Implémentation de Nouveaux Elements Finis dans Life et Applications
|
|
|
- Yvette Samson
- il y a 10 ans
- Total affichages :
Transcription
1 1

2 Département Informatique et Mathématiques Appliquées Année Universitaire Rapport de stage Implémentation de Nouveaux Elements Finis dans Life et Applications Présenté par Abdoulaye Samake M1 Mathématiques Appliquées et industrielles Parcours Mathématiques et Informatique Tuteur M. Christophe Prud'homme

3 Sommaire.1 Elements nis de Raviart-Thomas.1.1 Elements nis de Raviart-Thomas d'ordre.1.2 Elements nis de Raviart-Thomas d'ordre k 1.2.1_ Construction de RT k 1.2.2_ Autre formulation de la construction de RT k.2 Applications.2.1 Application de l'élement ni de Raviart-Thomas-Nedelec au problème de Stokes.2.2 Construction des élements nis de Raviart-Thomas-Nedelec.2.3 Dénition des degrées de liberté.3 Méthode des élements nis spectraux 1

4 1_ Elements nis de Raviart-thomas 1.1_ Elements Finis de Raviart-thomas d'ordre :RT soit ˆK un simplexe unitaire de R d. On considère l'espace polynomial de dimension d + 1 par : ˆP = P d xp avec x = (x 1, x 2,... x d ). On choisit les degrés de liberté sur ˆP,la valeur moyenne de la composante normale sur chacun des 3 cotés (respectivement des 4 faces) de ˆK en dimension 2 (respectivement 3). Soit ˆΣ l'ensemble des degrés de liberté ainsi dénis. On verie aisement que le triplet ( ˆK, ˆP, ˆΣ) est un élement ni. Il porte le nom d'élement ni de Raviart-thomas et souvent noté RT. Il intervient par exemple dans des applications liées à la mécanique des uides où les fonctions à interpoler sont des vitesses dont on souhaite contrôler le ux normal aux interfaces entres des mailles. En dimension 2 on a : ˆP = {(α 1 + α 3 x 1, α 2 + α 3 x 2 ), (α 1, α 2, α 3 ) R 3 } En dimension 3 on a : ˆP = {(α 1 + α 4 x 1, α 2 + α 4 x 2, α 3 + α 4 x 3 ), (α 1, α 2, α 3, α 4 ) R 4 } Nous observons dans les gures ci-dessous les degrés de libertés associés à RT en dimension 2 à gauche et en dimension 3 à droite. 2
 est un élement ni. Il porte le nom d'élement ni de Raviart-thomas et souvent noté RT.")
5 3

6 1.2_ Elements Finis de Raviart-thomas d'ordre k :RT k La théorie des élements nis a été beaucoup étudié et l'element de poids faible (Crouziex Raviart) est très pratique dans de nombreuses situations. Les élement nis non conformes sont étroitement liées à des méthodes dite hybride primal de Raviart-Thomas. Raviart et Thomas dénirent toute une famille des espaces de fonctions,mais les membres de l'ordre sont encore beaucoup plus compliqués par la présence d'une fonction supplémentaire au délà de P k. Pour l'espace des fonctions d'ordre n,cette fonction supplémentaire est : (λ 1 λ )(λ 2 λ 1 )(λ λ 2 )(λ λ 1 ) n 2 2 (λ 1 λ 2 ) n 2 2 (λ 2 λ ) n 2 2 avec des opérateurs surchargés. Nous pouvons creer des objets simples pour les cordonnées barycentriques,ajouter des méthodes pour faire la diérentiation. Ensuite on forme un espace de fonctions orthonormaliseés en projettant ces fonctions et une base de Dubiner d'ordre k sur P k+1. Les dégrés de liberté pour k = 2 sont : L'evaluation ponctuelle aux deux points de Gauss-Legendre sur chaque arête du triangle ; L'evaluation ponctuelle au centre. Bien que l'espace fonctionnel est bien déni pour tous les ordres,les degrés de liberté appropriés pour le cas general des espaces plus élevés n'ont pas été denis. Pour ceratins degré (tel que 6),le barycentre est déjà dans le jeux naturel de l'interieur. Sur les triangles il ya 3 élements bien connus pour la discretisation H(div). Elles sont dûes à Raviart et Thomas. Les 3 familles sont dénies et étudiées pour tous les ordres avec des propriétés d'approximations optimales. Pourtant,presque tous les calculs utilisent le plus bas espace RT en ordre,même quand les ordres superieurs d'approximations seraient appropriés. Cela est dû à une grande partie à la diculté percue à la compilation des elements _ Construction de RT k La famille d'élement ni de Raviart-Thomas utilise les espaces de fonctions denis par : RT k (T ) = P k (T, R i ) i=2,3 + xp k \ P k 1 _ En dimension 2 T designe un triangle alors qu'en dimension 3 T designe un tétraèdre selon que i soit 2 ou 3. Autrement dit les espaces sont des vecteurs de polynômes de degré k ainsi que le produit de la postion par le polynoôme scalaire de degré k. Ce espace est le plus petit espace V pour les cartes de divergence sur P k. 4
(λ 2 λ 1 )(λ λ 2 )(λ λ 1 ) n 2 2 (λ 1 λ 2 ) n 2 2 (λ 2 λ ) n 2 2 avec des opérateurs surchargés.")
7 Si D k indique la liste des polynômes Dubiner de degré k où moins, D k D k 1 est l'ensemble des k + 1 polynômes de Dubiner qui sont exactement de degré k. Une base non orthonormée de choix pour RT k est alors : {(p, )} p Dk {(, p)}p Dk {(xp, yp)}p (Dk D k 1 ) Nous pouvons numeriquement projetter ses fonctions sur une base de P k+1 (T, R 2 ) et orthonormalisée. Cela donne une base privilegée,il est donc necessaire de decrire les noeuds. Ceux sont : Les Composantes à la normale à k + 1 points sur chaque sur chaque arête ; Les moments contre une base de P k 1 (T, R 2 ). Nous choisissons les points de bord à équidistance à l'interieur de chaque bord et utiliser les vecteurs composés d'un polynome de Dubiner dans une composante et dans l'autre comme base pour les noeuds de l'interieur 1.2.2_ Autre formulation de la construction de RT k Les espaces de polynomes utiles à la construction de l'élement ni de Raviart- Thomas sont : _ P k espace de polynomes de degré k ; _ P k espace des polynomes homogenes de degré k ; _ RT k = (P k ) d xp k \ P k 1 où x est un point de R d. P k \ P k 1 designe le complementaire de P k 1 dans P k. Pour simplier les notations,posons tout simplement H k = xp k \ P k 1 H k est un espace très particulier dont les elements sont vecteurs de polynômes homogènes de degré k + 1. On note également que H k est de même dimension que P k+1. Propriétés : dim P k = Cn+k k = (n+k)! n!k! dim (P k ) n = ncn+k k = (n+k)! (n 1)!k! (n+k 2)! (n 1)!(k 1)! dim P k = C n 1 n+k 2 = Donc dim H k = (n+k 1)! (n 1)!k! dim RT k = dim (P k ) n + dim H k. 1_ Construction en dimension 2 Dénition : soit (K, P, Σ) déni par : _ K triangle (3 arêtes a i de tangente τ i et de normale n i ) 5
.")
8 _ P = RT k = (P k ) 2 H k _ Σ = Σ 1 k Σ2 k avec _ Σ 1 k : L'ensemble des fonctions ˆv telles que la restriction sur une maille soit dans P k ; _ Σ 2 k : L'ensemble des fonctions ω telles que la restriction sur une maille soit dans H k et ω. n soient continues au niveau des interfaces entre maille. Pour la determination des fonctions de base,nous allons nous interesser au triangle de réference. Les fonctions de réference ˆv sont développées sur une base de (k+1)(k+2) fonctions : 2 { ˆv (ix,iy)/i x + i y k} dont on choisit pour dégrés de liberté une base de P k 1. ˆv (ix,iy) est déni comme le produit des polynômes de lagrange aux points de gauss : ˆv (ix,iy)(x, y) = l ix (x).l iy (y) _ pour denir les fonctions vectorielles,on dénit les polynômes {p i / i [[, k+1]]} sur [-1,1] à partir des polynômes de Lagrange associés aux points de Gauss d'ordre k par : p (x) = 1 1 x l (t)dt w 1 p i (x) = 1 1 x l i 1 (t)dt (1) w i 1 1 p k+1 (x) = 1 1 x l k (t)dt w k avec {w i }les points de Gauss d'ordre k _ w sont dénies sur une base de k + 1 fonctions ( ) { w w i x x x,i y = ix,iy /i x [[, k + 1]], i y [[, k]] et i x + i y k + 1 } ( ) { w y i x,i y = w y /i y [[, k + 1]], i x [[1, k]] et i x + i y k + 1 } i x,i y 1 avec _ w x i x,i y (x, y) = p ix (x)l iy (y) _ w y i x,i y,i z (x, y, z) = l ix (x)p iy (y) On rémarque que p i ( 1) = δ i, et p i (1) = δ i,k+1 Ce qui permet d'assurer la continuité aux interfaces en plaçant les degrés de liberté associés aux fonctions w x 1,i y sur l'interface gauche de ˆK et sur l'interface droite ceux associés à w x 1,i y 1_ Construction en dimension 3 Denition : soit (K, P, Σ) deni par : 6
(k+2) fonctions : 2 { ˆv (ix,iy)/i x + i y k} dont on choisit pour dégrés de liberté une base de P k 1.")
9 _ K tétraèdre (6 arêtes a i de tangente τ i 4 faces f i de normale n i ) _ P = RT k = (P k ) 2 H k _ Σ = Σ 1 k Σ2 k avec _ Σ 1 k : L'ensemble des fonctions ˆv telles que la restriction sur une maille soit dans P k ; _ Σ 2 k : L'ensemble des fonctions ω telles que la restriction sur une maille soit dans H k et ω. n soient continues au niveau des interfaces entre maille. Pour la determination des fonctions de base,nous allons nous interesser au tétraèdre de réference. Les fonctions de réference ˆv sont developpées sur une base de (k+1)(k+2)(k+3) fonctions : 6 { ˆv (ix,iy,i z)/i x + i y + i z k} dont on choisit pour dégrés de liberté une base de P k 1. ˆv (ix,iy,i z) est déni comme le produit des polynômes de lagrange aux points de gauss : ˆv (ix,iy,i z)(x, y, z) = l ix (x)l iy (y)l iz (z) _ pour dénir les fonctions vectorielles,on denit les polynômes {p i / i [[, k+1]]} sur [-1,1] à partir des polynômes de Lagrange associés aux points de Gauss d'ordre k par : p (x) = 1 1 x l (t)dt w 1 p i (x) = 1 1 x l i 1 (t)dt (2) w i 1 1 p k+1 (x) = 1 1 x l k (t)dt w k avec {w i }les points de Gauss d'ordre k _ w sont dénies sur une base de (k+1)(k+2) fonctions 2 w { w i x i x x,i y,i z x,i y,i z = /i x [[1, k + 1]], (i x, i y ) [[, k]] 2 et i x + i y + i z k + 1 } { w y i x,i y,i z = w y i x,i y /i y [[, k + 1]], (i x, i z ) [[, k]] 2 et i x + i y + i z 1 k + 1 } { w y i x,i y,i z = /i z [[, k + 1]], (i x, i y ) [[, k]] 2 et i x + i y + i z w z i x,i y,i z 7
(k+2)(k+3) fonctions : 6 { ˆv (ix,iy,i z)/i x + i y + i z k} dont on choisit pour dégrés de liberté une base de P k 1.")
