NOTES DE COURS DES COURBES AUX SURFACES MOHAMED DAOUDI
|
|
|
- Flore Paul
- il y a 8 ans
- Total affichages :
Transcription

1 LA CHAINE NUMÉRIQUE 3D : DE L ACQUISITION À LA COMPRESSION DES DONNÉES NOTES DE COURS DES COURBES AUX SURFACES MOHAMED DAOUDI PROFESSEUR TELECOM LILLE 1, LIFL

2 Moteurs de Recherche 3D 2

3 Moteurs de recherche 3D Recherche Par le contenu Classification Catégories database Query Objet Trouver des descripteurs invariants robustes. Trouver de bonnes distances, facile à calculer et rapides. Passage à l échelle.





4 Analyse des surfaces faciales 3D Des scanners disponibles Laser/structured-light/ToF/Passive stereo/etc.

.")

5 Espace de formes Définir des espaces où les éléments sont des objets (courbes, surfaces, etc..). Modéliser les déformations par les chemins géodésiques. S. Kurtek et al. TPAMI
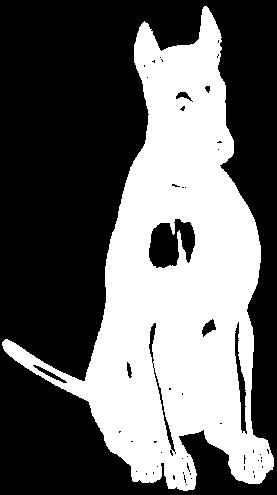
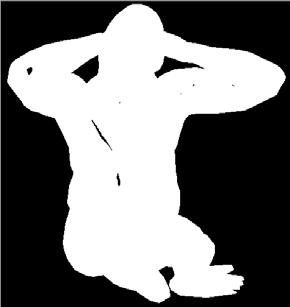
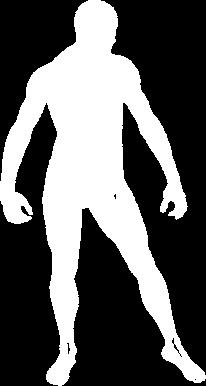
6 Statistique dans l espace des formes Scanner un nombre important de corps humains Différentes poses Différentes personnes Calculer la mise en correspondance Calculer des statistiques (moyennes, PCA, etc..)




7 Nouveaux systèmes d acquisition 7
8 Formes 3D vs images Géométrie Parametrisation Echantillonage uniforme Euclidean Globale Uniform Cartesian Non-Euclidienne Locale Courtesy of Michael Bronstein Echantillonage uniforme non définie




9 Formes 3D vs images Représentation Déformations Tableau de pixels Nuage de points, maillage, etc, etc. Rotation, affine, projective, etc. Richesse des déformations nonrigides








10 Challenges Similarité rigide Similarité non-rigide Similarité topologique Similarité partielle Courtesy of Michael Bronstein



11 Outils Géométrie différentielle Géométrie Riemannienne Géométrie spectrale
12 Courbes 2D Un seul paramètre t P(t)

13 Les courbes Soit une courbe paramétrisée par l abscisse curviligne. est la trajectoire de la voiture qui roule à une vitesse constante. est le vecteur vitesse, il indique le taux du changement de la position, il est tangent à la courbe. indique le vecteur accélération, perpendiculaire à la courbe. La courbure k = d une courbe est une mesure quantitative du caractère «plus ou moins courbé» de cette courbe. 13
14 Courbes 3D Un seul paramètre

15 C est quoi une surface?
16 Paramétrisation d une surface v x(u; v) u S P (u; v) x 1 (u; v) v u
17 Surface et courbes z v x u y 17
18 Exemple : les coordonnées cylindriques x(u; v) = (R cos u; R sin u; v)


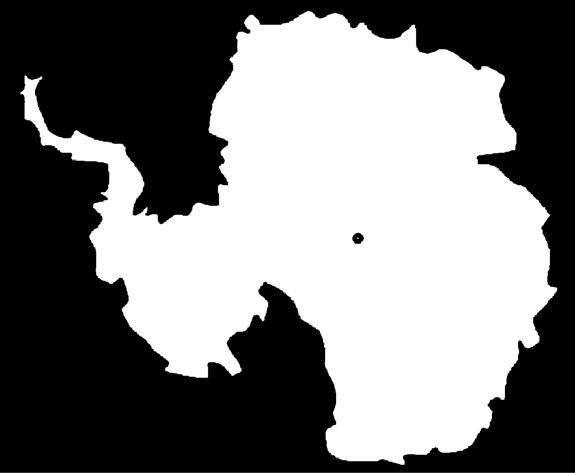
19 Exemple : paramétrisation de la terre v u x = r cos v cos u y = r sin v cos u z = r sin u
20 Plan tangent et normal En chaque point q 2 U, nous définissons un système de coordonnées locales : q v u Une paramétrisation est dite régulière si x u et x v sont linéairement indépendants. x u Le plan T p S = spanfx u ; x v g est le plan tangent au point. Une approximation Euclidienne de la surface. p T p S x v S N? T p S est la normale à la surface. 20
21 Exercice : coordonnées cylindriques x(u; v) = (R cos u; R sin u; v)
22 La première forme fondamentale dv du Un déplacement infinitésimal du Displace sur la surface de dx = x(u + du) x(u) = x u du + x v dv = Jdu x u x u et est la matrice Jacobienne de colonne x v T p S x v
23 Exemple : paramétrisation de la terre Parametrisation x = r cos v cos u y = r sin v cos u z = r sin u Calculer la matrice Jacobienne?

24 La première forme fondamentale La longueur du déplacement est une matrice 2x2 symétrique définie positivie, Les éléments de sont des produits scalaires La forme quadratique : est la première forme fondamentale
25 La première forme fondamentale un chemin dans le domaine de paramétrisation. correspond au chemin sur la surface. L incrémentantation du paramètre t par, dans le domaine de paramétrisation de : induit un déplacement v Le déplacement sur la surface est de ds = x u du + x v dv = Jdu est le Jacobien de la paramétrisation. u 25
26 La première forme fondamentale (Do Carmo) Définition : La restriction du produit euclidien de au plan tangent T p S à en p est dite la I-forme fondamentale de la surface en p. S S La I-forme fondamentale d une surface est une forme bilinéaire symmétrique définie positive sur T p S La matrice associée à cette forme dans la base par : est definie
27 Première forme fondamentale Parametrisation x = r cos v cos u y = r sin v cos u z = r sin u Calculer la matrice Jacobienne? Calculer la première forme fondamentale?
28 La première forme fondamentale Exercice : Calcul de l aire d une région R d une surface S? 28


29 La première forme fondamentale Soit une courbe définie dans le domaine de paramétrage: Son image sur la surface est : Un déplacement du paramètre t de : Génère un déplacement de : La longueur de cette courbe sur la surface est : 29

30 Géométrie intrinsèque La longueur d une courbe Le point de vue différentielle Induit une métrique (intrinsèque) La géométrie intrinsèque est complétement décrite par la première forme fondamentale. La première forme est invariante aux isométries. 30



31 Distance géodésique v.s distance Euclidienne Courtesy of Michael Bronstein 31


32 Maillages et graphes Un maillage triangulaire est une Une géométrie Une topologie Topologie Réalisation géométrique 32
33 Exemple d un maillage Vertices Coordinates Edges Faces Topologie Geométrie 33

34 Exemple de calcul de la normale Calcul de la normale 34





35 Surfaces et variétés (manifolds) Un espace toplogique qui localement ressemble (homéomorphe) à est une variété de dimension n. Not a manifold
36 Surfaces et variétés (manifolds) Arrête partagé par 4 triangles Un maillage qui n est pas une variété 36
37 Distance Nous définissions une fonction distance qui mesure les distances locales : Le chemin entre deux points segments connectés : est l ensemble des Où et La longueur d un chemin = la sommes des longueurs des segments est définie par : 37
38 Distance géodésique Le plus court chemin entre deux points Objectif approximer la distance géodésique par Problème du plus cours chemin : calculer entre les points et 38

