Recalage d images 2D et 3D
|
|
|
- Cyprien Larivière
- il y a 9 ans
- Total affichages :
Transcription

1 Recalage d images 2D et 3D Isabelle Bloch bloch Ecole Nationale Supérieure des Télécommunications - CNRS UMR 5141 LTCI Paris - France Recalage p.1/35

2 Introduction Intérêt et nécessité du recalage Imagerie multi-modale dans différents domaines Informations complémentaires Prétraitement pour la fusion Plus d information et meilleures décisions Recalage p.2/35

3 Définition du recalage Mise en correspondance spatiale Formulation générale : min f(i 1, t(i 2 )) t T I1 et I 2 images à recaler (ou informations extraites de ces images) t : transformation T : ensemble des transformations possibles / admissibles f : critère de dissimilarité (min) ou de similarité (max) Recalage p.3/35
 ou de similarité (max) Recalage")
4 Composantes d un système de recalage nature de la transformation (t et son domaine de définition T ) primitives utilisées (sur quoi portent t et f) critère de similarité f méthode d optimisation non indépendants entre eux non indépendants du type d images, des modalités, et du problème de recalage posé Difficultés liées à la complexité des problèmes à la discrétisation des images à l évaluation de la qualité du recalage Recalage p.4/35

5 Les types de problèmes de recalage 2D/2D, 2D/3D, 3D/3D recalage d images mono-modales recalage d images multi-modales recalage d images multi-temporelles recalage modalité / modèle (ex : carte, atlas) recalage inter-patients... Recalage p.5/35
 recalage")
6 Les transformations admissibles Rigide : uniquement translation et rotation X = RX + T Affine : transforme des lignes parallèles en lignes parallèles X = SRX + T Projective : met en correspondance des lignes non parallèles Déformable : transforme des lignes droites en courbes transformations polynomiales fonctions de base (combinaison) : polynômes, splines... déformations de forme libre déformations élastiques µ 2 u(x, y, z) + (λ + µ) ( u(x, y, z)) + f(x, y, z) = 0 u(x, y, z) : champ de déformation, f : forces externes, λ et µ : constantes d élasticité transformations fluides (u est remplacé par le champ de vélocité) Recalage p.6/35
 + (λ + µ) ( u(x, y, z)) + f(x, y, z) = 0 u(x, y, z) : champ de déformation, f : forces")
7 Modèle global / local modèle global modèle par morceaux (régional) modèle local Recalage p.7/35

8 Rééchantillonnage Transformation directe : t Recalage p.8/35

9 Rééchantillonnage Transformation inverse (mieux) : t 1 Recalage p.8/35

10 Interpolation Plus proche voisin Linéaire y y x x f(x, y)[(1 x)(1 y)] + f(x + 1, y)[ x(1 y)]+ Ordre supérieur f(x, y + 1)[(1 x) y] + f(x + 1, y + 1)[ x y] Recalage p.9/35
![x(1 y)]+ Ordre supérieur f(x, y + 1)[(1 x)](/docs-images/49/18912632/images/page_10.jpg "y] + f(x + 1, y + 1)[ x y] Recalage p.9/35")
11 Les primitives utilisées extrinsèques : cadre stéréotaxique en imagerie médicale marqueurs calibration des systèmes d acquisition intrinsèques : contenu de l image extraites de l image : points de repères (anatomiques, géographiques...) structures ou objets primitives géométriques et différentielles (lignes de crête, etc.) intensités des pixels ou voxels Choix : modalités, influence sur le critère de similarité Recalage p.10/35
 structures ou objets primitives géométriques et différentielles (lignes de crête, etc.")
12 Fonctions de similarité / dissimilarité recherche du point le plus proche minimisation de la distance entre points de repère maximisation de l aire d intersection de surfaces alignement des axes d inertie corrélation entre les deux images (spatial / Fourier) fonction de similarité quadratique minimisation de la variance des rapports d intensité minimisation de la variance dans des partitions de l image de référence projetées sur l image à recaler maximisation de l information mutuelle de l histogramme conjoint minimisation de la dispersion de l histogramme conjoint comptage des changements de signe minimisation de la médiane du carré des erreurs minimisation de mesures fondées sur la matrice de co-occurrence utilisation de la transformée de distances critères bayésiens... Recalage p.11/35

13 Similarité entre points en correspondance Hypothèses : même nombre de points n correspondance entre xi et y i connue dimension quelconque pas de points aberrants (robuste au bruit gaussien) Définition du critère : E = n x i (r(y i ) + t) 2 i=1 Translation optimale : mise en correspondance des centres d inertie des deux ensembles de points Rotation optimale : formule directe en 2D, méthode des quaternions en 3D Recalage p.12/35

14 Représentation des rotations par des quaternions Représentation d une rotation d axe u et d angle θ : (s, v) et ( s, v) avec : s = cos θ 2 v = sin θ 2 u Relation d équivalence : R(q, q ) q = q R 3 est isomorphe à Q 1 /R R 3 est isomorphe à P 3 Rx = q x q Recalage p.13/35

15 Application au recalage rigide Minimisation de E = n i=1 x i (r(y i ) + t) 2 E = = = = n x i q y i q 2 i=1 n x i q y i q 2 q 2 i=1 n x i q q y i q q 2 i=1 n x i q q y i 2 = i=1 i=1 n q t A t i A iq La rotation optimale s obtient en calculant les valeurs propres de la matrice A : A = n A t i A i. i=1 Solution du problème de minimisation aux moindres carrés = quaternion qui est le vecteur propre de norme 1 correspondant à la plus petite valeur propre de A Recalage p.14/35

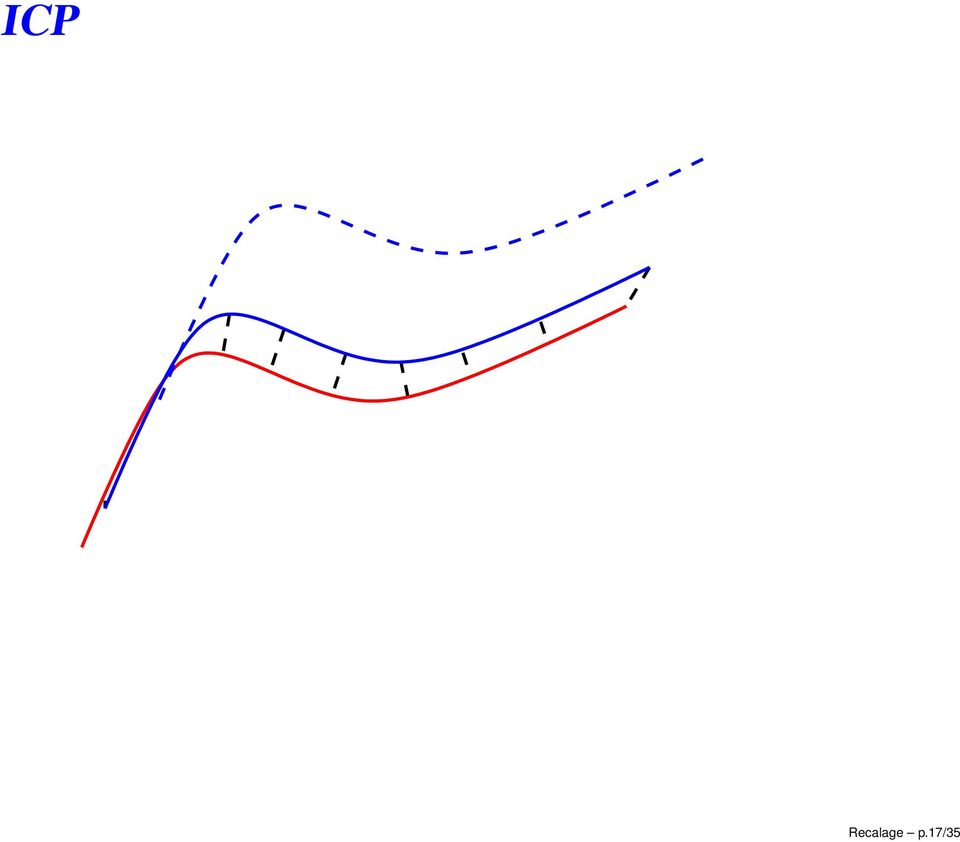
16 Correspondance inconnue Méthode de Fourier en 2D : I 2 = I 1 + t T F 1 [T F (I 2 )T F (I 1 )/ T F (I 2 )T F (I 1 ) ] = δ(x 0, y 0 ) Réduire la complexité : associations progressives entre primitives recalage entre les primitives les plus pertinentes, puis ajout progressif des autres contraintes géométriques, topologiques, etc. mise en correspondance de graphes distance entre surfaces Recalage p.15/35


