Traitement d images 4 ème partie : traiter 2 images
|
|
|
- Anaïs St-Jacques
- il y a 9 ans
- Total affichages :
Transcription
1 Traitement d images 4 ème partie : traiter 2 images Caroline Petitjean Plan Applications, perception, représentation Prétraitements Amélioration Restauration Traitement : Segmentation Traitement de 2 images 1

2 Traiter 2 images : pourquoi? Recaler, fusionner, comparer des images médicales Animation : morphing Séquences vidéo : mouvement Traiter 2 images : plan Recalage & fusion d images (médicales) Image registration Estimation de mouvement Motion estimation 2
 Image registration")
3 1) Intra-patient, mono-modalit modalité Exemple : évolution de lésions (images IRM d un patient atteint de sclérose en plaque à quelques mois d intervalle) Source Recalage et fusion Cible Source : Université Louis Pasteur, Strasbourg Recalage et fusion 1) Intra-patient, mono-modalit modalité Exemple : évolution de lésions (images IRM d un patient atteint de sclérose en plaque à quelques mois d intervalle) Différence Source Cible Source recalée finale Source : Université Louis Pasteur, Strasbourg 3

4 Recalage et fusion 2) Intra-patient, multi-modalit modalité Exemple : fusion d informations provenant de 2 modalités différentes Source (scanner) Source : EPFL Cible (TEP) Recalage et fusion 2) Intra-patient, multi-modalit modalité Exemple : fusion d informations provenant de 2 modalités différentes Source (scanner) Cible (TEP) Source recalée Source : EPFL 4

5 Recalage et fusion 2) Intra-patient, multi-modalit modalité Exemple : fusion d informations provenant de 2 modalités différentes Source (IRM) Source : Université de Hambourg Cible (scanner) Recalage et fusion 2) Intra-patient, multi-modalit modalité Exemple : fusion d informations provenant de 2 modalités différentes Source (IRM) Cible (scanner) Source recalée Source : Université de Hambourg 5

6 Recalage et fusion 3) Inter-patient, intra-modalit modalité Exemple : Segmentation à partir d un atlas anatomique Source (individu) Cible (atlas) Source recalée Source : INRIA Recalage et fusion 3) Inter-patient, intra-modalit modalité Exemple : Segmentation à partir d un atlas anatomique Source (individu) Cible (atlas) Source recalée Atlas segmenté et étiqueté Source : INRIA 6

7 Recalage et fusion 3) Inter-patient, intra-modalit modalité Exemple : Segmentation à partir d un atlas anatomique Source (individu) Cible (atlas) Source recalée Atlas segmenté et étiqueté Source : INRIA Recalage et fusion Logiciel Voxel-MAN (Université de Hambourg) 7

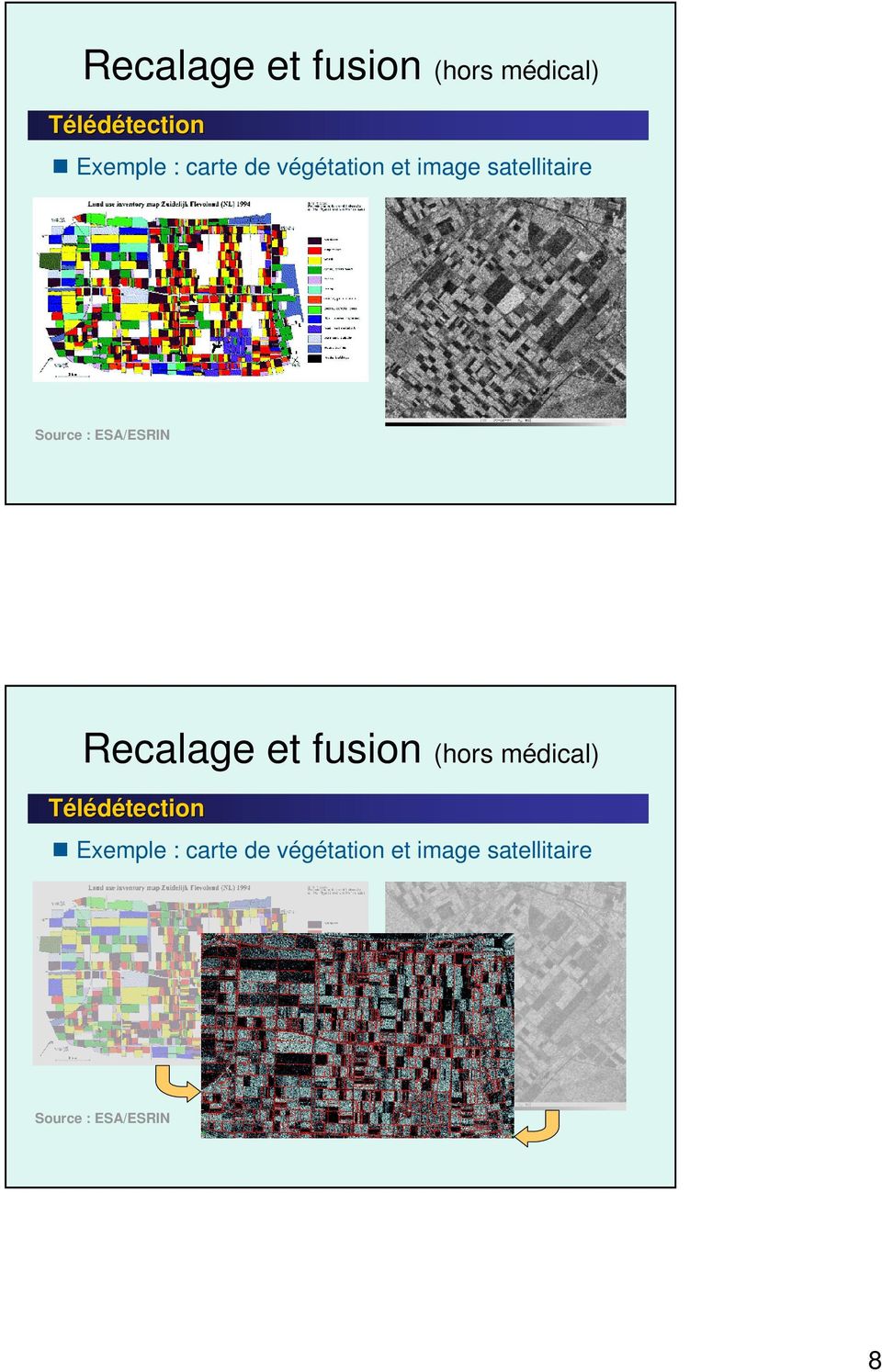
8 Recalage et fusion (hors médical) Télédétection Exemple : carte de végétation et image satellitaire Source : ESA/ESRIN Recalage et fusion (hors médical) Télédétection Exemple : carte de végétation et image satellitaire Source : ESA/ESRIN 8
9 Recalage Trouver une transformation spatiale entre 2 images Recalage Trouver une transformation spatiale entre 2 images 9

10 Recalage Quels repères mettre en correspondance? Points particuliers Tous les pixels de l image? Quelle transformation géométrique? Rigide Non-rigide Points pour la correspondance Primitives intrinsèques Déjà présentes dans l image Primitives extrinsèques Créées artificiellement 10

11 Primitives extrinsèques Repères externes, visibles dans les 2 modalités fixées au patient ou à la table d examen Invasifs (Vis dans la boîte crânienne) Non invasifs Cadre non vissé Moule Repères collés à la peau Primitives extrinsèques Repères externes, contention 11

12 Primitives extrinsèques Avantages Permet de recaler des données très différentes Inconvénients Les marqueurs doivent être positionnés avant l acquisition Primitives intrinsèques Structures intrinsèques au patient information pertinente présente dans les 2 jeux de données peuvent être : Points Courbes (contours) Surfaces segmentées Volumes Points anatomiques identifiés manuellement par l opérateur Points géométriques isolés automatiquement 12

13 Exemple du morphing Mise en correspondance de vecteurs Une des 1ères utilisations : dans le clip de M. Jackson (1991) Black or white Primitives intrinsèques Mise en correspondance de courbes ou surfaces Principalement en recalage d images cérébrales Courbes : lieux de courbure maximale (lignes de crête) Surfaces : segmentation par modèles déformables Source : INRIA 13