39 Dijkstra s algorithm Brussels Prague Paris Berlin Munich Vienna Courtesy of Michael Bronstein 39

40 Exemple de calcul de distance géodésique 40

41 Les courbures [Image wikipédia] 41
42 Rappels mathématiques Soit une fonction, la dérivée de F au point est la matrice position p change qui décrit les petites variations en F(p) quand la Si est exprimée en terme alors la dérivée est la matrice de taille 42
43 Rappels mathématiques Etant donnée une fonction, nous pouvons approximer cette fonction autour du point (0,0) par le polynôme de Taylor : Constante Linéaire quadratique Si F(0,0) = 0 et 43
44 Rappels mathématiques Forme quadratique Nous pouvons ré-écrire F de la façon suivante : 44

45 Rappels mathématiques 45
46 Courbures Nous supposons P est l origine Le plan x-y est le plan tangent Localement la surface est approximée par z=f(x,y) 46
47 Courbures Si y=0, nous obtenons la courbe ayant comme courbure 47
48 Courbures Si x=0, nous obtenons la courbe ayant comme courbure 48

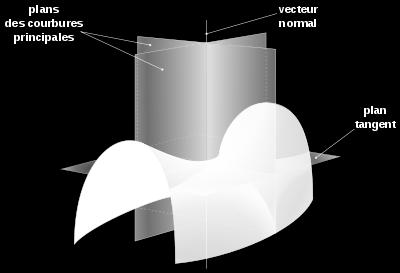
49 Courbures Tout autre ligne dans le plan tangent, génère une courbe avec une courbure comprise entre 49
50 Courbures Les valeurs de et sont les courbures principales au point p et les directions des courbes correspondantes au point p sont appelées les directions principales. 50
51 Caractérisation de surfaces Descripteur local : détails du modèle k 1 = k 2 = 2 k 1 = k 2 = -2 k 1 = 2 ; k 2 = -2 k 1 = 2 ; k 2 = 0
52 Courbures Le produit des principales de courbures, courbure Gaussienne. est appelé la La somme des principales de courbures, courbure moyenne. est appelée la 52
53 Endmorphisme de Weingartan La deuxième forme fondamentale d une surface en un point est la forme bilinéaire symétrique sur définie par la matrice dans la base k 1 et k 2 sont les vecteurs propres de l endormorphisme de Weingarten defini par la matrice : W = I 1.II 53

