un tableau rectangulaire de mn éléments, rangés en m lignes et n colonnes. On utilise aussi la notation m n pour le
1 Définitions, notations Calcul matriciel Définition 1 Une matrice de format (m,n) est un tableau rectangulaire de mn éléments, rangés en m lignes et n colonnes. On utilise aussi la notation m n pour le
OPTIMISATION À UNE VARIABLE
 OPTIMISATION À UNE VARIABLE Sommaire 1. Optimum locaux d'une fonction... 1 1.1. Maximum local... 1 1.2. Minimum local... 1 1.3. Points stationnaires et points critiques... 2 1.4. Recherche d'un optimum
OPTIMISATION À UNE VARIABLE Sommaire 1. Optimum locaux d'une fonction... 1 1.1. Maximum local... 1 1.2. Minimum local... 1 1.3. Points stationnaires et points critiques... 2 1.4. Recherche d'un optimum
Chapitre 5 : Flot maximal dans un graphe
 Graphes et RO TELECOM Nancy A Chapitre 5 : Flot maximal dans un graphe J.-F. Scheid 1 Plan du chapitre I. Définitions 1 Graphe Graphe valué 3 Représentation d un graphe (matrice d incidence, matrice d
Graphes et RO TELECOM Nancy A Chapitre 5 : Flot maximal dans un graphe J.-F. Scheid 1 Plan du chapitre I. Définitions 1 Graphe Graphe valué 3 Représentation d un graphe (matrice d incidence, matrice d
Programmation Linéaire - Cours 1
 Programmation Linéaire - Cours 1 P. Pesneau [email protected] Université Bordeaux 1 Bât A33 - Bur 265 Ouvrages de référence V. Chvátal - Linear Programming, W.H.Freeman, New York, 1983.
Programmation Linéaire - Cours 1 P. Pesneau [email protected] Université Bordeaux 1 Bât A33 - Bur 265 Ouvrages de référence V. Chvátal - Linear Programming, W.H.Freeman, New York, 1983.
SCIENCES INDUSTRIELLES POUR L INGÉNIEUR. Partie I - Analyse système
 SCIENCES INDUSTRIELLES POUR L INGÉNIEUR COMPORTEMENT DYNAMIQUE D UN VEHICULE AUTO-BALANCÉ DE TYPE SEGWAY Partie I - Analyse système Poignée directionnelle Barre d appui Plate-forme Photographies 1 Le support
SCIENCES INDUSTRIELLES POUR L INGÉNIEUR COMPORTEMENT DYNAMIQUE D UN VEHICULE AUTO-BALANCÉ DE TYPE SEGWAY Partie I - Analyse système Poignée directionnelle Barre d appui Plate-forme Photographies 1 Le support
Chapitre 3. Mesures stationnaires. et théorèmes de convergence
 Chapitre 3 Mesures stationnaires et théorèmes de convergence Christiane Cocozza-Thivent, Université de Marne-la-Vallée p.1 I. Mesures stationnaires Christiane Cocozza-Thivent, Université de Marne-la-Vallée
Chapitre 3 Mesures stationnaires et théorèmes de convergence Christiane Cocozza-Thivent, Université de Marne-la-Vallée p.1 I. Mesures stationnaires Christiane Cocozza-Thivent, Université de Marne-la-Vallée
Introduction au maillage pour le calcul scientifique
 Introduction au maillage pour le calcul scientifique CEA DAM Île-de-France, Bruyères-le-Châtel [email protected] Présentation adaptée du tutorial de Steve Owen, Sandia National Laboratories, Albuquerque,
Introduction au maillage pour le calcul scientifique CEA DAM Île-de-France, Bruyères-le-Châtel [email protected] Présentation adaptée du tutorial de Steve Owen, Sandia National Laboratories, Albuquerque,
L apprentissage automatique
 L apprentissage automatique L apprentissage automatique L'apprentissage automatique fait référence au développement, à l analyse et à l implémentation de méthodes qui permettent à une machine d évoluer
L apprentissage automatique L apprentissage automatique L'apprentissage automatique fait référence au développement, à l analyse et à l implémentation de méthodes qui permettent à une machine d évoluer