17 Carte de distances Recalage p.16/35

18 ICP Recalage p.17/35

19 ICP Recalage p.17/35

20 ICP Recalage p.17/35
21 Similarités entre intensités (recalage mono-modal) Quadratique : E(Θ) = x [I ref (x) I rec (T Θ (x))] 2 Quadratique avec normalisation d intentité : E(Θ) = x [ Īrec Ī ref I ref (x) I rec (T Θ (x))] 2 Corrélation : R(Θ) = x [I ref (x) Īref ][I rec (T Θ (x)) Īrec] x [I ref (x) Īref ] 2 x [I rec(t Θ (x)) Īrec] 2 (maximum de corrélation pour la bonne transformation) Similarité robuste : E(Θ) = x ρ[i ref (x) I rec (T Θ (x))] ρ = M-estimateur Recalage p.18/35
22 Exemples d estimateurs robustes Quadratique : Recalage p.19/35
23 Exemples d estimateurs robustes Quadratique tronquée : Recalage p.19/35
24 Exemples d estimateurs robustes Quadratique atténuée (Geman-McLure) : Recalage p.19/35
25 Exemples d estimateurs robustes Quadratique puis linéaire (Huber) : Recalage p.19/35
26 Similarités entre intensités (recalage multi-modal) Uniformité inter-images : partition de l image de référence en régions homogènes et projection (spatiale) sur l image à recaler, puis minimisation de : E(Θ) = regions g N g N σ g (T Θ (x)) µ g (T Θ (x)) σ g (T Θ (x)) = [I rec (T Θ (x)) µ g (T Θ (x))] 2 x,i ref (x)=g µ g (T Θ (x)) = 1 N g x,i ref (x)=g I rec (T Θ (x)) Exploitation de l histogramme conjoint : maximisation de l information mutuelle E(Θ) = g p(g, k) log k p(g, k) p(g)p(k) Similarité robuste : E(Θ) = regions g N g N σ g(t Θ (x)) Recalage p.20/35
27 Information mutuelle NMI H(A) H(B) H(A, B) H(A B) H(B A) Recalage p.21/35
28 Optimisation Algorithmes classiques d optimisation : gradient, gradient conjugué, Powell, simplexe, Levenberg-Marquardt, Newton-Raphson, hashage géométrique Minima locaux importance de l initialisation connaissance de la position du patient en imagerie médicale, des paramètres d acquisition, ou autres informations a priori axes d inertie essais à partir de quelques positions et choix du meilleur résultat Autres solutions pour sortir des minima locaux : diminution progressive du pas, optimisation stochastique, algorithmes génétiques, recuit simulé Méthodes adaptées à la fonction de coût (exemple : ICP) Recherche par graphes, ou programmation dynamique Multi-échelles, multi-résolutions : convergence plus rapide, moins de problèmes de minima locaux Recalage p.22/35
29 Interactivité? Automatique : souvent visé mais pas toujours souhaitable Interactif (assistance par logiciel de visualisation) : lourd, surtout en 3D, peu reproductible Semi-automatique : interaction soit au niveau de l initialisation (d où réduction de l espace de recherche, position initiale proche de la solution donc moins de problèmes de minima locaux), soit au niveau du contrôle Recalage p.23/35
30 Validation et évaluation Accès à la vérité? Critères : précision intrinsèque de l algorithme précision de la mesure, robustesse fiabilité ressources requises complexité algorithmique vérification des hypothèses utilisation en pratique (exemple : contraintes particulières de la routine clinique) Souvent trois niveaux de tests : simulations fantômes données réelles Problèmes des objets de test : idéaux, pas de cas rares ou pathologiques. Exemple d études en recalage d images médicales : Vanderbilt Recalage p.24/35
 Recalage p.")
31 IRM + headshape en EEG/MEG (thèse de Jérémie Pescatore) Recalage p.25/35

32 IRM + headshape en EEG/MEG (thèse de Jérémie Pescatore) fonction de proximité=2.1 mm fonction de proximité=1.80 mm Recalage p.25/35
 Recalage p.")
33 Un exemple de recalage rigide (thèse de Jean-François Mangin) Recalage p.26/35
 Recalage p.")
34 Un exemple de recalage rigide (thèse de Jean-François Mangin) Recalage p.26/35
 Recalage p.")
35 Un exemple de recalage rigide (thèse de Jean-François Mangin) Recalage p.26/35
 Recalage p.")
36 Un exemple de recalage rigide (thèse de Jean-François Mangin) Recalage p.26/35
 Recalage p.")
37 Un exemple de recalage rigide (thèse de Jean-François Mangin) Recalage p.26/35
 Recalage p.")
38 Un exemple de recalage rigide (thèse de Jean-François Mangin) Recalage p.26/35
 Recalage p.")
39 Un exemple de recalage rigide (thèse de Jean-François Mangin) Recalage p.26/35

40 Recalage anatomo-fonctionnel Recalage p.27/35

41 Recalage anatomo-fonctionnel Recalage p.27/35
 Recalage p.")
42 Un exemple de recalage non linéaire (thèse d Oscar Camara) Recalage p.28/35
 Recalage p.")
43 Un exemple de recalage non linéaire (thèse d Oscar Camara) Recalage p.28/35
 Recalage p.")
44 Un exemple de recalage non linéaire (thèse d Oscar Camara) Recalage p.28/35
 Recalage p.")
45 Un exemple de recalage non linéaire (thèse d Oscar Camara) Recalage p.28/35
 Recalage p.")
46 Un exemple de recalage non linéaire (thèse d Oscar Camara) Recalage p.28/35
 Recalage p.")
47 Un exemple de recalage non linéaire (thèse d Oscar Camara) Recalage p.28/35
 Recalage p.")
48 Un exemple de recalage non linéaire (thèse d Oscar Camara) Recalage p.28/35
49 Un exemple de recalage non linéaire (thèse d Oscar Camara) Recalage p.28/35
 Recalage p.")
50 Un exemple de recalage non linéaire (thèse d Oscar Camara) Recalage p.28/35

51 Evaluation : un exemple Recalage p.29/35
 Sans contraintes : Recalage p.")
52 Cas pathologiques (thèse d Antonio Moreno) Sans contraintes : Recalage p.30/35

53 Cas pathologiques (thèse d Antonio Moreno) Avec contraintes sur la tumeur : Recalage p.30/35
 Recalage p.31/35")
54 Recalage avec modèle de respiration (A. Moreno et S. Chambon) Recalage p.31/35

55 Recalage en protonthérapie Recalage p.32/35

56 Recalage en protonthérapie Recalage p.32/35

57 Coupe stéréo Stéréovision Recalage p.33/35

58 Stéréovision Composition colorée Recalage p.33/35

59 Stéréovision Carte de disparités Recalage p.33/35

60 Stéréovision Analyse pyramidale Recalage p.33/35

61 Stéréovision Carte de disparités améliorée Recalage p.33/35
 Recalage p.")
62 Images Reconstruction 3D (projet européen Impact) Recalage p.34/35
 Recalage")
63 Une image Reconstruction 3D (projet européen Impact) Recalage p.34/35
 Carte de disparités Recalage p.")
64 Reconstruction 3D (projet européen Impact) Carte de disparités Recalage p.34/35
 Segmentation en régions Recalage")
65 Reconstruction 3D (projet européen Impact) Segmentation en régions Recalage p.34/35

66 Reconstruction 3D (projet européen Impact) Amélioration de la disparité par interpolation aux moindres carrés Recalage p.34/35

