Petit cours d automatique
|
|
|
- Franck Latour
- il y a 10 ans
- Total affichages :
Transcription
1 Petit cours d automatique Pourquoi ce cours? Modèle d un système physique Résolution par transformée de Laplace Réponse en fréquence, spectre Commande par rétro-action Commande PID Simulation Matlab/Simulink Commande par ordinateur Transformée en Z Simulation Matlab/Simulink

2 Pourquoi ce cours? Les systèmes embarqués s adressent à de nombreux domaines d application et beaucoup de ces domaines traitent et contrôlent des données issues du monde physique :. il est important de savoir comment les spécialistes de ces domaines procèdent pour pouvoir coopérer avec eux ; 2. les ordinateurs interagissant avec les systèmes physiques forment des systèmes complexes qui acquièrent, par cette interaction, de nouvelles propriétés : des changements mineurs du point de vue informatique peuvent avoir des conséquences importantes du point de vue système ; 3. des langages et outils de simulation, d origine automatique et traitement de signal, deviennent par extension, des outils de programmation dont l importance croît ; certains sont devenus des standards de fait (avionique, automobile,...). Il est important de connaître et comprendre cette «informatique venue d ailleurs»

3 Modèle d un système physique Une suspension de voiture x Forces en présence : k.. f - ressort : k(x x 0 ) - amortisseur : fx - inertie : mx - force externe, pesanteur,... bilan : équation différentielle mx + fx + kx = u normalisation : x + 2zwx + w 2 x = w 2 u w pulsation propre z amortissement

4 Résolution par transformée de Laplace X(s) = L(x) = 0 x(t)e st dt propriétés : linéarité : L(ax + by) = al(x) + bl(y) transforme les équations différentielles en équations algébriques : L(x ) = sl(x) x(0) transforme les exponentielles en fractions rationnelles : ( ) t n L n! e λt = (s + λ) n+
 t n L n!")
5 Application x + 2zwx + w 2 x = w 2 u s 2 X + 2zwsX + w 2 X = w 2 U X = w 2 s 2 + 2zws + w 2 U Recherche de solutions : trouver les racines du dénominateur (pôles) décomposer en éléments simples et inverser la transformée. Trois cas (réponse impulsionnelle U = ) : z 2 < : racines complexes conjuguées : z 2 = : racine double z 2 > : racines réelles
 : z 2 < : racines complexes conjuguées : z 2 =")
6 z 2 < : racines complexes conjuguées : X = A s + zw + iw z 2 + B s + zw iw z 2 A = x = w 2 2iw z, B = w 2 2 2iw z 2 z2 t e iw z 2 t w eiw e zwt z 2 2i w x = z 2 e zwt sin(w z 2 t) régime oscillant (suspension trop molle)! z 2 = : racine double x = w 2 te wt z 2 > : racines réelles x = (suspension trop dure)! w z2 (e w(z+ z 2 )t e w(z z 2 )t )

7 Réponse en fréquence, spectre A la mémoire de Joseph Fourier u = e iwt U = s + iw X = H s + iw X = AH + B s + iw B = H( iw) Les exponentielles complexes sont les vecteurs propres des opérateurs ; H( iw) est la valeur propre associée au vecteur propre e iwt.
 est la valeur propre associée au vecteur")
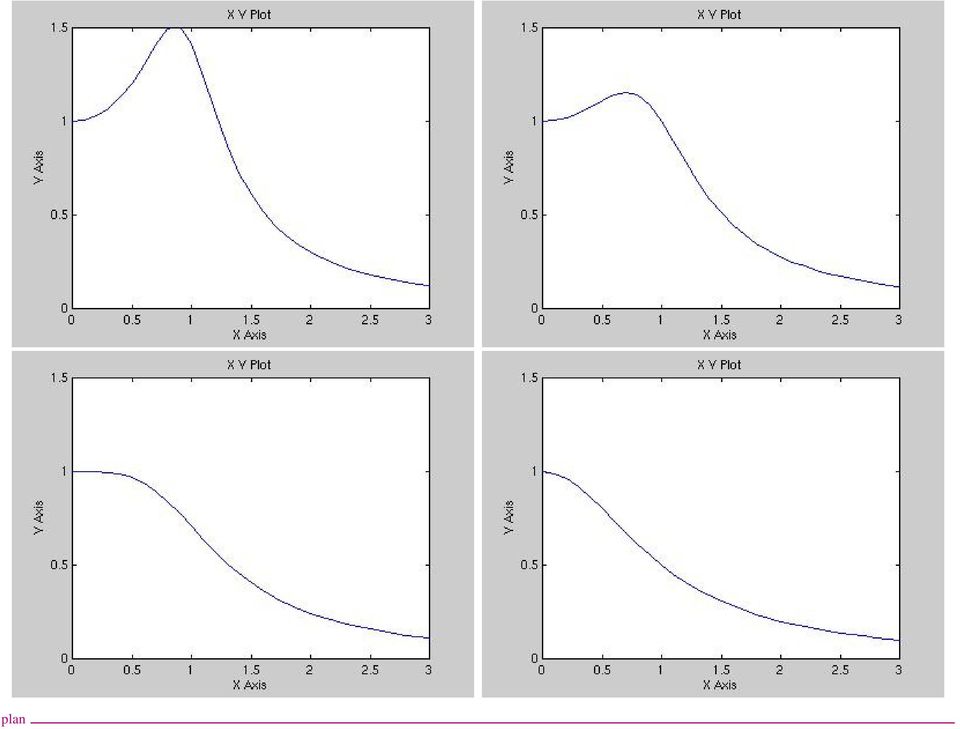
8 Exemple de la suspension H = H( iw) = w 2 0 s 2 + 2zw 0 s + w 2 0 w 2 0 w 2 2izw 0 w + w 2 0 H( iw) est une fonction complexe de la fréquence d excitation w Elle se décompose en amplitude et phase : H( iw) = w 2 0 (w 2 0 w 2 ) 2 + 4z 2 w 2 0 w2 ArgH( iw) = Arctg 2zw 0w w 2 0 w2 les pages suivantes décrivent le spectre d amplitude en fonction de w pour w 0 = et des valeurs croissantes de z 2 = 0.5,, 2, 4.

9
10 Commande par rétro-action Le système à commander : grue mono-dimensionnelle, linéarisée X 0 a T X mg m X = k( X 0 X) + m g - pesanteur : m g - tension du cable : k( X 0 X) - inertie : m X Projection sur l axe vertical : my = k(y 0 y) mg 0 = kl mg k = m g l avec w = g l aucun amortissement! pulsation propre du pendule. Projection sur l axe horizontal : mx = k(x 0 x) x = g l (x 0 x) X = w 2 s 2 +w 2 X 0

11 Notion de feedback Commander en fonction de l écart entre position désirée x 0 et obtenue x : x 0 e x C H Calcul formel de ce diagramme! b e = x 0 x x = H(Ce + b) x = H(C(x 0 x) + b) ( + HC)x = H(Cx 0 + b) x = HC + HC x 0 + H + HC b
 x = H(C(x 0 x) + b) ( + HC)x =")
12 x = HC + HC x 0 + H + HC b Idée de base : C grand Mais attention au pompage : HC + HC, H + HC 0, x x 0 H = w 2 s 2 +2zws+w 2 C = k HC + HC = w 2 k s 2 + 2zws + w 2 ( + k) w = w + k z = z + k k grand : le système devient de plus en plus oscillant.

13 Commande PID Pour réduire les oscillations, ajouter de la dérivée k s Pour rallier le but, ajouter de l intégrale k s C = k + k s + k s Application à la grue (w = ) HC + HC = k s 2 + ks + k s 3 + k s 2 + (k + )s + k
 HC + HC = k s 2 + ks + k s 3 + k s 2 + (k + )s")
14 Placement des pôles Choix des paramètres : identification à un dénominateur s 3 + k s 2 + (k + )s + k = (s + )(s 2 +.4ws + w 2 ) s 3 + k s 2 + (k + )s + k = s 3 + ( +.4w)s 2 + (w 2 +.4w)s + w 2 D où Par exemple k = w 2, k = w 2 +.4w, k = +.4w k = 4, k = 5.8, k = 3.8
s + w 2 D où Par exemple k = w 2, k = w 2 +.4w, k = +.")