10 k + 1 } avec _ w x i x,i y (x, y) = p ix (x)l iy (y)l iz (z) _ w y i x,i y,i z (x, y, z) = l ix (x)p iy (y)l iz (z) _ w z i x,i y,i z (x, y, z) = l ix (x)l iy (y)p iz (z) On rémarque que p i ( 1) = δ i, et p i (1) = δ i,k+1 Ce qui permet d'assurer la continuité aux interfaces en plaçant les degrés de liberté associés aux fonctions w x 1,i y,i z sur l'interface gauche de ˆK et sur l'interface droite ceux associés à w x 1,i y,i z. 2_ Applications 2.1_ Application de l'élement ni de Raviart-Thomas-Nedelec au problème de Stokes La géneralisation de la méthode des élements nis à un système d'équations aux derivées partielles ne posent pas de problèmes particuliers. Ce n'est pas le cas par exemple pour les équations de Stokes à cause de la condition d'incompressibilité du uide ou condition de divergence nulle pour la vitesse. Dans un domaine borné Ω R N,en présence des forces exterieures f,les équations de Stokes s'ecrivent : p ν u = f dans Ω divu = dans Ω (3) u = sur Ω ν > est la viscosité du uide u represente le champ de vitesse de l'écoulement p represente la pression. La formulation variationelle s'ecrit : trouver u V telque Ω ν u v = fvdx v V Ω où V est l'espace de Hilbert déni par V={ v H 1 (Ω) tq divv = pp dans Ω } Comme V contient la contrainte d'incompressibilité divv=,il est très dicile de construire une approximation par la méthode des des élements nis de la formulation variationelle ainsi présentée. 8

11 Plus précisement,la diculté est de dénir un sous-espace vectoriel de dimension nie V h inclu dans V dont les élements s'ecrivent grace aux fonctions de bases P k ou Q k. Par exemple si T h est une triangulation régulière de l'ouvert Ω,on peut dénir V h = {v C (Ω), divv = dans Ω, v\ K Pk N K T h, v = sur Ω} Mais il n'est pas clair que V h ne soit pas trop pétit. En outre il faudrait construire une base de V h qui vérie la condition divv=. Donc en géneral on utilise pas la formulation variationnelle donnée ci-dessus. En pratique,on introduit une autre formulation variationnelle qui consiste à ne pas forcer l'incompressibilité dans la dénition de l'espace et à garder la pression comme inconnue dans la formulation variationnelle. Donc dans notre système d'équations,en multipliant la prémière équation par une fonction test v H(Ω) 1 et la deuxième par une autre fonction q L 2 (Ω). On obtient après intégration par partie Trouver (u, p) H(Ω) 1 L 2 (Ω) telque : ν u. vdx p.divvdx = fvdx Ω Ω Ω (4) qdivudx = Ω pour tout (v, q) H 1 (Ω) L 2 (Ω) Un interêt supplementaire de cette nouvelle formulation est que la préssion n'a pas eté eliminé et donc il sera possible de la calculer. Pour montrer que le problème admet une solution unique,on utilise ce que l'on appelle la théorie des méthodes mixtes. A ceci nous introduisons les élements nis de Raviart-Thomas-Nédélec. Les elements nis de Raviart-Thomas-Nédélec Approximation de la formulation variationnelle Le problème approché correspondant à notre formulation variationnelle s'ecrit : Trouver (u h, p h ) V h W h telque : ν u h. v h dx p.divv h dx = fv h dx Ω Ω Ω (5) q h divu h dx = Ω pour tout (v h, q h ) V h W h On utilise l'élement ni de Raviart-Thomas-Nédélec adapté à la formulation mixte duale,qui permet d'obtenir un système matricielle très creux. 9

12 Pour pouvoir dénir les sous espaces d'approximation V h et W h,on introduit P l,m,n qui est l'ensemble des polynomes de trois variables de degré l, m, n par rapport respectivement aux variables x,y,z. L'élement ni RT k d'ordre k conduit aux espaces Vh k et W h k denis par : _ Vh k est l'ensemble des fonctions telles que leur restirction dans chaque maille soit P k,k,k _ Wh k est l'ensemble des fonctions w telles que leur restirction dans chaque maille soit P k+1,k,k P k,k+1,k P k,k,k+1 et telles que les fonctions w. n soient continues au niveau des interfaces entre les mailles. Les élements nis de Raviart-Thomas ne sont pas dénis sur les mailles quelconques mais sur l'element de réference ˆK = [ 1, 1] 3 En 3D,les fonctions scalaires de réference ˆv sont développées sur une base de (k +1) 3 fonctions. { ˆv (ix,iy,i z)/i d [[, k]] et d {x, y, z}} dont les degrés de liberté associés sont représentés par des points sur la gure. ˆv (ix,iy,i z) est dénie comme le produit des polynômes de Lagrange aux points de Gauss ˆv (ix,iy,i z)(x, y, z) = l ix (x).l iy (y).l iz (z) _ pour dénir les fonctions vectorielles,on dénit les polynômes {p i / i [[, k+1]]} sur [-1,1] à partir des polynômes de Lagrange associés aux points de Gauss d'ordre k par : p (x) = 1 1 x l (t)dt w 1 x p i (x) = 1 1 w i 1 1 p k+1 (x) = 1 1 x w k l i 1 (t)dt 1 l k (t)dt avec {w i }les points de Gauss d'ordre k _ w h sont dénies sur une base de 3(k + 1) 2 (k + 2) fonctions w { w i x i x x,i y,i z x,i y,i z = /i x [[, k + 1]], (i y, i z ) [[, k]] 2 } { w y i x,i y,i z = w y i x,i y,i z { w i z x,i y,i z = w z i x,i y,i z /i y [[, k + 1]], (i x, i z ) [[, k]] 2 } avec _ w x i x,i y,i z (x, y, z) = p ix (x)l iy (y)l iz (z) /i z [[, k + 1]], (i x, i y ) [[, k]] 2 } (6) 1

13 _ w y i x,i y,i z (x, y, z) = l ix (x)p iy (y)l iz (z) _ w z i x,i y,i z (x, y, z) = l ix (x)l iy (y)p iz (z) On rémarque que p i ( 1) = δ i, et p i (1) = δ i,k+1 Ce qui permet d'assurer la continuité aux interfaces en plaçant les degrés de liberté associés aux fonctions w 1,i x y,i z sur l'interface gauche de ˆK et sur l'interface droite ceux associés à w 1,i x y,i z Les degrés de liberté associés aux fonctions w d sont répresentés par des êches sur la gure Pour obtenir les fonctions de bases sur une maille K n denie par [x n, x n + h x n] [y n, y n + h y n] [z n, z n + h z n] on applique le changement de variable suivant : F n :[x n, x n + h x n] [y n, y n + h y n] [z n, z n + h z n] [ 1, 1] 3 (x, y, z) (2 x xn 1, 2 y yn 1, 2 h x n h y z zn 1) n h z n Une fonction de base v 1 (respectivement w 1 ) s'obtient à partir de v (respectivement w) par la relation v 1 = vof n (respectivement w = wof n). 11
![liberté associés aux fonctions w d sont répresentés par des êches sur la gure Pour obtenir les fonctions de bases sur une maille K n denie par [x n, x n + h x n] [y n, y n + h y n] [z n, z n + h z n]](/docs-images/43/1900604/images/page_13.jpg "on applique le changement de variable suivant : F n :[x n, x n + h x n] [y n, y n + h y n] [z n, z n + h z n] [ 1, 1] 3 (x, y, z) (2 x xn 1, 2 y yn 1, 2 h x n h y z zn 1) n h z n Une fonction de base")
14 12

15 . Répresentation des degrés de liberté de Raviart-Thomas-Nédélec sur une maille 2.2_ Construction de l'élement ni de Nedelec dans H(rot) Les espaces de polynomes utiles à la construction de l'element ni de Nedelec sont : _ P k espace de polynomes de degré k ; _ P k espace des polynomes homogenes de degré k ; _ S k = { u ( P k ) 3 u.(x, y, z) = } espace de champs vectoriels polynomiaux homogène d'ordre k tangente à la sphère unité ; _ R k = (P k 1 ) 3 S k espace de champs de vecteurs polynomiaux de l'element ni d'ordre k et de classe H(rot). Dénition 1 soit (K, P, Σ) déni par : _ K tétraèdre (6 arêtes a i de tangente τ i 4 faces f i de normale n i ) _ P = R k = (P k 1 ) 3 S k _ Σ = Σ k 1 Σ k 2 Σ k 3 avec _ Σ k 1 = { p a i ( p. τ i )q(s)ds, q P k 1 } degrés de liberté d'arête _ Σ k 2 = { p f i ( p n i ). q(s)ds, q (P k 2 ) 3 } degrés de liberté de face _ Σ k 3 = { p K ( p q(s))ds, q (P k 3) 3 (K)} degrés de liberté de volume (K, P, Σ) déni un élement ni dans H(rot) Pour la construction des élements,on doit connaître les dimensions de tous les espaces de polynômes mis en jeux et ce pour tout ordre k. Propriétés 1 Dimensions des espaces polynomiaux à l'ordre k et en dimension n dim P k = C k n+k = (n+k)! n!k! dim (P k ) n = nc k n+k = (n+k)! dim P k = C n 1 Donc dim S k = n+k 2 = (n+k 1)! (n 2)!(k 1)!(k+1) (n 1)!k! (n+k 2)! (n 1)!(k 1)! Donc par exemple en dimension 3 dim R k = dim (P k 1 ) 3 + dim S k = k(k+2)(k+3) 2 13