67 Reconstruction 3D (projet européen Impact) Amélioration de la disparité par interpolation robuste Recalage p.34/35

68 Reconstruction 3D (projet européen Impact) Problèmes géométriques... Recalage p.34/35

69 Reconstruction 3D (projet européen Impact) Correction en utilisant des modèles 3D Recalage p.34/35
 Reconstruction 3D Recalage p.")
70 Reconstruction 3D (projet européen Impact) Reconstruction 3D Recalage p.34/35
 Recalage p.")
71 Reconstruction 3D (Amiens) Recalage p.35/35
72 Reconstruction 3D (Amiens) Reconstruction 3D Reconstruction 3D (cathédrale) Recalage p.35/35
Projet : Recalage par maximisation de l information mutuelle
 École Polytechnique de Montréal Automne 25, 12 décembre 25 Projet : Recalage par maximisation de l information mutuelle GBM613, Application médicales de l informatique Nom Matricule Groupe Herve Lombaert
École Polytechnique de Montréal Automne 25, 12 décembre 25 Projet : Recalage par maximisation de l information mutuelle GBM613, Application médicales de l informatique Nom Matricule Groupe Herve Lombaert
Projet de Traitement du Signal Segmentation d images SAR
 Projet de Traitement du Signal Segmentation d images SAR Introduction En analyse d images, la segmentation est une étape essentielle, préliminaire à des traitements de haut niveau tels que la classification,
Projet de Traitement du Signal Segmentation d images SAR Introduction En analyse d images, la segmentation est une étape essentielle, préliminaire à des traitements de haut niveau tels que la classification,
Optimisation non linéaire Irène Charon, Olivier Hudry École nationale supérieure des télécommunications
 Optimisation non linéaire Irène Charon, Olivier Hudry École nationale supérieure des télécommunications A. Optimisation sans contrainte.... Généralités.... Condition nécessaire et condition suffisante
Optimisation non linéaire Irène Charon, Olivier Hudry École nationale supérieure des télécommunications A. Optimisation sans contrainte.... Généralités.... Condition nécessaire et condition suffisante
Développement d un module de recalage d images médicales. Rapport Stage Master 2 Technologie pour la médecine
 Développement d un module de recalage d images médicales Rapport Stage Master 2 Technologie pour la médecine Tuteur de stage : Simone Hemm Jury : Laurent Sarry et Jean Marie Favreau Fachhoschule Nordwestschweiz
Développement d un module de recalage d images médicales Rapport Stage Master 2 Technologie pour la médecine Tuteur de stage : Simone Hemm Jury : Laurent Sarry et Jean Marie Favreau Fachhoschule Nordwestschweiz
R-ICP : une nouvelle approche d appariement 3D orientée régions pour la reconnaissance faciale
 R-ICP : une nouvelle approche d appariement 3D orientée régions pour la reconnaissance faciale Boulbaba BEN AMOR, Karima OUJI, Mohsen ARDABILIAN, et Liming CHEN Laboratoire d InfoRmatique en Images et
R-ICP : une nouvelle approche d appariement 3D orientée régions pour la reconnaissance faciale Boulbaba BEN AMOR, Karima OUJI, Mohsen ARDABILIAN, et Liming CHEN Laboratoire d InfoRmatique en Images et
4.2 Unités d enseignement du M1
 88 CHAPITRE 4. DESCRIPTION DES UNITÉS D ENSEIGNEMENT 4.2 Unités d enseignement du M1 Tous les cours sont de 6 ECTS. Modélisation, optimisation et complexité des algorithmes (code RCP106) Objectif : Présenter
88 CHAPITRE 4. DESCRIPTION DES UNITÉS D ENSEIGNEMENT 4.2 Unités d enseignement du M1 Tous les cours sont de 6 ECTS. Modélisation, optimisation et complexité des algorithmes (code RCP106) Objectif : Présenter
Comparaison de Relevés 3D issus de plusieurs Systèmes de Numérisation
 Laboratoire Vision & Robotique Comparaison de Relevés 3D issus de plusieurs Systèmes de Numérisation Emilie KOENIG, Benjamin ALBOUY, Sylvie TREUILLET, Yves Lucas Contact : Sylvie Treuillet Polytech'Orléans
Laboratoire Vision & Robotique Comparaison de Relevés 3D issus de plusieurs Systèmes de Numérisation Emilie KOENIG, Benjamin ALBOUY, Sylvie TREUILLET, Yves Lucas Contact : Sylvie Treuillet Polytech'Orléans
Fonctions de deux variables. Mai 2011
 Fonctions de deux variables Dédou Mai 2011 D une à deux variables Les fonctions modèlisent de l information dépendant d un paramètre. On a aussi besoin de modéliser de l information dépendant de plusieurs
Fonctions de deux variables Dédou Mai 2011 D une à deux variables Les fonctions modèlisent de l information dépendant d un paramètre. On a aussi besoin de modéliser de l information dépendant de plusieurs
 Utilisation d informations visuelles dynamiques en asservissement visuel Armel Crétual IRISA, projet TEMIS puis VISTA L asservissement visuel géométrique Principe : Réalisation d une tâche robotique par
Utilisation d informations visuelles dynamiques en asservissement visuel Armel Crétual IRISA, projet TEMIS puis VISTA L asservissement visuel géométrique Principe : Réalisation d une tâche robotique par
Analyse de la vidéo. Chapitre 4.1 - La modélisation pour le suivi d objet. 10 mars 2015. Chapitre 4.1 - La modélisation d objet 1 / 57
 Analyse de la vidéo Chapitre 4.1 - La modélisation pour le suivi d objet 10 mars 2015 Chapitre 4.1 - La modélisation d objet 1 / 57 La représentation d objets Plan de la présentation 1 La représentation
Analyse de la vidéo Chapitre 4.1 - La modélisation pour le suivi d objet 10 mars 2015 Chapitre 4.1 - La modélisation d objet 1 / 57 La représentation d objets Plan de la présentation 1 La représentation
Exercices Alternatifs. Quelqu un aurait-il vu passer un polynôme?
 Exercices Alternatifs Quelqu un aurait-il vu passer un polynôme? c 2004 Frédéric Le Roux, François Béguin (copyleft LDL : Licence pour Documents Libres). Sources et figures: polynome-lagrange/. Version
Exercices Alternatifs Quelqu un aurait-il vu passer un polynôme? c 2004 Frédéric Le Roux, François Béguin (copyleft LDL : Licence pour Documents Libres). Sources et figures: polynome-lagrange/. Version
Exercices Alternatifs. Quelqu un aurait-il vu passer un polynôme?
 Exercices Alternatifs Quelqu un aurait-il vu passer un polynôme? c 2004 Frédéric Le Roux, François Béguin (copyleft LDL : Licence pour Documents Libres). Sources et figures: polynome-lagrange/. Version
Exercices Alternatifs Quelqu un aurait-il vu passer un polynôme? c 2004 Frédéric Le Roux, François Béguin (copyleft LDL : Licence pour Documents Libres). Sources et figures: polynome-lagrange/. Version
Continuité et dérivabilité d une fonction
 DERNIÈRE IMPRESSIN LE 7 novembre 014 à 10:3 Continuité et dérivabilité d une fonction Table des matières 1 Continuité d une fonction 1.1 Limite finie en un point.......................... 1. Continuité
DERNIÈRE IMPRESSIN LE 7 novembre 014 à 10:3 Continuité et dérivabilité d une fonction Table des matières 1 Continuité d une fonction 1.1 Limite finie en un point.......................... 1. Continuité
Le patrimoine des ménages retraités : résultats actualisés. Secrétariat général du Conseil d orientation des retraites
 CONSEIL D ORIENTATION DES RETRAITES Séance plénière du 08 juillet 2015 à 9 h 30 «Le patrimoine des retraités et l épargne retraite» Document N 2 bis Document de travail, n engage pas le Conseil Le patrimoine
CONSEIL D ORIENTATION DES RETRAITES Séance plénière du 08 juillet 2015 à 9 h 30 «Le patrimoine des retraités et l épargne retraite» Document N 2 bis Document de travail, n engage pas le Conseil Le patrimoine
Cours3. Applications continues et homéomorphismes. 1 Rappel sur les images réciproques
 Université de Provence Topologie 2 Cours3. Applications continues et homéomorphismes 1 Rappel sur les images réciproques Soit une application f d un ensemble X vers un ensemble Y et soit une partie P de
Université de Provence Topologie 2 Cours3. Applications continues et homéomorphismes 1 Rappel sur les images réciproques Soit une application f d un ensemble X vers un ensemble Y et soit une partie P de
Optimisation et programmation mathématique. Professeur Michel de Mathelin. Cours intégré : 20 h
 Télécom Physique Strasbourg Master IRIV Optimisation et programmation mathématique Professeur Michel de Mathelin Cours intégré : 20 h Programme du cours d optimisation Introduction Chapitre I: Rappels
