Chapitre trois : Cinématique
|
|
|
- Yves Cantin
- il y a 8 ans
- Total affichages :
Transcription
1 Chapitre trois : Cinématique 3.1 Objet de la cinématique 3.2 Le temps et l espace 3.3 La trajectoire 3.4 Le vecteur-position et vecteur-vitesse 3.5 Le vecteur-accélération 3.6 Composantes du vecteur-vitesse et accélération en coordonnées cartésiennes 3.7 Composantes du vecteur-vitesse et accélération en coordonnées polaires 3.8 Composantes du vecteur-vitesse et accélération en coordonnées cylindriques 3.9 Composantes du vecteur-vitesse et accélération en coordonnées sphériques 3.10 Exemples de mouvements 3.1 Objet de la cinématique La cinématique : est l étude des mouvements d un corps indépendamment de toutes causes capables de le provoquer ou de le modifier. La dynamique établit les relations ente les causes du mouvement et leurs effets. 3.2 Le temps et l espace Un repère : c est un ensemble de points rigidement liés les uns aux autres permettant de définir un repérage de l espace Un référentiel (R) : il est composé d un repère et d une horloge permettant de définir un repérage des instants ou des durées 3.3 La trajectoire C est généralement une courbe et le mobile peut être repéré de différentes manières : par rapport à une origine fixe O par un vecteur-position (rayon-vecteur) 1/25


2 par rapport à un repère orthonormé quelconque Oxyz 2/25

3 3/25

4 4/25
 Si on fait tendre δt vers")
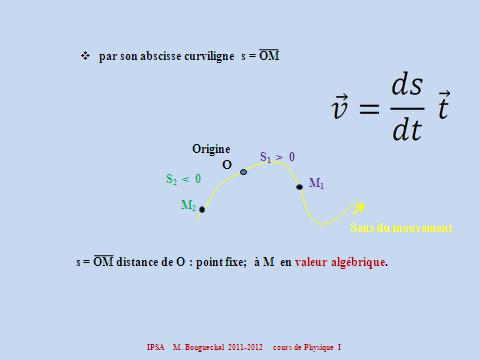
5 3.4 Vecteur-position et vecteur-vitesse Déterminons la variation du rayon vecteur entre t et t. Le vecteur-vitesse moyenne est égale à la variation du vecteur OM divisé par l intervalle de temps (t -t) Si on fait tendre δt vers zéro, on obtient la vitesse instantanée. 5/25
![[v] = LT -1 est tangent à la trajectoire si M tend vers M c'est-à-dire soit : Le vecteur vitesse est toujours tangent à la trajectoire.](/docs-images/69/60215677/images/6-0.jpg "On peut donc écrire :, ( vecteur unitaire et tangent à la trajectoire). a même direction et sens que 3.5 Le vecteur-accélération 6/25")
6 [v] = LT -1 est tangent à la trajectoire si M tend vers M c'est-à-dire soit : Le vecteur vitesse est toujours tangent à la trajectoire. On peut donc écrire :, ( vecteur unitaire et tangent à la trajectoire). a même direction et sens que 3.5 Le vecteur-accélération 6/25
7 On définit le vecteur-accélération moyen par : et le vecteur-accélération instantanée par : C est la dérivée du vecteur vitesse. [a] = LT -2 Attention : Ne pas confondre dx 2 = dx. dx infiniment petit au carré : c est un carré, dimension de x au carré. d² x = d(dx) infiniment petit du 2 ordre : c est la dimension de x. d(x 2 )= 2x. dx dimension de x au carré. 3.6 Composantes des vecteurs-vitesse et accélération en coordonnées cartésiennes 7/25

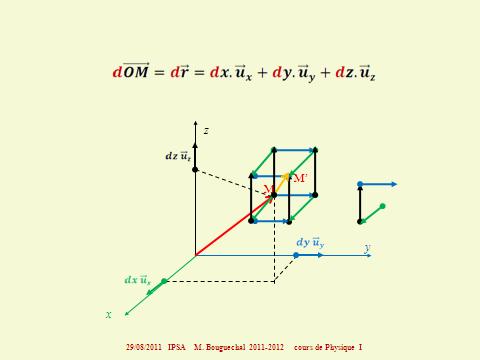
8 Les coordonnées cartésiennes du point M sont (x,y,z) Vecteur position (rayon vecteur) Le vecteur-position est donnée par : La base est Les vecteurs de base ne changent pas de direction ni de sens, ni de norme au cours du temps. Leurs dérivées par rapport au temps sont nulles. Elément de longueur L élément de longueur peut s écrire : 8/25

9 9/25
10 Elément de volume L élément de volume est donné par : Calculons le volume d un parallélépipède de coté a, b et c en faisant varier x de 0 à a y de 0 à b et finalement z de 0 à c en utilisant l élément de volume on obtient alors : Vecteur-vitesse 10/25