 = } espace de champs vectoriels polynomiaux homogène d'ordre k tangente à la sphère unité ; _ R k = (P k 1 ) 3 S k espace de champs de vecteurs polynomiaux de l'element ni d'ordre k et de")
16 On a également besoin de connaître le nombre d'élements consécutifs de chacune des trois familles de degrés de liberté pour tout ordre k. Propriétes 2 Cardinal des ensembles de degrés de liberté en dimension 3 card Σ k 1 = 6k card Σ k 2 = 4k(k 1) card Σ k 3 = k(k 1)(k 2) 2 Remarque On remarque que dim R k = card Σ k 1 + card Σ k 2 + card Σ k 3 Tétraèdre de Reference ˆK On s'interesse aux elements nis d'ordre k construits sur un tétraèdre. Dans toute la suite, on utilise la notation classique pour les éléments nis : ˆK désigne le tétraèdre de référence, K désigne un tétraèdre quelconque du maillage, f est une face de ˆK, f une face de K, etc. Selon la méthodologie classique,on travaille sur le tétraèdre de réference ˆK(Voir la gure) construit avec les points (,, ), (1,, ), (, 1, ), (,, 1) avant de revenir au tetraèdre en situation K. 14


17 15
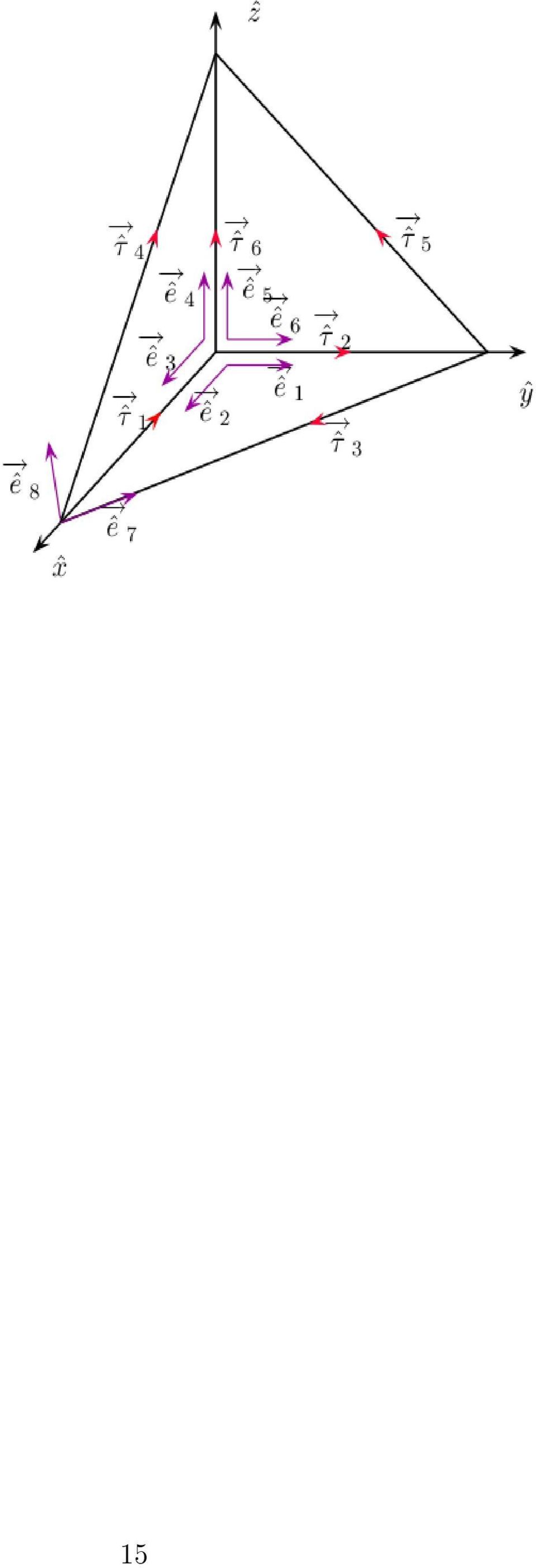
18 Pour dénir les élements nis d'arêtes,on dénit les tangentes à chaque arête ˆτ1 =, ˆτ2 = 1, ˆτ3 = 1, ˆτ4 =, ˆτ5 = 1, 1 1 ˆτ6 = 1 Pour dénir les élements nis de faces on utilise également les huit vecteurs suivants : ê1 = ê 6 1, ê2 = 1 ê 3, ê4 = 1 1 ê 5, ê7 = 1, ê8 = Les vecteurs ( ê i, ê i+1 ) i=1,2,5,7 ainsi construits dénissent des bases orthogonales pour chaque face du tétraèdre ˆK Construction de l'espace R k On cherche les polynômes de base de l'espace d'approximation R k de H(rot, K). Il nous faut donc tout d'abord construire R k dont on rapelle la dénition : R k = (P k 1 ) 3 S k Ainsi pour constuire R k,on a bésoin d'une base de (P k 1 ) 3 et d'une base de S k On prend pour base de (P k 1 ) 3 sa base canonique. L'espace S k est entièrement determiné par l'union des familles de polynômes suivantes : ˆx m 1 ŷ n ẑ k m n+1 ˆx m ŷ n ẑ k m n ˆx m ŷ n 1 ẑ k m n+1 ˆx m ŷ n ẑ k m n ˆx m 1 ŷ n ˆx m ŷ n 1 On va maintenant pouvoir construire les degrés de liberté ˆΣ sur polynôme de ˆp de R k que l'on notéra ˆp 1 (ˆx, ŷ, ẑ) ˆp = ˆp 2 (ˆx, ŷ, ẑ) ˆp 3 (ˆx, ŷ, ẑ) ˆK à partir d'un 16
.")
19 2.3_ Dénition des degrés de liberté 2.3.1_ Degré de liberté d'arête Σ k 1 Pour un élement ni d'ordre k,le nombre de degrés de liberté d'arête est n a = 6k On cherche pour q P k 1 (a i ) le polynôme q = s m 1 pour 1 m kave s l'abscisse curviligne liée à l'arête parcourue dans le sens de la tangente τ i. On doit ensuite choisir une paramétrisation admissible de l'arête pour le calcul des intégrales. Pour les tangentes ˆτ i dénie précédemment,les degrés de liberté d'arête sur ˆK sont alors : Pour 1 m k ; ˆp 1 (1 ˆx,, )ˆx m 1 dˆx ˆp 2 (, ŷ, )ŷ m 1 dŷ (ˆp 1 (ˆx, 1 ˆx, ) ˆp 2 (ˆx, 1 ˆx, ))ˆx m 1 dˆx ( ˆp 1 (1 ˆx,, ˆx) + ˆp 3 (1 ˆx,, ˆx))ˆx m 1 dˆx ( ˆp 2 (, ŷ, 1 ŷ) + ˆp 3 (, ŷ, 1 ˆx))ŷ m 1 dŷ ˆp 3 (,, ẑ)ẑ m 1 dẑ 2.3.2_ Degré de liberté de face Σ k 2 Pour un élement ni d'ordre k,le nombre de degrés de liberté de face est n f = 4k(k 1) Pour le cas des faces,la traduction de la dénition q (P k 2 ) 2 (f i ) est plus délicate car il faut traduire correctement la notion de polynôme d'une face. En outre les vecteurs de la face existent dans R 3.On va dénir les degrés de liberté de faces à l'aide d'une paramétrisation admissible (ξ, η) de la face. On choisit pour cela q = e i ξ m η n et q = q i+1 ξ m η n pour m+n k 2avec( e i, e i+1 ) base de la face dans R 3. Pour les bases ( ê i, ê i+1 ) dénies précedemment,les degrés de liberté de face sur ˆK 17
 + ˆp 3")
20 sont alors : Pour m + n k 2 ; 1 ˆx 1 ˆx 1 ˆx 1 ˆx 1 ŷ 1 ŷ (( ˆp ˆn). ê 1 )(ˆx, ŷ, )ˆx m ŷ n dˆxdŷ (( ˆp ˆn). ê 2 )(ˆx, ŷ, )ˆx m ŷ n dˆxdŷ (( ˆp ˆn). ê 3 )(ˆx,, ẑ)ˆx m ẑ n dˆxdẑ (( ˆp ˆn). ê 4 )(ˆx,, ẑ)ˆx m ẑ n dˆxdẑ (( ˆp ˆn). ê 5 )(, ŷ, ẑ)ŷ m ẑ n dŷdẑ (( ˆp ˆn). ê 6 )(, ŷ, ẑ)ŷ m ẑ n dŷdẑ 1 ˆx 1 ˆx (( ˆp ˆn). ê 7 )(ˆx, ŷ, 1 ˆx ŷ)ˆx m ŷ n dˆxdŷ (( ˆp ˆn). ê 8 )(ˆx, ŷ, 1 ˆx ŷ)ˆx m ŷ n dˆxdŷ 2.3.3_ Degré de liberté de volume Σ k 3 = k(k 1)(k 2) 2 Pour un élement ni d'ordre k,le nombre de degrés de liberté d'arête est n v Dans le cas des degrés de liberté de volume,on traduit la dénition q (P k 3 ) 3 (K) en prenant q = f i x m y n z l pour m + n + k k 3 avec (x, y, z) K et f i vecteur de la base canonique de R 3 Sur le tétraèdre de reference ˆK les degrés de liberté de volume sont donc : Pour m + n + l k 3 ; 1 ˆx 1 ˆx ŷ ˆp 1 (ˆx, ŷ, ẑ)ˆx m ŷ n ẑ l dˆxdŷdẑ 18
(k 2) 2 Pour un élement ni d'ordre k,le nombre de degrés de liberté d'arête est n v Dans le cas des degrés de liberté de volume,on traduit la dénition q (P")
21 1 ˆx 1 ˆx 1 ˆx ŷ 1 ˆx ŷ ˆp 2 (ˆx, ŷ, ẑ)ˆx m ŷ n ẑ l dˆxdŷdẑ ˆp 3 (ˆx, ŷ, ẑ)ˆx m ŷ n ẑ l dˆxdŷdẑ 3_ La méthode des élements nis spectraux 3.1_ Cartographie géométrique Le lien entre l'élement de réference qui nous allons désigner de façon générique par ˆΩ et Ω un autre domaine (qui peut être par exemple un élement d'un maillage ou d'un simple domaine comme dans le cas de la méthode spectrale) se fait au moyen d'une cartographie : ϕ : ˆΩ Ω qui est généralement appelée cartographie géometrique. Selon le choix de ϕ cette carte peut tenir compte des élements avec des bords courbés ou des faces courbées. Sur les cartes,nous faisons quelques hypothèses sur cette transformation (i) La matrice jacobienne de ϕ n'est pas singulière ; (ii) ϕ est une bijection de ˆΩ dans Ω (iii) ϕ est susemment régulière. Notre contruction de la cartographie géométrique est eectuée en considerant un entier positif xe N, deux ensembles de noeuds ˆΣ ˆΩ et Σ Ω et l'interpolation de Lagrange associé aux points de ˆΣ. ˆΣ avec ˆΣ = { ˆx i } N i= et Σ = {x i} N i= Les points de Σ sont appélés des noeuds géométriques. Soit L = {l i } N i= une base de lagrange associée à ˆΣ et M = [m i,j ] la matrice qui contient les coordonnées des points de Σ dans les colonnes qui est également une d (N + 1) matrice. La i ème composante de ϕ est donnée par : N m i,k l k (ˆx), ˆx ˆΣ k= 19
22 Le but de cette partie est de dénir les ensembles de polynômes d'ordre arbitraire dénis dans un domaine partitionné en plusieurs élements. La construction est fondée sur le fait que chaque élement est l'image par une transfomation géometrique de ce type. 2
23 Bibliographie [1] P.A. Raviart & J.M. Thomas,A mixted Finit Element Method for Second Order Elliptic Problems,Lecture Notes in Mathematics,1977 [2] J.C. Nédélec,A new family of mixed nite elements in R 3, Numerische Mathematik,1986 [3] Robert.C. Kirby,A New Paradigm for Computing Finite Element Basis Functions, Fiat-Toms,24 [4] M.Barrault Extention du code SPn-GLASS à l'élément ni RTk Note Interne EDF R&D, 26 21
24 Annexes Outils mathématiques 22
Sujet proposé par Yves M. LEROY. Cet examen se compose d un exercice et de deux problèmes. Ces trois parties sont indépendantes.