Télécom Physique Strasbourg Master IRIV Optimisation et programmation mathématique Professeur Michel de Mathelin Cours intégré : 20 h Programme du cours d optimisation Introduction Chapitre I: Rappels
Segmentation d images IRM anatomiques par inférence bayésienne multimodale et détection de lésions
 N d ordre : 5790 THÈSE présentée pour obtenir le grade de Docteur de l Université Louis Pasteur - Strasbourg I École Doctorale Discipline Spécialité : Mathématiques, Sciences de l Information et de l Ingénieur
N d ordre : 5790 THÈSE présentée pour obtenir le grade de Docteur de l Université Louis Pasteur - Strasbourg I École Doctorale Discipline Spécialité : Mathématiques, Sciences de l Information et de l Ingénieur
Foscolo (1), J Felblinger (2), S Bracard (1) CHU Hôpital central, service de neuroradiologie, Nancy (1) CHU BRABOIS, Centre d investigation clinique
, J Felblinger (2), S Bracard (1) CHU Hôpital central, service de neuroradiologie, Nancy (1) CHU BRABOIS, Centre d investigation clinique") S A l (1) G H (2) S S Aptel (1), G Hossu (2), S Foscolo (1), J Felblinger (2), S Bracard (1) CHU Hôpital central, service de neuroradiologie, Nancy (1) CHU BRABOIS, Centre d investigation clinique innovation
S A l (1) G H (2) S S Aptel (1), G Hossu (2), S Foscolo (1), J Felblinger (2), S Bracard (1) CHU Hôpital central, service de neuroradiologie, Nancy (1) CHU BRABOIS, Centre d investigation clinique innovation
Exercices types Algorithmique et simulation numérique Oral Mathématiques et algorithmique Banque PT
 Exercices types Algorithmique et simulation numérique Oral Mathématiques et algorithmique Banque PT Ces exercices portent sur les items 2, 3 et 5 du programme d informatique des classes préparatoires,
Exercices types Algorithmique et simulation numérique Oral Mathématiques et algorithmique Banque PT Ces exercices portent sur les items 2, 3 et 5 du programme d informatique des classes préparatoires,
Quantification Scalaire et Prédictive
 Quantification Scalaire et Prédictive Marco Cagnazzo Département Traitement du Signal et des Images TELECOM ParisTech 7 Décembre 2012 M. Cagnazzo Quantification Scalaire et Prédictive 1/64 Plan Introduction
Quantification Scalaire et Prédictive Marco Cagnazzo Département Traitement du Signal et des Images TELECOM ParisTech 7 Décembre 2012 M. Cagnazzo Quantification Scalaire et Prédictive 1/64 Plan Introduction
Echantillonnage Non uniforme
 Echantillonnage Non uniforme Marie CHABERT IRIT/INP-ENSEEIHT/ ENSEEIHT/TéSASA Patrice MICHEL et Bernard LACAZE TéSA 1 Plan Introduction Echantillonnage uniforme Echantillonnage irrégulier Comparaison Cas
Echantillonnage Non uniforme Marie CHABERT IRIT/INP-ENSEEIHT/ ENSEEIHT/TéSASA Patrice MICHEL et Bernard LACAZE TéSA 1 Plan Introduction Echantillonnage uniforme Echantillonnage irrégulier Comparaison Cas
Analyse stochastique de la CRM à ordre partiel dans le cadre des essais cliniques de phase I
 Analyse stochastique de la CRM à ordre partiel dans le cadre des essais cliniques de phase I Roxane Duroux 1 Cadre de l étude Cette étude s inscrit dans le cadre de recherche de doses pour des essais cliniques
Analyse stochastique de la CRM à ordre partiel dans le cadre des essais cliniques de phase I Roxane Duroux 1 Cadre de l étude Cette étude s inscrit dans le cadre de recherche de doses pour des essais cliniques
Apprendre en pratique - dès le début.
 Apprendre en pratique - dès le début. Les unités de simulation de la gamme KaVo permettent une formation optimale grâce à un agencement flexible des composants de l équipement, une ergonomie excellente
Apprendre en pratique - dès le début. Les unités de simulation de la gamme KaVo permettent une formation optimale grâce à un agencement flexible des composants de l équipement, une ergonomie excellente
Économetrie non paramétrique I. Estimation d une densité
 Économetrie non paramétrique I. Estimation d une densité Stéphane Adjemian Université d Évry Janvier 2004 1 1 Introduction 1.1 Pourquoi estimer une densité? Étudier la distribution des richesses... Proposer
Économetrie non paramétrique I. Estimation d une densité Stéphane Adjemian Université d Évry Janvier 2004 1 1 Introduction 1.1 Pourquoi estimer une densité? Étudier la distribution des richesses... Proposer
= constante et cette constante est a.
 Le problème Lorsqu on sait que f(x 1 ) = y 1 et que f(x 2 ) = y 2, comment trouver l expression de f(x 1 )? On sait qu une fonction affine a une expression de la forme f(x) = ax + b, le problème est donc
Le problème Lorsqu on sait que f(x 1 ) = y 1 et que f(x 2 ) = y 2, comment trouver l expression de f(x 1 )? On sait qu une fonction affine a une expression de la forme f(x) = ax + b, le problème est donc
Dan Istrate. Directeur de thèse : Eric Castelli Co-Directeur : Laurent Besacier
 Détection et reconnaissance des sons pour la surveillance médicale Dan Istrate le 16 décembre 2003 Directeur de thèse : Eric Castelli Co-Directeur : Laurent Besacier Thèse mené dans le cadre d une collaboration
Détection et reconnaissance des sons pour la surveillance médicale Dan Istrate le 16 décembre 2003 Directeur de thèse : Eric Castelli Co-Directeur : Laurent Besacier Thèse mené dans le cadre d une collaboration
En vue de l'obtention du. Présentée et soutenue par Fenohery Tiana ANDRIAMANAMPISOA Le 18 Novembre 2008
 THÈSE En vue de l'obtention du DOCTORAT DE L UNIVERSITÉ DE TOULOUSE Délivré par l'université Toulouse III - Paul Sabatier Spécialité : Informatique Présentée et soutenue par Fenohery Tiana ANDRIAMANAMPISOA
THÈSE En vue de l'obtention du DOCTORAT DE L UNIVERSITÉ DE TOULOUSE Délivré par l'université Toulouse III - Paul Sabatier Spécialité : Informatique Présentée et soutenue par Fenohery Tiana ANDRIAMANAMPISOA
Applications en imagerie cérébrale (MEG/EEG)
") EEG : mesure du potentiel électrique Ordre de grandeur : qq µ-volts Capteurs : électrodes MEG : mesure du champ magnétique Ordre de grandeur : 10 13 Tesla Capteurs SQUID couplés à des bobines VI. Applications
EEG : mesure du potentiel électrique Ordre de grandeur : qq µ-volts Capteurs : électrodes MEG : mesure du champ magnétique Ordre de grandeur : 10 13 Tesla Capteurs SQUID couplés à des bobines VI. Applications
I - PUISSANCE D UN POINT PAR RAPPORT A UN CERCLE CERCLES ORTHOGONAUX POLES ET POLAIRES
 I - PUISSANCE D UN POINT PAR RAPPORT A UN CERCLE CERCLES ORTHOGONAUX POLES ET POLAIRES Théorème - Définition Soit un cercle (O,R) et un point. Une droite passant par coupe le cercle en deux points A et
I - PUISSANCE D UN POINT PAR RAPPORT A UN CERCLE CERCLES ORTHOGONAUX POLES ET POLAIRES Théorème - Définition Soit un cercle (O,R) et un point. Une droite passant par coupe le cercle en deux points A et
Traitement bas-niveau
 Plan Introduction L approche contour (frontière) Introduction Objectifs Les traitements ont pour but d extraire l information utile et pertinente contenue dans l image en regard de l application considérée.
Plan Introduction L approche contour (frontière) Introduction Objectifs Les traitements ont pour but d extraire l information utile et pertinente contenue dans l image en regard de l application considérée.
La Licence Mathématiques et Economie-MASS Université de Sciences Sociales de Toulouse 1
 La Licence Mathématiques et Economie-MASS Université de Sciences Sociales de Toulouse 1 La licence Mathématiques et Economie-MASS de l Université des Sciences Sociales de Toulouse propose sur les trois
La Licence Mathématiques et Economie-MASS Université de Sciences Sociales de Toulouse 1 La licence Mathématiques et Economie-MASS de l Université des Sciences Sociales de Toulouse propose sur les trois
Une comparaison de méthodes de discrimination des masses de véhicules automobiles
 p.1/34 Une comparaison de méthodes de discrimination des masses de véhicules automobiles A. Rakotomamonjy, R. Le Riche et D. Gualandris INSA de Rouen / CNRS 1884 et SMS / PSA Enquêtes en clientèle dans
p.1/34 Une comparaison de méthodes de discrimination des masses de véhicules automobiles A. Rakotomamonjy, R. Le Riche et D. Gualandris INSA de Rouen / CNRS 1884 et SMS / PSA Enquêtes en clientèle dans