11 Vecteur-accélération Le vecteur-accélération est donné par : 11/25
 La base est : avec")
12 3.7 Composantes des vecteurs-vitesse et accélération en coordonnées polaires Les coordonnées polaires de M sont : Vecteur position (rayon vecteur) La base est : avec 12/25

13 ; ;, en général n est pas tangent à la trajectoire. La base est une base mobile, changent de direction au cours du temps. Passage en coordonnées cartésiennes Le passage des coordonnées polaires aux coordonnées cartésiennes se fait en projetant le point M sur les axes. On peut aussi passer des coordonnées cartésiennes aux coordonnées polaires. 13/25
14 Vecteur-vitesse Rappel mathématique : Comment dériver un vecteur unitaire tournant (variable)? Quand on dérive un vecteur unitaire par rapport à son angle polaireθ, on obtient un vecteur unitaire perpendiculaire au premier. 14/25

15 Vecteur-accélération Rappel mathématique : Comment dériver un produit de trois fonctions? 15/25

16 Elément de longueur Elément de surface 16/25
17 Calculons le volume d un disque de rayon R, en faisant varier r de 0 à R et θ de 0 à 2π. En utilisant l élément de volume on obtient alors : 3.8 Composantes des vecteurs-vitesse et accélération en coordonnées cylindriques Les coordonnées cylindriques du point M sont 17/25
18 Les trois coordonnées n ont pas la même dimension. La base est : mobile. sont des vecteurs variables ; ils varient au cours du temps suivant la position du est un vecteur constant, il conserve la même direction et le même sens quelque soit la position du mobile. Vecteur position (rayon vecteur) Si M subit une variation infiniment petite qui le fait passer de M à M, alors, respectivement de à + d ; de à + d et z à z + dz M(,,z) M ( + d, + d, z + dz) Déterminons le vecteur-vitesse. et z varient Vecteur-vitesse 18/25

19 Vecteur Accélération Passage en coordonnées cartésiennes 19/25
20 On peut alors déterminer les composantes cartésiennes de la vitesse en fonction des coordonnées cylindriques. Eléments de longueur 20/25
21 z z M M IPSA M. Bouguechal cours de Physique I 22 Elément de surface Elément de volume 21/25

 = R z=0 OM = Ru + 0u z du = du d = (-u ) du = du d = (-u ) dt d dt dt d dt V = R u = R u a = R u -")
22 Calculons le volume d un cylindre de rayon R et de hauteur h. En utilisant l élément de volume en intégrant ρ de 0 à R, z de 0 à h et θ de 0 à 2π, on balaie le cylindre de rayon a et de hauteur h. Exemple : (t) = R z=0 OM = Ru + 0u z du = du d = (-u ) du = du d = (-u ) dt d dt dt d dt V = R u = R u a = R u - R ²u accélération centripète normale accélération tangentielle si le mouvement est uniforme = = cst a = -R ²u = -R ²u = -v²/r (car v = R ) 22/25
23 formule de passage des coordonnées cylindrique ( ; ; z) aux coordonnées cartésiennes x = cos y = sin z = z z z=z M O k y = sin y x = cos i j x v x = dx = cos - dt v y = dy = sin + dt v z = z sin cos v = v x ² + v y ² + v z ² = ² + ( )² + z ² 3.9 Composantes des vecteurs-vitesse et accélération en coordonnées sphériques 23/25