 Promotion X 004 COURS D ANALYSE DES STRUCTURES MÉCANIQUES PAR LA MÉTHODE DES ELEMENTS FINIS (MEC 568) contrôle non classant (7 mars 007, heures) Documents autorisés : polycopié ; documents et notes de
Promotion X 004 COURS D ANALYSE DES STRUCTURES MÉCANIQUES PAR LA MÉTHODE DES ELEMENTS FINIS (MEC 568) contrôle non classant (7 mars 007, heures) Documents autorisés : polycopié ; documents et notes de
Fonctions de plusieurs variables : dérivés partielles, diérentielle. Fonctions composées. Fonctions de classe C 1. Exemples
 45 Fonctions de plusieurs variables : dérivés partielles, diérentielle. Fonctions composées. Fonctions de classe C 1. Exemples Les espaces vectoriels considérés sont réels, non réduits au vecteur nul et
45 Fonctions de plusieurs variables : dérivés partielles, diérentielle. Fonctions composées. Fonctions de classe C 1. Exemples Les espaces vectoriels considérés sont réels, non réduits au vecteur nul et
Examen optimisation Centrale Marseille (2008) et SupGalilee (2008)
 et SupGalilee (2008)") Examen optimisation Centrale Marseille (28) et SupGalilee (28) Olivier Latte, Jean-Michel Innocent, Isabelle Terrasse, Emmanuel Audusse, Francois Cuvelier duree 4 h Tout resultat enonce dans le texte peut
Examen optimisation Centrale Marseille (28) et SupGalilee (28) Olivier Latte, Jean-Michel Innocent, Isabelle Terrasse, Emmanuel Audusse, Francois Cuvelier duree 4 h Tout resultat enonce dans le texte peut
= 1 si n = m& où n et m sont souvent des indices entiers, par exemple, n, m = 0, 1, 2, 3, 4... En fait,! n m
 1 épartement de Physique, Université Laval, Québec Pierre Amiot, 1. La fonction delta et certaines de ses utilisations. Clientèle Ce texte est destiné aux physiciens, ingénieurs et autres scientifiques.
1 épartement de Physique, Université Laval, Québec Pierre Amiot, 1. La fonction delta et certaines de ses utilisations. Clientèle Ce texte est destiné aux physiciens, ingénieurs et autres scientifiques.
chapitre 4 Nombres de Catalan
 chapitre 4 Nombres de Catalan I Dénitions Dénition 1 La suite de Catalan (C n ) n est la suite dénie par C 0 = 1 et, pour tout n N, C n+1 = C k C n k. Exemple 2 On trouve rapidement C 0 = 1, C 1 = 1, C
chapitre 4 Nombres de Catalan I Dénitions Dénition 1 La suite de Catalan (C n ) n est la suite dénie par C 0 = 1 et, pour tout n N, C n+1 = C k C n k. Exemple 2 On trouve rapidement C 0 = 1, C 1 = 1, C
Cours 02 : Problème général de la programmation linéaire
 Cours 02 : Problème général de la programmation linéaire Cours 02 : Problème général de la Programmation Linéaire. 5 . Introduction Un programme linéaire s'écrit sous la forme suivante. MinZ(ou maxw) =
Cours 02 : Problème général de la programmation linéaire Cours 02 : Problème général de la Programmation Linéaire. 5 . Introduction Un programme linéaire s'écrit sous la forme suivante. MinZ(ou maxw) =
2. RAPPEL DES TECHNIQUES DE CALCUL DANS R
 2. RAPPEL DES TECHNIQUES DE CALCUL DANS R Dans la mesure où les résultats de ce chapitre devraient normalement être bien connus, il n'est rappelé que les formules les plus intéressantes; les justications
2. RAPPEL DES TECHNIQUES DE CALCUL DANS R Dans la mesure où les résultats de ce chapitre devraient normalement être bien connus, il n'est rappelé que les formules les plus intéressantes; les justications
Souad EL Bernoussi. Groupe d Analyse Numérique et Optimisation Rabat http ://www.fsr.ac.ma/ano/
 Recherche opérationnelle Les démonstrations et les exemples seront traités en cours Souad EL Bernoussi Groupe d Analyse Numérique et Optimisation Rabat http ://www.fsr.ac.ma/ano/ Table des matières 1 Programmation
Recherche opérationnelle Les démonstrations et les exemples seront traités en cours Souad EL Bernoussi Groupe d Analyse Numérique et Optimisation Rabat http ://www.fsr.ac.ma/ano/ Table des matières 1 Programmation
La programmation linéaire : une introduction. Qu est-ce qu un programme linéaire? Terminologie. Écriture mathématique
 La programmation linéaire : une introduction Qu est-ce qu un programme linéaire? Qu est-ce qu un programme linéaire? Exemples : allocation de ressources problème de recouvrement Hypothèses de la programmation
La programmation linéaire : une introduction Qu est-ce qu un programme linéaire? Qu est-ce qu un programme linéaire? Exemples : allocation de ressources problème de recouvrement Hypothèses de la programmation
Fonctions de plusieurs variables
 Module : Analyse 03 Chapitre 00 : Fonctions de plusieurs variables Généralités et Rappels des notions topologiques dans : Qu est- ce que?: Mathématiquement, n étant un entier non nul, on définit comme
Module : Analyse 03 Chapitre 00 : Fonctions de plusieurs variables Généralités et Rappels des notions topologiques dans : Qu est- ce que?: Mathématiquement, n étant un entier non nul, on définit comme
NOTATIONS PRÉLIMINAIRES
 Pour le Jeudi 14 Octobre 2010 NOTATIONS Soit V un espace vectoriel réel ; l'espace vectoriel des endomorphismes de l'espace vectoriel V est désigné par L(V ). Soit f un endomorphisme de l'espace vectoriel
Pour le Jeudi 14 Octobre 2010 NOTATIONS Soit V un espace vectoriel réel ; l'espace vectoriel des endomorphismes de l'espace vectoriel V est désigné par L(V ). Soit f un endomorphisme de l'espace vectoriel
Chapitre 1 Cinématique du point matériel
 Chapitre 1 Cinématique du point matériel 7 1.1. Introduction 1.1.1. Domaine d étude Le programme de mécanique de math sup se limite à l étude de la mécanique classique. Sont exclus : la relativité et la
Chapitre 1 Cinématique du point matériel 7 1.1. Introduction 1.1.1. Domaine d étude Le programme de mécanique de math sup se limite à l étude de la mécanique classique. Sont exclus : la relativité et la
THÈSE PRÉSENTÉE À L'UNIVERSITÉ DE BORDEAUX I ÉCOLE DOCTORALE DE MATHÉMATIQUES ET D'INFORMATIQUE. Par Bruno LATHUILIÈRE POUR OBTENIR LE GRADE DE
 N o d'ordre : 41 THÈSE PRÉSENTÉE À L'UNIVERSITÉ DE BORDEAUX I ÉCOLE DOCTORALE DE MATHÉMATIQUES ET D'INFORMATIQUE Par Bruno LATHUILIÈRE POUR OBTENIR LE GRADE DE DOCTEUR SPÉCIALITÉ : INFORMATIQUE Méthode
N o d'ordre : 41 THÈSE PRÉSENTÉE À L'UNIVERSITÉ DE BORDEAUX I ÉCOLE DOCTORALE DE MATHÉMATIQUES ET D'INFORMATIQUE Par Bruno LATHUILIÈRE POUR OBTENIR LE GRADE DE DOCTEUR SPÉCIALITÉ : INFORMATIQUE Méthode
Méthodes de quadrature. Polytech Paris-UPMC. - p. 1/48
 Méthodes de Polytech Paris-UPMC - p. 1/48 Polynôme d interpolation de Preuve et polynôme de Calcul de l erreur d interpolation Étude de la formule d erreur Autres méthodes - p. 2/48 Polynôme d interpolation
Méthodes de Polytech Paris-UPMC - p. 1/48 Polynôme d interpolation de Preuve et polynôme de Calcul de l erreur d interpolation Étude de la formule d erreur Autres méthodes - p. 2/48 Polynôme d interpolation
Formes quadratiques. 1 Formes quadratiques et formes polaires associées. Imen BHOURI. 1.1 Définitions
 Formes quadratiques Imen BHOURI 1 Ce cours s adresse aux étudiants de niveau deuxième année de Licence et à ceux qui préparent le capes. Il combine d une façon indissociable l étude des concepts bilinéaires
Formes quadratiques Imen BHOURI 1 Ce cours s adresse aux étudiants de niveau deuxième année de Licence et à ceux qui préparent le capes. Il combine d une façon indissociable l étude des concepts bilinéaires
Programmation linéaire et Optimisation. Didier Smets
 Programmation linéaire et Optimisation Didier Smets Chapitre 1 Un problème d optimisation linéaire en dimension 2 On considère le cas d un fabricant d automobiles qui propose deux modèles à la vente, des
Programmation linéaire et Optimisation Didier Smets Chapitre 1 Un problème d optimisation linéaire en dimension 2 On considère le cas d un fabricant d automobiles qui propose deux modèles à la vente, des
3 Approximation de solutions d équations
 3 Approximation de solutions d équations Une équation scalaire a la forme générale f(x) =0où f est une fonction de IR dans IR. Un système de n équations à n inconnues peut aussi se mettre sous une telle
3 Approximation de solutions d équations Une équation scalaire a la forme générale f(x) =0où f est une fonction de IR dans IR. Un système de n équations à n inconnues peut aussi se mettre sous une telle
Fonctions de plusieurs variables
 Maths MP Exercices Fonctions de plusieurs variables Les indications ne sont ici que pour être consultées après le T (pour les exercices non traités). Avant et pendant le T, tenez bon et n allez pas les
Maths MP Exercices Fonctions de plusieurs variables Les indications ne sont ici que pour être consultées après le T (pour les exercices non traités). Avant et pendant le T, tenez bon et n allez pas les
Théorie et codage de l information
 Théorie et codage de l information Les codes linéaires - Chapitre 6 - Principe Définition d un code linéaire Soient p un nombre premier et s est un entier positif. Il existe un unique corps de taille q
Théorie et codage de l information Les codes linéaires - Chapitre 6 - Principe Définition d un code linéaire Soient p un nombre premier et s est un entier positif. Il existe un unique corps de taille q
Analyse en Composantes Principales
 Analyse en Composantes Principales Anne B Dufour Octobre 2013 Anne B Dufour () Analyse en Composantes Principales Octobre 2013 1 / 36 Introduction Introduction Soit X un tableau contenant p variables mesurées
Analyse en Composantes Principales Anne B Dufour Octobre 2013 Anne B Dufour () Analyse en Composantes Principales Octobre 2013 1 / 36 Introduction Introduction Soit X un tableau contenant p variables mesurées
Correction de l examen de la première session
 de l examen de la première session Julian Tugaut, Franck Licini, Didier Vincent Si vous trouvez des erreurs de Français ou de mathématiques ou bien si vous avez des questions et/ou des suggestions, envoyez-moi
de l examen de la première session Julian Tugaut, Franck Licini, Didier Vincent Si vous trouvez des erreurs de Français ou de mathématiques ou bien si vous avez des questions et/ou des suggestions, envoyez-moi
Géométrie dans l espace Produit scalaire et équations
 Chapitre 11. 2ème partie Géométrie dans l espace Produit scalaire et équations Terminale S Ce que dit le programme : CONTENUS CAPACITÉS ATTENDUES COMMENTAIRES 2ème partie Produit scalaire Produit scalaire
Chapitre 11. 2ème partie Géométrie dans l espace Produit scalaire et équations Terminale S Ce que dit le programme : CONTENUS CAPACITÉS ATTENDUES COMMENTAIRES 2ème partie Produit scalaire Produit scalaire
Résolution de systèmes linéaires par des méthodes directes
 Résolution de systèmes linéaires par des méthodes directes J. Erhel Janvier 2014 1 Inverse d une matrice carrée et systèmes linéaires Ce paragraphe a pour objet les matrices carrées et les systèmes linéaires.