Méthodes de quadrature. Polytech Paris-UPMC. - p. 1/48
 Méthodes de Polytech Paris-UPMC - p. 1/48 Polynôme d interpolation de Preuve et polynôme de Calcul de l erreur d interpolation Étude de la formule d erreur Autres méthodes - p. 2/48 Polynôme d interpolation
Méthodes de Polytech Paris-UPMC - p. 1/48 Polynôme d interpolation de Preuve et polynôme de Calcul de l erreur d interpolation Étude de la formule d erreur Autres méthodes - p. 2/48 Polynôme d interpolation
Chp. 4. Minimisation d une fonction d une variable
 Chp. 4. Minimisation d une fonction d une variable Avertissement! Dans tout ce chapître, I désigne un intervalle de IR. 4.1 Fonctions convexes d une variable Définition 9 Une fonction ϕ, partout définie
Chp. 4. Minimisation d une fonction d une variable Avertissement! Dans tout ce chapître, I désigne un intervalle de IR. 4.1 Fonctions convexes d une variable Définition 9 Une fonction ϕ, partout définie
Notes du cours MTH1101 Calcul I Partie II: fonctions de plusieurs variables
 Notes du cours MTH1101 Calcul I Partie II: fonctions de plusieurs variables Guy Desaulniers Département de mathématiques et de génie industriel École Polytechnique de Montréal Automne 2014 Table des matières
Notes du cours MTH1101 Calcul I Partie II: fonctions de plusieurs variables Guy Desaulniers Département de mathématiques et de génie industriel École Polytechnique de Montréal Automne 2014 Table des matières
de calibration Master 2: Calibration de modèles: présentation et simulation d
 Master 2: Calibration de modèles: présentation et simulation de quelques problèmes de calibration Plan de la présentation 1. Présentation de quelques modèles à calibrer 1a. Reconstruction d une courbe
Master 2: Calibration de modèles: présentation et simulation de quelques problèmes de calibration Plan de la présentation 1. Présentation de quelques modèles à calibrer 1a. Reconstruction d une courbe
CAPTEURS - CHAINES DE MESURES
 CAPTEURS - CHAINES DE MESURES Pierre BONNET Pierre Bonnet Master GSI - Capteurs Chaînes de Mesures 1 Plan du Cours Propriétés générales des capteurs Notion de mesure Notion de capteur: principes, classes,
CAPTEURS - CHAINES DE MESURES Pierre BONNET Pierre Bonnet Master GSI - Capteurs Chaînes de Mesures 1 Plan du Cours Propriétés générales des capteurs Notion de mesure Notion de capteur: principes, classes,
MCMC et approximations en champ moyen pour les modèles de Markov
 MCMC et approximations en champ moyen pour les modèles de Markov Gersende FORT LTCI CNRS - TELECOM ParisTech En collaboration avec Florence FORBES (Projet MISTIS, INRIA Rhône-Alpes). Basé sur l article:
MCMC et approximations en champ moyen pour les modèles de Markov Gersende FORT LTCI CNRS - TELECOM ParisTech En collaboration avec Florence FORBES (Projet MISTIS, INRIA Rhône-Alpes). Basé sur l article:
FONCTIONS DE PLUSIEURS VARIABLES (Outils Mathématiques 4)
") FONCTIONS DE PLUSIEURS VARIABLES (Outils Mathématiques 4) Bernard Le Stum Université de Rennes 1 Version du 13 mars 2009 Table des matières 1 Fonctions partielles, courbes de niveau 1 2 Limites et continuité
FONCTIONS DE PLUSIEURS VARIABLES (Outils Mathématiques 4) Bernard Le Stum Université de Rennes 1 Version du 13 mars 2009 Table des matières 1 Fonctions partielles, courbes de niveau 1 2 Limites et continuité
Méthodes de Simulation
 Méthodes de Simulation JEAN-YVES TOURNERET Institut de recherche en informatique de Toulouse (IRIT) ENSEEIHT, Toulouse, France Peyresq06 p. 1/41 Remerciements Christian Robert : pour ses excellents transparents
Méthodes de Simulation JEAN-YVES TOURNERET Institut de recherche en informatique de Toulouse (IRIT) ENSEEIHT, Toulouse, France Peyresq06 p. 1/41 Remerciements Christian Robert : pour ses excellents transparents
Annexe commune aux séries ES, L et S : boîtes et quantiles
 Annexe commune aux séries ES, L et S : boîtes et quantiles Quantiles En statistique, pour toute série numérique de données à valeurs dans un intervalle I, on définit la fonction quantile Q, de [,1] dans
Annexe commune aux séries ES, L et S : boîtes et quantiles Quantiles En statistique, pour toute série numérique de données à valeurs dans un intervalle I, on définit la fonction quantile Q, de [,1] dans
Mathématiques I Section Architecture, EPFL
 Examen, semestre d hiver 2011 2012 Mathématiques I Section Architecture, EPFL Chargé de cours: Gavin Seal Instructions: Mettez votre nom et votre numéro Sciper sur chaque page de l examen. Faites de même
Examen, semestre d hiver 2011 2012 Mathématiques I Section Architecture, EPFL Chargé de cours: Gavin Seal Instructions: Mettez votre nom et votre numéro Sciper sur chaque page de l examen. Faites de même
Fonctions de plusieurs variables, intégrales multiples, et intégrales dépendant d un paramètre
 IUFM du Limousin 2009-10 PLC1 Mathématiques S. Vinatier Rappels de cours Fonctions de plusieurs variables, intégrales multiples, et intégrales dépendant d un paramètre 1 Fonctions de plusieurs variables
IUFM du Limousin 2009-10 PLC1 Mathématiques S. Vinatier Rappels de cours Fonctions de plusieurs variables, intégrales multiples, et intégrales dépendant d un paramètre 1 Fonctions de plusieurs variables
Les atouts et faiblesses des caméras TEP dédiées, TEP corps entier, TEP-CT, TEMP pour la quantification
 Les atouts et faiblesses des caméras TEP dédiées, TEP corps entier, TEP-CT, TEMP pour la quantification Irène Buvat U494 INSERM CHU Pitié-Salpêtrière, Paris [email protected] http://www.guillemet.org/irene
Les atouts et faiblesses des caméras TEP dédiées, TEP corps entier, TEP-CT, TEMP pour la quantification Irène Buvat U494 INSERM CHU Pitié-Salpêtrière, Paris [email protected] http://www.guillemet.org/irene
Programmation linéaire
 1 Programmation linéaire 1. Le problème, un exemple. 2. Le cas b = 0 3. Théorème de dualité 4. L algorithme du simplexe 5. Problèmes équivalents 6. Complexité de l Algorithme 2 Position du problème Soit
1 Programmation linéaire 1. Le problème, un exemple. 2. Le cas b = 0 3. Théorème de dualité 4. L algorithme du simplexe 5. Problèmes équivalents 6. Complexité de l Algorithme 2 Position du problème Soit
Modèles à Événements Discrets. Réseaux de Petri Stochastiques
 Modèles à Événements Discrets Réseaux de Petri Stochastiques Table des matières 1 Chaînes de Markov Définition formelle Idée générale Discrete Time Markov Chains Continuous Time Markov Chains Propriétés
Modèles à Événements Discrets Réseaux de Petri Stochastiques Table des matières 1 Chaînes de Markov Définition formelle Idée générale Discrete Time Markov Chains Continuous Time Markov Chains Propriétés
La classification automatique de données quantitatives
 La classification automatique de données quantitatives 1 Introduction Parmi les méthodes de statistique exploratoire multidimensionnelle, dont l objectif est d extraire d une masse de données des informations
La classification automatique de données quantitatives 1 Introduction Parmi les méthodes de statistique exploratoire multidimensionnelle, dont l objectif est d extraire d une masse de données des informations
CHAPITRE I. Modélisation de processus et estimation des paramètres d un modèle
 CHAPITRE I Modélisation de processus et estimation des paramètres d un modèle I. INTRODUCTION. Dans la première partie de ce chapitre, nous rappelons les notions de processus et de modèle, ainsi que divers
CHAPITRE I Modélisation de processus et estimation des paramètres d un modèle I. INTRODUCTION. Dans la première partie de ce chapitre, nous rappelons les notions de processus et de modèle, ainsi que divers
RO04/TI07 - Optimisation non-linéaire
 RO04/TI07 - Optimisation non-linéaire Stéphane Mottelet Université de Technologie de Compiègne Printemps 2003 I Motivations et notions fondamentales 4 I1 Motivations 5 I2 Formes quadratiques 13 I3 Rappels
RO04/TI07 - Optimisation non-linéaire Stéphane Mottelet Université de Technologie de Compiègne Printemps 2003 I Motivations et notions fondamentales 4 I1 Motivations 5 I2 Formes quadratiques 13 I3 Rappels