14 Différents types de transformations Rigides : Translations rotations Conservation des angles et des distances + pour recalage intra-patient / intra modalité Original Transformation globale Différents types de transformations Transformations élastiques Bien quand le avant/après ne sont pas similaires! (ex : apparition/disparition de tumeur) Original Transformation globale 14

15 Traiter 2 images : plan Recalage & fusion d images (médicales) Estimation de mouvement Estimation de mouvement 15

16 Différence d images pour l estimation du mouvement Estimation de mouvement Différence : Bien pour savoir s il y a du mouvement Ne permet pas d analyser le mouvement Dans la suite on voit une technique pour obtenir le champ de vecteurs : le flot optique - optical flow 16

17 En chaque pixel, un vecteur (ux, uy) Comment faire pour obtenir ce «champ» de vecteurs? Vector field Perception du mouvement (1) 17

 Aucun mouvement apparent n est perçu")
18 Perception du mouvement (1) Le mouvement apparent est perpendiculaire au gradient, mais n est pas conforme au mouvement réel Perception du mouvement (2) Aucun mouvement apparent n est perçu 18
 Aucun mouvement apparent n est")
19 Estimation de mouvement Comment estimer le mouvement du rectangle vert? Estimation de mouvement Comment estimer le mouvement du rectangle vert? On ne peut pas l estimer, le problème est indéterminé (problème d ouverture) 19
 19")
20 Estimation de mouvement Comment estimer le mouvement du rectangle vert? Estimation de mouvement Comment estimer le mouvement du rectangle vert? On peut l estimer! 20

21 Estimation de mouvement On peut estimer le mouvement du rectangle vert qui est perpendiculaire aux contours (gradient) de l image Estimation de mouvement I ( t, x( t)) = cste 21
22 Estimation de mouvement Hypothèse de départ du flot optique : l intensité de l image reste constante au cours du temps di ( t, x( t)) I ( t, x( t)) = cste = 0 dt Position du mouvement à mesurer Estimation de mouvement Hypothèse de départ : l intensité de l image reste constante au cours du temps Vitesse du mouvement à mesurer di ( t, x( t)) I dx I ( t, x( t)) = cste = 0 + I. = 0 dt t dt I I di di + I. u = 0 + ux + u y = 0 t t dx dy On ne peut estimer que le mouvement perpendiculaire au gradient 1 équation à 2 inconnues (u x, u y ) : problème indéterminé 22
23 Estimation de mouvement On a donc 1 équation à deux inconnues Cf. Illusion de Barber Pole : ui x + vi y + It = 0 Source images : wikipedia Quel est le mouvement réel? Il faut AJOUTER une CONTRAINTE Estimation de mouvement Ajout de contraintes Hypothèse 1 : champ de mouvement d une petite partie de l image est constant (Lucas- Kanade) Hypothèse 2 : le champ de mouvement doit être «lisse» (Horn & Schunk) Permet d ajouter des équations 23