54 Démo Meshlab 54

55 3D face segmentation The pose correction Kyong I. Chang, Thesis, 2004
56 3D face segmentation a nose tip is expected to be a peak K > T K ; H < T H a pair of eye cavities can be a pair of pit regions K > T K ; H < T H the nose bridge can be a saddle region K < T K ; H > T H
57 Spectre de courbure (Shape Index) Une seule valeur (Koenderink & van Doorn ) : Propriétés : invariante par rapport à la rotation et au facteur d échelle intervalle [-1; +1] I le rapport permet de s'affranchir de la "force" des courbures valeurs de signes opposées = surfaces identiques mais d'orientations opposées calcul impossible avec : k 1 = k 2, k 1 + k 2 0 : I p = ± 1 selon signe de k 1 + k 2 k 1 = k 2 = 0 : plan, valeur particulière attribuée à I p P 2 k = arctan π k 1 P 1 P + k k 2 P 2 P, k 1 P k 2 P
58 Spectre de courbure
59 Spectre de courbure (Shape Index) Une seule valeur (Koenderink & van Doorn ) : Propriétés : invariante par rapport à la rotation et au facteur d échelle intervalle [-1; +1] I le rapport permet de s'affranchir de la "force" des courbures valeurs de signes opposées = surfaces identiques mais d'orientations opposées calcul impossible avec : k 1 = k 2, k 1 + k 2 0 : I p = ± 1 selon signe de k 1 + k 2 k 1 = k 2 = 0 : plan, valeur particulière attribuée à I p P 2 k = arctan π k 1 P 1 P + k k 2 P 2 P, k 1 P k 2 P
60 Spectre de courbure
61 Paramétrisation de Monge Représentation implicite : la surface est l ensemble des points (x,y,z) de l espace vérifiant l équation F(x,y,z). Représentation paramétrique : la surface est l image dans R 3 d un sous-ensemble D de R 2 par une fonction X : X(u 1,u 2 )=(x(u 1,u 2 ), y(u 1,u 2 ), z(u 1,u 2 )). Représentation par graphe : la surface est l ensemble des triplets (x,y,f(x,y)), avec x et y deux réels.
62 Paramétrisation de Monge Une paramétrisation de Monge est une fonction différentiable r, définie d un ouvert U de R 2 et à valeurs dans R 3, de la forme :
63 Paramétrisation de Monge
64 Les formes fondamentales de la paramétrisation de Monge = yy xy xy xx y x f f f f f f II = y y x y x x f f f f f f I ),, ( y x t y x f f f f N + + =
65 Approximation par une quadrique
66 Approximation par une quadrique
67 Références Bronstein A., Bronstein M., Kimmel R. (2008). Numerical geometry of non-rigid shapes. Springer. Andrew Pressley, Elementary differential geometry, Springer Barrett O neill, Elementary Differnetial geometry Manfredo DoCarmo, Differential Geometry of Curves and Surfaces 67
FONCTIONS DE PLUSIEURS VARIABLES (Outils Mathématiques 4)
") FONCTIONS DE PLUSIEURS VARIABLES (Outils Mathématiques 4) Bernard Le Stum Université de Rennes 1 Version du 13 mars 2009 Table des matières 1 Fonctions partielles, courbes de niveau 1 2 Limites et continuité
FONCTIONS DE PLUSIEURS VARIABLES (Outils Mathématiques 4) Bernard Le Stum Université de Rennes 1 Version du 13 mars 2009 Table des matières 1 Fonctions partielles, courbes de niveau 1 2 Limites et continuité
Fonctions de deux variables. Mai 2011
 Fonctions de deux variables Dédou Mai 2011 D une à deux variables Les fonctions modèlisent de l information dépendant d un paramètre. On a aussi besoin de modéliser de l information dépendant de plusieurs
Fonctions de deux variables Dédou Mai 2011 D une à deux variables Les fonctions modèlisent de l information dépendant d un paramètre. On a aussi besoin de modéliser de l information dépendant de plusieurs
On ne peut pas entendre la forme d un tambour
 On ne peut pas entendre la forme d un tambour Pierre Bérard Institut Fourier Laboratoire de Mathématiques Unité Mixte de Recherche 5582 CNRS UJF Université Joseph Fourier, Grenoble 1 Introduction 1.1 Position
On ne peut pas entendre la forme d un tambour Pierre Bérard Institut Fourier Laboratoire de Mathématiques Unité Mixte de Recherche 5582 CNRS UJF Université Joseph Fourier, Grenoble 1 Introduction 1.1 Position
Cours3. Applications continues et homéomorphismes. 1 Rappel sur les images réciproques
 Université de Provence Topologie 2 Cours3. Applications continues et homéomorphismes 1 Rappel sur les images réciproques Soit une application f d un ensemble X vers un ensemble Y et soit une partie P de
Université de Provence Topologie 2 Cours3. Applications continues et homéomorphismes 1 Rappel sur les images réciproques Soit une application f d un ensemble X vers un ensemble Y et soit une partie P de
Programme de la classe de première année MPSI
 Objectifs Programme de la classe de première année MPSI I - Introduction à l analyse L objectif de cette partie est d amener les étudiants vers des problèmes effectifs d analyse élémentaire, d introduire
Objectifs Programme de la classe de première année MPSI I - Introduction à l analyse L objectif de cette partie est d amener les étudiants vers des problèmes effectifs d analyse élémentaire, d introduire
Différentiabilité ; Fonctions de plusieurs variables réelles
 Différentiabilité ; Fonctions de plusieurs variables réelles Denis Vekemans R n est muni de l une des trois normes usuelles. 1,. 2 ou.. x 1 = i i n Toutes les normes de R n sont équivalentes. x i ; x 2
Différentiabilité ; Fonctions de plusieurs variables réelles Denis Vekemans R n est muni de l une des trois normes usuelles. 1,. 2 ou.. x 1 = i i n Toutes les normes de R n sont équivalentes. x i ; x 2
Fonctions de plusieurs variables : dérivés partielles, diérentielle. Fonctions composées. Fonctions de classe C 1. Exemples
 45 Fonctions de plusieurs variables : dérivés partielles, diérentielle. Fonctions composées. Fonctions de classe C 1. Exemples Les espaces vectoriels considérés sont réels, non réduits au vecteur nul et
45 Fonctions de plusieurs variables : dérivés partielles, diérentielle. Fonctions composées. Fonctions de classe C 1. Exemples Les espaces vectoriels considérés sont réels, non réduits au vecteur nul et
Fonctions de plusieurs variables
 Maths MP Exercices Fonctions de plusieurs variables Les indications ne sont ici que pour être consultées après le T (pour les exercices non traités). Avant et pendant le T, tenez bon et n allez pas les
Maths MP Exercices Fonctions de plusieurs variables Les indications ne sont ici que pour être consultées après le T (pour les exercices non traités). Avant et pendant le T, tenez bon et n allez pas les
Cours Fonctions de deux variables
 Cours Fonctions de deux variables par Pierre Veuillez 1 Support théorique 1.1 Représentation Plan et espace : Grâce à un repère cartésien ( ) O, i, j du plan, les couples (x, y) de R 2 peuvent être représenté
Cours Fonctions de deux variables par Pierre Veuillez 1 Support théorique 1.1 Représentation Plan et espace : Grâce à un repère cartésien ( ) O, i, j du plan, les couples (x, y) de R 2 peuvent être représenté
Cours de Mécanique du point matériel
 Cours de Mécanique du point matériel SMPC1 Module 1 : Mécanique 1 Session : Automne 2014 Prof. M. EL BAZ Cours de Mécanique du Point matériel Chapitre 1 : Complément Mathématique SMPC1 Chapitre 1: Rappels
Cours de Mécanique du point matériel SMPC1 Module 1 : Mécanique 1 Session : Automne 2014 Prof. M. EL BAZ Cours de Mécanique du Point matériel Chapitre 1 : Complément Mathématique SMPC1 Chapitre 1: Rappels
Intégrales doubles et triples - M
 Intégrales s et - [email protected] 1/27 - Intégrales (rappel) Rappels Approximation éfinition : Intégrale définie Soit f définie continue sur I = [a, b] telle que f (x) > 3 2.5 2 1.5 1.5.5 1 1.5
Intégrales s et - [email protected] 1/27 - Intégrales (rappel) Rappels Approximation éfinition : Intégrale définie Soit f définie continue sur I = [a, b] telle que f (x) > 3 2.5 2 1.5 1.5.5 1 1.5
Calcul intégral élémentaire en plusieurs variables
 Calcul intégral élémentaire en plusieurs variables PC*2 2 septembre 2009 Avant-propos À part le théorème de Fubini qui sera démontré dans le cours sur les intégrales à paramètres et qui ne semble pas explicitement
Calcul intégral élémentaire en plusieurs variables PC*2 2 septembre 2009 Avant-propos À part le théorème de Fubini qui sera démontré dans le cours sur les intégrales à paramètres et qui ne semble pas explicitement
Exercice 1 Trouver l équation du plan tangent pour chaque surface ci-dessous, au point (x 0,y 0,z 0 ) donné :
 donné :") Enoncés : Stephan de Bièvre Corrections : Johannes Huebschmann Exo7 Plans tangents à un graphe, différentiabilité Exercice 1 Trouver l équation du plan tangent pour chaque surface ci-dessous, au point