15 Simulation Matlab/Simulink Scope Step s 2+2s+ Transfer Fcn In Out SubSystem s 2+ Transfer Fcn White Noise 5.8 Gain2 In 4 Gain s Integrator Out 3.8 du/dt Gain Derivative

16 Résultats Sans bruit 2 Avec bruit Time offset: 0 Time offset: 0

17 Commande par ordinateur Et les ordinateurs dans tout ça? idée générale : schémas d intégration à pas constant échantillonnage et fonctionnement périodique deux techniques : construire un contrôleur continu et l échantillonner ; échantillonner le système à contrôler et construire un contrôleur échantillonné (théorie de la commande échantillonnée). Dans tous les cas, il faut choisir la période.
.")
18 Commande échantillonnée Fondée sur le parallèle Continu Echantillonné Modèle équations différentielles équations aux différences Solutions exponentielles puissances Transformée L(f) = f(t)e st dt Z(f) = f(n)z n 0 Intégrale s z z Retard e T s z 0
 = f(t)e st dt Z(f) = f(n)z n 0 Intégrale s z z Retard e")
19 Propriétés de la transformée en z linéarité : Z(ax + by) = az(x) + bzl(y) transforme les équations aux différences en équations algébriques : Z(x(n + )) = z(z(x) x(0)) transforme les puissances en fractions rationnelles : Z(C k na n k ) = ( z ) k+ z a
 = (")
20 Choix de la période Solution théorique : Théorème de Shannon : la fréquence d échantillonnage doit être supérieure à deux fois la fréquence de coupure. Solution pratique : analyse numérique Théorème fondamental de l analyse numérique Théorème des accroissements finis : Pour tout x, t, il existe α [0, ] tel que x(t + T ) = k 0 T i i! x(i) (t) + T k+ (k + )! x(k+) (t + αt )
 = k 0 T i i!")
21 Exemple : schéma d Euler x(t + T ) x(t) + T x (t) car x(t + T ) (x(t) + T x (t)) T 2 2 sup t x (t) Application : exponentielle x(t) = e at x (t) = a 2 e at a 2 En pratique on prend. T 2 a T 0.4 a T = 0. a
22 Z, Laplace,... est l opérateur retard unité z Si on choisit un pas d échantillonnage T on peut donc écrire : z = e st On a alors l approximation du premier ordre (développement limité) Donc, au premier ordre, e st st st z st z = z z s z zt
23 Z, Laplace et Euler Et Euler? s z zt Appliquons à une fonction de transfert H : H(s) H( z zt ) On est passé d un système continu à un système échantillonné, imtable sur calculateur Cela correspond à la méthode d Euler : sx(s) z zt x(z) x (t) x(n) x(n ) T
24 Simulation Matlab/Simulink 5.8 Gain2 4 T Out In Gain Hold Integrator 3.8 Gain 0. Discrete Filter
25 Résultats 0.5 Sans bruit Avec bruit Time offset: 0 Time offset: 0 comparables à ceux obtenus en continu
26 Z et Lustre 5.8 Gain2 4 T Out In Gain Hold Integrator 3.8 Gain 0. Discrete Filter Le même en Lustre : y = 5.8*x + 4.0*yi + 3.8*yd ; yi = T*x + (0.0 -> pre yi) ; yd = (x - (0.0 -> pre x))/t ;
27 De Z à Lustre En transformée en Z Y i = T z z X D où (z )Y i = T zx zy i = T zx Y i Y i = T X z Y i Le même en Lustre : yi = T*x + (0.0 -> pre yi) ;
28 Conclusion On note la parenté (filiation) entre Lustre et les méthodes de l automatique : Tous deux réfléchissent en termes de réseaux d opérateurs agissant globalement sur des signaux. L automatique linéaire a un calcul symbolique plus riche (fractions rationnelles) mais limité au linéaire. Lustre a aussi un calcul symbolique bien que plus restreint (commutation des pre) Cela explique sans doute la bonne acceptation de Lustre dans le monde de l automatique.
Oscillations libres des systèmes à deux degrés de liberté
 Chapitre 4 Oscillations libres des systèmes à deux degrés de liberté 4.1 Introduction Les systèmes qui nécessitent deux coordonnées indépendantes pour spécifier leurs positions sont appelés systèmes à
Chapitre 4 Oscillations libres des systèmes à deux degrés de liberté 4.1 Introduction Les systèmes qui nécessitent deux coordonnées indépendantes pour spécifier leurs positions sont appelés systèmes à
I Stabilité, Commandabilité et Observabilité 11. 1 Introduction 13 1.1 Un exemple emprunté à la robotique... 13 1.2 Le plan... 18 1.3 Problème...
 TABLE DES MATIÈRES 5 Table des matières I Stabilité, Commandabilité et Observabilité 11 1 Introduction 13 1.1 Un exemple emprunté à la robotique................... 13 1.2 Le plan...................................
TABLE DES MATIÈRES 5 Table des matières I Stabilité, Commandabilité et Observabilité 11 1 Introduction 13 1.1 Un exemple emprunté à la robotique................... 13 1.2 Le plan...................................
LABO 5 ET 6 TRAITEMENT DE SIGNAL SOUS SIMULINK
 LABO 5 ET 6 TRAITEMENT DE SIGNAL SOUS SIMULINK 5.1 Introduction Simulink est l'extension graphique de MATLAB permettant, d une part de représenter les fonctions mathématiques et les systèmes sous forme
LABO 5 ET 6 TRAITEMENT DE SIGNAL SOUS SIMULINK 5.1 Introduction Simulink est l'extension graphique de MATLAB permettant, d une part de représenter les fonctions mathématiques et les systèmes sous forme
CHAPITRE IV Oscillations libres des systèmes à plusieurs degrés de liberté
 CHAPITE IV Oscillations ibres des Systèmes à plusieurs derés de liberté 010-011 CHAPITE IV Oscillations libres des systèmes à plusieurs derés de liberté Introduction : Dans ce chapitre, nous examinons
CHAPITE IV Oscillations ibres des Systèmes à plusieurs derés de liberté 010-011 CHAPITE IV Oscillations libres des systèmes à plusieurs derés de liberté Introduction : Dans ce chapitre, nous examinons
BTS Groupement A. Mathématiques Session 2011. Spécialités CIRA, IRIS, Systèmes électroniques, TPIL
 BTS Groupement A Mathématiques Session 11 Exercice 1 : 1 points Spécialités CIRA, IRIS, Systèmes électroniques, TPIL On considère un circuit composé d une résistance et d un condensateur représenté par
BTS Groupement A Mathématiques Session 11 Exercice 1 : 1 points Spécialités CIRA, IRIS, Systèmes électroniques, TPIL On considère un circuit composé d une résistance et d un condensateur représenté par
TD1 Signaux, énergie et puissance, signaux aléatoires
 TD1 Signaux, énergie et puissance, signaux aléatoires I ) Ecrire l'expression analytique des signaux représentés sur les figures suivantes à l'aide de signaux particuliers. Dans le cas du signal y(t) trouver
TD1 Signaux, énergie et puissance, signaux aléatoires I ) Ecrire l'expression analytique des signaux représentés sur les figures suivantes à l'aide de signaux particuliers. Dans le cas du signal y(t) trouver
LES CARACTERISTIQUES DES SUPPORTS DE TRANSMISSION
 LES CARACTERISTIQUES DES SUPPORTS DE TRANSMISSION LES CARACTERISTIQUES DES SUPPORTS DE TRANSMISSION ) Caractéristiques techniques des supports. L infrastructure d un réseau, la qualité de service offerte,
LES CARACTERISTIQUES DES SUPPORTS DE TRANSMISSION LES CARACTERISTIQUES DES SUPPORTS DE TRANSMISSION ) Caractéristiques techniques des supports. L infrastructure d un réseau, la qualité de service offerte,
Analyse en Composantes Principales
 Analyse en Composantes Principales Anne B Dufour Octobre 2013 Anne B Dufour () Analyse en Composantes Principales Octobre 2013 1 / 36 Introduction Introduction Soit X un tableau contenant p variables mesurées
Analyse en Composantes Principales Anne B Dufour Octobre 2013 Anne B Dufour () Analyse en Composantes Principales Octobre 2013 1 / 36 Introduction Introduction Soit X un tableau contenant p variables mesurées
Concours EPITA 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette BMW K1200S
 Concours EPIT 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette MW K1200S Durée : 2h. Calculatrices autorisées. Présentation du problème Le problème
Concours EPIT 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette MW K1200S Durée : 2h. Calculatrices autorisées. Présentation du problème Le problème
Automatique Linéaire 1 Travaux Dirigés 1A ISMIN
 Automatique Linéaire 1 Travaux Dirigés Travaux dirigés, Automatique linéaire 1 J.M. Dutertre 2014 TD 1 Introduction, modélisation, outils. Exercice 1.1 : Calcul de la réponse d un 2 nd ordre à une rampe
Automatique Linéaire 1 Travaux Dirigés Travaux dirigés, Automatique linéaire 1 J.M. Dutertre 2014 TD 1 Introduction, modélisation, outils. Exercice 1.1 : Calcul de la réponse d un 2 nd ordre à une rampe
Notions d asservissements et de Régulations
 I. Introduction I. Notions d asservissements et de Régulations Le professeur de Génie Electrique doit faire passer des notions de régulation à travers ses enseignements. Les notions principales qu'il a
I. Introduction I. Notions d asservissements et de Régulations Le professeur de Génie Electrique doit faire passer des notions de régulation à travers ses enseignements. Les notions principales qu'il a
CABLECAM de HYMATOM. Figure 1 : Schéma du système câblecam et détail du moufle vu de dessus.