24 Applications Estimation des déformations d myocardiques Estimation de la déformation entre chaque image Obtention d un champ de déformation Applications Estimation des déformations d myocardiques Contraction dans la direction radiale Mouvement entre chaque image Contraction dans la direction tangentielle 24
25 Références Image Morphing, Thin-Plate Spline Model, CSE399b, Spring 06, Computer Vision, Lecture 8 Cours Morphing, Daniel Cohen-Or, Université de Tel Aviv Thèse CP Estimation du mouvement, Zaccharin & Hébert, 2008, wcours.gel.ulaval.ca/ 25
En vue de l'obtention du. Présentée et soutenue par Fenohery Tiana ANDRIAMANAMPISOA Le 18 Novembre 2008
 THÈSE En vue de l'obtention du DOCTORAT DE L UNIVERSITÉ DE TOULOUSE Délivré par l'université Toulouse III - Paul Sabatier Spécialité : Informatique Présentée et soutenue par Fenohery Tiana ANDRIAMANAMPISOA
THÈSE En vue de l'obtention du DOCTORAT DE L UNIVERSITÉ DE TOULOUSE Délivré par l'université Toulouse III - Paul Sabatier Spécialité : Informatique Présentée et soutenue par Fenohery Tiana ANDRIAMANAMPISOA
Projet : Recalage par maximisation de l information mutuelle
 École Polytechnique de Montréal Automne 25, 12 décembre 25 Projet : Recalage par maximisation de l information mutuelle GBM613, Application médicales de l informatique Nom Matricule Groupe Herve Lombaert
École Polytechnique de Montréal Automne 25, 12 décembre 25 Projet : Recalage par maximisation de l information mutuelle GBM613, Application médicales de l informatique Nom Matricule Groupe Herve Lombaert
Analyse de la vidéo. Chapitre 4.1 - La modélisation pour le suivi d objet. 10 mars 2015. Chapitre 4.1 - La modélisation d objet 1 / 57
 Analyse de la vidéo Chapitre 4.1 - La modélisation pour le suivi d objet 10 mars 2015 Chapitre 4.1 - La modélisation d objet 1 / 57 La représentation d objets Plan de la présentation 1 La représentation
Analyse de la vidéo Chapitre 4.1 - La modélisation pour le suivi d objet 10 mars 2015 Chapitre 4.1 - La modélisation d objet 1 / 57 La représentation d objets Plan de la présentation 1 La représentation
Chapitre 2 : Caractéristiques du mouvement d un solide
 Chapitre 2 : Caractéristiques du mouvement d un solide I Rappels : Référentiel : Le mouvement d un corps est décris par rapport à un corps de référence et dépend du choix de ce corps. Ce corps de référence
Chapitre 2 : Caractéristiques du mouvement d un solide I Rappels : Référentiel : Le mouvement d un corps est décris par rapport à un corps de référence et dépend du choix de ce corps. Ce corps de référence
Fonctions de deux variables. Mai 2011
 Fonctions de deux variables Dédou Mai 2011 D une à deux variables Les fonctions modèlisent de l information dépendant d un paramètre. On a aussi besoin de modéliser de l information dépendant de plusieurs
Fonctions de deux variables Dédou Mai 2011 D une à deux variables Les fonctions modèlisent de l information dépendant d un paramètre. On a aussi besoin de modéliser de l information dépendant de plusieurs
Cours de Mécanique du point matériel
 Cours de Mécanique du point matériel SMPC1 Module 1 : Mécanique 1 Session : Automne 2014 Prof. M. EL BAZ Cours de Mécanique du Point matériel Chapitre 1 : Complément Mathématique SMPC1 Chapitre 1: Rappels
Cours de Mécanique du point matériel SMPC1 Module 1 : Mécanique 1 Session : Automne 2014 Prof. M. EL BAZ Cours de Mécanique du Point matériel Chapitre 1 : Complément Mathématique SMPC1 Chapitre 1: Rappels
Les sciences de l ingénieur appliquées à la prise en charge du
 Les sciences de l ingénieur appliquées à la prise en charge du cancer : enjeux et opportunités Début de cartographie des enjeux cliniques et technologiques gq Jean-François MENUDET, Cluster I-Care Cartographie
Les sciences de l ingénieur appliquées à la prise en charge du cancer : enjeux et opportunités Début de cartographie des enjeux cliniques et technologiques gq Jean-François MENUDET, Cluster I-Care Cartographie
Comparaison de Relevés 3D issus de plusieurs Systèmes de Numérisation
 Laboratoire Vision & Robotique Comparaison de Relevés 3D issus de plusieurs Systèmes de Numérisation Emilie KOENIG, Benjamin ALBOUY, Sylvie TREUILLET, Yves Lucas Contact : Sylvie Treuillet Polytech'Orléans
Laboratoire Vision & Robotique Comparaison de Relevés 3D issus de plusieurs Systèmes de Numérisation Emilie KOENIG, Benjamin ALBOUY, Sylvie TREUILLET, Yves Lucas Contact : Sylvie Treuillet Polytech'Orléans
Fonctions de plusieurs variables
 Maths MP Exercices Fonctions de plusieurs variables Les indications ne sont ici que pour être consultées après le T (pour les exercices non traités). Avant et pendant le T, tenez bon et n allez pas les
Maths MP Exercices Fonctions de plusieurs variables Les indications ne sont ici que pour être consultées après le T (pour les exercices non traités). Avant et pendant le T, tenez bon et n allez pas les
Vision industrielle et télédétection - Détection d ellipses. Guillaume Martinez 17 décembre 2007
 Vision industrielle et télédétection - Détection d ellipses Guillaume Martinez 17 décembre 2007 1 Table des matières 1 Le projet 3 1.1 Objectif................................ 3 1.2 Les choix techniques.........................
Vision industrielle et télédétection - Détection d ellipses Guillaume Martinez 17 décembre 2007 1 Table des matières 1 Le projet 3 1.1 Objectif................................ 3 1.2 Les choix techniques.........................
Repérage d un point - Vitesse et
 PSI - écanique I - Repérage d un point - Vitesse et accélération page 1/6 Repérage d un point - Vitesse et accélération Table des matières 1 Espace et temps - Référentiel d observation 1 2 Coordonnées
PSI - écanique I - Repérage d un point - Vitesse et accélération page 1/6 Repérage d un point - Vitesse et accélération Table des matières 1 Espace et temps - Référentiel d observation 1 2 Coordonnées
Une technologie ludique
 Une technologie ludique Rémi stavrakas, Patricia chabert [1] C est à partir d un support bien connu de nos élèves, la manette de la Wii, la console de jeu de Nintendo, qu une équipe pédagogique de l académie
Une technologie ludique Rémi stavrakas, Patricia chabert [1] C est à partir d un support bien connu de nos élèves, la manette de la Wii, la console de jeu de Nintendo, qu une équipe pédagogique de l académie
DURÉE DU JOUR EN FONCTION DE LA DATE ET DE LA LATITUDE
 DURÉE DU JUR E FCTI DE LA DATE ET DE LA LATITUDE ous allons nous intéresser à la durée du jour, prise ici dans le sens de période d éclairement par le Soleil dans une journée de 4 h, en un lieu donné de
DURÉE DU JUR E FCTI DE LA DATE ET DE LA LATITUDE ous allons nous intéresser à la durée du jour, prise ici dans le sens de période d éclairement par le Soleil dans une journée de 4 h, en un lieu donné de
TSTI 2D CH X : Exemples de lois à densité 1
 TSTI 2D CH X : Exemples de lois à densité I Loi uniforme sur ab ; ) Introduction Dans cette activité, on s intéresse à la modélisation du tirage au hasard d un nombre réel de l intervalle [0 ;], chacun
TSTI 2D CH X : Exemples de lois à densité I Loi uniforme sur ab ; ) Introduction Dans cette activité, on s intéresse à la modélisation du tirage au hasard d un nombre réel de l intervalle [0 ;], chacun
Notes du cours MTH1101 Calcul I Partie II: fonctions de plusieurs variables
 Notes du cours MTH1101 Calcul I Partie II: fonctions de plusieurs variables Guy Desaulniers Département de mathématiques et de génie industriel École Polytechnique de Montréal Automne 2014 Table des matières
Notes du cours MTH1101 Calcul I Partie II: fonctions de plusieurs variables Guy Desaulniers Département de mathématiques et de génie industriel École Polytechnique de Montréal Automne 2014 Table des matières
TP 7 : oscillateur de torsion
 TP 7 : oscillateur de torsion Objectif : étude des oscillations libres et forcées d un pendule de torsion 1 Principe général 1.1 Définition Un pendule de torsion est constitué par un fil large (métallique)
TP 7 : oscillateur de torsion Objectif : étude des oscillations libres et forcées d un pendule de torsion 1 Principe général 1.1 Définition Un pendule de torsion est constitué par un fil large (métallique)