Enoncés : Stephan de Bièvre Corrections : Johannes Huebschmann Exo7 Plans tangents à un graphe, différentiabilité Exercice 1 Trouver l équation du plan tangent pour chaque surface ci-dessous, au point
Notes du cours MTH1101 Calcul I Partie II: fonctions de plusieurs variables
 Notes du cours MTH1101 Calcul I Partie II: fonctions de plusieurs variables Guy Desaulniers Département de mathématiques et de génie industriel École Polytechnique de Montréal Automne 2014 Table des matières
Notes du cours MTH1101 Calcul I Partie II: fonctions de plusieurs variables Guy Desaulniers Département de mathématiques et de génie industriel École Polytechnique de Montréal Automne 2014 Table des matières
3 Approximation de solutions d équations
 3 Approximation de solutions d équations Une équation scalaire a la forme générale f(x) =0où f est une fonction de IR dans IR. Un système de n équations à n inconnues peut aussi se mettre sous une telle
3 Approximation de solutions d équations Une équation scalaire a la forme générale f(x) =0où f est une fonction de IR dans IR. Un système de n équations à n inconnues peut aussi se mettre sous une telle
Notes du cours MTH1101N Calcul I Partie II: fonctions de plusieurs variables
 Notes du cours MTH1101N Calcul I Partie II: fonctions de plusieurs variables Fausto Errico Département de mathématiques et de génie industriel École Polytechnique de Montréal Automne 2012 Table des matières
Notes du cours MTH1101N Calcul I Partie II: fonctions de plusieurs variables Fausto Errico Département de mathématiques et de génie industriel École Polytechnique de Montréal Automne 2012 Table des matières
I. Polynômes de Tchebychev
 Première épreuve CCP filière MP I. Polynômes de Tchebychev ( ) 1.a) Tout réel θ vérifie cos(nθ) = Re ((cos θ + i sin θ) n ) = Re Cn k (cos θ) n k i k (sin θ) k Or i k est réel quand k est pair et imaginaire
Première épreuve CCP filière MP I. Polynômes de Tchebychev ( ) 1.a) Tout réel θ vérifie cos(nθ) = Re ((cos θ + i sin θ) n ) = Re Cn k (cos θ) n k i k (sin θ) k Or i k est réel quand k est pair et imaginaire
Résolution d équations non linéaires
 Analyse Numérique Résolution d équations non linéaires Said EL HAJJI et Touria GHEMIRES Université Mohammed V - Agdal. Faculté des Sciences Département de Mathématiques. Laboratoire de Mathématiques, Informatique
Analyse Numérique Résolution d équations non linéaires Said EL HAJJI et Touria GHEMIRES Université Mohammed V - Agdal. Faculté des Sciences Département de Mathématiques. Laboratoire de Mathématiques, Informatique
CHAPITRE 10. Jacobien, changement de coordonnées.
 CHAPITRE 10 Jacobien, changement de coordonnées ans ce chapitre, nous allons premièrement rappeler la définition du déterminant d une matrice Nous nous limiterons au cas des matrices d ordre 2 2et3 3,
CHAPITRE 10 Jacobien, changement de coordonnées ans ce chapitre, nous allons premièrement rappeler la définition du déterminant d une matrice Nous nous limiterons au cas des matrices d ordre 2 2et3 3,
Développements limités. Notion de développement limité
 MT12 - ch2 Page 1/8 Développements limités Dans tout ce chapitre, I désigne un intervalle de R non vide et non réduit à un point. I Notion de développement limité Dans tout ce paragraphe, a désigne un
MT12 - ch2 Page 1/8 Développements limités Dans tout ce chapitre, I désigne un intervalle de R non vide et non réduit à un point. I Notion de développement limité Dans tout ce paragraphe, a désigne un
OM 1 Outils mathématiques : fonction de plusieurs variables
 Outils mathématiques : fonction de plusieurs variables PCSI 2013 2014 Certaines partie de ce chapitre ne seront utiles qu à partir de l année prochaine, mais une grande partie nous servira dès cette année.
Outils mathématiques : fonction de plusieurs variables PCSI 2013 2014 Certaines partie de ce chapitre ne seront utiles qu à partir de l année prochaine, mais une grande partie nous servira dès cette année.
8.1 Généralités sur les fonctions de plusieurs variables réelles. f : R 2 R (x, y) 1 x 2 y 2
 1 x 2 y 2") Chapitre 8 Fonctions de plusieurs variables 8.1 Généralités sur les fonctions de plusieurs variables réelles Définition. Une fonction réelle de n variables réelles est une application d une partie de R
Chapitre 8 Fonctions de plusieurs variables 8.1 Généralités sur les fonctions de plusieurs variables réelles Définition. Une fonction réelle de n variables réelles est une application d une partie de R
Fonctions de plusieurs variables
 Module : Analyse 03 Chapitre 00 : Fonctions de plusieurs variables Généralités et Rappels des notions topologiques dans : Qu est- ce que?: Mathématiquement, n étant un entier non nul, on définit comme
Module : Analyse 03 Chapitre 00 : Fonctions de plusieurs variables Généralités et Rappels des notions topologiques dans : Qu est- ce que?: Mathématiquement, n étant un entier non nul, on définit comme
Vision industrielle et télédétection - Détection d ellipses. Guillaume Martinez 17 décembre 2007
 Vision industrielle et télédétection - Détection d ellipses Guillaume Martinez 17 décembre 2007 1 Table des matières 1 Le projet 3 1.1 Objectif................................ 3 1.2 Les choix techniques.........................
Vision industrielle et télédétection - Détection d ellipses Guillaume Martinez 17 décembre 2007 1 Table des matières 1 Le projet 3 1.1 Objectif................................ 3 1.2 Les choix techniques.........................
Repérage d un point - Vitesse et
 PSI - écanique I - Repérage d un point - Vitesse et accélération page 1/6 Repérage d un point - Vitesse et accélération Table des matières 1 Espace et temps - Référentiel d observation 1 2 Coordonnées
PSI - écanique I - Repérage d un point - Vitesse et accélération page 1/6 Repérage d un point - Vitesse et accélération Table des matières 1 Espace et temps - Référentiel d observation 1 2 Coordonnées
Mathématiques I Section Architecture, EPFL
 Examen, semestre d hiver 2011 2012 Mathématiques I Section Architecture, EPFL Chargé de cours: Gavin Seal Instructions: Mettez votre nom et votre numéro Sciper sur chaque page de l examen. Faites de même
Examen, semestre d hiver 2011 2012 Mathématiques I Section Architecture, EPFL Chargé de cours: Gavin Seal Instructions: Mettez votre nom et votre numéro Sciper sur chaque page de l examen. Faites de même
Analyse de la vidéo. Chapitre 4.1 - La modélisation pour le suivi d objet. 10 mars 2015. Chapitre 4.1 - La modélisation d objet 1 / 57
 Analyse de la vidéo Chapitre 4.1 - La modélisation pour le suivi d objet 10 mars 2015 Chapitre 4.1 - La modélisation d objet 1 / 57 La représentation d objets Plan de la présentation 1 La représentation
Analyse de la vidéo Chapitre 4.1 - La modélisation pour le suivi d objet 10 mars 2015 Chapitre 4.1 - La modélisation d objet 1 / 57 La représentation d objets Plan de la présentation 1 La représentation
Cours d Analyse. Fonctions de plusieurs variables
 Cours d Analyse Fonctions de plusieurs variables Licence 1ère année 2007/2008 Nicolas Prioux Université de Marne-la-Vallée Table des matières 1 Notions de géométrie dans l espace et fonctions à deux variables........
Cours d Analyse Fonctions de plusieurs variables Licence 1ère année 2007/2008 Nicolas Prioux Université de Marne-la-Vallée Table des matières 1 Notions de géométrie dans l espace et fonctions à deux variables........
Baccalauréat ES Pondichéry 7 avril 2014 Corrigé
 Baccalauréat ES Pondichéry 7 avril 204 Corrigé EXERCICE 4 points Commun à tous les candidats. Proposition fausse. La tangente T, passant par les points A et B d abscisses distinctes, a pour coefficient
Baccalauréat ES Pondichéry 7 avril 204 Corrigé EXERCICE 4 points Commun à tous les candidats. Proposition fausse. La tangente T, passant par les points A et B d abscisses distinctes, a pour coefficient
Master de Recherche première année. Programme de cours 2008-2011
 Master de Recherche première année Mention : Mathématiques et Applications Spécialité : Mathématiques fondamentales et appliquées Responsable : Xue Ping WANG Programme de cours 2008-2011 Module M1 : Analyse
Master de Recherche première année Mention : Mathématiques et Applications Spécialité : Mathématiques fondamentales et appliquées Responsable : Xue Ping WANG Programme de cours 2008-2011 Module M1 : Analyse
Développements limités, équivalents et calculs de limites