Résolution de systèmes linéaires par des méthodes directes J. Erhel Janvier 2014 1 Inverse d une matrice carrée et systèmes linéaires Ce paragraphe a pour objet les matrices carrées et les systèmes linéaires.
Optimisation non linéaire Irène Charon, Olivier Hudry École nationale supérieure des télécommunications
 Optimisation non linéaire Irène Charon, Olivier Hudry École nationale supérieure des télécommunications A. Optimisation sans contrainte.... Généralités.... Condition nécessaire et condition suffisante
Optimisation non linéaire Irène Charon, Olivier Hudry École nationale supérieure des télécommunications A. Optimisation sans contrainte.... Généralités.... Condition nécessaire et condition suffisante
Calcul intégral élémentaire en plusieurs variables
 Calcul intégral élémentaire en plusieurs variables PC*2 2 septembre 2009 Avant-propos À part le théorème de Fubini qui sera démontré dans le cours sur les intégrales à paramètres et qui ne semble pas explicitement
Calcul intégral élémentaire en plusieurs variables PC*2 2 septembre 2009 Avant-propos À part le théorème de Fubini qui sera démontré dans le cours sur les intégrales à paramètres et qui ne semble pas explicitement
Catalogue des connaissances de base en mathématiques dispensées dans les gymnases, lycées et collèges romands.
 Catalogue des connaissances de base en mathématiques dispensées dans les gymnases, lycées et collèges romands. Pourquoi un autre catalogue en Suisse romande Historique En 1990, la CRUS (Conférences des
Catalogue des connaissances de base en mathématiques dispensées dans les gymnases, lycées et collèges romands. Pourquoi un autre catalogue en Suisse romande Historique En 1990, la CRUS (Conférences des
Programmes des classes préparatoires aux Grandes Ecoles
 Programmes des classes préparatoires aux Grandes Ecoles Filière : scientifique Voie : Biologie, chimie, physique et sciences de la Terre (BCPST) Discipline : Mathématiques Seconde année Préambule Programme
Programmes des classes préparatoires aux Grandes Ecoles Filière : scientifique Voie : Biologie, chimie, physique et sciences de la Terre (BCPST) Discipline : Mathématiques Seconde année Préambule Programme
Différentiabilité ; Fonctions de plusieurs variables réelles
 Différentiabilité ; Fonctions de plusieurs variables réelles Denis Vekemans R n est muni de l une des trois normes usuelles. 1,. 2 ou.. x 1 = i i n Toutes les normes de R n sont équivalentes. x i ; x 2
Différentiabilité ; Fonctions de plusieurs variables réelles Denis Vekemans R n est muni de l une des trois normes usuelles. 1,. 2 ou.. x 1 = i i n Toutes les normes de R n sont équivalentes. x i ; x 2
Mesures gaussiennes et espaces de Fock
 Mesures gaussiennes et espaces de Fock Thierry Lévy Peyresq - Juin 2003 Introduction Les mesures gaussiennes et les espaces de Fock sont deux objets qui apparaissent naturellement et peut-être, à première
Mesures gaussiennes et espaces de Fock Thierry Lévy Peyresq - Juin 2003 Introduction Les mesures gaussiennes et les espaces de Fock sont deux objets qui apparaissent naturellement et peut-être, à première
Correction du Baccalauréat S Amérique du Nord mai 2007
 Correction du Baccalauréat S Amérique du Nord mai 7 EXERCICE points. Le plan (P) a une pour équation cartésienne : x+y z+ =. Les coordonnées de H vérifient cette équation donc H appartient à (P) et A n
Correction du Baccalauréat S Amérique du Nord mai 7 EXERCICE points. Le plan (P) a une pour équation cartésienne : x+y z+ =. Les coordonnées de H vérifient cette équation donc H appartient à (P) et A n
Cours d analyse numérique SMI-S4
 ours d analyse numérique SMI-S4 Introduction L objet de l analyse numérique est de concevoir et d étudier des méthodes de résolution de certains problèmes mathématiques, en général issus de problèmes réels,
ours d analyse numérique SMI-S4 Introduction L objet de l analyse numérique est de concevoir et d étudier des méthodes de résolution de certains problèmes mathématiques, en général issus de problèmes réels,
Polynômes à plusieurs variables. Résultant
 Polynômes à plusieurs variables. Résultant Christophe Ritzenthaler 1 Relations coefficients-racines. Polynômes symétriques Issu de [MS] et de [Goz]. Soit A un anneau intègre. Définition 1.1. Soit a A \
Polynômes à plusieurs variables. Résultant Christophe Ritzenthaler 1 Relations coefficients-racines. Polynômes symétriques Issu de [MS] et de [Goz]. Soit A un anneau intègre. Définition 1.1. Soit a A \
Cours d Analyse. Fonctions de plusieurs variables
 Cours d Analyse Fonctions de plusieurs variables Licence 1ère année 2007/2008 Nicolas Prioux Université de Marne-la-Vallée Table des matières 1 Notions de géométrie dans l espace et fonctions à deux variables........
Cours d Analyse Fonctions de plusieurs variables Licence 1ère année 2007/2008 Nicolas Prioux Université de Marne-la-Vallée Table des matières 1 Notions de géométrie dans l espace et fonctions à deux variables........
Approximations variationelles des EDP Notes du Cours de M2
 Approximations variationelles des EDP Notes du Cours de M2 Albert Cohen Dans ce cours, on s intéresse à l approximation numérique d équations aux dérivées partielles linéaires qui admettent une formulation
Approximations variationelles des EDP Notes du Cours de M2 Albert Cohen Dans ce cours, on s intéresse à l approximation numérique d équations aux dérivées partielles linéaires qui admettent une formulation
Notes du cours d'équations aux Dérivées Partielles de l'isima, troisième année http://www.isima.fr/leborgne
 Notes du cours d'équations aux Dérivées Partielles de l'isima, troisième année http://www.isima.fr/leborgne Comprendre la condition inf-sup numérique : application aux problèmes sous contrainte. Exemples
Notes du cours d'équations aux Dérivées Partielles de l'isima, troisième année http://www.isima.fr/leborgne Comprendre la condition inf-sup numérique : application aux problèmes sous contrainte. Exemples
Programmation linéaire
 Programmation linéaire DIDIER MAQUIN Ecole Nationale Supérieure d Electricité et de Mécanique Institut National Polytechnique de Lorraine Mathématiques discrètes cours de 2ème année Programmation linéaire
Programmation linéaire DIDIER MAQUIN Ecole Nationale Supérieure d Electricité et de Mécanique Institut National Polytechnique de Lorraine Mathématiques discrètes cours de 2ème année Programmation linéaire
Fonctions de plusieurs variables. Sébastien Tordeux
 Fonctions de plusieurs variables Sébastien Tordeux 22 février 2009 Table des matières 1 Fonctions de plusieurs variables 3 1.1 Définition............................. 3 1.2 Limite et continuité.......................
Fonctions de plusieurs variables Sébastien Tordeux 22 février 2009 Table des matières 1 Fonctions de plusieurs variables 3 1.1 Définition............................. 3 1.2 Limite et continuité.......................