Programme scientifique Majeure INTELLIGENCE NUMERIQUE. Mentions Image et Réalité Virtuelle Intelligence Artificielle et Robotique
 É C O L E D I N G É N I E U R D E S T E C H N O L O G I E S D E L I N F O R M A T I O N E T D E L A C O M M U N I C A T I O N Programme scientifique Majeure INTELLIGENCE NUMERIQUE Langage Java Mentions
É C O L E D I N G É N I E U R D E S T E C H N O L O G I E S D E L I N F O R M A T I O N E T D E L A C O M M U N I C A T I O N Programme scientifique Majeure INTELLIGENCE NUMERIQUE Langage Java Mentions
Chafa Azzedine - Faculté de Physique U.S.T.H.B 1
 Chafa Azzedine - Faculté de Physique U.S.T.H.B 1 Définition: La cinématique est une branche de la mécanique qui étudie les mouements des corps dans l espace en fonction du temps indépendamment des causes
Chafa Azzedine - Faculté de Physique U.S.T.H.B 1 Définition: La cinématique est une branche de la mécanique qui étudie les mouements des corps dans l espace en fonction du temps indépendamment des causes
Si un quadrilatère a. Si un quadrilatère a. Si un quadrilatère a. Si un quadrilatère a. ses côtés opposés. ses côtés opposés de. deux côtés opposés
 P1 P2 P3 P4 a a a a ses côtés opposés ses côtés opposés de deux côtés opposés ses diagonales qui se parallèles, alors c est même longueur alors parallèles et de même coupent en leur un c est un longueur
P1 P2 P3 P4 a a a a ses côtés opposés ses côtés opposés de deux côtés opposés ses diagonales qui se parallèles, alors c est même longueur alors parallèles et de même coupent en leur un c est un longueur
RIE LE RENDU THEO. 2 e trim ÉTAPE DE FINITION BOÎTE DE DIALOGUE. remarques
 THEO RIE LE RENDU 2 e trim JANVIER 2008 remarques ÉTAPE DE FINITION Le rendu est la partie finale de notre création, à ce moment on décide que notre 3D est finie et l on en réalise une image 2D Cette image
THEO RIE LE RENDU 2 e trim JANVIER 2008 remarques ÉTAPE DE FINITION Le rendu est la partie finale de notre création, à ce moment on décide que notre 3D est finie et l on en réalise une image 2D Cette image
Commun à tous les candidats
 EXERCICE 3 (9 points ) Commun à tous les candidats On s intéresse à des courbes servant de modèle à la distribution de la masse salariale d une entreprise. Les fonctions f associées définies sur l intervalle
EXERCICE 3 (9 points ) Commun à tous les candidats On s intéresse à des courbes servant de modèle à la distribution de la masse salariale d une entreprise. Les fonctions f associées définies sur l intervalle
Chapitre 0 Introduction à la cinématique
 Chapitre 0 Introduction à la cinématique Plan Vitesse, accélération Coordonnées polaires Exercices corrigés Vitesse, Accélération La cinématique est l étude du mouvement Elle suppose donc l existence à
Chapitre 0 Introduction à la cinématique Plan Vitesse, accélération Coordonnées polaires Exercices corrigés Vitesse, Accélération La cinématique est l étude du mouvement Elle suppose donc l existence à
Plan du cours : électricité 1
 Semestre : S2 Module Physique II 1 Electricité 1 2 Optique géométrique Plan du cours : électricité 1 Partie A : Electrostatique (discipline de l étude des phénomènes liés aux distributions de charges stationnaires)
Semestre : S2 Module Physique II 1 Electricité 1 2 Optique géométrique Plan du cours : électricité 1 Partie A : Electrostatique (discipline de l étude des phénomènes liés aux distributions de charges stationnaires)
Corrigé du baccalauréat S Pondichéry 12 avril 2007
 Corrigé du baccalauréat S Pondichéry 1 avril 7 EXERCICE 1 Commun à tous les candidats 4 points 1 a Les vecteurs AB et AC ont pour coordonnées AB ; ; ) et AC 1 ; 4 ; 1) Ils ne sont manifestement pas colinéaires
Corrigé du baccalauréat S Pondichéry 1 avril 7 EXERCICE 1 Commun à tous les candidats 4 points 1 a Les vecteurs AB et AC ont pour coordonnées AB ; ; ) et AC 1 ; 4 ; 1) Ils ne sont manifestement pas colinéaires
Les correcteurs accorderont une importance particulière à la rigueur des raisonnements et aux représentations graphiques demandées.
 Les correcteurs accorderont une importance particulière à la rigueur des raisonnements et aux représentations graphiques demandées. 1 Ce sujet aborde le phénomène d instabilité dans des systèmes dynamiques
Les correcteurs accorderont une importance particulière à la rigueur des raisonnements et aux représentations graphiques demandées. 1 Ce sujet aborde le phénomène d instabilité dans des systèmes dynamiques
Le droit à l image???
 Le droit à l image??? Dans ma propre philosophie, je peux parler de DROIT sans évoquer les DEVOIRS.. Vous me permettrez donc de vous en entretenir de prime abord avec cependant les nuances suivantes: Le
Le droit à l image??? Dans ma propre philosophie, je peux parler de DROIT sans évoquer les DEVOIRS.. Vous me permettrez donc de vous en entretenir de prime abord avec cependant les nuances suivantes: Le
Cours d Analyse. Fonctions de plusieurs variables
 Cours d Analyse Fonctions de plusieurs variables Licence 1ère année 2007/2008 Nicolas Prioux Université de Marne-la-Vallée Table des matières 1 Notions de géométrie dans l espace et fonctions à deux variables........
Cours d Analyse Fonctions de plusieurs variables Licence 1ère année 2007/2008 Nicolas Prioux Université de Marne-la-Vallée Table des matières 1 Notions de géométrie dans l espace et fonctions à deux variables........
Statistiques Descriptives à une dimension
 I. Introduction et Définitions 1. Introduction La statistique est une science qui a pour objectif de recueillir et de traiter les informations, souvent en très grand nombre. Elle regroupe l ensemble des
I. Introduction et Définitions 1. Introduction La statistique est une science qui a pour objectif de recueillir et de traiter les informations, souvent en très grand nombre. Elle regroupe l ensemble des
Correction du Baccalauréat S Amérique du Nord mai 2007
 Correction du Baccalauréat S Amérique du Nord mai 7 EXERCICE points. Le plan (P) a une pour équation cartésienne : x+y z+ =. Les coordonnées de H vérifient cette équation donc H appartient à (P) et A n
Correction du Baccalauréat S Amérique du Nord mai 7 EXERCICE points. Le plan (P) a une pour équation cartésienne : x+y z+ =. Les coordonnées de H vérifient cette équation donc H appartient à (P) et A n
Sillage Météo. Notion de sillage
 Sillage Météo Les représentations météorologiques sous forme d animation satellites image par image sont intéressantes. Il est dommage que les données ainsi visualisées ne soient pas utilisées pour une
Sillage Météo Les représentations météorologiques sous forme d animation satellites image par image sont intéressantes. Il est dommage que les données ainsi visualisées ne soient pas utilisées pour une
R-ICP : une nouvelle approche d appariement 3D orientée régions pour la reconnaissance faciale
 R-ICP : une nouvelle approche d appariement 3D orientée régions pour la reconnaissance faciale Boulbaba BEN AMOR, Karima OUJI, Mohsen ARDABILIAN, et Liming CHEN Laboratoire d InfoRmatique en Images et
R-ICP : une nouvelle approche d appariement 3D orientée régions pour la reconnaissance faciale Boulbaba BEN AMOR, Karima OUJI, Mohsen ARDABILIAN, et Liming CHEN Laboratoire d InfoRmatique en Images et
Sujet proposé par Yves M. LEROY. Cet examen se compose d un exercice et de deux problèmes. Ces trois parties sont indépendantes.
 Promotion X 004 COURS D ANALYSE DES STRUCTURES MÉCANIQUES PAR LA MÉTHODE DES ELEMENTS FINIS (MEC 568) contrôle non classant (7 mars 007, heures) Documents autorisés : polycopié ; documents et notes de
Promotion X 004 COURS D ANALYSE DES STRUCTURES MÉCANIQUES PAR LA MÉTHODE DES ELEMENTS FINIS (MEC 568) contrôle non classant (7 mars 007, heures) Documents autorisés : polycopié ; documents et notes de
Chapitre 9 : Applications des lois de Newton et Kepler à l'étude du mouvement des planètes et des satellites
 I- Les trois lois de Kepler : Chapitre 9 : Applications des lois de Newton et Kepler à l'étude du mouvement des planètes et des satellites Les lois de Kepler s'applique aussi bien pour une planète en mouvement