![M(r ; ; ) r 0 0 2 0 base (U r ;U ;U ) dv=(rd )(dr)(rsin d ) dv = r²sin drd d soit une sphère de rayon R calculons son volume v v= R r=0 =0 2 =0 r²sin drd d v= R r=0 r²dr =0 sin d 2 =0 d v=[r 3 ] r 0](/docs-images/69/60215677/images/24-0.jpg "[-cos ] 0 [ ] 2 0 = R 3 2 2 = 4 R 3 [ 3] 3 3 OM = ru r dl = MM = dru r + rd u +rsin d u élément de longueur en coordonnée sphérique vitesse v = dl = MM = dom dt dt dt v = r * u r + r * u + rsin * u")
24 M(r ; ; ) r base (U r ;U ;U ) dv=(rd )(dr)(rsin d ) dv = r²sin drd d soit une sphère de rayon R calculons son volume v v= R r=0 =0 2 =0 r²sin drd d v= R r=0 r²dr =0 sin d 2 =0 d v=[r 3 ] r 0 [-cos ] 0 [ ] 2 0 = R = 4 R 3 [ 3] 3 3 OM = ru r dl = MM = dru r + rd u +rsin d u élément de longueur en coordonnée sphérique vitesse v = dl = MM = dom dt dt dt v = r * u r + r * u + rsin * u (la dérivé de u r ne donne pas u car l angle polaire de u r n est pas connu et la variation de u r se fait dans l espace) 24/25
25 Relations avec les coordonnées cartésiennes x = rsin cos y = rsin sin z = rcos v x = r * sin cos + r * cos cos - r * sin sin v y = r * sin sin + r * cos sin + r * sin cos v z = r * cos - r * sin 3.10 Exemples de mouvements Un point M décrit une hélice circulaire d axe oz. Son mouvement est donné par : x = acos y = asin z =h a : rayon du cylindre de révolution sur lequel est tracé l hélice h : une constante z h=2 h /2 a a y x x=a x=0 x=a =0 y=0 = /2 y=a =2 y=0 z=0 z=h /2 z=2h à chaque tour on monte de 2 a) déterminer le vecteur position en coordonnée cylindrique OM = OH + HM = au r + h u z b) déterminer le vecteur vitesse et sa norme en coordonnée cylindrique v = a * u + h * u z v = ((a * u )² + (h * u z )²) 1/2 25/25
26 c) déterminer le vecteur accélération et sa norme en coordonnée cylindrique a = a ** u -a * ²u r + h ** u z a = -a * ²u r + a ** u + h ** u z d) Que deviennent les formules si le mouvement est uniforme? 26/25
 ds 1 ds 2 ds 3 dy.dz dx.dz dx.dy Variation élémentaire du vecteur position dl d OM MM ' OM ' Volume élémentaire : OM dv dx. dy. dz Vecteur position OM r 27/25")
27 Coordonnées cartésiennes Coordonnées d un point M M(x,y,z) x : abscisse y : ordonnée z : côte Vecteurs de base ( i, j, k ) ou ( u x, u y, u z ) Eléments de base dx dy Dz Eléments de surface ( 3 faces ) ds 1 ds 2 ds 3 dy.dz dx.dz dx.dy Variation élémentaire du vecteur position dl d OM MM ' OM ' Volume élémentaire : OM dv dx. dy. dz Vecteur position OM r 27/25
Repérage d un point - Vitesse et
 PSI - écanique I - Repérage d un point - Vitesse et accélération page 1/6 Repérage d un point - Vitesse et accélération Table des matières 1 Espace et temps - Référentiel d observation 1 2 Coordonnées
PSI - écanique I - Repérage d un point - Vitesse et accélération page 1/6 Repérage d un point - Vitesse et accélération Table des matières 1 Espace et temps - Référentiel d observation 1 2 Coordonnées
Chapitre 1 Cinématique du point matériel
 Chapitre 1 Cinématique du point matériel 7 1.1. Introduction 1.1.1. Domaine d étude Le programme de mécanique de math sup se limite à l étude de la mécanique classique. Sont exclus : la relativité et la
Chapitre 1 Cinématique du point matériel 7 1.1. Introduction 1.1.1. Domaine d étude Le programme de mécanique de math sup se limite à l étude de la mécanique classique. Sont exclus : la relativité et la
Chafa Azzedine - Faculté de Physique U.S.T.H.B 1