 CABLECAM de HYMATOM La société Hymatom conçoit et fabrique des systèmes de vidéosurveillance. Le système câblecam (figure 1) est composé d un chariot mobile sur quatre roues posé sur deux câbles porteurs
CABLECAM de HYMATOM La société Hymatom conçoit et fabrique des systèmes de vidéosurveillance. Le système câblecam (figure 1) est composé d un chariot mobile sur quatre roues posé sur deux câbles porteurs
SUJET ZÉRO Epreuve d'informatique et modélisation de systèmes physiques
 SUJET ZÉRO Epreuve d'informatique et modélisation de systèmes physiques Durée 4 h Si, au cours de l épreuve, un candidat repère ce qui lui semble être une erreur d énoncé, d une part il le signale au chef
SUJET ZÉRO Epreuve d'informatique et modélisation de systèmes physiques Durée 4 h Si, au cours de l épreuve, un candidat repère ce qui lui semble être une erreur d énoncé, d une part il le signale au chef
TP 7 : oscillateur de torsion
 TP 7 : oscillateur de torsion Objectif : étude des oscillations libres et forcées d un pendule de torsion 1 Principe général 1.1 Définition Un pendule de torsion est constitué par un fil large (métallique)
TP 7 : oscillateur de torsion Objectif : étude des oscillations libres et forcées d un pendule de torsion 1 Principe général 1.1 Définition Un pendule de torsion est constitué par un fil large (métallique)
3. Conditionnement P (B)
") Conditionnement 16 3. Conditionnement Dans cette section, nous allons rappeler un certain nombre de définitions et de propriétés liées au problème du conditionnement, c est à dire à la prise en compte
Conditionnement 16 3. Conditionnement Dans cette section, nous allons rappeler un certain nombre de définitions et de propriétés liées au problème du conditionnement, c est à dire à la prise en compte
SYSTEMES LINEAIRES DU PREMIER ORDRE
 SYSTEMES LINEIRES DU PREMIER ORDRE 1. DEFINITION e(t) SYSTEME s(t) Un système est dit linéaire invariant du premier ordre si la réponse s(t) est liée à l excitation e(t) par une équation différentielle
SYSTEMES LINEIRES DU PREMIER ORDRE 1. DEFINITION e(t) SYSTEME s(t) Un système est dit linéaire invariant du premier ordre si la réponse s(t) est liée à l excitation e(t) par une équation différentielle
Les correcteurs accorderont une importance particulière à la rigueur des raisonnements et aux représentations graphiques demandées.
 Les correcteurs accorderont une importance particulière à la rigueur des raisonnements et aux représentations graphiques demandées. 1 Ce sujet aborde le phénomène d instabilité dans des systèmes dynamiques
Les correcteurs accorderont une importance particulière à la rigueur des raisonnements et aux représentations graphiques demandées. 1 Ce sujet aborde le phénomène d instabilité dans des systèmes dynamiques
La fonction exponentielle
 DERNIÈRE IMPRESSION LE 2 novembre 204 à :07 La fonction exponentielle Table des matières La fonction exponentielle 2. Définition et théorèmes.......................... 2.2 Approche graphique de la fonction
DERNIÈRE IMPRESSION LE 2 novembre 204 à :07 La fonction exponentielle Table des matières La fonction exponentielle 2. Définition et théorèmes.......................... 2.2 Approche graphique de la fonction
Table des matières. I Mise à niveau 11. Préface
 Table des matières Préface v I Mise à niveau 11 1 Bases du calcul commercial 13 1.1 Alphabet grec...................................... 13 1.2 Symboles mathématiques............................... 14 1.3
Table des matières Préface v I Mise à niveau 11 1 Bases du calcul commercial 13 1.1 Alphabet grec...................................... 13 1.2 Symboles mathématiques............................... 14 1.3
Projet de Traitement du Signal Segmentation d images SAR
 Projet de Traitement du Signal Segmentation d images SAR Introduction En analyse d images, la segmentation est une étape essentielle, préliminaire à des traitements de haut niveau tels que la classification,
Projet de Traitement du Signal Segmentation d images SAR Introduction En analyse d images, la segmentation est une étape essentielle, préliminaire à des traitements de haut niveau tels que la classification,
Chapitre 7 : Intégration sur un intervalle quelconque
 Universités Paris 6 et Paris 7 M1 MEEF Analyse (UE 3) 2013-2014 Chapitre 7 : Intégration sur un intervalle quelconque 1 Fonctions intégrables Définition 1 Soit I R un intervalle et soit f : I R + une fonction
Universités Paris 6 et Paris 7 M1 MEEF Analyse (UE 3) 2013-2014 Chapitre 7 : Intégration sur un intervalle quelconque 1 Fonctions intégrables Définition 1 Soit I R un intervalle et soit f : I R + une fonction
La Licence Mathématiques et Economie-MASS Université de Sciences Sociales de Toulouse 1
 La Licence Mathématiques et Economie-MASS Université de Sciences Sociales de Toulouse 1 La licence Mathématiques et Economie-MASS de l Université des Sciences Sociales de Toulouse propose sur les trois
La Licence Mathématiques et Economie-MASS Université de Sciences Sociales de Toulouse 1 La licence Mathématiques et Economie-MASS de l Université des Sciences Sociales de Toulouse propose sur les trois
Chapitre 2 Le problème de l unicité des solutions
 Université Joseph Fourier UE MAT 127 Mathématiques année 2011-2012 Chapitre 2 Le problème de l unicité des solutions Ce que nous verrons dans ce chapitre : un exemple d équation différentielle y = f(y)
Université Joseph Fourier UE MAT 127 Mathématiques année 2011-2012 Chapitre 2 Le problème de l unicité des solutions Ce que nous verrons dans ce chapitre : un exemple d équation différentielle y = f(y)
Partie 1 - Séquence 3 Original d une fonction
 Partie - Séquence 3 Original d une fonction Lycée Victor Hugo - Besançon - STS 2 I. Généralités I. Généralités Définition Si F(p) = L [f(t)u (t)](p), alors on dit que f est l original de F. On note f(t)
Partie - Séquence 3 Original d une fonction Lycée Victor Hugo - Besançon - STS 2 I. Généralités I. Généralités Définition Si F(p) = L [f(t)u (t)](p), alors on dit que f est l original de F. On note f(t)
Transmission de données. A) Principaux éléments intervenant dans la transmission
 Principaux éléments intervenant dans la transmission") Page 1 / 7 A) Principaux éléments intervenant dans la transmission A.1 Equipement voisins Ordinateur ou terminal Ordinateur ou terminal Canal de transmission ETTD ETTD ETTD : Equipement Terminal de Traitement
Page 1 / 7 A) Principaux éléments intervenant dans la transmission A.1 Equipement voisins Ordinateur ou terminal Ordinateur ou terminal Canal de transmission ETTD ETTD ETTD : Equipement Terminal de Traitement
Chapitre 5 : Le travail d une force :
 Classe de 1èreS Chapitre 5 Physique Chapitre 5 : Le travail d une force : Introduction : fiche élève Considérons des objets qui subissent des forces dont le point d application se déplace : Par exemple