I- Les trois lois de Kepler : Chapitre 9 : Applications des lois de Newton et Kepler à l'étude du mouvement des planètes et des satellites Les lois de Kepler s'applique aussi bien pour une planète en mouvement
 Utilisation d informations visuelles dynamiques en asservissement visuel Armel Crétual IRISA, projet TEMIS puis VISTA L asservissement visuel géométrique Principe : Réalisation d une tâche robotique par
Utilisation d informations visuelles dynamiques en asservissement visuel Armel Crétual IRISA, projet TEMIS puis VISTA L asservissement visuel géométrique Principe : Réalisation d une tâche robotique par
1 radian. De même, la longueur d un arc de cercle de rayon R et dont l angle au centre a pour mesure α radians est α R. R AB =R.
 Angles orientés Trigonométrie I. Préliminaires. Le radian Définition B R AB =R C O radian R A Soit C un cercle de centre O. Dire que l angle géométrique AOB a pour mesure radian signifie que la longueur
Angles orientés Trigonométrie I. Préliminaires. Le radian Définition B R AB =R C O radian R A Soit C un cercle de centre O. Dire que l angle géométrique AOB a pour mesure radian signifie que la longueur
Les algorithmes de base du graphisme
 Les algorithmes de base du graphisme Table des matières 1 Traçage 2 1.1 Segments de droites......................... 2 1.1.1 Algorithmes simples.................... 3 1.1.2 Algorithmes de Bresenham (1965).............
Les algorithmes de base du graphisme Table des matières 1 Traçage 2 1.1 Segments de droites......................... 2 1.1.1 Algorithmes simples.................... 3 1.1.2 Algorithmes de Bresenham (1965).............
Développement d un module de recalage d images médicales. Rapport Stage Master 2 Technologie pour la médecine
 Développement d un module de recalage d images médicales Rapport Stage Master 2 Technologie pour la médecine Tuteur de stage : Simone Hemm Jury : Laurent Sarry et Jean Marie Favreau Fachhoschule Nordwestschweiz
Développement d un module de recalage d images médicales Rapport Stage Master 2 Technologie pour la médecine Tuteur de stage : Simone Hemm Jury : Laurent Sarry et Jean Marie Favreau Fachhoschule Nordwestschweiz
Simulation d'un examen anthropomorphique en imagerie TEMP à l iode 131 par simulation Monte Carlo GATE
 Simulation d'un examen anthropomorphique en imagerie TEMP à l iode 131 par simulation Monte Carlo GATE LAURENT Rémy [email protected] http://clrpcsv.in2p3.fr Journées des LARD Septembre 2007 M2R
Simulation d'un examen anthropomorphique en imagerie TEMP à l iode 131 par simulation Monte Carlo GATE LAURENT Rémy [email protected] http://clrpcsv.in2p3.fr Journées des LARD Septembre 2007 M2R
Intégrales doubles et triples - M
 Intégrales s et - [email protected] 1/27 - Intégrales (rappel) Rappels Approximation éfinition : Intégrale définie Soit f définie continue sur I = [a, b] telle que f (x) > 3 2.5 2 1.5 1.5.5 1 1.5
Intégrales s et - [email protected] 1/27 - Intégrales (rappel) Rappels Approximation éfinition : Intégrale définie Soit f définie continue sur I = [a, b] telle que f (x) > 3 2.5 2 1.5 1.5.5 1 1.5
PHY2723 Hiver 2015. Champs magnétiques statiques. [email protected]. Notes partielles accompagnant le cours.
 PHY2723 Hiver 2015 Champs magnétiques statiques [email protected] otes partielles accompagnant le cours. Champs magnétiques statiques (Chapitre 5) Charges électriques statiques ρ v créent champ électrique
PHY2723 Hiver 2015 Champs magnétiques statiques [email protected] otes partielles accompagnant le cours. Champs magnétiques statiques (Chapitre 5) Charges électriques statiques ρ v créent champ électrique
Développement d'une nouvelle interface utilisateur multi-modalité en scanner interventionnel
 Développement d'une nouvelle interface utilisateur multi-modalité en scanner interventionnel E. de Kerviler, C. de Bazelaire, P. Coulon*, S. Gotman**, J Yanof***, C. Bauer***J. Sapir**. Service de Radiologie,
Développement d'une nouvelle interface utilisateur multi-modalité en scanner interventionnel E. de Kerviler, C. de Bazelaire, P. Coulon*, S. Gotman**, J Yanof***, C. Bauer***J. Sapir**. Service de Radiologie,
Opérations de base sur ImageJ
 Opérations de base sur ImageJ TPs d hydrodynamique de l ESPCI, J. Bico, M. Reyssat, M. Fermigier ImageJ est un logiciel libre, qui fonctionne aussi bien sous plate-forme Windows, Mac ou Linux. Initialement
Opérations de base sur ImageJ TPs d hydrodynamique de l ESPCI, J. Bico, M. Reyssat, M. Fermigier ImageJ est un logiciel libre, qui fonctionne aussi bien sous plate-forme Windows, Mac ou Linux. Initialement
Corrigé du baccalauréat S Asie 21 juin 2010
 Corrigé du baccalauréat S Asie juin 00 EXERCICE Commun à tous les candidats 4 points. Question : Le triangle GBI est : Réponse a : isocèle. Réponse b : équilatéral. Réponse c : rectangle. On a GB = + =
Corrigé du baccalauréat S Asie juin 00 EXERCICE Commun à tous les candidats 4 points. Question : Le triangle GBI est : Réponse a : isocèle. Réponse b : équilatéral. Réponse c : rectangle. On a GB = + =
Loi binomiale Lois normales
 Loi binomiale Lois normales Christophe ROSSIGNOL Année scolaire 204/205 Table des matières Rappels sur la loi binomiale 2. Loi de Bernoulli............................................ 2.2 Schéma de Bernoulli
Loi binomiale Lois normales Christophe ROSSIGNOL Année scolaire 204/205 Table des matières Rappels sur la loi binomiale 2. Loi de Bernoulli............................................ 2.2 Schéma de Bernoulli
Institut Informatique de gestion. Communication en situation de crise
 Institut Informatique de gestion Communication en situation de crise 1 Contexte Je ne suis pas un professionnel de la communication Méthode empirique, basée sur l(es) expérience(s) Je suis actif dans un
Institut Informatique de gestion Communication en situation de crise 1 Contexte Je ne suis pas un professionnel de la communication Méthode empirique, basée sur l(es) expérience(s) Je suis actif dans un
T.P. FLUENT. Cours Mécanique des Fluides. 24 février 2006 NAZIH MARZOUQY
 T.P. FLUENT Cours Mécanique des Fluides 24 février 2006 NAZIH MARZOUQY 2 Table des matières 1 Choc stationnaire dans un tube à choc 7 1.1 Introduction....................................... 7 1.2 Description.......................................
T.P. FLUENT Cours Mécanique des Fluides 24 février 2006 NAZIH MARZOUQY 2 Table des matières 1 Choc stationnaire dans un tube à choc 7 1.1 Introduction....................................... 7 1.2 Description.......................................
Ensemble léger de prise de photo sous UV-A Tam Photo Kit n 1 pour appareil photo compact
 Ensemble léger de prise de photo sous UV-A Tam Photo Kit n 1 pour appareil photo compact Phone +33 (0)130 808 182 - Fax. +33 (0)130 808 199 /15 rue des Frères Lumière - ZI des Ebisoires BP136-78374 PLAISIR
Ensemble léger de prise de photo sous UV-A Tam Photo Kit n 1 pour appareil photo compact Phone +33 (0)130 808 182 - Fax. +33 (0)130 808 199 /15 rue des Frères Lumière - ZI des Ebisoires BP136-78374 PLAISIR
La visio-conférence holographique : Pourquoi? Comment?
 La visio-conférence holographique : Pourquoi? Comment? Francis Felix Labo LSIS / Arts & Métiers Paritech (ENSAM) 2 Cours des Arts et Métiers 13100 Aix-en-Provence Thierry Henocque AIP-Primeca Dauphiné
La visio-conférence holographique : Pourquoi? Comment? Francis Felix Labo LSIS / Arts & Métiers Paritech (ENSAM) 2 Cours des Arts et Métiers 13100 Aix-en-Provence Thierry Henocque AIP-Primeca Dauphiné
C est un mouvement plan dont la trajectoire est un cercle ou une portion de cercle. Le module du vecteur position OM est constant et il est égal au
 1 2 C est un mouvement plan dont la trajectoire est un cercle ou une portion de cercle. Le module du vecteur position est constant et il est égal au rayon du cercle. = 3 A- ouvement circulaire non uniforme
1 2 C est un mouvement plan dont la trajectoire est un cercle ou une portion de cercle. Le module du vecteur position est constant et il est égal au rayon du cercle. = 3 A- ouvement circulaire non uniforme
Chapitre 1 Cinématique du point matériel