 Développements ités, équivalents et calculs de ites Eercice. Déterminer le développement ité en 0 à l ordre n des fonctions suivantes :. f() e (+) 3 n. g() sin() +ln(+) n 3 3. h() e sh() n 4. i() sin(
Développements ités, équivalents et calculs de ites Eercice. Déterminer le développement ité en 0 à l ordre n des fonctions suivantes :. f() e (+) 3 n. g() sin() +ln(+) n 3 3. h() e sh() n 4. i() sin(
Maîtrise universitaire ès sciences en mathématiques 2012-2013
 1 / 6 Remarques liminaires : Ce master à (3 semestres) permet 2 orientations distinctes : - Un master général : "Mathématiques, Systèmes dynamiques et phénomènes d'évolution" - Un master qui permet de
1 / 6 Remarques liminaires : Ce master à (3 semestres) permet 2 orientations distinctes : - Un master général : "Mathématiques, Systèmes dynamiques et phénomènes d'évolution" - Un master qui permet de
Calcul différentiel. Chapitre 1. 1.1 Différentiabilité
 Chapitre 1 Calcul différentiel L idée du calcul différentiel est d approcher au voisinage d un point une fonction f par une fonction plus simple (ou d approcher localement le graphe de f par un espace
Chapitre 1 Calcul différentiel L idée du calcul différentiel est d approcher au voisinage d un point une fonction f par une fonction plus simple (ou d approcher localement le graphe de f par un espace
Propriétés électriques de la matière
 1 Propriétés électriques de la matière La matière montre des propriétés électriques qui ont été observées depuis l antiquité. Nous allons distinguer les plus fondamentales de ces propriétés. 1 Propriétés
1 Propriétés électriques de la matière La matière montre des propriétés électriques qui ont été observées depuis l antiquité. Nous allons distinguer les plus fondamentales de ces propriétés. 1 Propriétés
Continuité d une fonction de plusieurs variables
 Chapitre 2 Continuité d une fonction de plusieurs variables Maintenant qu on a défini la notion de limite pour des suites dans R n, la notion de continuité s étend sans problème à des fonctions de plusieurs
Chapitre 2 Continuité d une fonction de plusieurs variables Maintenant qu on a défini la notion de limite pour des suites dans R n, la notion de continuité s étend sans problème à des fonctions de plusieurs
MATHÉMATIQUES EN PREMIER CYCLE PRÉSENTATION DU PROGRAMME
 Notre cadre de réflexion MATHÉMATIQUES EN PREMIER CYCLE PRÉSENTATION DU PROGRAMME La proposition de programme qui suit est bien sûr issue d une demande du Premier Cycle : demande de rénovation des contenus
Notre cadre de réflexion MATHÉMATIQUES EN PREMIER CYCLE PRÉSENTATION DU PROGRAMME La proposition de programme qui suit est bien sûr issue d une demande du Premier Cycle : demande de rénovation des contenus
Mais où est donc passée la relativité générale? Version 3.0
 Mais où est donc passée la relativité générale? Version 3.0 Pascal Picard 29 mars 2015 Je suis amateur de Mathématiques et de Physique Théorique, convaincu que ces sciences sont accessibles à tous, à condition
Mais où est donc passée la relativité générale? Version 3.0 Pascal Picard 29 mars 2015 Je suis amateur de Mathématiques et de Physique Théorique, convaincu que ces sciences sont accessibles à tous, à condition
ENSAE - DAKAR BROCHURE D'INFORMATION SUR LE CONCOURS DE RECRUTEMENT D ÉLÈVES INGÉNIEURS STATISTICIENS ÉCONOMISTES (I S E) Option Mathématiques CAPESA
 Option Mathématiques CAPESA") ENSEA - ABIDJAN ENSAE - DAKAR ISSEA - YAOUNDÉ BROCHURE D'INFORMATION SUR LE CONCOURS DE RECRUTEMENT D ÉLÈVES INGÉNIEURS STATISTICIENS ÉCONOMISTES (I S E) Option Mathématiques CAPESA CENTRE D APPUI AUX
ENSEA - ABIDJAN ENSAE - DAKAR ISSEA - YAOUNDÉ BROCHURE D'INFORMATION SUR LE CONCOURS DE RECRUTEMENT D ÉLÈVES INGÉNIEURS STATISTICIENS ÉCONOMISTES (I S E) Option Mathématiques CAPESA CENTRE D APPUI AUX
Cours d Analyse 3 Fonctions de plusieurs variables
 Université Claude Bernard, Lyon I Licence Sciences, Technologies & Santé 43, boulevard 11 novembre 1918 Spécialité Mathématiques 69622 Villeurbanne cedex, France L. Pujo-Menjouet [email protected]
Université Claude Bernard, Lyon I Licence Sciences, Technologies & Santé 43, boulevard 11 novembre 1918 Spécialité Mathématiques 69622 Villeurbanne cedex, France L. Pujo-Menjouet [email protected]
Continuité et dérivabilité d une fonction
 DERNIÈRE IMPRESSIN LE 7 novembre 014 à 10:3 Continuité et dérivabilité d une fonction Table des matières 1 Continuité d une fonction 1.1 Limite finie en un point.......................... 1. Continuité
DERNIÈRE IMPRESSIN LE 7 novembre 014 à 10:3 Continuité et dérivabilité d une fonction Table des matières 1 Continuité d une fonction 1.1 Limite finie en un point.......................... 1. Continuité
Fonctions de plusieurs variables et applications pour l ingénieur
 Service Commun de Formation Continue Année Universitaire 2006-2007 Fonctions de plusieurs variables et applications pour l ingénieur Polycopié de cours Rédigé par Yannick Privat Bureau 321 - Institut Élie
Service Commun de Formation Continue Année Universitaire 2006-2007 Fonctions de plusieurs variables et applications pour l ingénieur Polycopié de cours Rédigé par Yannick Privat Bureau 321 - Institut Élie
Chapitre 2 : Caractéristiques du mouvement d un solide
 Chapitre 2 : Caractéristiques du mouvement d un solide I Rappels : Référentiel : Le mouvement d un corps est décris par rapport à un corps de référence et dépend du choix de ce corps. Ce corps de référence
Chapitre 2 : Caractéristiques du mouvement d un solide I Rappels : Référentiel : Le mouvement d un corps est décris par rapport à un corps de référence et dépend du choix de ce corps. Ce corps de référence
Sujet proposé par Yves M. LEROY. Cet examen se compose d un exercice et de deux problèmes. Ces trois parties sont indépendantes.
 Promotion X 004 COURS D ANALYSE DES STRUCTURES MÉCANIQUES PAR LA MÉTHODE DES ELEMENTS FINIS (MEC 568) contrôle non classant (7 mars 007, heures) Documents autorisés : polycopié ; documents et notes de
Promotion X 004 COURS D ANALYSE DES STRUCTURES MÉCANIQUES PAR LA MÉTHODE DES ELEMENTS FINIS (MEC 568) contrôle non classant (7 mars 007, heures) Documents autorisés : polycopié ; documents et notes de
Les correcteurs accorderont une importance particulière à la rigueur des raisonnements et aux représentations graphiques demandées.
 Les correcteurs accorderont une importance particulière à la rigueur des raisonnements et aux représentations graphiques demandées. 1 Ce sujet aborde le phénomène d instabilité dans des systèmes dynamiques
Les correcteurs accorderont une importance particulière à la rigueur des raisonnements et aux représentations graphiques demandées. 1 Ce sujet aborde le phénomène d instabilité dans des systèmes dynamiques
Algorithmes pour la planification de mouvements en robotique non-holonome
 Algorithmes pour la planification de mouvements en robotique non-holonome Frédéric Jean Unité de Mathématiques Appliquées ENSTA Le 02 février 2006 Outline 1 2 3 Modélisation Géométrique d un Robot Robot
Algorithmes pour la planification de mouvements en robotique non-holonome Frédéric Jean Unité de Mathématiques Appliquées ENSTA Le 02 février 2006 Outline 1 2 3 Modélisation Géométrique d un Robot Robot
Comparaison de fonctions Développements limités. Chapitre 10
 PCSI - 4/5 www.ericreynaud.fr Chapitre Points importants 3 Questions de cours 6 Eercices corrigés Plan du cours 4 Eercices types 7 Devoir maison 5 Eercices Chap Et s il ne fallait retenir que si points?
PCSI - 4/5 www.ericreynaud.fr Chapitre Points importants 3 Questions de cours 6 Eercices corrigés Plan du cours 4 Eercices types 7 Devoir maison 5 Eercices Chap Et s il ne fallait retenir que si points?
Master of Science en mathématiques 2015-2016
 Remarques liminaires : 1/9 Ce master à 90 ECTS (3 semestres) permet 2 orientations distinctes : - Un master général en mathématiques - Un master qui permet de choisir des mineurs en finance, statistique
Remarques liminaires : 1/9 Ce master à 90 ECTS (3 semestres) permet 2 orientations distinctes : - Un master général en mathématiques - Un master qui permet de choisir des mineurs en finance, statistique
Reconstruction de bâtiments en 3D à partir de nuages de points LIDAR
 Reconstruction de bâtiments en 3D à partir de nuages de points LIDAR Mickaël Bergem 25 juin 2014 Maillages et applications 1 Table des matières Introduction 3 1 La modélisation numérique de milieux urbains