Classe de 1èreS Chapitre 5 Physique Chapitre 5 : Le travail d une force : Introduction : fiche élève Considérons des objets qui subissent des forces dont le point d application se déplace : Par exemple
Traitement du signal avec Scilab : la transformée de Fourier discrète
 Traitement du signal avec Scilab : la transformée de Fourier discrète L objectif de cette séance est de valider l expression de la transformée de Fourier Discrète (TFD), telle que peut la déterminer un
Traitement du signal avec Scilab : la transformée de Fourier discrète L objectif de cette séance est de valider l expression de la transformée de Fourier Discrète (TFD), telle que peut la déterminer un
Exemple d acquisition automatique de mesures sur une maquette de contrôle actif de vibrations
 Exemple d acquisition automatique de mesures sur une maquette de contrôle actif de vibrations Valérie Pommier-Budinger Bernard Mouton - Francois Vincent ISAE Institut Supérieur de l Aéronautique et de
Exemple d acquisition automatique de mesures sur une maquette de contrôle actif de vibrations Valérie Pommier-Budinger Bernard Mouton - Francois Vincent ISAE Institut Supérieur de l Aéronautique et de
Communication parlée L2F01 TD 7 Phonétique acoustique (1) Jiayin GAO <[email protected]> 20 mars 2014
 Jiayin GAO <jiayin.gao@univ-paris3.fr> 20 mars 2014") Communication parlée L2F01 TD 7 Phonétique acoustique (1) Jiayin GAO 20 mars 2014 La phonétique acoustique La phonétique acoustique étudie les propriétés physiques du signal
Communication parlée L2F01 TD 7 Phonétique acoustique (1) Jiayin GAO 20 mars 2014 La phonétique acoustique La phonétique acoustique étudie les propriétés physiques du signal
Notes du cours MTH1101 Calcul I Partie II: fonctions de plusieurs variables
 Notes du cours MTH1101 Calcul I Partie II: fonctions de plusieurs variables Guy Desaulniers Département de mathématiques et de génie industriel École Polytechnique de Montréal Automne 2014 Table des matières
Notes du cours MTH1101 Calcul I Partie II: fonctions de plusieurs variables Guy Desaulniers Département de mathématiques et de génie industriel École Polytechnique de Montréal Automne 2014 Table des matières
3.2. Matlab/Simulink. 3.2.1. Généralités
 3.2. Matlab/Simulink 3.2.1. Généralités Il s agit d un logiciel parfaitement dédié à la résolution de problèmes d'analyse numérique ou de traitement du signal. Il permet d'effectuer des calculs matriciels,
3.2. Matlab/Simulink 3.2.1. Généralités Il s agit d un logiciel parfaitement dédié à la résolution de problèmes d'analyse numérique ou de traitement du signal. Il permet d'effectuer des calculs matriciels,
TP: Représentation des signaux binaires. 1 Simulation d un message binaire - Codage en ligne
 Objectifs : Ce TP est relatif aux différentes méthodes de codage d une information binaire, et à la transmission en bande de base de cette information. Les grandes lignes de ce TP sont l étude des méthodes
Objectifs : Ce TP est relatif aux différentes méthodes de codage d une information binaire, et à la transmission en bande de base de cette information. Les grandes lignes de ce TP sont l étude des méthodes
3 Approximation de solutions d équations
 3 Approximation de solutions d équations Une équation scalaire a la forme générale f(x) =0où f est une fonction de IR dans IR. Un système de n équations à n inconnues peut aussi se mettre sous une telle
3 Approximation de solutions d équations Une équation scalaire a la forme générale f(x) =0où f est une fonction de IR dans IR. Un système de n équations à n inconnues peut aussi se mettre sous une telle
LISACode. Un simulateur opérationnel pour LISA. Antoine PETITEAU LISAFrance - le 16 mai 2006
 LISACode Un simulateur opérationnel pour LISA Antoine PETITEAU LISAFrance - le 16 mai 2006 Plan Rappel sur LISACode. Validation du simulateur. Possibilités du simulateur. Résultats obtenus. Bruit de confusion.
LISACode Un simulateur opérationnel pour LISA Antoine PETITEAU LISAFrance - le 16 mai 2006 Plan Rappel sur LISACode. Validation du simulateur. Possibilités du simulateur. Résultats obtenus. Bruit de confusion.
Communications numériques
 Communications numériques 1. Modulation numérique (a) message numérique/signal numérique (b) transmission binaire/m-aire en bande de base (c) modulation sur fréquence porteuse (d) paramètres, limite fondamentale
Communications numériques 1. Modulation numérique (a) message numérique/signal numérique (b) transmission binaire/m-aire en bande de base (c) modulation sur fréquence porteuse (d) paramètres, limite fondamentale
Quantification Scalaire et Prédictive
 Quantification Scalaire et Prédictive Marco Cagnazzo Département Traitement du Signal et des Images TELECOM ParisTech 7 Décembre 2012 M. Cagnazzo Quantification Scalaire et Prédictive 1/64 Plan Introduction
Quantification Scalaire et Prédictive Marco Cagnazzo Département Traitement du Signal et des Images TELECOM ParisTech 7 Décembre 2012 M. Cagnazzo Quantification Scalaire et Prédictive 1/64 Plan Introduction
Premier ordre Expression de la fonction de transfert : H(p) = K
 = K") Premier ordre Expression de la fonction de transfert : H(p) = K + τ.p. K.e τ K.e /τ τ 86% 95% 63% 5% τ τ 3τ 4τ 5τ Temps Caractéristiques remarquables de la réponse à un échelon e(t) = e.u(t). La valeur
Premier ordre Expression de la fonction de transfert : H(p) = K + τ.p. K.e τ K.e /τ τ 86% 95% 63% 5% τ τ 3τ 4τ 5τ Temps Caractéristiques remarquables de la réponse à un échelon e(t) = e.u(t). La valeur
Complément d information concernant la fiche de concordance
 Sommaire SAMEDI 0 DÉCEMBRE 20 Vous trouverez dans ce dossier les documents correspondants à ce que nous allons travailler aujourd hui : La fiche de concordance pour le DAEU ; Page 2 Un rappel de cours
Sommaire SAMEDI 0 DÉCEMBRE 20 Vous trouverez dans ce dossier les documents correspondants à ce que nous allons travailler aujourd hui : La fiche de concordance pour le DAEU ; Page 2 Un rappel de cours
Chapitre 0 Introduction à la cinématique
 Chapitre 0 Introduction à la cinématique Plan Vitesse, accélération Coordonnées polaires Exercices corrigés Vitesse, Accélération La cinématique est l étude du mouvement Elle suppose donc l existence à
Chapitre 0 Introduction à la cinématique Plan Vitesse, accélération Coordonnées polaires Exercices corrigés Vitesse, Accélération La cinématique est l étude du mouvement Elle suppose donc l existence à
Chafa Azzedine - Faculté de Physique U.S.T.H.B 1
 Chafa Azzedine - Faculté de Physique U.S.T.H.B 1 Définition: La cinématique est une branche de la mécanique qui étudie les mouements des corps dans l espace en fonction du temps indépendamment des causes
Chafa Azzedine - Faculté de Physique U.S.T.H.B 1 Définition: La cinématique est une branche de la mécanique qui étudie les mouements des corps dans l espace en fonction du temps indépendamment des causes