Corrigé du baccalauréat S Pondichéry 12 avril 2007
 Corrigé du baccalauréat S Pondichéry 1 avril 7 EXERCICE 1 Commun à tous les candidats 4 points 1 a Les vecteurs AB et AC ont pour coordonnées AB ; ; ) et AC 1 ; 4 ; 1) Ils ne sont manifestement pas colinéaires
Corrigé du baccalauréat S Pondichéry 1 avril 7 EXERCICE 1 Commun à tous les candidats 4 points 1 a Les vecteurs AB et AC ont pour coordonnées AB ; ; ) et AC 1 ; 4 ; 1) Ils ne sont manifestement pas colinéaires
Compte rendu des TP matlab
 Compte rendu des TP matlab Krell Stella, Minjeaud Sebastian 18 décembre 006 1 TP1, Discrétisation de problèmes elliptiques linéaires 1d Soient > 0, a R, b 0, c, d R et f C([0, 1], R). On cerce à approcer
Compte rendu des TP matlab Krell Stella, Minjeaud Sebastian 18 décembre 006 1 TP1, Discrétisation de problèmes elliptiques linéaires 1d Soient > 0, a R, b 0, c, d R et f C([0, 1], R). On cerce à approcer
Exercices Corrigés Premières notions sur les espaces vectoriels
 Exercices Corrigés Premières notions sur les espaces vectoriels Exercice 1 On considére le sous-espace vectoriel F de R formé des solutions du système suivant : x1 x 2 x 3 + 2x = 0 E 1 x 1 + 2x 2 + x 3
Exercices Corrigés Premières notions sur les espaces vectoriels Exercice 1 On considére le sous-espace vectoriel F de R formé des solutions du système suivant : x1 x 2 x 3 + 2x = 0 E 1 x 1 + 2x 2 + x 3
Cours de Mécanique du point matériel
 Cours de Mécanique du point matériel SMPC1 Module 1 : Mécanique 1 Session : Automne 2014 Prof. M. EL BAZ Cours de Mécanique du Point matériel Chapitre 1 : Complément Mathématique SMPC1 Chapitre 1: Rappels
Cours de Mécanique du point matériel SMPC1 Module 1 : Mécanique 1 Session : Automne 2014 Prof. M. EL BAZ Cours de Mécanique du Point matériel Chapitre 1 : Complément Mathématique SMPC1 Chapitre 1: Rappels
t 100. = 8 ; le pourcentage de réduction est : 8 % 1 t Le pourcentage d'évolution (appelé aussi taux d'évolution) est le nombre :
 est le nombre :") Terminale STSS 2 012 2 013 Pourcentages Synthèse 1) Définition : Calculer t % d'un nombre, c'est multiplier ce nombre par t 100. 2) Exemples de calcul : a) Calcul d un pourcentage : Un article coûtant
Terminale STSS 2 012 2 013 Pourcentages Synthèse 1) Définition : Calculer t % d'un nombre, c'est multiplier ce nombre par t 100. 2) Exemples de calcul : a) Calcul d un pourcentage : Un article coûtant
Calcul différentiel sur R n Première partie
 Calcul différentiel sur R n Première partie Université De Metz 2006-2007 1 Définitions générales On note L(R n, R m ) l espace vectoriel des applications linéaires de R n dans R m. Définition 1.1 (différentiabilité
Calcul différentiel sur R n Première partie Université De Metz 2006-2007 1 Définitions générales On note L(R n, R m ) l espace vectoriel des applications linéaires de R n dans R m. Définition 1.1 (différentiabilité
Fonctions de plusieurs variables, intégrales multiples, et intégrales dépendant d un paramètre
 IUFM du Limousin 2009-10 PLC1 Mathématiques S. Vinatier Rappels de cours Fonctions de plusieurs variables, intégrales multiples, et intégrales dépendant d un paramètre 1 Fonctions de plusieurs variables
IUFM du Limousin 2009-10 PLC1 Mathématiques S. Vinatier Rappels de cours Fonctions de plusieurs variables, intégrales multiples, et intégrales dépendant d un paramètre 1 Fonctions de plusieurs variables
1 Complément sur la projection du nuage des individus
 TP 0 : Analyse en composantes principales (II) Le but de ce TP est d approfondir nos connaissances concernant l analyse en composantes principales (ACP). Pour cela, on reprend les notations du précédent
TP 0 : Analyse en composantes principales (II) Le but de ce TP est d approfondir nos connaissances concernant l analyse en composantes principales (ACP). Pour cela, on reprend les notations du précédent
CNAM UE MVA 210 Ph. Durand Algèbre et analyse tensorielle Cours 4: Calcul dierentiel 2
 CNAM UE MVA 210 Ph. Duran Algèbre et analyse tensorielle Cours 4: Calcul ierentiel 2 Jeui 26 octobre 2006 1 Formes iérentielles e egrés 1 Dès l'introuction es bases u calcul iérentiel, nous avons mis en
CNAM UE MVA 210 Ph. Duran Algèbre et analyse tensorielle Cours 4: Calcul ierentiel 2 Jeui 26 octobre 2006 1 Formes iérentielles e egrés 1 Dès l'introuction es bases u calcul iérentiel, nous avons mis en
Méthode des éléments-finis par l exemple
 par l exemple Daniel Choï 1 LMNO Groupe Mécanique Modélisation Mathématique et Numérique Université de Caen, Bld Maréchal Juin, 14032 Caen Cedex, France Version Avril 2010 1. [email protected] Ce
par l exemple Daniel Choï 1 LMNO Groupe Mécanique Modélisation Mathématique et Numérique Université de Caen, Bld Maréchal Juin, 14032 Caen Cedex, France Version Avril 2010 1. [email protected] Ce
Programmation linéaire
 1 Programmation linéaire 1. Le problème, un exemple. 2. Le cas b = 0 3. Théorème de dualité 4. L algorithme du simplexe 5. Problèmes équivalents 6. Complexité de l Algorithme 2 Position du problème Soit
1 Programmation linéaire 1. Le problème, un exemple. 2. Le cas b = 0 3. Théorème de dualité 4. L algorithme du simplexe 5. Problèmes équivalents 6. Complexité de l Algorithme 2 Position du problème Soit
Corrigé du baccalauréat S Asie 21 juin 2010
 Corrigé du baccalauréat S Asie juin 00 EXERCICE Commun à tous les candidats 4 points. Question : Le triangle GBI est : Réponse a : isocèle. Réponse b : équilatéral. Réponse c : rectangle. On a GB = + =
Corrigé du baccalauréat S Asie juin 00 EXERCICE Commun à tous les candidats 4 points. Question : Le triangle GBI est : Réponse a : isocèle. Réponse b : équilatéral. Réponse c : rectangle. On a GB = + =
Une introduction aux codes correcteurs quantiques
 Une introduction aux codes correcteurs quantiques Jean-Pierre Tillich INRIA Rocquencourt, équipe-projet SECRET 20 mars 2008 1/38 De quoi est-il question ici? Code quantique : il est possible de corriger
Une introduction aux codes correcteurs quantiques Jean-Pierre Tillich INRIA Rocquencourt, équipe-projet SECRET 20 mars 2008 1/38 De quoi est-il question ici? Code quantique : il est possible de corriger
Une premiere approche des elements nis sur un exemple tres simple
 EDP MTH Analyse 2215 EmmanuelFrenod numeri Premiere partie Une premiere approche s elements nis un exemple tres simple 1 Equation la chaleur dans barre 2 Resolution u00 f [0;1] par elements nis avec un
EDP MTH Analyse 2215 EmmanuelFrenod numeri Premiere partie Une premiere approche s elements nis un exemple tres simple 1 Equation la chaleur dans barre 2 Resolution u00 f [0;1] par elements nis avec un
www.h-k.fr/publications/objectif-agregation
 «Sur C, tout est connexe!» www.h-k.fr/publications/objectif-agregation L idée de cette note est de montrer que, contrairement à ce qui se passe sur R, «sur C, tout est connexe». Cet abus de langage se
«Sur C, tout est connexe!» www.h-k.fr/publications/objectif-agregation L idée de cette note est de montrer que, contrairement à ce qui se passe sur R, «sur C, tout est connexe». Cet abus de langage se
Première partie. Préliminaires : noyaux itérés. MPSI B 6 juin 2015
 Énoncé Soit V un espace vectoriel réel. L espace vectoriel des endomorphismes de V est désigné par L(V ). Lorsque f L(V ) et k N, on désigne par f 0 = Id V, f k = f k f la composée de f avec lui même k
Énoncé Soit V un espace vectoriel réel. L espace vectoriel des endomorphismes de V est désigné par L(V ). Lorsque f L(V ) et k N, on désigne par f 0 = Id V, f k = f k f la composée de f avec lui même k
Structures algébriques
 Structures algébriques 1. Lois de composition s Soit E un ensemble. Une loi de composition interne sur E est une application de E E dans E. Soient E et F deux ensembles. Une loi de composition externe
Structures algébriques 1. Lois de composition s Soit E un ensemble. Une loi de composition interne sur E est une application de E E dans E. Soient E et F deux ensembles. Une loi de composition externe
Chafa Azzedine - Faculté de Physique U.S.T.H.B 1
 Chafa Azzedine - Faculté de Physique U.S.T.H.B 1 Définition: La cinématique est une branche de la mécanique qui étudie les mouements des corps dans l espace en fonction du temps indépendamment des causes
Chafa Azzedine - Faculté de Physique U.S.T.H.B 1 Définition: La cinématique est une branche de la mécanique qui étudie les mouements des corps dans l espace en fonction du temps indépendamment des causes
Plan du cours : électricité 1
 Semestre : S2 Module Physique II 1 Electricité 1 2 Optique géométrique Plan du cours : électricité 1 Partie A : Electrostatique (discipline de l étude des phénomènes liés aux distributions de charges stationnaires)
Semestre : S2 Module Physique II 1 Electricité 1 2 Optique géométrique Plan du cours : électricité 1 Partie A : Electrostatique (discipline de l étude des phénomènes liés aux distributions de charges stationnaires)
I. Polynômes de Tchebychev
 Première épreuve CCP filière MP I. Polynômes de Tchebychev ( ) 1.a) Tout réel θ vérifie cos(nθ) = Re ((cos θ + i sin θ) n ) = Re Cn k (cos θ) n k i k (sin θ) k Or i k est réel quand k est pair et imaginaire
Première épreuve CCP filière MP I. Polynômes de Tchebychev ( ) 1.a) Tout réel θ vérifie cos(nθ) = Re ((cos θ + i sin θ) n ) = Re Cn k (cos θ) n k i k (sin θ) k Or i k est réel quand k est pair et imaginaire
Continuité et dérivabilité d une fonction
 DERNIÈRE IMPRESSIN LE 7 novembre 014 à 10:3 Continuité et dérivabilité d une fonction Table des matières 1 Continuité d une fonction 1.1 Limite finie en un point.......................... 1. Continuité
DERNIÈRE IMPRESSIN LE 7 novembre 014 à 10:3 Continuité et dérivabilité d une fonction Table des matières 1 Continuité d une fonction 1.1 Limite finie en un point.......................... 1. Continuité
La Licence Mathématiques et Economie-MASS Université de Sciences Sociales de Toulouse 1
 La Licence Mathématiques et Economie-MASS Université de Sciences Sociales de Toulouse 1 La licence Mathématiques et Economie-MASS de l Université des Sciences Sociales de Toulouse propose sur les trois