 Chapitre 1 Cinématique du point matériel 7 1.1. Introduction 1.1.1. Domaine d étude Le programme de mécanique de math sup se limite à l étude de la mécanique classique. Sont exclus : la relativité et la
Chapitre 1 Cinématique du point matériel 7 1.1. Introduction 1.1.1. Domaine d étude Le programme de mécanique de math sup se limite à l étude de la mécanique classique. Sont exclus : la relativité et la
Object Removal by Exemplar-Based Inpainting
 Object Removal by Exemplar-Based Inpainting Kévin Polisano A partir d un article de A. Criminisi, P. Pérez & H. K. Toyama 14/02/2013 Kévin Polisano Object Removal by Exemplar-Based Inpainting 14/02/2013
Object Removal by Exemplar-Based Inpainting Kévin Polisano A partir d un article de A. Criminisi, P. Pérez & H. K. Toyama 14/02/2013 Kévin Polisano Object Removal by Exemplar-Based Inpainting 14/02/2013
de calibration Master 2: Calibration de modèles: présentation et simulation d
 Master 2: Calibration de modèles: présentation et simulation de quelques problèmes de calibration Plan de la présentation 1. Présentation de quelques modèles à calibrer 1a. Reconstruction d une courbe
Master 2: Calibration de modèles: présentation et simulation de quelques problèmes de calibration Plan de la présentation 1. Présentation de quelques modèles à calibrer 1a. Reconstruction d une courbe
L analyse d images regroupe plusieurs disciplines que l on classe en deux catégories :
 La vision nous permet de percevoir et d interpreter le monde qui nous entoure. La vision artificielle a pour but de reproduire certaines fonctionnalités de la vision humaine au travers de l analyse d images.
La vision nous permet de percevoir et d interpreter le monde qui nous entoure. La vision artificielle a pour but de reproduire certaines fonctionnalités de la vision humaine au travers de l analyse d images.
STENTS ET FLOW-DIVERTERS : la porosité finale peut différer de la porosité théorique
 STENTS ET FLOW-DIVERTERS : la porosité finale peut différer de la porosité théorique Bing Fabrice, Darsaut Tim, Tieu Tai, Salazkin Igor, Guylaine Gevry, Guilbert François, Roy Daniel, Weill Alain, Raymond
STENTS ET FLOW-DIVERTERS : la porosité finale peut différer de la porosité théorique Bing Fabrice, Darsaut Tim, Tieu Tai, Salazkin Igor, Guylaine Gevry, Guilbert François, Roy Daniel, Weill Alain, Raymond
Segmentation d images IRM anatomiques par inférence bayésienne multimodale et détection de lésions
 N d ordre : 5790 THÈSE présentée pour obtenir le grade de Docteur de l Université Louis Pasteur - Strasbourg I École Doctorale Discipline Spécialité : Mathématiques, Sciences de l Information et de l Ingénieur
N d ordre : 5790 THÈSE présentée pour obtenir le grade de Docteur de l Université Louis Pasteur - Strasbourg I École Doctorale Discipline Spécialité : Mathématiques, Sciences de l Information et de l Ingénieur
Préparé au Laboratoire d Analyse et d Architecture des Systèmes du CNRS
 Année 2004 THESE Préparé au Laboratoire d Analyse et d Architecture des Systèmes du CNRS En vue de l obtention du titre de Docteur de l Institut National Polytechnique de Toulouse Spécialité : Informatique
Année 2004 THESE Préparé au Laboratoire d Analyse et d Architecture des Systèmes du CNRS En vue de l obtention du titre de Docteur de l Institut National Polytechnique de Toulouse Spécialité : Informatique
Notes du cours MTH1101N Calcul I Partie II: fonctions de plusieurs variables
 Notes du cours MTH1101N Calcul I Partie II: fonctions de plusieurs variables Fausto Errico Département de mathématiques et de génie industriel École Polytechnique de Montréal Automne 2012 Table des matières
Notes du cours MTH1101N Calcul I Partie II: fonctions de plusieurs variables Fausto Errico Département de mathématiques et de génie industriel École Polytechnique de Montréal Automne 2012 Table des matières
Sujet de thèse : Suivi d objets en mouvement dans une séquence vidéo
 Université PARIS DESCARTES Centre universitaire des Saints-Pères UFR DE MATHÉMATIQUES ET INFORMATIQUE Thèse présentée pour l obtention du grade de Docteur de l université PARIS DESCARTES Spécialité : Informatique
Université PARIS DESCARTES Centre universitaire des Saints-Pères UFR DE MATHÉMATIQUES ET INFORMATIQUE Thèse présentée pour l obtention du grade de Docteur de l université PARIS DESCARTES Spécialité : Informatique
8.1 Généralités sur les fonctions de plusieurs variables réelles. f : R 2 R (x, y) 1 x 2 y 2
 1 x 2 y 2") Chapitre 8 Fonctions de plusieurs variables 8.1 Généralités sur les fonctions de plusieurs variables réelles Définition. Une fonction réelle de n variables réelles est une application d une partie de R
Chapitre 8 Fonctions de plusieurs variables 8.1 Généralités sur les fonctions de plusieurs variables réelles Définition. Une fonction réelle de n variables réelles est une application d une partie de R
Mécanique : Cinématique du point. Chapitre 1 : Position. Vitesse. Accélération
 2 e B et C 1 Position. Vitesse. Accélération 1 Mécanique : Cinéatique du point La écanique est le doaine de tout ce qui produit ou transet un ouveent, une force, une déforation : achines, oteurs, véhicules,
2 e B et C 1 Position. Vitesse. Accélération 1 Mécanique : Cinéatique du point La écanique est le doaine de tout ce qui produit ou transet un ouveent, une force, une déforation : achines, oteurs, véhicules,
LA PHYSIQUE DES MATERIAUX. Chapitre 1 LES RESEAUX DIRECT ET RECIPROQUE
 LA PHYSIQUE DES MATERIAUX Chapitre 1 LES RESEAUX DIRECT ET RECIPROQUE Pr. A. Belayachi Université Mohammed V Agdal Faculté des Sciences Rabat Département de Physique - L.P.M [email protected] 1 1.Le réseau
LA PHYSIQUE DES MATERIAUX Chapitre 1 LES RESEAUX DIRECT ET RECIPROQUE Pr. A. Belayachi Université Mohammed V Agdal Faculté des Sciences Rabat Département de Physique - L.P.M [email protected] 1 1.Le réseau
Vous devez tout d abord réaliser l esquisse (le dessin de la pièce en 2 dimensions) avant de mettre cette pièce en volume.
 avant de mettre cette pièce en volume.") Lancer le logiciel SolidWorks en double-cliquant sur l icône ci-contre. Cliquer sur «fichier», puis «nouveau» puis cliquer sur l icône ci-contre et Cliquer sur OK. Vous devez tout d abord réaliser l esquisse
Lancer le logiciel SolidWorks en double-cliquant sur l icône ci-contre. Cliquer sur «fichier», puis «nouveau» puis cliquer sur l icône ci-contre et Cliquer sur OK. Vous devez tout d abord réaliser l esquisse
J. Goupil (1), A. Fohlen (1), V. Le Pennec (1), O. Lepage (2), M. Hamon (2), M. Hamon-Kérautret (1)
, A. Fohlen (1), V. Le Pennec (1), O. Lepage (2), M. Hamon (2), M. Hamon-Kérautret (1)") J. Goupil (1), A. Fohlen (1), V. Le Pennec (1), O. Lepage (2), M. Hamon (2), M. Hamon-Kérautret (1) (1) Pôle d Imagerie, service de Radiologie, CHU Caen (2) Pôle Cardio-thoracique, service de Chirurgie
J. Goupil (1), A. Fohlen (1), V. Le Pennec (1), O. Lepage (2), M. Hamon (2), M. Hamon-Kérautret (1) (1) Pôle d Imagerie, service de Radiologie, CHU Caen (2) Pôle Cardio-thoracique, service de Chirurgie
6 Equations du première ordre
 6 Equations u première orre 6.1 Equations linéaires Consiérons l équation a k (x) k u = b(x), (6.1) où a 1,...,a n,b sont es fonctions continûment ifférentiables sur R. Soit D un ouvert e R et u : D R
6 Equations u première orre 6.1 Equations linéaires Consiérons l équation a k (x) k u = b(x), (6.1) où a 1,...,a n,b sont es fonctions continûment ifférentiables sur R. Soit D un ouvert e R et u : D R
Analyse statique d une pièce
 Analyse statique d une pièce Contrainte de Von Mises sur une chape taillée dans la masse 1 Comportement d un dynamomètre On considère le dynamomètre de forme globalement circulaire, excepté les bossages
Analyse statique d une pièce Contrainte de Von Mises sur une chape taillée dans la masse 1 Comportement d un dynamomètre On considère le dynamomètre de forme globalement circulaire, excepté les bossages
F411 - Courbes Paramétrées, Polaires
 1/43 Courbes Paramétrées Courbes polaires Longueur d un arc, Courbure F411 - Courbes Paramétrées, Polaires Michel Fournié [email protected] http://www.math.univ-toulouse.fr/ fournie/ Année 2012/2013