Reconstruction de bâtiments en 3D à partir de nuages de points LIDAR Mickaël Bergem 25 juin 2014 Maillages et applications 1 Table des matières Introduction 3 1 La modélisation numérique de milieux urbains
Exercices - Fonctions de plusieurs variables : corrigé. Pour commencer
 Pour commencer Exercice 1 - Ensembles de définition - Première année - 1. Le logarithme est défini si x + y > 0. On trouve donc le demi-plan supérieur délimité par la droite d équation x + y = 0.. 1 xy
Pour commencer Exercice 1 - Ensembles de définition - Première année - 1. Le logarithme est défini si x + y > 0. On trouve donc le demi-plan supérieur délimité par la droite d équation x + y = 0.. 1 xy
Michel Henry Nicolas Delorme
 Michel Henry Nicolas Delorme Mécanique du point Cours + Exos Michel Henry Maître de conférences à l IUFM des Pays de Loire (Le Mans) Agrégé de physique Nicolas Delorme Maître de conférences à l université
Michel Henry Nicolas Delorme Mécanique du point Cours + Exos Michel Henry Maître de conférences à l IUFM des Pays de Loire (Le Mans) Agrégé de physique Nicolas Delorme Maître de conférences à l université
Dérivation : cours. Dérivation dans R
 TS Dérivation dans R Dans tout le capitre, f désigne une fonction définie sur un intervalle I de R (non vide et non réduit à un élément) et à valeurs dans R. Petits rappels de première Téorème-définition
TS Dérivation dans R Dans tout le capitre, f désigne une fonction définie sur un intervalle I de R (non vide et non réduit à un élément) et à valeurs dans R. Petits rappels de première Téorème-définition
Master of Science en mathématiques 2013-2014
 Remarques liminaires : 1 Ce master à (3 semestres) permet 2 orientations distinctes : 1) Un master général en mathématiques 2) Un master qui permet de choisir des mineurs en finance, statistique, informatique
Remarques liminaires : 1 Ce master à (3 semestres) permet 2 orientations distinctes : 1) Un master général en mathématiques 2) Un master qui permet de choisir des mineurs en finance, statistique, informatique
C f tracée ci- contre est la représentation graphique d une
 TLES1 DEVOIR A LA MAISON N 7 La courbe C f tracée ci- contre est la représentation graphique d une fonction f définie et dérivable sur R. On note f ' la fonction dérivée de f. La tangente T à la courbe
TLES1 DEVOIR A LA MAISON N 7 La courbe C f tracée ci- contre est la représentation graphique d une fonction f définie et dérivable sur R. On note f ' la fonction dérivée de f. La tangente T à la courbe
Simulation de variables aléatoires
 Chapter 1 Simulation de variables aléatoires Références: [F] Fishman, A first course in Monte Carlo, chap 3. [B] Bouleau, Probabilités de l ingénieur, chap 4. [R] Rubinstein, Simulation and Monte Carlo
Chapter 1 Simulation de variables aléatoires Références: [F] Fishman, A first course in Monte Carlo, chap 3. [B] Bouleau, Probabilités de l ingénieur, chap 4. [R] Rubinstein, Simulation and Monte Carlo
Modèles bi-dimensionnels de coques linéairement élastiques: Estimations de l écart entre leurs solutions.
 Problèmes mathématiques de la mécanique/mathematical problems in Mechanics Modèles bi-dimensionnels de coques linéairement élastiques: Estimations de l écart entre leurs solutions. Cristinel Mardare Laboratoire
Problèmes mathématiques de la mécanique/mathematical problems in Mechanics Modèles bi-dimensionnels de coques linéairement élastiques: Estimations de l écart entre leurs solutions. Cristinel Mardare Laboratoire
CCP PSI - 2010 Mathématiques 1 : un corrigé
 CCP PSI - 00 Mathématiques : un corrigé Première partie. Définition d une structure euclidienne sur R n [X]... B est clairement symétrique et linéaire par rapport à sa seconde variable. De plus B(P, P
CCP PSI - 00 Mathématiques : un corrigé Première partie. Définition d une structure euclidienne sur R n [X]... B est clairement symétrique et linéaire par rapport à sa seconde variable. De plus B(P, P
AOT 13. et Application au Contrôle Géométrique
 AOT 13 Géométrie Différentielle et Application au Contrôle Géométrique Frédéric Jean Notes de cours Édition 2011/2012 ii Table des matières 1 Variétés différentiables 1 1.1 Variétés différentiables............................
AOT 13 Géométrie Différentielle et Application au Contrôle Géométrique Frédéric Jean Notes de cours Édition 2011/2012 ii Table des matières 1 Variétés différentiables 1 1.1 Variétés différentiables............................
Hervé Oudin. HAL Id: cel-00341772 https://cel.archives-ouvertes.fr/cel-00341772v1
 Méthode des éléments finis Hervé Oudin To cite this version: Hervé Oudin. Méthode des éléments finis. École d ingénieur. Ecole Centrale de Nantes, 2008, pp.63. HAL Id: cel-00341772 https://cel.archives-ouvertes.fr/cel-00341772v1
Méthode des éléments finis Hervé Oudin To cite this version: Hervé Oudin. Méthode des éléments finis. École d ingénieur. Ecole Centrale de Nantes, 2008, pp.63. HAL Id: cel-00341772 https://cel.archives-ouvertes.fr/cel-00341772v1
Chapitre 0 Introduction à la cinématique
 Chapitre 0 Introduction à la cinématique Plan Vitesse, accélération Coordonnées polaires Exercices corrigés Vitesse, Accélération La cinématique est l étude du mouvement Elle suppose donc l existence à
Chapitre 0 Introduction à la cinématique Plan Vitesse, accélération Coordonnées polaires Exercices corrigés Vitesse, Accélération La cinématique est l étude du mouvement Elle suppose donc l existence à
Fonctions de plusieurs variables, intégrales multiples, et intégrales dépendant d un paramètre
 IUFM du Limousin 2009-10 PLC1 Mathématiques S. Vinatier Rappels de cours Fonctions de plusieurs variables, intégrales multiples, et intégrales dépendant d un paramètre 1 Fonctions de plusieurs variables
IUFM du Limousin 2009-10 PLC1 Mathématiques S. Vinatier Rappels de cours Fonctions de plusieurs variables, intégrales multiples, et intégrales dépendant d un paramètre 1 Fonctions de plusieurs variables
Calcul différentiel sur R n Première partie
 Calcul différentiel sur R n Première partie Université De Metz 2006-2007 1 Définitions générales On note L(R n, R m ) l espace vectoriel des applications linéaires de R n dans R m. Définition 1.1 (différentiabilité
Calcul différentiel sur R n Première partie Université De Metz 2006-2007 1 Définitions générales On note L(R n, R m ) l espace vectoriel des applications linéaires de R n dans R m. Définition 1.1 (différentiabilité
Fonctions de plusieurs variables
 UNIVERSITÉ DE POITIERS Parcours Renforcé Première Année 2009/2010 Paul Broussous Fonctions de plusieurs variables Seconde version corrigée Table des matières 1. Un peu de topologie. 1.1. Distance euclidienne,
UNIVERSITÉ DE POITIERS Parcours Renforcé Première Année 2009/2010 Paul Broussous Fonctions de plusieurs variables Seconde version corrigée Table des matières 1. Un peu de topologie. 1.1. Distance euclidienne,
Baccalauréat ES Polynésie (spécialité) 10 septembre 2014 Corrigé
 10 septembre 2014 Corrigé") Baccalauréat ES Polynésie (spécialité) 10 septembre 2014 Corrigé A. P. M. E. P. Exercice 1 5 points 1. Réponse d. : 1 e Le coefficient directeur de la tangente est négatif et n est manifestement pas 2e
Baccalauréat ES Polynésie (spécialité) 10 septembre 2014 Corrigé A. P. M. E. P. Exercice 1 5 points 1. Réponse d. : 1 e Le coefficient directeur de la tangente est négatif et n est manifestement pas 2e
Implémentation de Nouveaux Elements Finis dans Life et Applications
 1 Département Informatique et Mathématiques Appliquées Année Universitaire 29-21 Rapport de stage Implémentation de Nouveaux Elements Finis dans Life et Applications Présenté par Abdoulaye Samake M1 Mathématiques
1 Département Informatique et Mathématiques Appliquées Année Universitaire 29-21 Rapport de stage Implémentation de Nouveaux Elements Finis dans Life et Applications Présenté par Abdoulaye Samake M1 Mathématiques
Formes quadratiques. 1 Formes quadratiques et formes polaires associées. Imen BHOURI. 1.1 Définitions
 Formes quadratiques Imen BHOURI 1 Ce cours s adresse aux étudiants de niveau deuxième année de Licence et à ceux qui préparent le capes. Il combine d une façon indissociable l étude des concepts bilinéaires
Formes quadratiques Imen BHOURI 1 Ce cours s adresse aux étudiants de niveau deuxième année de Licence et à ceux qui préparent le capes. Il combine d une façon indissociable l étude des concepts bilinéaires