Figure 3.1- Lancement du Gambit
 3.1. Introduction Le logiciel Gambit est un mailleur 2D/3D; pré-processeur qui permet de mailler des domaines de géométrie d un problème de CFD (Computational Fluid Dynamics).Il génère des fichiers*.msh
3.1. Introduction Le logiciel Gambit est un mailleur 2D/3D; pré-processeur qui permet de mailler des domaines de géométrie d un problème de CFD (Computational Fluid Dynamics).Il génère des fichiers*.msh
Oscillations libres des systèmes à deux degrés de liberté
 Chapitre 4 Oscillations libres des systèmes à deux degrés de liberté 4.1 Introduction Les systèmes qui nécessitent deux coordonnées indépendantes pour spécifier leurs positions sont appelés systèmes à
Chapitre 4 Oscillations libres des systèmes à deux degrés de liberté 4.1 Introduction Les systèmes qui nécessitent deux coordonnées indépendantes pour spécifier leurs positions sont appelés systèmes à
Simulation d'un examen anthropomorphique en imagerie TEMP à l iode 131 par simulation Monte Carlo GATE
 Simulation d'un examen anthropomorphique en imagerie TEMP à l iode 131 par simulation Monte Carlo GATE LAURENT Rémy [email protected] http://clrpcsv.in2p3.fr Journées des LARD Septembre 2007 M2R
Simulation d'un examen anthropomorphique en imagerie TEMP à l iode 131 par simulation Monte Carlo GATE LAURENT Rémy [email protected] http://clrpcsv.in2p3.fr Journées des LARD Septembre 2007 M2R
Détection et suivi d'objets dans une séquence d'images par contours actifs
 Détection et suivi d'objets dans une séquence d'images par contours actifs A. Fekir (1), N. Benamrane (2) et A. Taleb-Ahmed (3) (1) Département d informatique, Université de Mustapha Stambouli, BP 763,
Détection et suivi d'objets dans une séquence d'images par contours actifs A. Fekir (1), N. Benamrane (2) et A. Taleb-Ahmed (3) (1) Département d informatique, Université de Mustapha Stambouli, BP 763,
Problèmes d ordonnancement dans les systèmes de production. Journée Automatique et Optimisation Université de Paris 12 20 Mars 2003
 Problèmes d ordonnancement dans les systèmes de production Michel Gourgand Université Blaise Pascal Clermont Ferrand LIMOS CNRS UMR 6158 1 Le LIMOS Laboratoire d Informatique, de Modélisation et d Optimisation
Problèmes d ordonnancement dans les systèmes de production Michel Gourgand Université Blaise Pascal Clermont Ferrand LIMOS CNRS UMR 6158 1 Le LIMOS Laboratoire d Informatique, de Modélisation et d Optimisation
Commande Prédictive des. Convertisseurs Statiques
 Commande Prédictive des Convertisseurs Statiques 1 Classification des méthodes de commande pour les convertisseurs statiques Commande des convertisseurs Hystérésis MLI Cde Linéaire Fuzzy Logic Sliding
Commande Prédictive des Convertisseurs Statiques 1 Classification des méthodes de commande pour les convertisseurs statiques Commande des convertisseurs Hystérésis MLI Cde Linéaire Fuzzy Logic Sliding
Développements limités, équivalents et calculs de limites
 Développements ités, équivalents et calculs de ites Eercice. Déterminer le développement ité en 0 à l ordre n des fonctions suivantes :. f() e (+) 3 n. g() sin() +ln(+) n 3 3. h() e sh() n 4. i() sin(
Développements ités, équivalents et calculs de ites Eercice. Déterminer le développement ité en 0 à l ordre n des fonctions suivantes :. f() e (+) 3 n. g() sin() +ln(+) n 3 3. h() e sh() n 4. i() sin(
Introduction au pricing d option en finance
 Introduction au pricing d option en finance Olivier Pironneau Cours d informatique Scientifique 1 Modélisation du prix d un actif financier Les actions, obligations et autres produits financiers cotés
Introduction au pricing d option en finance Olivier Pironneau Cours d informatique Scientifique 1 Modélisation du prix d un actif financier Les actions, obligations et autres produits financiers cotés
Résolution d équations non linéaires
 Analyse Numérique Résolution d équations non linéaires Said EL HAJJI et Touria GHEMIRES Université Mohammed V - Agdal. Faculté des Sciences Département de Mathématiques. Laboratoire de Mathématiques, Informatique
Analyse Numérique Résolution d équations non linéaires Said EL HAJJI et Touria GHEMIRES Université Mohammed V - Agdal. Faculté des Sciences Département de Mathématiques. Laboratoire de Mathématiques, Informatique
LIDAR LAUSANNE 2012. Nouvelles données altimétriques sur l agglomération lausannoise par technologie laser aéroporté et ses produits dérivés
 LIDAR LAUSANNE 2012 Nouvelles données altimétriques sur l agglomération lausannoise par technologie laser aéroporté et ses produits dérivés LIDAR 2012, nouveaux modèles altimétriques 1 Affaire 94022 /
LIDAR LAUSANNE 2012 Nouvelles données altimétriques sur l agglomération lausannoise par technologie laser aéroporté et ses produits dérivés LIDAR 2012, nouveaux modèles altimétriques 1 Affaire 94022 /
Soutenance de stage Laboratoire des Signaux et Systèmes
 Soutenance de stage Laboratoire des Signaux et Systèmes Bornes inférieures bayésiennes de l'erreur quadratique moyenne. Application à la localisation de points de rupture. M2R ATSI Université Paris-Sud
Soutenance de stage Laboratoire des Signaux et Systèmes Bornes inférieures bayésiennes de l'erreur quadratique moyenne. Application à la localisation de points de rupture. M2R ATSI Université Paris-Sud
INTRODUCTION À L ANALYSE FACTORIELLE DES CORRESPONDANCES
 INTRODUCTION À L ANALYSE FACTORIELLE DES CORRESPONDANCES Dominique LAFFLY Maître de Conférences, Université de Pau Laboratoire Société Environnement Territoire UMR 5603 du CNRS et Université de Pau Domaine
INTRODUCTION À L ANALYSE FACTORIELLE DES CORRESPONDANCES Dominique LAFFLY Maître de Conférences, Université de Pau Laboratoire Société Environnement Territoire UMR 5603 du CNRS et Université de Pau Domaine
Image d un intervalle par une fonction continue
 DOCUMENT 27 Image d un intervalle par une fonction continue La continuité d une fonction en un point est une propriété locale : une fonction est continue en un point x 0 si et seulement si sa restriction
DOCUMENT 27 Image d un intervalle par une fonction continue La continuité d une fonction en un point est une propriété locale : une fonction est continue en un point x 0 si et seulement si sa restriction
Introduction à l approche bootstrap
 Introduction à l approche bootstrap Irène Buvat U494 INSERM buvat@imedjussieufr 25 septembre 2000 Introduction à l approche bootstrap - Irène Buvat - 21/9/00-1 Plan du cours Qu est-ce que le bootstrap?
Introduction à l approche bootstrap Irène Buvat U494 INSERM buvat@imedjussieufr 25 septembre 2000 Introduction à l approche bootstrap - Irène Buvat - 21/9/00-1 Plan du cours Qu est-ce que le bootstrap?
TRACER LE GRAPHE D'UNE FONCTION
 TRACER LE GRAPHE D'UNE FONCTION Sommaire 1. Méthodologie : comment tracer le graphe d'une fonction... 1 En combinant les concepts de dérivée première et seconde, il est maintenant possible de tracer le
TRACER LE GRAPHE D'UNE FONCTION Sommaire 1. Méthodologie : comment tracer le graphe d'une fonction... 1 En combinant les concepts de dérivée première et seconde, il est maintenant possible de tracer le
Jean-Marc Schaffner Ateliers SCHAFFNER. Laure Delaporte ConstruirAcier. Jérémy Trouart Union des Métalliers
 Jean-Marc Schaffner Ateliers SCHAFFNER Laure Delaporte ConstruirAcier Jérémy Trouart Union des Métalliers Jean-Marc SCHAFFNER des Ateliers SCHAFFNER chef de file du GT4 Jérémy TROUART de l Union des Métalliers
Jean-Marc Schaffner Ateliers SCHAFFNER Laure Delaporte ConstruirAcier Jérémy Trouart Union des Métalliers Jean-Marc SCHAFFNER des Ateliers SCHAFFNER chef de file du GT4 Jérémy TROUART de l Union des Métalliers
Algorithmes pour la planification de mouvements en robotique non-holonome
 Algorithmes pour la planification de mouvements en robotique non-holonome Frédéric Jean Unité de Mathématiques Appliquées ENSTA Le 02 février 2006 Outline 1 2 3 Modélisation Géométrique d un Robot Robot
Algorithmes pour la planification de mouvements en robotique non-holonome Frédéric Jean Unité de Mathématiques Appliquées ENSTA Le 02 février 2006 Outline 1 2 3 Modélisation Géométrique d un Robot Robot