Didier Pietquin. Timbre et fréquence : fondamentale et harmoniques
 Didier Pietquin Timbre et fréquence : fondamentale et harmoniques Que sont les notions de fréquence fondamentale et d harmoniques? C est ce que nous allons voir dans cet article. 1. Fréquence Avant d entamer
Didier Pietquin Timbre et fréquence : fondamentale et harmoniques Que sont les notions de fréquence fondamentale et d harmoniques? C est ce que nous allons voir dans cet article. 1. Fréquence Avant d entamer
1.1.1 Signaux à variation temporelle continue-discrète
 Chapitre Base des Signaux. Classi cation des signaux.. Signaux à variation temporelle continue-discrète Les signaux à variation temporelle continue sont des fonctions d une ou plusieurs variables continues
Chapitre Base des Signaux. Classi cation des signaux.. Signaux à variation temporelle continue-discrète Les signaux à variation temporelle continue sont des fonctions d une ou plusieurs variables continues
Circuits RL et RC. Chapitre 5. 5.1 Inductance
 Chapitre 5 Circuits RL et RC Ce chapitre présente les deux autres éléments linéaires des circuits électriques : l inductance et la capacitance. On verra le comportement de ces deux éléments, et ensuite
Chapitre 5 Circuits RL et RC Ce chapitre présente les deux autres éléments linéaires des circuits électriques : l inductance et la capacitance. On verra le comportement de ces deux éléments, et ensuite
Mini_guide_Isis_v6.doc le 10/02/2005 Page 1/15
 1 Démarrer... 2 1.1 L écran Isis... 2 1.2 Les barres d outils... 3 1.2.1 Les outils d édition... 3 1.2.2 Les outils de sélection de mode... 4 1.2.3 Les outils d orientation... 4 2 Quelques actions... 5
1 Démarrer... 2 1.1 L écran Isis... 2 1.2 Les barres d outils... 3 1.2.1 Les outils d édition... 3 1.2.2 Les outils de sélection de mode... 4 1.2.3 Les outils d orientation... 4 2 Quelques actions... 5
ANALYSE NUMERIQUE ET OPTIMISATION. Une introduction à la modélisation mathématique et à la simulation numérique
 1 ANALYSE NUMERIQUE ET OPTIMISATION Une introduction à la modélisation mathématique et à la simulation numérique G. ALLAIRE 28 Janvier 2014 CHAPITRE I Analyse numérique: amphis 1 à 12. Optimisation: amphis
1 ANALYSE NUMERIQUE ET OPTIMISATION Une introduction à la modélisation mathématique et à la simulation numérique G. ALLAIRE 28 Janvier 2014 CHAPITRE I Analyse numérique: amphis 1 à 12. Optimisation: amphis
Automatique des systèmes linéaires continus
 MINISTERE DE L ENSEIGNEMENT SUPERIEUR ET DE LA RECHERCHE SCIENTIFIQUE UNIVERSITE DES SCIENCES ET DE LA TECHNOLOGIE D ORAN-M B- FACULTE DE GENIE ELECTRIQUE DEPARTEMENT D AUTOMATIQUE Polycopié de : Automatique
MINISTERE DE L ENSEIGNEMENT SUPERIEUR ET DE LA RECHERCHE SCIENTIFIQUE UNIVERSITE DES SCIENCES ET DE LA TECHNOLOGIE D ORAN-M B- FACULTE DE GENIE ELECTRIQUE DEPARTEMENT D AUTOMATIQUE Polycopié de : Automatique
Centre d'etudes Nucléaires de Fontenay-aux-Roses Direction des Piles Atomiques Département des Etudes de Piles
 CEA-N-1195 Note CEA-N-1195 Centre d'etudes Nucléaires de Fontenay-aux-Roses Direction des Piles Atomiques Département des Etudes de Piles Service d'etudes de Protections de Piles PROPAGATION DES NEUTRONS
CEA-N-1195 Note CEA-N-1195 Centre d'etudes Nucléaires de Fontenay-aux-Roses Direction des Piles Atomiques Département des Etudes de Piles Service d'etudes de Protections de Piles PROPAGATION DES NEUTRONS
Méthodes de quadrature. Polytech Paris-UPMC. - p. 1/48
 Méthodes de Polytech Paris-UPMC - p. 1/48 Polynôme d interpolation de Preuve et polynôme de Calcul de l erreur d interpolation Étude de la formule d erreur Autres méthodes - p. 2/48 Polynôme d interpolation
Méthodes de Polytech Paris-UPMC - p. 1/48 Polynôme d interpolation de Preuve et polynôme de Calcul de l erreur d interpolation Étude de la formule d erreur Autres méthodes - p. 2/48 Polynôme d interpolation
Automatique Linéaire 1 1A ISMIN
 Automatique linéaire 1 J.M. Dutertre 2014 Sommaire. I. Introduction, définitions, position du problème. p. 3 I.1. Introduction. p. 3 I.2. Définitions. p. 5 I.3. Position du problème. p. 6 II. Modélisation
Automatique linéaire 1 J.M. Dutertre 2014 Sommaire. I. Introduction, définitions, position du problème. p. 3 I.1. Introduction. p. 3 I.2. Définitions. p. 5 I.3. Position du problème. p. 6 II. Modélisation
Dérivation CONTENUS CAPACITÉS ATTENDUES COMMENTAIRES
 Capitre 4 Dérivation Ce que dit le programme : CONTENUS CAPACITÉS ATTENDUES COMMENTAIRES Dérivation Nombre dérivé d une fonction en un point. Tangente à la courbe représentative d une fonction dérivable
Capitre 4 Dérivation Ce que dit le programme : CONTENUS CAPACITÉS ATTENDUES COMMENTAIRES Dérivation Nombre dérivé d une fonction en un point. Tangente à la courbe représentative d une fonction dérivable
Petite introduction à l utilisation de Matlab/Simulink pour l Automatique
 Petite introduction à l utilisation de Matlab/Simulink pour l Automatique Ces quelques pages sont consacrées à l'illustration des cours d'automatique (asservissements linéaires continus) à l'aide du logiciel
Petite introduction à l utilisation de Matlab/Simulink pour l Automatique Ces quelques pages sont consacrées à l'illustration des cours d'automatique (asservissements linéaires continus) à l'aide du logiciel
Le calculateur numérique pour la commande des processus
 Le calculateur numérique pour la commande des processus par Daniel JAUME Maître de Conférences au Laboratoire d Automatique du Conservatoire National des Arts et Métiers et Michel VERGÉ Professeur des
Le calculateur numérique pour la commande des processus par Daniel JAUME Maître de Conférences au Laboratoire d Automatique du Conservatoire National des Arts et Métiers et Michel VERGÉ Professeur des
INTRODUCTION A L ELECTRONIQUE NUMERIQUE ECHANTILLONNAGE ET QUANTIFICATION I. ARCHITECTURE DE L ELECRONIQUE NUMERIQUE
 INTRODUCTION A L ELECTRONIQUE NUMERIQUE ECHANTILLONNAGE ET QUANTIFICATION I. ARCHITECTURE DE L ELECRONIQUE NUMERIQUE Le schéma synoptique ci-dessous décrit les différentes étapes du traitement numérique
INTRODUCTION A L ELECTRONIQUE NUMERIQUE ECHANTILLONNAGE ET QUANTIFICATION I. ARCHITECTURE DE L ELECRONIQUE NUMERIQUE Le schéma synoptique ci-dessous décrit les différentes étapes du traitement numérique
Compatibilité Électromagnétique
 Compatibilité Électromagnétique notions générales et applications à l électronique de puissance Ir. Stéphane COETS 18 mai 2005 Journée d étude en Électronique de Puissance 1 Plan de l exposé La Compatibilité
Compatibilité Électromagnétique notions générales et applications à l électronique de puissance Ir. Stéphane COETS 18 mai 2005 Journée d étude en Électronique de Puissance 1 Plan de l exposé La Compatibilité
Trépier avec règle, ressort à boudin, chronomètre, 5 masses de 50 g.