1/43 Courbes Paramétrées Courbes polaires Longueur d un arc, Courbure F411 - Courbes Paramétrées, Polaires Michel Fournié [email protected] http://www.math.univ-toulouse.fr/ fournie/ Année 2012/2013
Michel Henry Nicolas Delorme
 Michel Henry Nicolas Delorme Mécanique du point Cours + Exos Michel Henry Maître de conférences à l IUFM des Pays de Loire (Le Mans) Agrégé de physique Nicolas Delorme Maître de conférences à l université
Michel Henry Nicolas Delorme Mécanique du point Cours + Exos Michel Henry Maître de conférences à l IUFM des Pays de Loire (Le Mans) Agrégé de physique Nicolas Delorme Maître de conférences à l université
Méthodes de quadrature. Polytech Paris-UPMC. - p. 1/48
 Méthodes de Polytech Paris-UPMC - p. 1/48 Polynôme d interpolation de Preuve et polynôme de Calcul de l erreur d interpolation Étude de la formule d erreur Autres méthodes - p. 2/48 Polynôme d interpolation
Méthodes de Polytech Paris-UPMC - p. 1/48 Polynôme d interpolation de Preuve et polynôme de Calcul de l erreur d interpolation Étude de la formule d erreur Autres méthodes - p. 2/48 Polynôme d interpolation
3ème séance de Mécanique des fluides. Rappels sur les premières séances Aujourd hui : le modèle du fluide parfait. 2 Écoulements potentiels
 3ème séance de Mécanique des fluides Rappels sur les premières séances Aujourd hui : le modèle du fluide parfait 1 Généralités 1.1 Introduction 1.2 Équation d Euler 1.3 Premier théorème de Bernoulli 1.4
3ème séance de Mécanique des fluides Rappels sur les premières séances Aujourd hui : le modèle du fluide parfait 1 Généralités 1.1 Introduction 1.2 Équation d Euler 1.3 Premier théorème de Bernoulli 1.4
Le second nuage : questions autour de la lumière
 Le second nuage : questions autour de la lumière Quelle vitesse? infinie ou pas? cf débats autour de la réfraction (Newton : la lumière va + vite dans l eau) mesures astronomiques (Rœmer, Bradley) : grande
Le second nuage : questions autour de la lumière Quelle vitesse? infinie ou pas? cf débats autour de la réfraction (Newton : la lumière va + vite dans l eau) mesures astronomiques (Rœmer, Bradley) : grande
Projet de Traitement du Signal Segmentation d images SAR
 Projet de Traitement du Signal Segmentation d images SAR Introduction En analyse d images, la segmentation est une étape essentielle, préliminaire à des traitements de haut niveau tels que la classification,
Projet de Traitement du Signal Segmentation d images SAR Introduction En analyse d images, la segmentation est une étape essentielle, préliminaire à des traitements de haut niveau tels que la classification,
Guide pour l analyse de l existant technique. Partie 3
 Partie 3 La Liaison Pivot sur roulement : Le Composant ROULEMENT 0 Introduction Le but de ce guide est de vous permettre une meilleure rédaction des rapports de Bureaux d Études que vous aurez à nous remettre
Partie 3 La Liaison Pivot sur roulement : Le Composant ROULEMENT 0 Introduction Le but de ce guide est de vous permettre une meilleure rédaction des rapports de Bureaux d Études que vous aurez à nous remettre
La survie nette actuelle à long terme Qualités de sept méthodes d estimation
 La survie nette actuelle à long terme Qualités de sept méthodes d estimation PAR Alireza MOGHADDAM TUTEUR : Guy HÉDELIN Laboratoire d Épidémiologie et de Santé publique, EA 80 Faculté de Médecine de Strasbourg
La survie nette actuelle à long terme Qualités de sept méthodes d estimation PAR Alireza MOGHADDAM TUTEUR : Guy HÉDELIN Laboratoire d Épidémiologie et de Santé publique, EA 80 Faculté de Médecine de Strasbourg
La fusion des images en Médecine Nucléaire. Situation actuelle. La fusion des images en Médecine Nucléaire. Situation actuelle.
 La fusion des images en Médecine Nucléaire. Situation actuelle. La fusion des images en Médecine Nucléaire. Situation actuelle. M. Vermandel 1, 2, N. Betrouni 1, 2, E. Guedj 3, O. Mundler 3 1 Inserm U703,
La fusion des images en Médecine Nucléaire. Situation actuelle. La fusion des images en Médecine Nucléaire. Situation actuelle. M. Vermandel 1, 2, N. Betrouni 1, 2, E. Guedj 3, O. Mundler 3 1 Inserm U703,
Deux disques dans un carré
 Deux disques dans un carré Table des matières 1 Fiche résumé 2 2 Fiche élève Seconde - version 1 3 2.1 Le problème............................................... 3 2.2 Construction de la figure avec geogebra...............................
Deux disques dans un carré Table des matières 1 Fiche résumé 2 2 Fiche élève Seconde - version 1 3 2.1 Le problème............................................... 3 2.2 Construction de la figure avec geogebra...............................
Notre galaxie, la Voie lactée
 Chapitre 1 Notre galaxie, la Voie lactée Misha Haywood Au début du XX e siècle, alors que notre galaxie était encore désignée comme un «univers-île», expression forgée par Alexander V. Humboldt, un astronome
Chapitre 1 Notre galaxie, la Voie lactée Misha Haywood Au début du XX e siècle, alors que notre galaxie était encore désignée comme un «univers-île», expression forgée par Alexander V. Humboldt, un astronome
L éclairage naturel première partie : Principes de base
 Suzel BALEZ L5C 2007-08 L éclairage naturel première partie : Principes de base Hertzog et Partner Bât. De bureaux à Wiesbaden Plan Notions préliminaires La vision Grandeurs photométriques Le flux lumineux
Suzel BALEZ L5C 2007-08 L éclairage naturel première partie : Principes de base Hertzog et Partner Bât. De bureaux à Wiesbaden Plan Notions préliminaires La vision Grandeurs photométriques Le flux lumineux
Géodynamique. Unité d introduction et de socle commun aux 5 UE optionnelles choisies au second semestre de l'année de Master 1
 Géodynamique 2014 Unité d introduction et de socle commun aux 5 UE optionnelles choisies au second semestre de l'année de Master 1 Pré-requis: Bases en cinématique des plaques, géophysique, géologie sédimentaire,
Géodynamique 2014 Unité d introduction et de socle commun aux 5 UE optionnelles choisies au second semestre de l'année de Master 1 Pré-requis: Bases en cinématique des plaques, géophysique, géologie sédimentaire,
I - PUISSANCE D UN POINT PAR RAPPORT A UN CERCLE CERCLES ORTHOGONAUX POLES ET POLAIRES
 I - PUISSANCE D UN POINT PAR RAPPORT A UN CERCLE CERCLES ORTHOGONAUX POLES ET POLAIRES Théorème - Définition Soit un cercle (O,R) et un point. Une droite passant par coupe le cercle en deux points A et
I - PUISSANCE D UN POINT PAR RAPPORT A UN CERCLE CERCLES ORTHOGONAUX POLES ET POLAIRES Théorème - Définition Soit un cercle (O,R) et un point. Une droite passant par coupe le cercle en deux points A et
ANALYSE NUMERIQUE ET OPTIMISATION. Une introduction à la modélisation mathématique et à la simulation numérique
 1 ANALYSE NUMERIQUE ET OPTIMISATION Une introduction à la modélisation mathématique et à la simulation numérique G. ALLAIRE 28 Janvier 2014 CHAPITRE I Analyse numérique: amphis 1 à 12. Optimisation: amphis
1 ANALYSE NUMERIQUE ET OPTIMISATION Une introduction à la modélisation mathématique et à la simulation numérique G. ALLAIRE 28 Janvier 2014 CHAPITRE I Analyse numérique: amphis 1 à 12. Optimisation: amphis
INTÉRÊT DU SCANNER 3D DANS LA MESURE DE L'ANTÉVERSION DES COLS FÉMORAUX
 INTÉRÊT DU SCANNER 3D DANS LA MESURE DE L'ANTÉVERSION DES COLS FÉMORAUX F. COLAS, R. CARLIER, C. LE BRETON, D. SAFA, D. MOMPOINT, F. ROFFI, E. M. KOCHEIDA, S. MOKHTARI, S. M KAOUAR, C. VALLÉE HÔPITAL RAYMOND
INTÉRÊT DU SCANNER 3D DANS LA MESURE DE L'ANTÉVERSION DES COLS FÉMORAUX F. COLAS, R. CARLIER, C. LE BRETON, D. SAFA, D. MOMPOINT, F. ROFFI, E. M. KOCHEIDA, S. MOKHTARI, S. M KAOUAR, C. VALLÉE HÔPITAL RAYMOND
3. SPÉCIFICATIONS DU LOGICIEL. de l'expression des besoins à la conception. Spécifications fonctionnelles Analyse fonctionnelle et méthodes
 PLAN CYCLE DE VIE D'UN LOGICIEL EXPRESSION DES BESOINS SPÉCIFICATIONS DU LOGICIEL CONCEPTION DU LOGICIEL LA PROGRAMMATION TESTS ET MISE AU POINT DOCUMENTATION CONCLUSION C.Crochepeyre Génie Logiciel Diapason
PLAN CYCLE DE VIE D'UN LOGICIEL EXPRESSION DES BESOINS SPÉCIFICATIONS DU LOGICIEL CONCEPTION DU LOGICIEL LA PROGRAMMATION TESTS ET MISE AU POINT DOCUMENTATION CONCLUSION C.Crochepeyre Génie Logiciel Diapason