Dimensionnement Introduction
 Dimensionnement Introduction Anthony Busson Dimensionnement Pourquoi dimensionner? Création d un système informatique ou réseau Problème de décision (taille des différents paramètres) Evaluer les performances
Dimensionnement Introduction Anthony Busson Dimensionnement Pourquoi dimensionner? Création d un système informatique ou réseau Problème de décision (taille des différents paramètres) Evaluer les performances
Cours d Analyse. Fonctions de plusieurs variables
 Cours d Analyse Fonctions de plusieurs variables Licence 1ère année 2007/2008 Nicolas Prioux Université de Marne-la-Vallée Table des matières 1 Notions de géométrie dans l espace et fonctions à deux variables........
Cours d Analyse Fonctions de plusieurs variables Licence 1ère année 2007/2008 Nicolas Prioux Université de Marne-la-Vallée Table des matières 1 Notions de géométrie dans l espace et fonctions à deux variables........
TD1 Signaux, énergie et puissance, signaux aléatoires
 TD1 Signaux, énergie et puissance, signaux aléatoires I ) Ecrire l'expression analytique des signaux représentés sur les figures suivantes à l'aide de signaux particuliers. Dans le cas du signal y(t) trouver
TD1 Signaux, énergie et puissance, signaux aléatoires I ) Ecrire l'expression analytique des signaux représentés sur les figures suivantes à l'aide de signaux particuliers. Dans le cas du signal y(t) trouver
Ordonnancement robuste et décision dans l'incertain
 Ordonnancement robuste et décision dans l'incertain 4 ème Conférence Annuelle d Ingénierie Système «Efficacité des entreprises et satisfaction des clients» Centre de Congrès Pierre Baudis,TOULOUSE, 2-4
Ordonnancement robuste et décision dans l'incertain 4 ème Conférence Annuelle d Ingénierie Système «Efficacité des entreprises et satisfaction des clients» Centre de Congrès Pierre Baudis,TOULOUSE, 2-4
PROBLEMES D'ORDONNANCEMENT AVEC RESSOURCES
 Leçon 11 PROBLEMES D'ORDONNANCEMENT AVEC RESSOURCES Dans cette leçon, nous retrouvons le problème d ordonnancement déjà vu mais en ajoutant la prise en compte de contraintes portant sur les ressources.
Leçon 11 PROBLEMES D'ORDONNANCEMENT AVEC RESSOURCES Dans cette leçon, nous retrouvons le problème d ordonnancement déjà vu mais en ajoutant la prise en compte de contraintes portant sur les ressources.
3 Approximation de solutions d équations
 3 Approximation de solutions d équations Une équation scalaire a la forme générale f(x) =0où f est une fonction de IR dans IR. Un système de n équations à n inconnues peut aussi se mettre sous une telle
3 Approximation de solutions d équations Une équation scalaire a la forme générale f(x) =0où f est une fonction de IR dans IR. Un système de n équations à n inconnues peut aussi se mettre sous une telle
LA NOTATION STATISTIQUE DES EMPRUNTEURS OU «SCORING»
 LA NOTATION STATISTIQUE DES EMPRUNTEURS OU «SCORING» Gilbert Saporta Professeur de Statistique Appliquée Conservatoire National des Arts et Métiers Dans leur quasi totalité, les banques et organismes financiers
LA NOTATION STATISTIQUE DES EMPRUNTEURS OU «SCORING» Gilbert Saporta Professeur de Statistique Appliquée Conservatoire National des Arts et Métiers Dans leur quasi totalité, les banques et organismes financiers
L ANALYSE EN COMPOSANTES PRINCIPALES (A.C.P.) Pierre-Louis GONZALEZ
 Pierre-Louis GONZALEZ") L ANALYSE EN COMPOSANTES PRINCIPALES (A.C.P.) Pierre-Louis GONZALEZ INTRODUCTION Données : n individus observés sur p variables quantitatives. L A.C.P. permet d eplorer les liaisons entre variables et
L ANALYSE EN COMPOSANTES PRINCIPALES (A.C.P.) Pierre-Louis GONZALEZ INTRODUCTION Données : n individus observés sur p variables quantitatives. L A.C.P. permet d eplorer les liaisons entre variables et
PROJET MODELE DE TAUX
 MASTER 272 INGENIERIE ECONOMIQUE ET FINANCIERE PROJET MODELE DE TAUX Pricing du taux d intérêt des caplets avec le modèle de taux G2++ Professeur : Christophe LUNVEN 29 Fevrier 2012 Taylan KUNAL - Dinh
MASTER 272 INGENIERIE ECONOMIQUE ET FINANCIERE PROJET MODELE DE TAUX Pricing du taux d intérêt des caplets avec le modèle de taux G2++ Professeur : Christophe LUNVEN 29 Fevrier 2012 Taylan KUNAL - Dinh
Compte-rendu Réunion générale. Grenoble, le 29 juin 2011 URBASIS
 URBASIS Sismologie urbaine : évaluation de la vulnérabilité et des dommages sismiques par méthodes innovantes ANR09RISK009 URBASIS Compterendu Réunion générale Grenoble, le 29 juin 2011 Participants: J.
URBASIS Sismologie urbaine : évaluation de la vulnérabilité et des dommages sismiques par méthodes innovantes ANR09RISK009 URBASIS Compterendu Réunion générale Grenoble, le 29 juin 2011 Participants: J.
Continuité d une fonction de plusieurs variables
 Chapitre 2 Continuité d une fonction de plusieurs variables Maintenant qu on a défini la notion de limite pour des suites dans R n, la notion de continuité s étend sans problème à des fonctions de plusieurs
Chapitre 2 Continuité d une fonction de plusieurs variables Maintenant qu on a défini la notion de limite pour des suites dans R n, la notion de continuité s étend sans problème à des fonctions de plusieurs
Chapitre 7 : Intégration sur un intervalle quelconque
 Universités Paris 6 et Paris 7 M1 MEEF Analyse (UE 3) 2013-2014 Chapitre 7 : Intégration sur un intervalle quelconque 1 Fonctions intégrables Définition 1 Soit I R un intervalle et soit f : I R + une fonction
Universités Paris 6 et Paris 7 M1 MEEF Analyse (UE 3) 2013-2014 Chapitre 7 : Intégration sur un intervalle quelconque 1 Fonctions intégrables Définition 1 Soit I R un intervalle et soit f : I R + une fonction
STATIQUE GRAPHIQUE ET STATIQUE ANALYTIQUE
 ÉCOLE D'INGÉNIEURS DE FRIBOURG (E.I.F.) SECTION DE MÉCANIQUE G.R. Nicolet, revu en 2006 STATIQUE GRAPHIQUE ET STATIQUE ANALYTIQUE Eléments de calcul vectoriel Opérations avec les forces Equilibre du point
ÉCOLE D'INGÉNIEURS DE FRIBOURG (E.I.F.) SECTION DE MÉCANIQUE G.R. Nicolet, revu en 2006 STATIQUE GRAPHIQUE ET STATIQUE ANALYTIQUE Eléments de calcul vectoriel Opérations avec les forces Equilibre du point
PLATE-FORME COMMUNE UNE SOLUTION LOGICIELLE UNIQUE POUR AMÉLIORER LA PRODUCTIVITÉ. Logiciel DIRECTVIEW V5 pour CR et DR
 Logiciel DIRECTVIEW V5 pour CR et DR UNE SOLUTION LOGICIELLE UNIQUE POUR AMÉLIORER LA PRODUCTIVITÉ Vous pouvez faire confiance aux systèmes CR et DR de Carestream pour leur qualité de prise d images. Maintenant
Logiciel DIRECTVIEW V5 pour CR et DR UNE SOLUTION LOGICIELLE UNIQUE POUR AMÉLIORER LA PRODUCTIVITÉ Vous pouvez faire confiance aux systèmes CR et DR de Carestream pour leur qualité de prise d images. Maintenant
OPTIMISATION À UNE VARIABLE
 OPTIMISATION À UNE VARIABLE Sommaire 1. Optimum locaux d'une fonction... 1 1.1. Maximum local... 1 1.2. Minimum local... 1 1.3. Points stationnaires et points critiques... 2 1.4. Recherche d'un optimum
OPTIMISATION À UNE VARIABLE Sommaire 1. Optimum locaux d'une fonction... 1 1.1. Maximum local... 1 1.2. Minimum local... 1 1.3. Points stationnaires et points critiques... 2 1.4. Recherche d'un optimum
L apport du HPC pour l optimisation. Eric Jacquet-Lagrèze. FORUM TERATEC 28 juin 2011
 L apport du HPC pour l optimisation Eric Jacquet-Lagrèze FORUM TERATEC 28 juin 2011 Sommaire 1 / Recherche Opérationnelle et calcul scientifique 2 / Où se trouve la complexité et quels enjeux pour le HPC?
L apport du HPC pour l optimisation Eric Jacquet-Lagrèze FORUM TERATEC 28 juin 2011 Sommaire 1 / Recherche Opérationnelle et calcul scientifique 2 / Où se trouve la complexité et quels enjeux pour le HPC?
Annexe 6. Notions d ordonnancement.
 Annexe 6. Notions d ordonnancement. APP3 Optimisation Combinatoire: problèmes sur-contraints et ordonnancement. Mines-Nantes, option GIPAD, 2011-2012. [email protected] Résumé Ce document
Annexe 6. Notions d ordonnancement. APP3 Optimisation Combinatoire: problèmes sur-contraints et ordonnancement. Mines-Nantes, option GIPAD, 2011-2012. [email protected] Résumé Ce document
Un choc pour une vie!
 www.cardiouest.fr Un choc pour une vie! Spécialiste Défibrillateurs Formations 1ers Secours 6, rue Eugène Quessot 35000 RENNES Tél : 02 30 96 19 53 Mail : [email protected] CardiAid est conçu pour rendre