Chapitre 3. Quelques fonctions usuelles. 1 Fonctions logarithme et exponentielle. 1.1 La fonction logarithme
 Chapitre 3 Quelques fonctions usuelles 1 Fonctions logarithme et eponentielle 1.1 La fonction logarithme Définition 1.1 La fonction 7! 1/ est continue sur ]0, +1[. Elle admet donc des primitives sur cet
Chapitre 3 Quelques fonctions usuelles 1 Fonctions logarithme et eponentielle 1.1 La fonction logarithme Définition 1.1 La fonction 7! 1/ est continue sur ]0, +1[. Elle admet donc des primitives sur cet
Modélisation géostatistique des débits le long des cours d eau.
 Modélisation géostatistique des débits le long des cours d eau. C. Bernard-Michel (actuellement à ) & C. de Fouquet MISTIS, INRIA Rhône-Alpes. 655 avenue de l Europe, 38334 SAINT ISMIER Cedex. Ecole des
Modélisation géostatistique des débits le long des cours d eau. C. Bernard-Michel (actuellement à ) & C. de Fouquet MISTIS, INRIA Rhône-Alpes. 655 avenue de l Europe, 38334 SAINT ISMIER Cedex. Ecole des
Chapitre. Chapitre 12. Fonctions de plusieurs variables. 1. Fonctions à valeurs réelles. 1.1 Définition. 1.2 Calcul de dérivées partielles
 1 Chapitre Chapitre 1. Fonctions e plusieurs variables La TI-Nspire CAS permet e manipuler très simplement les onctions e plusieurs variables. Nous allons voir ans ce chapitre comment procéer, et éinir
1 Chapitre Chapitre 1. Fonctions e plusieurs variables La TI-Nspire CAS permet e manipuler très simplement les onctions e plusieurs variables. Nous allons voir ans ce chapitre comment procéer, et éinir
Etat de l art de la Reconnaissance de Visage.
 Chapitre 2 2.1 Introduction De nos jours, il existe des ordinateurs capables d effectuer des tâches faites par l homme, qui demandent de l intelligence. Malgré tout ce progrès, la machine est toujours
Chapitre 2 2.1 Introduction De nos jours, il existe des ordinateurs capables d effectuer des tâches faites par l homme, qui demandent de l intelligence. Malgré tout ce progrès, la machine est toujours
Optimisation et programmation mathématique. Professeur Michel de Mathelin. Cours intégré : 20 h
 Télécom Physique Strasbourg Master IRIV Optimisation et programmation mathématique Professeur Michel de Mathelin Cours intégré : 20 h Programme du cours d optimisation Introduction Chapitre I: Rappels
Télécom Physique Strasbourg Master IRIV Optimisation et programmation mathématique Professeur Michel de Mathelin Cours intégré : 20 h Programme du cours d optimisation Introduction Chapitre I: Rappels
Python - introduction à la programmation et calcul scientifique
 Université de Strasbourg Environnements Informatique Python - introduction à la programmation et calcul scientifique Feuille de TP 1 Avant de commencer Le but de ce TP est de vous montrer les bases de
Université de Strasbourg Environnements Informatique Python - introduction à la programmation et calcul scientifique Feuille de TP 1 Avant de commencer Le but de ce TP est de vous montrer les bases de
1S Modèles de rédaction Enoncés
 Par l équipe des professeurs de 1S du lycée Parc de Vilgénis 1S Modèles de rédaction Enoncés Produit scalaire & Corrigés Exercice 1 : définition du produit scalaire Soit ABC un triangle tel que AB, AC
Par l équipe des professeurs de 1S du lycée Parc de Vilgénis 1S Modèles de rédaction Enoncés Produit scalaire & Corrigés Exercice 1 : définition du produit scalaire Soit ABC un triangle tel que AB, AC
Exprimer ce coefficient de proportionnalité sous forme de pourcentage : 3,5 %
 23 CALCUL DE L INTÉRÊT Tau d intérêt Paul et Rémi ont reçu pour Noël, respectivement, 20 et 80. Ils placent cet argent dans une banque, au même tau. Au bout d une année, ce placement leur rapportera une
23 CALCUL DE L INTÉRÊT Tau d intérêt Paul et Rémi ont reçu pour Noël, respectivement, 20 et 80. Ils placent cet argent dans une banque, au même tau. Au bout d une année, ce placement leur rapportera une
I - PUISSANCE D UN POINT PAR RAPPORT A UN CERCLE CERCLES ORTHOGONAUX POLES ET POLAIRES
 I - PUISSANCE D UN POINT PAR RAPPORT A UN CERCLE CERCLES ORTHOGONAUX POLES ET POLAIRES Théorème - Définition Soit un cercle (O,R) et un point. Une droite passant par coupe le cercle en deux points A et
I - PUISSANCE D UN POINT PAR RAPPORT A UN CERCLE CERCLES ORTHOGONAUX POLES ET POLAIRES Théorème - Définition Soit un cercle (O,R) et un point. Une droite passant par coupe le cercle en deux points A et
Calcul Différentiel. I Fonctions différentiables 3
 Université de la Méditerranée Faculté des Sciences de Luminy Licence de Mathématiques, Semestre 5, année 2008-2009 Calcul Différentiel Support du cours de Glenn Merlet 1, version du 6 octobre 2008. Remarques
Université de la Méditerranée Faculté des Sciences de Luminy Licence de Mathématiques, Semestre 5, année 2008-2009 Calcul Différentiel Support du cours de Glenn Merlet 1, version du 6 octobre 2008. Remarques
= 1 si n = m& où n et m sont souvent des indices entiers, par exemple, n, m = 0, 1, 2, 3, 4... En fait,! n m
 1 épartement de Physique, Université Laval, Québec Pierre Amiot, 1. La fonction delta et certaines de ses utilisations. Clientèle Ce texte est destiné aux physiciens, ingénieurs et autres scientifiques.
1 épartement de Physique, Université Laval, Québec Pierre Amiot, 1. La fonction delta et certaines de ses utilisations. Clientèle Ce texte est destiné aux physiciens, ingénieurs et autres scientifiques.
Fonctions de plusieurs variables. Sébastien Tordeux
 Fonctions de plusieurs variables Sébastien Tordeux 22 février 2009 Table des matières 1 Fonctions de plusieurs variables 3 1.1 Définition............................. 3 1.2 Limite et continuité.......................
Fonctions de plusieurs variables Sébastien Tordeux 22 février 2009 Table des matières 1 Fonctions de plusieurs variables 3 1.1 Définition............................. 3 1.2 Limite et continuité.......................
Filtrage stochastique non linéaire par la théorie de représentation des martingales
 Filtrage stochastique non linéaire par la théorie de représentation des martingales Adriana Climescu-Haulica Laboratoire de Modélisation et Calcul Institut d Informatique et Mathématiques Appliquées de
Filtrage stochastique non linéaire par la théorie de représentation des martingales Adriana Climescu-Haulica Laboratoire de Modélisation et Calcul Institut d Informatique et Mathématiques Appliquées de
Etude de fonctions: procédure et exemple
 Etude de fonctions: procédure et exemple Yves Delhaye 8 juillet 2007 Résumé Dans ce court travail, nous présentons les différentes étapes d une étude de fonction à travers un exemple. Nous nous limitons
Etude de fonctions: procédure et exemple Yves Delhaye 8 juillet 2007 Résumé Dans ce court travail, nous présentons les différentes étapes d une étude de fonction à travers un exemple. Nous nous limitons
Introduction au datamining
 Introduction au datamining Patrick Naïm janvier 2005 Définition Définition Historique Mot utilisé au départ par les statisticiens Le mot indiquait une utilisation intensive des données conduisant à des
Introduction au datamining Patrick Naïm janvier 2005 Définition Définition Historique Mot utilisé au départ par les statisticiens Le mot indiquait une utilisation intensive des données conduisant à des
STATIQUE GRAPHIQUE ET STATIQUE ANALYTIQUE
 ÉCOLE D'INGÉNIEURS DE FRIBOURG (E.I.F.) SECTION DE MÉCANIQUE G.R. Nicolet, revu en 2006 STATIQUE GRAPHIQUE ET STATIQUE ANALYTIQUE Eléments de calcul vectoriel Opérations avec les forces Equilibre du point
ÉCOLE D'INGÉNIEURS DE FRIBOURG (E.I.F.) SECTION DE MÉCANIQUE G.R. Nicolet, revu en 2006 STATIQUE GRAPHIQUE ET STATIQUE ANALYTIQUE Eléments de calcul vectoriel Opérations avec les forces Equilibre du point
Quelques contrôle de Première S
 Quelques contrôle de Première S Gilles Auriol [email protected] http ://auriolg.free.fr Voici l énoncé de 7 devoirs de Première S, intégralement corrigés. Malgré tout les devoirs et 5 nécessitent l usage
Quelques contrôle de Première S Gilles Auriol [email protected] http ://auriolg.free.fr Voici l énoncé de 7 devoirs de Première S, intégralement corrigés. Malgré tout les devoirs et 5 nécessitent l usage
La Licence Mathématiques et Economie-MASS Université de Sciences Sociales de Toulouse 1
 La Licence Mathématiques et Economie-MASS Université de Sciences Sociales de Toulouse 1 La licence Mathématiques et Economie-MASS de l Université des Sciences Sociales de Toulouse propose sur les trois