 Chafa Azzedine - Faculté de Physique U.S.T.H.B 1 Définition: La cinématique est une branche de la mécanique qui étudie les mouements des corps dans l espace en fonction du temps indépendamment des causes
Chafa Azzedine - Faculté de Physique U.S.T.H.B 1 Définition: La cinématique est une branche de la mécanique qui étudie les mouements des corps dans l espace en fonction du temps indépendamment des causes
Cours de Mécanique du point matériel
 Cours de Mécanique du point matériel SMPC1 Module 1 : Mécanique 1 Session : Automne 2014 Prof. M. EL BAZ Cours de Mécanique du Point matériel Chapitre 1 : Complément Mathématique SMPC1 Chapitre 1: Rappels
Cours de Mécanique du point matériel SMPC1 Module 1 : Mécanique 1 Session : Automne 2014 Prof. M. EL BAZ Cours de Mécanique du Point matériel Chapitre 1 : Complément Mathématique SMPC1 Chapitre 1: Rappels
Calcul intégral élémentaire en plusieurs variables
 Calcul intégral élémentaire en plusieurs variables PC*2 2 septembre 2009 Avant-propos À part le théorème de Fubini qui sera démontré dans le cours sur les intégrales à paramètres et qui ne semble pas explicitement
Calcul intégral élémentaire en plusieurs variables PC*2 2 septembre 2009 Avant-propos À part le théorème de Fubini qui sera démontré dans le cours sur les intégrales à paramètres et qui ne semble pas explicitement
Chapitre 0 Introduction à la cinématique
 Chapitre 0 Introduction à la cinématique Plan Vitesse, accélération Coordonnées polaires Exercices corrigés Vitesse, Accélération La cinématique est l étude du mouvement Elle suppose donc l existence à
Chapitre 0 Introduction à la cinématique Plan Vitesse, accélération Coordonnées polaires Exercices corrigés Vitesse, Accélération La cinématique est l étude du mouvement Elle suppose donc l existence à
Intégrales doubles et triples - M
 Intégrales s et - [email protected] 1/27 - Intégrales (rappel) Rappels Approximation éfinition : Intégrale définie Soit f définie continue sur I = [a, b] telle que f (x) > 3 2.5 2 1.5 1.5.5 1 1.5
Intégrales s et - [email protected] 1/27 - Intégrales (rappel) Rappels Approximation éfinition : Intégrale définie Soit f définie continue sur I = [a, b] telle que f (x) > 3 2.5 2 1.5 1.5.5 1 1.5
Michel Henry Nicolas Delorme
 Michel Henry Nicolas Delorme Mécanique du point Cours + Exos Michel Henry Maître de conférences à l IUFM des Pays de Loire (Le Mans) Agrégé de physique Nicolas Delorme Maître de conférences à l université
Michel Henry Nicolas Delorme Mécanique du point Cours + Exos Michel Henry Maître de conférences à l IUFM des Pays de Loire (Le Mans) Agrégé de physique Nicolas Delorme Maître de conférences à l université
Angles orientés et fonctions circulaires ( En première S )
") Angles orientés et fonctions circulaires ( En première S ) Dernière mise à jour : Jeudi 01 Septembre 010 Vincent OBATON, Enseignant au lycée Stendhal de Grenoble (Année 006-007) Lycée Stendhal, Grenoble
Angles orientés et fonctions circulaires ( En première S ) Dernière mise à jour : Jeudi 01 Septembre 010 Vincent OBATON, Enseignant au lycée Stendhal de Grenoble (Année 006-007) Lycée Stendhal, Grenoble
OM 1 Outils mathématiques : fonction de plusieurs variables
 Outils mathématiques : fonction de plusieurs variables PCSI 2013 2014 Certaines partie de ce chapitre ne seront utiles qu à partir de l année prochaine, mais une grande partie nous servira dès cette année.