LA METHODE DU COUT CIBLE (TARGET COSTING)
") LA METHODE DU COUT CIBLE (TARGET COSTING) Finalité de la démarche Optimiser les performances futures de profit du produit sur l ensemble de son cycle de vie. Prérequis Connaissance élémentaire de la problématique
LA METHODE DU COUT CIBLE (TARGET COSTING) Finalité de la démarche Optimiser les performances futures de profit du produit sur l ensemble de son cycle de vie. Prérequis Connaissance élémentaire de la problématique
Manipulateurs Pleinement Parallèles
 Séparation des Solutions aux Modèles Géométriques Direct et Inverse pour les Manipulateurs Pleinement Parallèles Chablat Damien, Wenger Philippe Institut de Recherche en Communications et Cybernétique
Séparation des Solutions aux Modèles Géométriques Direct et Inverse pour les Manipulateurs Pleinement Parallèles Chablat Damien, Wenger Philippe Institut de Recherche en Communications et Cybernétique
INTRODUCTION. A- Modélisation et paramétrage : CHAPITRE I : MODÉLISATION. I. Paramétrage de la position d un solide : (S1) O O1 X
 O O1 X") INTRODUCTION La conception d'un mécanisme en vue de sa réalisation industrielle comporte plusieurs étapes. Avant d'aboutir à la maquette numérique du produit définitif, il est nécessaire d'effectuer une
INTRODUCTION La conception d'un mécanisme en vue de sa réalisation industrielle comporte plusieurs étapes. Avant d'aboutir à la maquette numérique du produit définitif, il est nécessaire d'effectuer une
MESURE ET PRECISION. Il est clair que si le voltmètre mesure bien la tension U aux bornes de R, l ampèremètre, lui, mesure. R mes. mes. .
 MESURE ET PRECISIO La détermination de la valeur d une grandeur G à partir des mesures expérimentales de grandeurs a et b dont elle dépend n a vraiment de sens que si elle est accompagnée de la précision
MESURE ET PRECISIO La détermination de la valeur d une grandeur G à partir des mesures expérimentales de grandeurs a et b dont elle dépend n a vraiment de sens que si elle est accompagnée de la précision
Chapitre 6. Fonction réelle d une variable réelle
 Chapitre 6 Fonction réelle d une variable réelle 6. Généralités et plan d étude Une application de I dans R est une correspondance entre les éléments de I et ceu de R telle que tout élément de I admette
Chapitre 6 Fonction réelle d une variable réelle 6. Généralités et plan d étude Une application de I dans R est une correspondance entre les éléments de I et ceu de R telle que tout élément de I admette
Cours de mathématiques
 DEUG MIAS premier niveau Cours de mathématiques année 2003/2004 Guillaume Legendre (version révisée du 3 avril 2015) Table des matières 1 Éléments de logique 1 1.1 Assertions...............................................
DEUG MIAS premier niveau Cours de mathématiques année 2003/2004 Guillaume Legendre (version révisée du 3 avril 2015) Table des matières 1 Éléments de logique 1 1.1 Assertions...............................................
Première partie. Préliminaires : noyaux itérés. MPSI B 6 juin 2015
 Énoncé Soit V un espace vectoriel réel. L espace vectoriel des endomorphismes de V est désigné par L(V ). Lorsque f L(V ) et k N, on désigne par f 0 = Id V, f k = f k f la composée de f avec lui même k
Énoncé Soit V un espace vectoriel réel. L espace vectoriel des endomorphismes de V est désigné par L(V ). Lorsque f L(V ) et k N, on désigne par f 0 = Id V, f k = f k f la composée de f avec lui même k