 PHYSQ 130: Hooke 1 LOI DE HOOKE: CAS DU RESSORT 1 Introduction La loi de Hooke est fondamentale dans l étude du mouvement oscillatoire. Elle est utilisée, entre autres, dans les théories décrivant les
PHYSQ 130: Hooke 1 LOI DE HOOKE: CAS DU RESSORT 1 Introduction La loi de Hooke est fondamentale dans l étude du mouvement oscillatoire. Elle est utilisée, entre autres, dans les théories décrivant les
Chapitre 3. Mesures stationnaires. et théorèmes de convergence
 Chapitre 3 Mesures stationnaires et théorèmes de convergence Christiane Cocozza-Thivent, Université de Marne-la-Vallée p.1 I. Mesures stationnaires Christiane Cocozza-Thivent, Université de Marne-la-Vallée
Chapitre 3 Mesures stationnaires et théorèmes de convergence Christiane Cocozza-Thivent, Université de Marne-la-Vallée p.1 I. Mesures stationnaires Christiane Cocozza-Thivent, Université de Marne-la-Vallée
Exercices - Fonctions de plusieurs variables : corrigé. Pour commencer
 Pour commencer Exercice 1 - Ensembles de définition - Première année - 1. Le logarithme est défini si x + y > 0. On trouve donc le demi-plan supérieur délimité par la droite d équation x + y = 0.. 1 xy
Pour commencer Exercice 1 - Ensembles de définition - Première année - 1. Le logarithme est défini si x + y > 0. On trouve donc le demi-plan supérieur délimité par la droite d équation x + y = 0.. 1 xy
CHAPITRE V. Théorie de l échantillonnage et de la quantification
 CHAPITRE V Théorie de l échantillonnage et de la quantification Olivier FRANÇAIS, SOMMAIRE I INTRODUCTION... 3 II THÉORIE DE L ÉCHANTILLONNAGE... 3 II. ACQUISITION DES SIGNAUX... 3 II. MODÉLISATION DE
CHAPITRE V Théorie de l échantillonnage et de la quantification Olivier FRANÇAIS, SOMMAIRE I INTRODUCTION... 3 II THÉORIE DE L ÉCHANTILLONNAGE... 3 II. ACQUISITION DES SIGNAUX... 3 II. MODÉLISATION DE
M1107 : Initiation à la mesure du signal. T_MesSig
 1/81 M1107 : Initiation à la mesure du signal T_MesSig Frédéric PAYAN IUT Nice Côte d Azur - Département R&T Université de Nice Sophia Antipolis [email protected] 15 octobre 2014 2/81 Curriculum
1/81 M1107 : Initiation à la mesure du signal T_MesSig Frédéric PAYAN IUT Nice Côte d Azur - Département R&T Université de Nice Sophia Antipolis [email protected] 15 octobre 2014 2/81 Curriculum
Continuité et dérivabilité d une fonction
 DERNIÈRE IMPRESSIN LE 7 novembre 014 à 10:3 Continuité et dérivabilité d une fonction Table des matières 1 Continuité d une fonction 1.1 Limite finie en un point.......................... 1. Continuité
DERNIÈRE IMPRESSIN LE 7 novembre 014 à 10:3 Continuité et dérivabilité d une fonction Table des matières 1 Continuité d une fonction 1.1 Limite finie en un point.......................... 1. Continuité
Chapitre 1 Régime transitoire dans les systèmes physiques
 Chapitre 1 Régime transitoire dans les systèmes physiques Savoir-faire théoriques (T) : Écrire l équation différentielle associée à un système physique ; Faire apparaître la constante de temps ; Tracer
Chapitre 1 Régime transitoire dans les systèmes physiques Savoir-faire théoriques (T) : Écrire l équation différentielle associée à un système physique ; Faire apparaître la constante de temps ; Tracer
Equations différentielles linéaires à coefficients constants
 Equations différentielles linéaires à coefficients constants Cas des équations d ordre 1 et 2 Cours de : Martine Arrou-Vignod Médiatisation : Johan Millaud Département RT de l IUT de Vélizy Mai 2007 I
Equations différentielles linéaires à coefficients constants Cas des équations d ordre 1 et 2 Cours de : Martine Arrou-Vignod Médiatisation : Johan Millaud Département RT de l IUT de Vélizy Mai 2007 I
Introduction. Mathématiques Quantiques Discrètes
 Mathématiques Quantiques Discrètes Didier Robert Facultés des Sciences et Techniques Laboratoire de Mathématiques Jean Leray, Université de Nantes email: v-nantes.fr Commençons par expliquer le titre.
Mathématiques Quantiques Discrètes Didier Robert Facultés des Sciences et Techniques Laboratoire de Mathématiques Jean Leray, Université de Nantes email: v-nantes.fr Commençons par expliquer le titre.
INTERPRÉTATION ET ANOMALIES DE LA PROSPECTION À RÉSONANCE MAGNÉTIQUE (MRS)
") 1 Géologie, géotechnique, risques naturels, hydrogéologie, environnement et services scientifico-techniques INTERPRÉTATION ET ANOMALIES DE LA PROSPECTION À RÉSONANCE MAGNÉTIQUE (MRS) INTERPRETATION DES
1 Géologie, géotechnique, risques naturels, hydrogéologie, environnement et services scientifico-techniques INTERPRÉTATION ET ANOMALIES DE LA PROSPECTION À RÉSONANCE MAGNÉTIQUE (MRS) INTERPRETATION DES
http://www.u-bourgogne.fr/monge/e.busvelle/teaching.php
 TP1 Traitement numérique du son 1 Introduction Le but de ce TP est de mettre en pratique les notions de traitement numérique vues en cours, TDs et dans le précédent TP. On se focalisera sur le traitement
TP1 Traitement numérique du son 1 Introduction Le but de ce TP est de mettre en pratique les notions de traitement numérique vues en cours, TDs et dans le précédent TP. On se focalisera sur le traitement
Exercice 1. Exercice n 1 : Déséquilibre mécanique
 Exercice 1 1. a) Un mobile peut-il avoir une accélération non nulle à un instant où sa vitesse est nulle? donner un exemple illustrant la réponse. b) Un mobile peut-il avoir une accélération de direction
Exercice 1 1. a) Un mobile peut-il avoir une accélération non nulle à un instant où sa vitesse est nulle? donner un exemple illustrant la réponse. b) Un mobile peut-il avoir une accélération de direction
LA COUCHE PHYSIQUE EST LA COUCHE par laquelle l information est effectivemnt transmise.
 M Informatique Réseaux Cours bis Couche Physique Notes de Cours LA COUCHE PHYSIQUE EST LA COUCHE par laquelle l information est effectivemnt transmise. Les technologies utilisées sont celles du traitement
M Informatique Réseaux Cours bis Couche Physique Notes de Cours LA COUCHE PHYSIQUE EST LA COUCHE par laquelle l information est effectivemnt transmise. Les technologies utilisées sont celles du traitement
Chapitre 2 : communications numériques.
 Chapitre 2 : communications numériques. 1) généralités sur les communications numériques. A) production d'un signal numérique : transformation d'un signal analogique en une suite d'éléments binaires notés
Chapitre 2 : communications numériques. 1) généralités sur les communications numériques. A) production d'un signal numérique : transformation d'un signal analogique en une suite d'éléments binaires notés
Commun à tous les candidats
 EXERCICE 3 (9 points ) Commun à tous les candidats On s intéresse à des courbes servant de modèle à la distribution de la masse salariale d une entreprise. Les fonctions f associées définies sur l intervalle
EXERCICE 3 (9 points ) Commun à tous les candidats On s intéresse à des courbes servant de modèle à la distribution de la masse salariale d une entreprise. Les fonctions f associées définies sur l intervalle
De même, le périmètre P d un cercle de rayon 1 vaut P = 2π (par définition de π). Mais, on peut démontrer (difficilement!) que
. Mais, on peut démontrer (difficilement!) que") Introduction. On suppose connus les ensembles N (des entiers naturels), Z des entiers relatifs et Q (des nombres rationnels). On s est rendu compte, depuis l antiquité, que l on ne peut pas tout mesurer
Introduction. On suppose connus les ensembles N (des entiers naturels), Z des entiers relatifs et Q (des nombres rationnels). On s est rendu compte, depuis l antiquité, que l on ne peut pas tout mesurer
1 Démarrer... 3 1.1 L écran Isis...3 1.2 La boite à outils...3 1.2.1 Mode principal... 4 1.2.2 Mode gadget...4 1.2.3 Mode graphique...