Outils mathématiques : fonction de plusieurs variables PCSI 2013 2014 Certaines partie de ce chapitre ne seront utiles qu à partir de l année prochaine, mais une grande partie nous servira dès cette année.
8.1 Généralités sur les fonctions de plusieurs variables réelles. f : R 2 R (x, y) 1 x 2 y 2
 1 x 2 y 2") Chapitre 8 Fonctions de plusieurs variables 8.1 Généralités sur les fonctions de plusieurs variables réelles Définition. Une fonction réelle de n variables réelles est une application d une partie de R
Chapitre 8 Fonctions de plusieurs variables 8.1 Généralités sur les fonctions de plusieurs variables réelles Définition. Une fonction réelle de n variables réelles est une application d une partie de R
Nombre dérivé et tangente
 Nombre dérivé et tangente I) Interprétation graphique 1) Taux de variation d une fonction en un point. Soit une fonction définie sur un intervalle I contenant le nombre réel a, soit (C) sa courbe représentative
Nombre dérivé et tangente I) Interprétation graphique 1) Taux de variation d une fonction en un point. Soit une fonction définie sur un intervalle I contenant le nombre réel a, soit (C) sa courbe représentative
Chapitre 2 : Caractéristiques du mouvement d un solide
 Chapitre 2 : Caractéristiques du mouvement d un solide I Rappels : Référentiel : Le mouvement d un corps est décris par rapport à un corps de référence et dépend du choix de ce corps. Ce corps de référence
Chapitre 2 : Caractéristiques du mouvement d un solide I Rappels : Référentiel : Le mouvement d un corps est décris par rapport à un corps de référence et dépend du choix de ce corps. Ce corps de référence
Propriétés électriques de la matière
 1 Propriétés électriques de la matière La matière montre des propriétés électriques qui ont été observées depuis l antiquité. Nous allons distinguer les plus fondamentales de ces propriétés. 1 Propriétés
1 Propriétés électriques de la matière La matière montre des propriétés électriques qui ont été observées depuis l antiquité. Nous allons distinguer les plus fondamentales de ces propriétés. 1 Propriétés
FONCTIONS DE PLUSIEURS VARIABLES (Outils Mathématiques 4)
") FONCTIONS DE PLUSIEURS VARIABLES (Outils Mathématiques 4) Bernard Le Stum Université de Rennes 1 Version du 13 mars 2009 Table des matières 1 Fonctions partielles, courbes de niveau 1 2 Limites et continuité
FONCTIONS DE PLUSIEURS VARIABLES (Outils Mathématiques 4) Bernard Le Stum Université de Rennes 1 Version du 13 mars 2009 Table des matières 1 Fonctions partielles, courbes de niveau 1 2 Limites et continuité
Mécanique : Cinématique du point. Chapitre 1 : Position. Vitesse. Accélération
 2 e B et C 1 Position. Vitesse. Accélération 1 Mécanique : Cinéatique du point La écanique est le doaine de tout ce qui produit ou transet un ouveent, une force, une déforation : achines, oteurs, véhicules,
2 e B et C 1 Position. Vitesse. Accélération 1 Mécanique : Cinéatique du point La écanique est le doaine de tout ce qui produit ou transet un ouveent, une force, une déforation : achines, oteurs, véhicules,
Notes du cours MTH1101 Calcul I Partie II: fonctions de plusieurs variables
 Notes du cours MTH1101 Calcul I Partie II: fonctions de plusieurs variables Guy Desaulniers Département de mathématiques et de génie industriel École Polytechnique de Montréal Automne 2014 Table des matières