www.cardiouest.fr Un choc pour une vie! Spécialiste Défibrillateurs Formations 1ers Secours 6, rue Eugène Quessot 35000 RENNES Tél : 02 30 96 19 53 Mail : [email protected] CardiAid est conçu pour rendre
Équations non linéaires
 Équations non linéaires Objectif : trouver les zéros de fonctions (ou systèmes) non linéaires, c-à-d les valeurs α R telles que f(α) = 0. y f(x) α 1 α 2 α 3 x Equations non lineaires p. 1/49 Exemples et
Équations non linéaires Objectif : trouver les zéros de fonctions (ou systèmes) non linéaires, c-à-d les valeurs α R telles que f(α) = 0. y f(x) α 1 α 2 α 3 x Equations non lineaires p. 1/49 Exemples et
Cloud computing et sécurité
 Cloud computing et sécurité Comparaison de systèmes chiffrés Rokhaya CISSE 1 1 2A ISI Grenoble INP -Ensimag 19 Mai 2015 Rokhaya CISSE Grenoble INP-Ensimag Comparaison de systèmes chiffrés 19 Mai 2015 1
Cloud computing et sécurité Comparaison de systèmes chiffrés Rokhaya CISSE 1 1 2A ISI Grenoble INP -Ensimag 19 Mai 2015 Rokhaya CISSE Grenoble INP-Ensimag Comparaison de systèmes chiffrés 19 Mai 2015 1
Chapitre 11. Séries de Fourier. Nous supposons connues les formules donnant les coefficients de Fourier d une fonction 2 - périodique :
 Chapitre Chapitre. Séries de Fourier Nous supposons connues les formules donnant les coefficients de Fourier d une fonction - périodique : c c a0 f x dx c an f xcosnxdx c c bn f xsinn x dx c L objet de
Chapitre Chapitre. Séries de Fourier Nous supposons connues les formules donnant les coefficients de Fourier d une fonction - périodique : c c a0 f x dx c an f xcosnxdx c c bn f xsinn x dx c L objet de
* très facile ** facile *** difficulté moyenne **** difficile ***** très difficile I : Incontournable
 Eo7 Fonctions de plusieurs variables Eercices de Jean-Louis Rouget Retrouver aussi cette fiche sur wwwmaths-francefr * très facile ** facile *** difficulté moenne **** difficile ***** très difficile I
Eo7 Fonctions de plusieurs variables Eercices de Jean-Louis Rouget Retrouver aussi cette fiche sur wwwmaths-francefr * très facile ** facile *** difficulté moenne **** difficile ***** très difficile I
Programmation linéaire
 Programmation linéaire DIDIER MAQUIN Ecole Nationale Supérieure d Electricité et de Mécanique Institut National Polytechnique de Lorraine Mathématiques discrètes cours de 2ème année Programmation linéaire
Programmation linéaire DIDIER MAQUIN Ecole Nationale Supérieure d Electricité et de Mécanique Institut National Polytechnique de Lorraine Mathématiques discrètes cours de 2ème année Programmation linéaire
Catalogue de formation
 Enregistré sous le numéro : 11 91 012 9991 auprès du Commissaire de la République de la Région Ile de France et du Département de Paris, CADLM propose un ensemble de formation dont les programmes sont
Enregistré sous le numéro : 11 91 012 9991 auprès du Commissaire de la République de la Région Ile de France et du Département de Paris, CADLM propose un ensemble de formation dont les programmes sont
Programme scientifique Majeure INTELLIGENCE NUMERIQUE. Mentions Image et Réalité Virtuelle Intelligence Artificielle et Robotique
 É C O L E D I N G É N I E U R D E S T E C H N O L O G I E S D E L I N F O R M A T I O N E T D E L A C O M M U N I C A T I O N Programme scientifique Majeure INTELLIGENCE NUMERIQUE Langage Java Mentions
É C O L E D I N G É N I E U R D E S T E C H N O L O G I E S D E L I N F O R M A T I O N E T D E L A C O M M U N I C A T I O N Programme scientifique Majeure INTELLIGENCE NUMERIQUE Langage Java Mentions
Baccalauréat ES Pondichéry 7 avril 2014 Corrigé
 Baccalauréat ES Pondichéry 7 avril 204 Corrigé EXERCICE 4 points Commun à tous les candidats. Proposition fausse. La tangente T, passant par les points A et B d abscisses distinctes, a pour coefficient
Baccalauréat ES Pondichéry 7 avril 204 Corrigé EXERCICE 4 points Commun à tous les candidats. Proposition fausse. La tangente T, passant par les points A et B d abscisses distinctes, a pour coefficient
Sujet 1 : Diagnostique du Syndrome de l apnée du sommeil par des techniques d analyse discriminante.
 Sujet 1 : Diagnostique du Syndrome de l apnée du sommeil par des techniques d analyse discriminante. Objectifs et formulation du sujet Le syndrome de l apnée du sommeil (SAS) est un problème de santé publique
Sujet 1 : Diagnostique du Syndrome de l apnée du sommeil par des techniques d analyse discriminante. Objectifs et formulation du sujet Le syndrome de l apnée du sommeil (SAS) est un problème de santé publique
Examen optimisation Centrale Marseille (2008) et SupGalilee (2008)
 et SupGalilee (2008)") Examen optimisation Centrale Marseille (28) et SupGalilee (28) Olivier Latte, Jean-Michel Innocent, Isabelle Terrasse, Emmanuel Audusse, Francois Cuvelier duree 4 h Tout resultat enonce dans le texte peut
Examen optimisation Centrale Marseille (28) et SupGalilee (28) Olivier Latte, Jean-Michel Innocent, Isabelle Terrasse, Emmanuel Audusse, Francois Cuvelier duree 4 h Tout resultat enonce dans le texte peut
FAG Detector II le collecteur et l analyseur de données portatif. Information Technique Produit
 FAG II le collecteur et l analyseur de données portatif Information Technique Produit Application La maintenance conditionnelle Principe de fonctionnement Application Le FAG II est, à la fois, un appareil
FAG II le collecteur et l analyseur de données portatif Information Technique Produit Application La maintenance conditionnelle Principe de fonctionnement Application Le FAG II est, à la fois, un appareil
MODULE D EXERCICE PROFESSIONNEL NOTION MÉDICO-ÉCONOMIQUE DES DE RADIOLOGIE ET IMAGERIE MÉDICALE. Dr F Lefèvre (1-2), Pr M Claudon (2)
, Pr M Claudon (2)") MODULE D EXERCICE PROFESSIONNEL NOTION MÉDICO-ÉCONOMIQUE DES DE RADIOLOGIE ET IMAGERIE MÉDICALE Dr F Lefèvre (1-2), Pr M Claudon (2) 1 - SCP Radiolor 2 - CHU de Nancy MODE D EXERCICE DU PRATICIEN Choix
MODULE D EXERCICE PROFESSIONNEL NOTION MÉDICO-ÉCONOMIQUE DES DE RADIOLOGIE ET IMAGERIE MÉDICALE Dr F Lefèvre (1-2), Pr M Claudon (2) 1 - SCP Radiolor 2 - CHU de Nancy MODE D EXERCICE DU PRATICIEN Choix
Systèmes de transmission
 Systèmes de transmission Conception d une transmission série FABRE Maxime 2012 Introduction La transmission de données désigne le transport de quelque sorte d'information que ce soit, d'un endroit à un
Systèmes de transmission Conception d une transmission série FABRE Maxime 2012 Introduction La transmission de données désigne le transport de quelque sorte d'information que ce soit, d'un endroit à un
Calcul différentiel sur R n Première partie
 Calcul différentiel sur R n Première partie Université De Metz 2006-2007 1 Définitions générales On note L(R n, R m ) l espace vectoriel des applications linéaires de R n dans R m. Définition 1.1 (différentiabilité
Calcul différentiel sur R n Première partie Université De Metz 2006-2007 1 Définitions générales On note L(R n, R m ) l espace vectoriel des applications linéaires de R n dans R m. Définition 1.1 (différentiabilité
Planche n o 22. Fonctions de plusieurs variables. Corrigé
 Planche n o Fonctions de plusieurs variables Corrigé n o : f est définie sur R \ {, } Pour, f, = Quand tend vers, le couple, tend vers le couple, et f, tend vers Donc, si f a une limite réelle en, cette
Planche n o Fonctions de plusieurs variables Corrigé n o : f est définie sur R \ {, } Pour, f, = Quand tend vers, le couple, tend vers le couple, et f, tend vers Donc, si f a une limite réelle en, cette
I Stabilité, Commandabilité et Observabilité 11. 1 Introduction 13 1.1 Un exemple emprunté à la robotique... 13 1.2 Le plan... 18 1.3 Problème...
 TABLE DES MATIÈRES 5 Table des matières I Stabilité, Commandabilité et Observabilité 11 1 Introduction 13 1.1 Un exemple emprunté à la robotique................... 13 1.2 Le plan...................................
TABLE DES MATIÈRES 5 Table des matières I Stabilité, Commandabilité et Observabilité 11 1 Introduction 13 1.1 Un exemple emprunté à la robotique................... 13 1.2 Le plan...................................