 1 Démarrer... 3 1.1 L écran Isis...3 1.2 La boite à outils...3 1.2.1 Mode principal... 4 1.2.2 Mode gadget...4 1.2.3 Mode graphique... 4 2 Quelques actions... 5 2.1 Ouvrir un document existant...5 2.2
1 Démarrer... 3 1.1 L écran Isis...3 1.2 La boite à outils...3 1.2.1 Mode principal... 4 1.2.2 Mode gadget...4 1.2.3 Mode graphique... 4 2 Quelques actions... 5 2.1 Ouvrir un document existant...5 2.2
Le Collège de France crée une chaire pérenne d Informatique, Algorithmes, machines et langages, et nomme le Pr Gérard BERRY titulaire
 Communiquédepresse Mars2013 LeCollègedeFrancecréeunechairepérenned Informatique, Algorithmes,machinesetlangages, etnommeleprgérardberrytitulaire Leçoninauguralele28mars2013 2009avait marquéunpas importantdans
Communiquédepresse Mars2013 LeCollègedeFrancecréeunechairepérenned Informatique, Algorithmes,machinesetlangages, etnommeleprgérardberrytitulaire Leçoninauguralele28mars2013 2009avait marquéunpas importantdans
TD de Physique n o 1 : Mécanique du point
 E.N.S. de Cachan Département E.E.A. M FE 3 e année Phsique appliquée 011-01 TD de Phsique n o 1 : Mécanique du point Exercice n o 1 : Trajectoire d un ballon-sonde Un ballon-sonde M, lâché au niveau du
E.N.S. de Cachan Département E.E.A. M FE 3 e année Phsique appliquée 011-01 TD de Phsique n o 1 : Mécanique du point Exercice n o 1 : Trajectoire d un ballon-sonde Un ballon-sonde M, lâché au niveau du
Mini_guide_Isis.pdf le 23/09/2001 Page 1/14
 1 Démarrer...2 1.1 L écran Isis...2 1.2 La boite à outils...2 1.2.1 Mode principal...3 1.2.2 Mode gadgets...3 1.2.3 Mode graphique...3 2 Quelques actions...4 2.1 Ouvrir un document existant...4 2.2 Sélectionner
1 Démarrer...2 1.1 L écran Isis...2 1.2 La boite à outils...2 1.2.1 Mode principal...3 1.2.2 Mode gadgets...3 1.2.3 Mode graphique...3 2 Quelques actions...4 2.1 Ouvrir un document existant...4 2.2 Sélectionner
8.1 Généralités sur les fonctions de plusieurs variables réelles. f : R 2 R (x, y) 1 x 2 y 2
 1 x 2 y 2") Chapitre 8 Fonctions de plusieurs variables 8.1 Généralités sur les fonctions de plusieurs variables réelles Définition. Une fonction réelle de n variables réelles est une application d une partie de R
Chapitre 8 Fonctions de plusieurs variables 8.1 Généralités sur les fonctions de plusieurs variables réelles Définition. Une fonction réelle de n variables réelles est une application d une partie de R
NOTICE DOUBLE DIPLÔME
 NOTICE DOUBLE DIPLÔME MINES ParisTech / HEC MINES ParisTech/ AgroParisTech Diplômes obtenus : Diplôme d ingénieur de l Ecole des Mines de Paris Diplôme de HEC Paris Ou Diplôme d ingénieur de l Ecole des
NOTICE DOUBLE DIPLÔME MINES ParisTech / HEC MINES ParisTech/ AgroParisTech Diplômes obtenus : Diplôme d ingénieur de l Ecole des Mines de Paris Diplôme de HEC Paris Ou Diplôme d ingénieur de l Ecole des
- MANIP 2 - APPLICATION À LA MESURE DE LA VITESSE DE LA LUMIÈRE
 - MANIP 2 - - COÏNCIDENCES ET MESURES DE TEMPS - APPLICATION À LA MESURE DE LA VITESSE DE LA LUMIÈRE L objectif de cette manipulation est d effectuer une mesure de la vitesse de la lumière sur une «base
- MANIP 2 - - COÏNCIDENCES ET MESURES DE TEMPS - APPLICATION À LA MESURE DE LA VITESSE DE LA LUMIÈRE L objectif de cette manipulation est d effectuer une mesure de la vitesse de la lumière sur une «base
Chapitre 5: Oscillations d un pendule élastique horizontal
 1 re B et C 5 Oscillations d'un pendule élastique horizontal 40 Chapitre 5: Oscillations d un pendule élastique horizontal 1. Définitions a) Oscillateur écanique * Un systèe écanique qui effectue un ouveent
1 re B et C 5 Oscillations d'un pendule élastique horizontal 40 Chapitre 5: Oscillations d un pendule élastique horizontal 1. Définitions a) Oscillateur écanique * Un systèe écanique qui effectue un ouveent
Chapitre I La fonction transmission
 Chapitre I La fonction transmission 1. Terminologies 1.1 Mode guidé / non guidé Le signal est le vecteur de l information à transmettre. La transmission s effectue entre un émetteur et un récepteur reliés
Chapitre I La fonction transmission 1. Terminologies 1.1 Mode guidé / non guidé Le signal est le vecteur de l information à transmettre. La transmission s effectue entre un émetteur et un récepteur reliés
IV - Programme détaillé par matière (1 fiche détaillée par matière)
") IV - Programme détaillé par matière (1 fiche détaillée par matière) Matière : Asservissement numérique Introduction aux systèmes échantillonnés (signal échantillonné, échantillonnage idéal, transformation
IV - Programme détaillé par matière (1 fiche détaillée par matière) Matière : Asservissement numérique Introduction aux systèmes échantillonnés (signal échantillonné, échantillonnage idéal, transformation
Module : systèmes asservis linéaires
 BS2EL - Physique appliquée Module : systèmes asservis linéaires Diaporamas : les asservissements Résumé de cours 1- Structure d un système asservi 2- Transmittances en boucle ouverte et ermée 3- Stabilité
BS2EL - Physique appliquée Module : systèmes asservis linéaires Diaporamas : les asservissements Résumé de cours 1- Structure d un système asservi 2- Transmittances en boucle ouverte et ermée 3- Stabilité
Une application de méthodes inverses en astrophysique : l'analyse de l'histoire de la formation d'étoiles dans les galaxies
 Une application de méthodes inverses en astrophysique : l'analyse de l'histoire de la formation d'étoiles dans les galaxies Ariane Lançon (Observatoire de Strasbourg) en collaboration avec: Jean-Luc Vergely,
Une application de méthodes inverses en astrophysique : l'analyse de l'histoire de la formation d'étoiles dans les galaxies Ariane Lançon (Observatoire de Strasbourg) en collaboration avec: Jean-Luc Vergely,
www.h-k.fr/publications/objectif-agregation
 «Sur C, tout est connexe!» www.h-k.fr/publications/objectif-agregation L idée de cette note est de montrer que, contrairement à ce qui se passe sur R, «sur C, tout est connexe». Cet abus de langage se
«Sur C, tout est connexe!» www.h-k.fr/publications/objectif-agregation L idée de cette note est de montrer que, contrairement à ce qui se passe sur R, «sur C, tout est connexe». Cet abus de langage se
* très facile ** facile *** difficulté moyenne **** difficile ***** très difficile I : Incontournable
 Eo7 Fonctions de plusieurs variables Eercices de Jean-Louis Rouget Retrouver aussi cette fiche sur wwwmaths-francefr * très facile ** facile *** difficulté moenne **** difficile ***** très difficile I
Eo7 Fonctions de plusieurs variables Eercices de Jean-Louis Rouget Retrouver aussi cette fiche sur wwwmaths-francefr * très facile ** facile *** difficulté moenne **** difficile ***** très difficile I
I. Polynômes de Tchebychev
 Première épreuve CCP filière MP I. Polynômes de Tchebychev ( ) 1.a) Tout réel θ vérifie cos(nθ) = Re ((cos θ + i sin θ) n ) = Re Cn k (cos θ) n k i k (sin θ) k Or i k est réel quand k est pair et imaginaire