Fonctions de plusieurs variables, intégrales multiples, et intégrales dépendant d un paramètre
 IUFM du Limousin 2009-10 PLC1 Mathématiques S. Vinatier Rappels de cours Fonctions de plusieurs variables, intégrales multiples, et intégrales dépendant d un paramètre 1 Fonctions de plusieurs variables
IUFM du Limousin 2009-10 PLC1 Mathématiques S. Vinatier Rappels de cours Fonctions de plusieurs variables, intégrales multiples, et intégrales dépendant d un paramètre 1 Fonctions de plusieurs variables
3 Approximation de solutions d équations
 3 Approximation de solutions d équations Une équation scalaire a la forme générale f(x) =0où f est une fonction de IR dans IR. Un système de n équations à n inconnues peut aussi se mettre sous une telle
3 Approximation de solutions d équations Une équation scalaire a la forme générale f(x) =0où f est une fonction de IR dans IR. Un système de n équations à n inconnues peut aussi se mettre sous une telle
Circuits RL et RC. Chapitre 5. 5.1 Inductance
 Chapitre 5 Circuits RL et RC Ce chapitre présente les deux autres éléments linéaires des circuits électriques : l inductance et la capacitance. On verra le comportement de ces deux éléments, et ensuite
Chapitre 5 Circuits RL et RC Ce chapitre présente les deux autres éléments linéaires des circuits électriques : l inductance et la capacitance. On verra le comportement de ces deux éléments, et ensuite
OM 1 Outils mathématiques : fonction de plusieurs variables
 Outils mathématiques : fonction de plusieurs variables PCSI 2013 2014 Certaines partie de ce chapitre ne seront utiles qu à partir de l année prochaine, mais une grande partie nous servira dès cette année.
Outils mathématiques : fonction de plusieurs variables PCSI 2013 2014 Certaines partie de ce chapitre ne seront utiles qu à partir de l année prochaine, mais une grande partie nous servira dès cette année.
 Mémoire d Actuariat Tarification de la branche d assurance des accidents du travail Aymeric Souleau [email protected] 3 Septembre 2010 Plan 1 Introduction Les accidents du travail L assurance des
Mémoire d Actuariat Tarification de la branche d assurance des accidents du travail Aymeric Souleau [email protected] 3 Septembre 2010 Plan 1 Introduction Les accidents du travail L assurance des
Calcul intégral élémentaire en plusieurs variables
 Calcul intégral élémentaire en plusieurs variables PC*2 2 septembre 2009 Avant-propos À part le théorème de Fubini qui sera démontré dans le cours sur les intégrales à paramètres et qui ne semble pas explicitement
Calcul intégral élémentaire en plusieurs variables PC*2 2 septembre 2009 Avant-propos À part le théorème de Fubini qui sera démontré dans le cours sur les intégrales à paramètres et qui ne semble pas explicitement
Les atouts et faiblesses des caméras TEP dédiées, TEP corps entier, TEP-CT, TEMP pour la quantification
 Les atouts et faiblesses des caméras TEP dédiées, TEP corps entier, TEP-CT, TEMP pour la quantification Irène Buvat U494 INSERM CHU Pitié-Salpêtrière, Paris [email protected] http://www.guillemet.org/irene
Les atouts et faiblesses des caméras TEP dédiées, TEP corps entier, TEP-CT, TEMP pour la quantification Irène Buvat U494 INSERM CHU Pitié-Salpêtrière, Paris [email protected] http://www.guillemet.org/irene
MOTORISATION DIRECTDRIVE POUR NOS TELESCOPES. Par C.CAVADORE ALCOR-SYSTEM WETAL 2013 10 Nov
 1 MOTORISATION DIRECTDRIVE POUR NOS TELESCOPES Par C.CAVADORE ALCOR-SYSTEM WETAL 2013 10 Nov Pourquoi motoriser un télescope? 2 Pour compenser le mouvement de la terre (15 /h) Observation visuelle Les
1 MOTORISATION DIRECTDRIVE POUR NOS TELESCOPES Par C.CAVADORE ALCOR-SYSTEM WETAL 2013 10 Nov Pourquoi motoriser un télescope? 2 Pour compenser le mouvement de la terre (15 /h) Observation visuelle Les
1 Définition. 2 Systèmes matériels et solides. 3 Les actions mécaniques. Le système matériel : Il peut être un ensemble.un sous-ensemble..
 1 Définition GÉNÉRALITÉS Statique 1 2 Systèmes matériels et solides Le système matériel : Il peut être un ensemble.un sous-ensemble..une pièce mais aussi un liquide ou un gaz Le solide : Il est supposé
1 Définition GÉNÉRALITÉS Statique 1 2 Systèmes matériels et solides Le système matériel : Il peut être un ensemble.un sous-ensemble..une pièce mais aussi un liquide ou un gaz Le solide : Il est supposé
Les moments de force. Ci-contre, un schéma du submersible MIR où l on voit les bras articulés pour la récolte d échantillons [ 1 ]
![Les moments de force. Ci-contre, un schéma du submersible MIR où l on voit les bras articulés pour la récolte d échantillons [ 1 ]](/thumbs/20/424260.jpg "Les moments de force. Ci-contre, un schéma du submersible MIR où l on voit les bras articulés pour la récolte d échantillons [ 1 ]") Les moments de force Les submersibles Mir peuvent plonger à 6 000 mètres, rester en immersion une vingtaine d heures et abriter 3 personnes (le pilote et deux observateurs), dans une sphère pressurisée
Les moments de force Les submersibles Mir peuvent plonger à 6 000 mètres, rester en immersion une vingtaine d heures et abriter 3 personnes (le pilote et deux observateurs), dans une sphère pressurisée
Reconnaissance de visages 2.5D par fusion des indices de texture et de profondeur ICI 12/12/12
 Reconnaissance de visages 2.5D par fusion des indices de texture et de profondeur ICI 12/12/12 2 Discrimination Invariance Expressions faciales Age Pose Eclairage 11/12/2012 3 Personne Inconnue Identité
Reconnaissance de visages 2.5D par fusion des indices de texture et de profondeur ICI 12/12/12 2 Discrimination Invariance Expressions faciales Age Pose Eclairage 11/12/2012 3 Personne Inconnue Identité
ELEMENTS DE COMPTABILITE NATIONALE
 ELEMENTS DE COMPTABILITE NATIONALE Cours de M. Di Roberto Université Victor Segalen Bordeaux 2 Bibliographie Ce cours s inspire largement des ouvrages essentiels suivants. Merci à leurs auteurs. BOSSERELLE
ELEMENTS DE COMPTABILITE NATIONALE Cours de M. Di Roberto Université Victor Segalen Bordeaux 2 Bibliographie Ce cours s inspire largement des ouvrages essentiels suivants. Merci à leurs auteurs. BOSSERELLE
Bases physiques de l imagerie en
 Bases physiques de l imagerie en Médecine Nucléaire (MN) Pr. Malika ÇAOUI Service de Médecine Nucléaire CHU International Cheikh Zaid Faculté de Médecine et de Pharmacie - Rabat- 02/12/2010 Pr. Malika
Bases physiques de l imagerie en Médecine Nucléaire (MN) Pr. Malika ÇAOUI Service de Médecine Nucléaire CHU International Cheikh Zaid Faculté de Médecine et de Pharmacie - Rabat- 02/12/2010 Pr. Malika
Oscillations libres des systèmes à deux degrés de liberté
 Chapitre 4 Oscillations libres des systèmes à deux degrés de liberté 4.1 Introduction Les systèmes qui nécessitent deux coordonnées indépendantes pour spécifier leurs positions sont appelés systèmes à
Chapitre 4 Oscillations libres des systèmes à deux degrés de liberté 4.1 Introduction Les systèmes qui nécessitent deux coordonnées indépendantes pour spécifier leurs positions sont appelés systèmes à
Tout ce que vous avez toujours voulu savoir sur la scintigraphie osseuse et le TEP-SCAN
 Tout ce que vous avez toujours voulu savoir sur la scintigraphie osseuse et le TEP-SCAN Docteur Antoine MONET Centre d Imagerie Fonctionnelle Clinique Saint Augustin Jeudi 25 Septembre 2008 Un peu d histoire
Tout ce que vous avez toujours voulu savoir sur la scintigraphie osseuse et le TEP-SCAN Docteur Antoine MONET Centre d Imagerie Fonctionnelle Clinique Saint Augustin Jeudi 25 Septembre 2008 Un peu d histoire
Fonctions de plusieurs variables : dérivés partielles, diérentielle. Fonctions composées. Fonctions de classe C 1. Exemples
 45 Fonctions de plusieurs variables : dérivés partielles, diérentielle. Fonctions composées. Fonctions de classe C 1. Exemples Les espaces vectoriels considérés sont réels, non réduits au vecteur nul et
45 Fonctions de plusieurs variables : dérivés partielles, diérentielle. Fonctions composées. Fonctions de classe C 1. Exemples Les espaces vectoriels considérés sont réels, non réduits au vecteur nul et