La Licence Mathématiques et Economie-MASS Université de Sciences Sociales de Toulouse 1 La licence Mathématiques et Economie-MASS de l Université des Sciences Sociales de Toulouse propose sur les trois
Chapitre 2. Matrices
 Département de mathématiques et informatique L1S1, module A ou B Chapitre 2 Matrices Emmanuel Royer emmanuelroyer@mathuniv-bpclermontfr Ce texte mis gratuitement à votre disposition a été rédigé grâce
Département de mathématiques et informatique L1S1, module A ou B Chapitre 2 Matrices Emmanuel Royer emmanuelroyer@mathuniv-bpclermontfr Ce texte mis gratuitement à votre disposition a été rédigé grâce
Baccalauréat S Antilles-Guyane 11 septembre 2014 Corrigé
 Baccalauréat S ntilles-guyane 11 septembre 14 Corrigé EXERCICE 1 6 points Commun à tous les candidats Une entreprise de jouets en peluche souhaite commercialiser un nouveau produit et à cette fin, effectue
Baccalauréat S ntilles-guyane 11 septembre 14 Corrigé EXERCICE 1 6 points Commun à tous les candidats Une entreprise de jouets en peluche souhaite commercialiser un nouveau produit et à cette fin, effectue
Notes du cours MTH1101 Calcul I Partie II: fonctions de plusieurs variables
 Notes du cours MTH1101 Calcul I Partie II: fonctions de plusieurs variables Guy Desaulniers Département de mathématiques et de génie industriel École Polytechnique de Montréal Automne 2014 Table des matières
Notes du cours MTH1101 Calcul I Partie II: fonctions de plusieurs variables Guy Desaulniers Département de mathématiques et de génie industriel École Polytechnique de Montréal Automne 2014 Table des matières
Fonctions de deux variables. Mai 2011
 Fonctions de deux variables Dédou Mai 2011 D une à deux variables Les fonctions modèlisent de l information dépendant d un paramètre. On a aussi besoin de modéliser de l information dépendant de plusieurs
Fonctions de deux variables Dédou Mai 2011 D une à deux variables Les fonctions modèlisent de l information dépendant d un paramètre. On a aussi besoin de modéliser de l information dépendant de plusieurs
Fonctions de plusieurs variables et changements de variables
 Notes du cours d'équations aux Dérivées Partielles de l'isima, première année http://wwwisimafr/leborgne Fonctions de plusieurs variables et changements de variables Gilles Leborgne juin 006 Table des
Notes du cours d'équations aux Dérivées Partielles de l'isima, première année http://wwwisimafr/leborgne Fonctions de plusieurs variables et changements de variables Gilles Leborgne juin 006 Table des
Calculs et Certificats de Quantités d Intérêts Non Linéaires d un Mousqueton Cédric Bellis
 Ecole Normale Supérieure de Cachan Département de Génie Mécanique Rapport de Stage de M1 Mécanique et Ingéniérie des Systèmes Stage effectué du 10/04 au 27/08 Laboratori de Càlcul Numèric - Universitat
Ecole Normale Supérieure de Cachan Département de Génie Mécanique Rapport de Stage de M1 Mécanique et Ingéniérie des Systèmes Stage effectué du 10/04 au 27/08 Laboratori de Càlcul Numèric - Universitat
Axiomatique de N, construction de Z
 Axiomatique de N, construction de Z Table des matières 1 Axiomatique de N 2 1.1 Axiomatique ordinale.................................. 2 1.2 Propriété fondamentale : Le principe de récurrence.................
Axiomatique de N, construction de Z Table des matières 1 Axiomatique de N 2 1.1 Axiomatique ordinale.................................. 2 1.2 Propriété fondamentale : Le principe de récurrence.................
FONCTIONS DE PLUSIEURS VARIABLES (Outils Mathématiques 4)
") FONCTIONS DE PLUSIEURS VARIABLES (Outils Mathématiques 4) Bernard Le Stum Université de Rennes 1 Version du 13 mars 2009 Table des matières 1 Fonctions partielles, courbes de niveau 1 2 Limites et continuité
FONCTIONS DE PLUSIEURS VARIABLES (Outils Mathématiques 4) Bernard Le Stum Université de Rennes 1 Version du 13 mars 2009 Table des matières 1 Fonctions partielles, courbes de niveau 1 2 Limites et continuité
Table des matières. I Mise à niveau 11. Préface
 Table des matières Préface v I Mise à niveau 11 1 Bases du calcul commercial 13 1.1 Alphabet grec...................................... 13 1.2 Symboles mathématiques............................... 14 1.3
Table des matières Préface v I Mise à niveau 11 1 Bases du calcul commercial 13 1.1 Alphabet grec...................................... 13 1.2 Symboles mathématiques............................... 14 1.3
Calcul matriciel. Définition 1 Une matrice de format (m,n) est un tableau rectangulaire de mn éléments, rangés en m lignes et n colonnes.
 est un tableau rectangulaire de mn éléments, rangés en m lignes et n colonnes.") 1 Définitions, notations Calcul matriciel Définition 1 Une matrice de format (m,n) est un tableau rectangulaire de mn éléments, rangés en m lignes et n colonnes. On utilise aussi la notation m n pour le
1 Définitions, notations Calcul matriciel Définition 1 Une matrice de format (m,n) est un tableau rectangulaire de mn éléments, rangés en m lignes et n colonnes. On utilise aussi la notation m n pour le
Pour l épreuve d algèbre, les calculatrices sont interdites.
 Les pages qui suivent comportent, à titre d exemples, les questions d algèbre depuis juillet 003 jusqu à juillet 015, avec leurs solutions. Pour l épreuve d algèbre, les calculatrices sont interdites.
Les pages qui suivent comportent, à titre d exemples, les questions d algèbre depuis juillet 003 jusqu à juillet 015, avec leurs solutions. Pour l épreuve d algèbre, les calculatrices sont interdites.
Filtrage stochastique non linéaire par la théorie de représentation des martingales
 Filtrage stochastique non linéaire par la théorie de représentation des martingales Adriana Climescu-Haulica Laboratoire de Modélisation et Calcul Institut d Informatique et Mathématiques Appliquées de
Filtrage stochastique non linéaire par la théorie de représentation des martingales Adriana Climescu-Haulica Laboratoire de Modélisation et Calcul Institut d Informatique et Mathématiques Appliquées de
Licence STS mention Mathématiques Parcours Ingénieur Télécom Bretagne (ITB)
") Licence STS mention Mathématiques Parcours Ingénieur Télécom Bretagne (ITB) FICHE D IDENTITE DE LA FORMATION Domaine de formation : Sciences, Technologies, Santé Intitulé : Licence Sciences, Technologies,
Licence STS mention Mathématiques Parcours Ingénieur Télécom Bretagne (ITB) FICHE D IDENTITE DE LA FORMATION Domaine de formation : Sciences, Technologies, Santé Intitulé : Licence Sciences, Technologies,
IV- Equations, inéquations dans R, Systèmes d équations
 IV- Equations, inéquations dans R, Systèmes d équations 1- Equation à une inconnue Une équation est une égalité contenant un nombre inconnu noté en général x et qui est appelé l inconnue. Résoudre l équation
IV- Equations, inéquations dans R, Systèmes d équations 1- Equation à une inconnue Une équation est une égalité contenant un nombre inconnu noté en général x et qui est appelé l inconnue. Résoudre l équation
Fonctions de plusieurs variables et applications pour l ingénieur
 Service Commun de Formation Continue Année Universitaire 2006-2007 Fonctions de plusieurs variables et applications pour l ingénieur Polycopié de cours Rédigé par Yannick Privat Bureau 321 - Institut Élie
Service Commun de Formation Continue Année Universitaire 2006-2007 Fonctions de plusieurs variables et applications pour l ingénieur Polycopié de cours Rédigé par Yannick Privat Bureau 321 - Institut Élie
Exercices - Nombres complexes : corrigé. Formes algébriques et trigonométriques, module et argument
 Formes algébriques et trigonométriques, module et argument Exercice - - L/Math Sup - On multiplie le dénominateur par sa quantité conjuguée, et on obtient : Z = 4 i 3 + i 3 i 3 = 4 i 3 + 3 = + i 3. Pour
Formes algébriques et trigonométriques, module et argument Exercice - - L/Math Sup - On multiplie le dénominateur par sa quantité conjuguée, et on obtient : Z = 4 i 3 + i 3 i 3 = 4 i 3 + 3 = + i 3. Pour
RapidMiner. Data Mining. 1 Introduction. 2 Prise en main. Master Maths Finances 2010/2011. 1.1 Présentation. 1.2 Ressources
 Master Maths Finances 2010/2011 Data Mining janvier 2011 RapidMiner 1 Introduction 1.1 Présentation RapidMiner est un logiciel open source et gratuit dédié au data mining. Il contient de nombreux outils
Master Maths Finances 2010/2011 Data Mining janvier 2011 RapidMiner 1 Introduction 1.1 Présentation RapidMiner est un logiciel open source et gratuit dédié au data mining. Il contient de nombreux outils
Optimisation Discrète
 Prof F Eisenbrand EPFL - DISOPT Optimisation Discrète Adrian Bock Semestre de printemps 2011 Série 7 7 avril 2011 Exercice 1 i Considérer le programme linéaire max{c T x : Ax b} avec c R n, A R m n et
Prof F Eisenbrand EPFL - DISOPT Optimisation Discrète Adrian Bock Semestre de printemps 2011 Série 7 7 avril 2011 Exercice 1 i Considérer le programme linéaire max{c T x : Ax b} avec c R n, A R m n et
Modèles bi-dimensionnels de coques linéairement élastiques: Estimations de l écart entre leurs solutions.
 Problèmes mathématiques de la mécanique/mathematical problems in Mechanics Modèles bi-dimensionnels de coques linéairement élastiques: Estimations de l écart entre leurs solutions. Cristinel Mardare Laboratoire
Problèmes mathématiques de la mécanique/mathematical problems in Mechanics Modèles bi-dimensionnels de coques linéairement élastiques: Estimations de l écart entre leurs solutions. Cristinel Mardare Laboratoire
Exo7. Matrice d une application linéaire. Corrections d Arnaud Bodin.
 Exo7 Matrice d une application linéaire Corrections d Arnaud odin. Exercice Soit R muni de la base canonique = ( i, j). Soit f : R R la projection sur l axe des abscisses R i parallèlement à R( i + j).
Exo7 Matrice d une application linéaire Corrections d Arnaud odin. Exercice Soit R muni de la base canonique = ( i, j). Soit f : R R la projection sur l axe des abscisses R i parallèlement à R( i + j).