Première épreuve CCP filière MP I. Polynômes de Tchebychev ( ) 1.a) Tout réel θ vérifie cos(nθ) = Re ((cos θ + i sin θ) n ) = Re Cn k (cos θ) n k i k (sin θ) k Or i k est réel quand k est pair et imaginaire
TP Modulation Démodulation BPSK
 I- INTRODUCTION : TP Modulation Démodulation BPSK La modulation BPSK est une modulation de phase (Phase Shift Keying = saut discret de phase) par signal numérique binaire (Binary). La phase d une porteuse
I- INTRODUCTION : TP Modulation Démodulation BPSK La modulation BPSK est une modulation de phase (Phase Shift Keying = saut discret de phase) par signal numérique binaire (Binary). La phase d une porteuse
CONCOURS COMMUN 2010 PHYSIQUE
 CONCOUS COMMUN SUJET A DES ÉCOLES DES MINES D ALBI, ALÈS, DOUAI, NANTES Épreuve de Physique-Chimie (toutes filières) Corrigé Barème total points : Physique points - Chimie 68 points PHYSIQUE Partie A :
CONCOUS COMMUN SUJET A DES ÉCOLES DES MINES D ALBI, ALÈS, DOUAI, NANTES Épreuve de Physique-Chimie (toutes filières) Corrigé Barème total points : Physique points - Chimie 68 points PHYSIQUE Partie A :
Rapport de projet de fin d étude
 Rapport de projet de fin d étude Réalisé Par : Encadré Par : -Soumya sekhsokh Mohammed RABI -Kawtar oukili Année Universitaire 2010/2011 ETUDE D UNE BOUCLE DE REGULATION DE NIVEAU : - IMPLEMENTATION DU
Rapport de projet de fin d étude Réalisé Par : Encadré Par : -Soumya sekhsokh Mohammed RABI -Kawtar oukili Année Universitaire 2010/2011 ETUDE D UNE BOUCLE DE REGULATION DE NIVEAU : - IMPLEMENTATION DU
Modèles à Événements Discrets. Réseaux de Petri Stochastiques
 Modèles à Événements Discrets Réseaux de Petri Stochastiques Table des matières 1 Chaînes de Markov Définition formelle Idée générale Discrete Time Markov Chains Continuous Time Markov Chains Propriétés
Modèles à Événements Discrets Réseaux de Petri Stochastiques Table des matières 1 Chaînes de Markov Définition formelle Idée générale Discrete Time Markov Chains Continuous Time Markov Chains Propriétés
UE 503 L3 MIAGE. Initiation Réseau et Programmation Web La couche physique. A. Belaïd
 UE 503 L3 MIAGE Initiation Réseau et Programmation Web La couche physique A. Belaïd [email protected] http://www.loria.fr/~abelaid/ Année Universitaire 2011/2012 2 Le Modèle OSI La couche physique ou le
UE 503 L3 MIAGE Initiation Réseau et Programmation Web La couche physique A. Belaïd [email protected] http://www.loria.fr/~abelaid/ Année Universitaire 2011/2012 2 Le Modèle OSI La couche physique ou le
CAPTEURS - CHAINES DE MESURES
 CAPTEURS - CHAINES DE MESURES Pierre BONNET Pierre Bonnet Master GSI - Capteurs Chaînes de Mesures 1 Plan du Cours Propriétés générales des capteurs Notion de mesure Notion de capteur: principes, classes,
CAPTEURS - CHAINES DE MESURES Pierre BONNET Pierre Bonnet Master GSI - Capteurs Chaînes de Mesures 1 Plan du Cours Propriétés générales des capteurs Notion de mesure Notion de capteur: principes, classes,
Chapitre 4: Dérivée d'une fonction et règles de calcul
 DERIVEES ET REGLES DE CALCULS 69 Chapitre 4: Dérivée d'une fonction et règles de calcul Prérequis: Généralités sur les fonctions, Introduction dérivée Requis pour: Croissance, Optimisation, Études de fct.
DERIVEES ET REGLES DE CALCULS 69 Chapitre 4: Dérivée d'une fonction et règles de calcul Prérequis: Généralités sur les fonctions, Introduction dérivée Requis pour: Croissance, Optimisation, Études de fct.
Calcul différentiel sur R n Première partie
 Calcul différentiel sur R n Première partie Université De Metz 2006-2007 1 Définitions générales On note L(R n, R m ) l espace vectoriel des applications linéaires de R n dans R m. Définition 1.1 (différentiabilité
Calcul différentiel sur R n Première partie Université De Metz 2006-2007 1 Définitions générales On note L(R n, R m ) l espace vectoriel des applications linéaires de R n dans R m. Définition 1.1 (différentiabilité
Polynômes à plusieurs variables. Résultant
 Polynômes à plusieurs variables. Résultant Christophe Ritzenthaler 1 Relations coefficients-racines. Polynômes symétriques Issu de [MS] et de [Goz]. Soit A un anneau intègre. Définition 1.1. Soit a A \
Polynômes à plusieurs variables. Résultant Christophe Ritzenthaler 1 Relations coefficients-racines. Polynômes symétriques Issu de [MS] et de [Goz]. Soit A un anneau intègre. Définition 1.1. Soit a A \
GENERALITES SUR LA MESURE DE TEMPERATURE
 Distributeur exclusif de GENERALITES SUR LA MESURE DE TEMPERATURE INTRODUCTION...2 GENERALITES SUR LA MESURE DE TEMPERATURE...2 La température...2 Unités de mesure de température...3 Echelle de température...3
Distributeur exclusif de GENERALITES SUR LA MESURE DE TEMPERATURE INTRODUCTION...2 GENERALITES SUR LA MESURE DE TEMPERATURE...2 La température...2 Unités de mesure de température...3 Echelle de température...3
ECTS INFORMATIQUE ET RESEAUX POUR L INDUSTRIE ET LES SERVICES TECHNIQUES
 ECTS INFORMATIQUE ET RESEAUX POUR L INDUSTRIE ET LES SERVICES TECHNIQUES CHAPITRES PAGES I DEFINITION 3 II CONTEXTE PROFESSIONNEL 3 HORAIRE HEBDOMADAIRE 1 er ET 2 ème ANNEE 4 FRANÇAIS 4 ANGLAIS 5 MATHEMATIQUES
ECTS INFORMATIQUE ET RESEAUX POUR L INDUSTRIE ET LES SERVICES TECHNIQUES CHAPITRES PAGES I DEFINITION 3 II CONTEXTE PROFESSIONNEL 3 HORAIRE HEBDOMADAIRE 1 er ET 2 ème ANNEE 4 FRANÇAIS 4 ANGLAIS 5 MATHEMATIQUES
Q6 : Comment calcule t-on l intensité sonore à partir du niveau d intensité?
 EXERCICE 1 : QUESTION DE COURS Q1 : Qu est ce qu une onde progressive? Q2 : Qu est ce qu une onde mécanique? Q3 : Qu elle est la condition pour qu une onde soit diffractée? Q4 : Quelles sont les différentes
EXERCICE 1 : QUESTION DE COURS Q1 : Qu est ce qu une onde progressive? Q2 : Qu est ce qu une onde mécanique? Q3 : Qu elle est la condition pour qu une onde soit diffractée? Q4 : Quelles sont les différentes
Anciens plug-ins d effets VST
 Anciens plug-ins d effets VST - 1 - - 2 - Manuel d utilisation de Ernst Nathorst-Böös, Ludvig Carlson, Anders Nordmark, Roger Wiklander Traduction: C.I.N.C. Contrôle Qualité : K. Albrecht, C. Bachmann,
Anciens plug-ins d effets VST - 1 - - 2 - Manuel d utilisation de Ernst Nathorst-Böös, Ludvig Carlson, Anders Nordmark, Roger Wiklander Traduction: C.I.N.C. Contrôle Qualité : K. Albrecht, C. Bachmann,
Cours d Analyse. Fonctions de plusieurs variables
 Cours d Analyse Fonctions de plusieurs variables Licence 1ère année 2007/2008 Nicolas Prioux Université de Marne-la-Vallée Table des matières 1 Notions de géométrie dans l espace et fonctions à deux variables........
Cours d Analyse Fonctions de plusieurs variables Licence 1ère année 2007/2008 Nicolas Prioux Université de Marne-la-Vallée Table des matières 1 Notions de géométrie dans l espace et fonctions à deux variables........