La Licence Mathématiques et Economie-MASS Université de Sciences Sociales de Toulouse 1 La licence Mathématiques et Economie-MASS de l Université des Sciences Sociales de Toulouse propose sur les trois
aux différences est appelé équation aux différences d ordre n en forme normale.
 MODÉLISATION ET SIMULATION EQUATIONS AUX DIFFÉRENCES (I/II) 1. Rappels théoriques : résolution d équations aux différences 1.1. Équations aux différences. Définition. Soit x k = x(k) X l état scalaire
MODÉLISATION ET SIMULATION EQUATIONS AUX DIFFÉRENCES (I/II) 1. Rappels théoriques : résolution d équations aux différences 1.1. Équations aux différences. Définition. Soit x k = x(k) X l état scalaire
Hervé Oudin. HAL Id: cel-00341772 https://cel.archives-ouvertes.fr/cel-00341772v3
 Méthode des éléments finis Hervé Oudin To cite this version: Hervé Oudin. Méthode des éléments finis. École d ingénieur. Nantes, France. 2008, pp.74. HAL Id: cel-00341772 https://cel.archives-ouvertes.fr/cel-00341772v3
Méthode des éléments finis Hervé Oudin To cite this version: Hervé Oudin. Méthode des éléments finis. École d ingénieur. Nantes, France. 2008, pp.74. HAL Id: cel-00341772 https://cel.archives-ouvertes.fr/cel-00341772v3
ce n est pas un livre auto-suffisant (il est loin d être exhaustif )!
!") L MASS 1/13 Aide-mémoire et exercices corrigés. USTV MS41 Optimisation I Table des matières 1 Fonctions de plusieurs variables 3 Limites et continuité 13 3 Dérivabilité et différentiabilité, fonctions
L MASS 1/13 Aide-mémoire et exercices corrigés. USTV MS41 Optimisation I Table des matières 1 Fonctions de plusieurs variables 3 Limites et continuité 13 3 Dérivabilité et différentiabilité, fonctions
Mathématique et Automatique : de la boucle ouverte à la boucle fermée. Maïtine bergounioux Laboratoire MAPMO - UMR 6628 Université d'orléans
 Mathématique et Automatique : de la boucle ouverte à la boucle fermée Maïtine bergounioux Laboratoire MAPMO - UMR 6628 Université d'orléans [email protected] Plan 1. Un peu de
Mathématique et Automatique : de la boucle ouverte à la boucle fermée Maïtine bergounioux Laboratoire MAPMO - UMR 6628 Université d'orléans [email protected] Plan 1. Un peu de
Cours 7 : Utilisation de modules sous python
 Cours 7 : Utilisation de modules sous python 2013/2014 Utilisation d un module Importer un module Exemple : le module random Importer un module Exemple : le module random Importer un module Un module est
Cours 7 : Utilisation de modules sous python 2013/2014 Utilisation d un module Importer un module Exemple : le module random Importer un module Exemple : le module random Importer un module Un module est
Exercices et corrigés Mathématique générale Version β
 Université libre de Bruxelles Années académiques 2008-2050 Université catholique de Louvain Exercices et corrigés Mathématique générale Version β Laurent Claessens Nicolas Richard Dernière modification
Université libre de Bruxelles Années académiques 2008-2050 Université catholique de Louvain Exercices et corrigés Mathématique générale Version β Laurent Claessens Nicolas Richard Dernière modification
Dérivation : Résumé de cours et méthodes
 Dérivation : Résumé de cours et métodes Nombre dérivé - Fonction dérivée : DÉFINITION (a + ) (a) Etant donné est une onction déinie sur un intervalle I contenant le réel a, est dérivable en a si tend vers
Dérivation : Résumé de cours et métodes Nombre dérivé - Fonction dérivée : DÉFINITION (a + ) (a) Etant donné est une onction déinie sur un intervalle I contenant le réel a, est dérivable en a si tend vers
Chapitre 4: Dérivée d'une fonction et règles de calcul
 DERIVEES ET REGLES DE CALCULS 69 Chapitre 4: Dérivée d'une fonction et règles de calcul Prérequis: Généralités sur les fonctions, Introduction dérivée Requis pour: Croissance, Optimisation, Études de fct.
DERIVEES ET REGLES DE CALCULS 69 Chapitre 4: Dérivée d'une fonction et règles de calcul Prérequis: Généralités sur les fonctions, Introduction dérivée Requis pour: Croissance, Optimisation, Études de fct.
L ANALYSE EN COMPOSANTES PRINCIPALES (A.C.P.) Pierre-Louis GONZALEZ
 Pierre-Louis GONZALEZ") L ANALYSE EN COMPOSANTES PRINCIPALES (A.C.P.) Pierre-Louis GONZALEZ INTRODUCTION Données : n individus observés sur p variables quantitatives. L A.C.P. permet d eplorer les liaisons entre variables et
L ANALYSE EN COMPOSANTES PRINCIPALES (A.C.P.) Pierre-Louis GONZALEZ INTRODUCTION Données : n individus observés sur p variables quantitatives. L A.C.P. permet d eplorer les liaisons entre variables et
Chafa Azzedine - Faculté de Physique U.S.T.H.B 1
 Chafa Azzedine - Faculté de Physique U.S.T.H.B 1 Définition: La cinématique est une branche de la mécanique qui étudie les mouements des corps dans l espace en fonction du temps indépendamment des causes
Chafa Azzedine - Faculté de Physique U.S.T.H.B 1 Définition: La cinématique est une branche de la mécanique qui étudie les mouements des corps dans l espace en fonction du temps indépendamment des causes
* très facile ** facile *** difficulté moyenne **** difficile ***** très difficile I : Incontournable
 Eo7 Fonctions de plusieurs variables Eercices de Jean-Louis Rouget Retrouver aussi cette fiche sur wwwmaths-francefr * très facile ** facile *** difficulté moenne **** difficile ***** très difficile I
Eo7 Fonctions de plusieurs variables Eercices de Jean-Louis Rouget Retrouver aussi cette fiche sur wwwmaths-francefr * très facile ** facile *** difficulté moenne **** difficile ***** très difficile I
Chapitre VI Fonctions de plusieurs variables
 Chapitre VI Fonctions de plusieurs variables 6. 1 Fonctions différentiables de R 2 dans R. 6. 1. 1 Définition de la différentiabilité Nous introduisons la différentiabilité sous l angle des développements
Chapitre VI Fonctions de plusieurs variables 6. 1 Fonctions différentiables de R 2 dans R. 6. 1. 1 Définition de la différentiabilité Nous introduisons la différentiabilité sous l angle des développements
Théorème du point fixe - Théorème de l inversion locale
 Chapitre 7 Théorème du point fixe - Théorème de l inversion locale Dans ce chapitre et le suivant, on montre deux applications importantes de la notion de différentiabilité : le théorème de l inversion
Chapitre 7 Théorème du point fixe - Théorème de l inversion locale Dans ce chapitre et le suivant, on montre deux applications importantes de la notion de différentiabilité : le théorème de l inversion
BACCALAURÉAT GÉNÉRAL SESSION 2012 OBLIGATOIRE MATHÉMATIQUES. Série S. Durée de l épreuve : 4 heures Coefficient : 7 ENSEIGNEMENT OBLIGATOIRE
 BACCALAURÉAT GÉNÉRAL SESSION 2012 MATHÉMATIQUES Série S Durée de l épreuve : 4 heures Coefficient : 7 ENSEIGNEMENT OBLIGATOIRE Les calculatrices électroniques de poche sont autorisées, conformément à la
BACCALAURÉAT GÉNÉRAL SESSION 2012 MATHÉMATIQUES Série S Durée de l épreuve : 4 heures Coefficient : 7 ENSEIGNEMENT OBLIGATOIRE Les calculatrices électroniques de poche sont autorisées, conformément à la
Les travaux doivent être remis sous forme papier.
 Physique mathématique II Calendrier: Date Pondération/note nale Matériel couvert ExercicesSérie 1 : 25 septembre 2014 5% RH&B: Ch. 3 ExercicesSérie 2 : 23 octobre 2014 5% RH&B: Ch. 12-13 Examen 1 : 24
Physique mathématique II Calendrier: Date Pondération/note nale Matériel couvert ExercicesSérie 1 : 25 septembre 2014 5% RH&B: Ch. 3 ExercicesSérie 2 : 23 octobre 2014 5% RH&B: Ch. 12-13 Examen 1 : 24
Chapitre 6. Fonction réelle d une variable réelle
 Chapitre 6 Fonction réelle d une variable réelle 6. Généralités et plan d étude Une application de I dans R est une correspondance entre les éléments de I et ceu de R telle que tout élément de I admette
Chapitre 6 Fonction réelle d une variable réelle 6. Généralités et plan d étude Une application de I dans R est une correspondance entre les éléments de I et ceu de R telle que tout élément de I admette
Examen optimisation Centrale Marseille (2008) et SupGalilee (2008)
 et SupGalilee (2008)") Examen optimisation Centrale Marseille (28) et SupGalilee (28) Olivier Latte, Jean-Michel Innocent, Isabelle Terrasse, Emmanuel Audusse, Francois Cuvelier duree 4 h Tout resultat enonce dans le texte peut
Examen optimisation Centrale Marseille (28) et SupGalilee (28) Olivier Latte, Jean-Michel Innocent, Isabelle Terrasse, Emmanuel Audusse, Francois Cuvelier duree 4 h Tout resultat enonce dans le texte peut