ENSAE - DAKAR BROCHURE D'INFORMATION SUR LE CONCOURS DE RECRUTEMENT D ÉLÈVES INGÉNIEURS STATISTICIENS ÉCONOMISTES (I S E) Option Mathématiques CAPESA
 Option Mathématiques CAPESA") ENSEA - ABIDJAN ENSAE - DAKAR ISSEA - YAOUNDÉ BROCHURE D'INFORMATION SUR LE CONCOURS DE RECRUTEMENT D ÉLÈVES INGÉNIEURS STATISTICIENS ÉCONOMISTES (I S E) Option Mathématiques CAPESA CENTRE D APPUI AUX
ENSEA - ABIDJAN ENSAE - DAKAR ISSEA - YAOUNDÉ BROCHURE D'INFORMATION SUR LE CONCOURS DE RECRUTEMENT D ÉLÈVES INGÉNIEURS STATISTICIENS ÉCONOMISTES (I S E) Option Mathématiques CAPESA CENTRE D APPUI AUX
Chapitre 0 Introduction à la cinématique
 Chapitre 0 Introduction à la cinématique Plan Vitesse, accélération Coordonnées polaires Exercices corrigés Vitesse, Accélération La cinématique est l étude du mouvement Elle suppose donc l existence à
Chapitre 0 Introduction à la cinématique Plan Vitesse, accélération Coordonnées polaires Exercices corrigés Vitesse, Accélération La cinématique est l étude du mouvement Elle suppose donc l existence à
Calcul de développements de Puiseux et application au calcul du groupe de monodromie d'une courbe algébrique plane
 Calcul de développements de Puiseux et application au calcul du groupe de monodromie d'une courbe algébrique plane Poteaux Adrien XLIM-DMI, UMR-CNRS 6172 Université de Limoges Soutenance de thèse 15 octobre
Calcul de développements de Puiseux et application au calcul du groupe de monodromie d'une courbe algébrique plane Poteaux Adrien XLIM-DMI, UMR-CNRS 6172 Université de Limoges Soutenance de thèse 15 octobre
Introduction au maillage pour le calcul scientifique
 Introduction au maillage pour le calcul scientifique CEA DAM Île-de-France, Bruyères-le-Châtel [email protected] Présentation adaptée du tutorial de Steve Owen, Sandia National Laboratories, Albuquerque,
Introduction au maillage pour le calcul scientifique CEA DAM Île-de-France, Bruyères-le-Châtel [email protected] Présentation adaptée du tutorial de Steve Owen, Sandia National Laboratories, Albuquerque,
Table des matières. Introduction Générale 5
 Table des matières Introduction Générale 5 1 Généralités et rappels 16 1.1 Rappels... 16 1.1.1 Introduction... 16 1.1.2 Notion de stabilité...... 17 1.1.3 Stabilité globale et stabilité locale... 17 1.1.4
Table des matières Introduction Générale 5 1 Généralités et rappels 16 1.1 Rappels... 16 1.1.1 Introduction... 16 1.1.2 Notion de stabilité...... 17 1.1.3 Stabilité globale et stabilité locale... 17 1.1.4
CHAPITRE 10. Jacobien, changement de coordonnées.
 CHAPITRE 10 Jacobien, changement de coordonnées ans ce chapitre, nous allons premièrement rappeler la définition du déterminant d une matrice Nous nous limiterons au cas des matrices d ordre 2 2et3 3,
CHAPITRE 10 Jacobien, changement de coordonnées ans ce chapitre, nous allons premièrement rappeler la définition du déterminant d une matrice Nous nous limiterons au cas des matrices d ordre 2 2et3 3,
Couples de variables aléatoires discrètes
 Couples de variables aléatoires discrètes ECE Lycée Carnot mai Dans ce dernier chapitre de probabilités de l'année, nous allons introduire l'étude de couples de variables aléatoires, c'est-à-dire l'étude
Couples de variables aléatoires discrètes ECE Lycée Carnot mai Dans ce dernier chapitre de probabilités de l'année, nous allons introduire l'étude de couples de variables aléatoires, c'est-à-dire l'étude
Calcul fonctionnel holomorphe dans les algèbres de Banach
 Chapitre 7 Calcul fonctionnel holomorphe dans les algèbres de Banach L objet de ce chapitre est de définir un calcul fonctionnel holomorphe qui prolonge le calcul fonctionnel polynômial et qui respecte
Chapitre 7 Calcul fonctionnel holomorphe dans les algèbres de Banach L objet de ce chapitre est de définir un calcul fonctionnel holomorphe qui prolonge le calcul fonctionnel polynômial et qui respecte
Commun à tous les candidats
 EXERCICE 3 (9 points ) Commun à tous les candidats On s intéresse à des courbes servant de modèle à la distribution de la masse salariale d une entreprise. Les fonctions f associées définies sur l intervalle
EXERCICE 3 (9 points ) Commun à tous les candidats On s intéresse à des courbes servant de modèle à la distribution de la masse salariale d une entreprise. Les fonctions f associées définies sur l intervalle
OM 1 Outils mathématiques : fonction de plusieurs variables
 Outils mathématiques : fonction de plusieurs variables PCSI 2013 2014 Certaines partie de ce chapitre ne seront utiles qu à partir de l année prochaine, mais une grande partie nous servira dès cette année.
Outils mathématiques : fonction de plusieurs variables PCSI 2013 2014 Certaines partie de ce chapitre ne seront utiles qu à partir de l année prochaine, mais une grande partie nous servira dès cette année.
Exercices - Polynômes : corrigé. Opérations sur les polynômes
 Opérations sur les polynômes Exercice 1 - Carré - L1/Math Sup - Si P = Q est le carré d un polynôme, alors Q est nécessairement de degré, et son coefficient dominant est égal à 1. On peut donc écrire Q(X)
Opérations sur les polynômes Exercice 1 - Carré - L1/Math Sup - Si P = Q est le carré d un polynôme, alors Q est nécessairement de degré, et son coefficient dominant est égal à 1. On peut donc écrire Q(X)
C f tracée ci- contre est la représentation graphique d une
 TLES1 DEVOIR A LA MAISON N 7 La courbe C f tracée ci- contre est la représentation graphique d une fonction f définie et dérivable sur R. On note f ' la fonction dérivée de f. La tangente T à la courbe
TLES1 DEVOIR A LA MAISON N 7 La courbe C f tracée ci- contre est la représentation graphique d une fonction f définie et dérivable sur R. On note f ' la fonction dérivée de f. La tangente T à la courbe
Angles orientés et trigonométrie
 Chapitre Angles orientés et trigonométrie Ce que dit le programme : CONTENUS CAPACITÉS ATTENDUES COMMENTAIRES Trigonométrie Cercle trigonométrique. Radian. Mesure d un angle orienté, mesure principale.
Chapitre Angles orientés et trigonométrie Ce que dit le programme : CONTENUS CAPACITÉS ATTENDUES COMMENTAIRES Trigonométrie Cercle trigonométrique. Radian. Mesure d un angle orienté, mesure principale.
Programme de la classe de première année MPSI
 Objectifs Programme de la classe de première année MPSI I - Introduction à l analyse L objectif de cette partie est d amener les étudiants vers des problèmes effectifs d analyse élémentaire, d introduire
Objectifs Programme de la classe de première année MPSI I - Introduction à l analyse L objectif de cette partie est d amener les étudiants vers des problèmes effectifs d analyse élémentaire, d introduire
Chapitre 1 Régime transitoire dans les systèmes physiques
 Chapitre 1 Régime transitoire dans les systèmes physiques Savoir-faire théoriques (T) : Écrire l équation différentielle associée à un système physique ; Faire apparaître la constante de temps ; Tracer
Chapitre 1 Régime transitoire dans les systèmes physiques Savoir-faire théoriques (T) : Écrire l équation différentielle associée à un système physique ; Faire apparaître la constante de temps ; Tracer
Yves Debard. Université du Mans Master Modélisation Numérique et Réalité Virtuelle. http://iut.univ-lemans.fr/ydlogi/index.html
 Méthode des éléments finis : élasticité à une dimension Yves Debard Université du Mans Master Modélisation Numérique et Réalité Virtuelle http://iut.univ-lemans.fr/ydlogi/index.html 4 mars 6 9 mars 11
Méthode des éléments finis : élasticité à une dimension Yves Debard Université du Mans Master Modélisation Numérique et Réalité Virtuelle http://iut.univ-lemans.fr/ydlogi/index.html 4 mars 6 9 mars 11
4. NOMBRES COMPLEXES ET TRIGONOMÉTRIE
 4. NOMBRES COMPLEXES ET TRIGONOMÉTRIE 1 Introduction. 1. 1 Justication historique. La résolution de l'équation du degré (par la méthode de Cardan) amena les mathématiciens italiens du seizième 3ème siècle
4. NOMBRES COMPLEXES ET TRIGONOMÉTRIE 1 Introduction. 1. 1 Justication historique. La résolution de l'équation du degré (par la méthode de Cardan) amena les mathématiciens italiens du seizième 3ème siècle
Sujet 1 : Diagnostique du Syndrome de l apnée du sommeil par des techniques d analyse discriminante.
 Sujet 1 : Diagnostique du Syndrome de l apnée du sommeil par des techniques d analyse discriminante. Objectifs et formulation du sujet Le syndrome de l apnée du sommeil (SAS) est un problème de santé publique
Sujet 1 : Diagnostique du Syndrome de l apnée du sommeil par des techniques d analyse discriminante. Objectifs et formulation du sujet Le syndrome de l apnée du sommeil (SAS) est un problème de santé publique
Algorithmes d'apprentissage
 Algorithmes d'apprentissage 1 Agents qui apprennent à partir d'exemples La problématique : prise de décision automatisée à partir d'un ensemble d'exemples Diagnostic médical Réponse à une demande de prêt
Algorithmes d'apprentissage 1 Agents qui apprennent à partir d'exemples La problématique : prise de décision automatisée à partir d'un ensemble d'exemples Diagnostic médical Réponse à une demande de prêt
BACCALAUREAT GENERAL MATHÉMATIQUES
 BACCALAUREAT GENERAL FEVRIER 2014 MATHÉMATIQUES SERIE : ES Durée de l épreuve : 3 heures Coefficient : 5 (ES), 4 (L) 7(spe ES) Les calculatrices électroniques de poche sont autorisées, conformement à la
BACCALAUREAT GENERAL FEVRIER 2014 MATHÉMATIQUES SERIE : ES Durée de l épreuve : 3 heures Coefficient : 5 (ES), 4 (L) 7(spe ES) Les calculatrices électroniques de poche sont autorisées, conformement à la