Notes du cours MTH1101 Calcul I Partie II: fonctions de plusieurs variables Guy Desaulniers Département de mathématiques et de génie industriel École Polytechnique de Montréal Automne 2014 Table des matières
Cours Fonctions de deux variables
 Cours Fonctions de deux variables par Pierre Veuillez 1 Support théorique 1.1 Représentation Plan et espace : Grâce à un repère cartésien ( ) O, i, j du plan, les couples (x, y) de R 2 peuvent être représenté
Cours Fonctions de deux variables par Pierre Veuillez 1 Support théorique 1.1 Représentation Plan et espace : Grâce à un repère cartésien ( ) O, i, j du plan, les couples (x, y) de R 2 peuvent être représenté
F411 - Courbes Paramétrées, Polaires
 1/43 Courbes Paramétrées Courbes polaires Longueur d un arc, Courbure F411 - Courbes Paramétrées, Polaires Michel Fournié [email protected] http://www.math.univ-toulouse.fr/ fournie/ Année 2012/2013
1/43 Courbes Paramétrées Courbes polaires Longueur d un arc, Courbure F411 - Courbes Paramétrées, Polaires Michel Fournié [email protected] http://www.math.univ-toulouse.fr/ fournie/ Année 2012/2013
Fonctions de deux variables. Mai 2011
 Fonctions de deux variables Dédou Mai 2011 D une à deux variables Les fonctions modèlisent de l information dépendant d un paramètre. On a aussi besoin de modéliser de l information dépendant de plusieurs
Fonctions de deux variables Dédou Mai 2011 D une à deux variables Les fonctions modèlisent de l information dépendant d un paramètre. On a aussi besoin de modéliser de l information dépendant de plusieurs
STATIQUE GRAPHIQUE ET STATIQUE ANALYTIQUE
 ÉCOLE D'INGÉNIEURS DE FRIBOURG (E.I.F.) SECTION DE MÉCANIQUE G.R. Nicolet, revu en 2006 STATIQUE GRAPHIQUE ET STATIQUE ANALYTIQUE Eléments de calcul vectoriel Opérations avec les forces Equilibre du point
ÉCOLE D'INGÉNIEURS DE FRIBOURG (E.I.F.) SECTION DE MÉCANIQUE G.R. Nicolet, revu en 2006 STATIQUE GRAPHIQUE ET STATIQUE ANALYTIQUE Eléments de calcul vectoriel Opérations avec les forces Equilibre du point
Exercice 1 Trouver l équation du plan tangent pour chaque surface ci-dessous, au point (x 0,y 0,z 0 ) donné :
 donné :") Enoncés : Stephan de Bièvre Corrections : Johannes Huebschmann Exo7 Plans tangents à un graphe, différentiabilité Exercice 1 Trouver l équation du plan tangent pour chaque surface ci-dessous, au point
Enoncés : Stephan de Bièvre Corrections : Johannes Huebschmann Exo7 Plans tangents à un graphe, différentiabilité Exercice 1 Trouver l équation du plan tangent pour chaque surface ci-dessous, au point
Fonctions de plusieurs variables
 Module : Analyse 03 Chapitre 00 : Fonctions de plusieurs variables Généralités et Rappels des notions topologiques dans : Qu est- ce que?: Mathématiquement, n étant un entier non nul, on définit comme
Module : Analyse 03 Chapitre 00 : Fonctions de plusieurs variables Généralités et Rappels des notions topologiques dans : Qu est- ce que?: Mathématiquement, n étant un entier non nul, on définit comme
Les Conditions aux limites
 Chapitre 5 Les Conditions aux limites Lorsque nous désirons appliquer les équations de base de l EM à des problèmes d exploration géophysique, il est essentiel, pour pouvoir résoudre les équations différentielles,
Chapitre 5 Les Conditions aux limites Lorsque nous désirons appliquer les équations de base de l EM à des problèmes d exploration géophysique, il est essentiel, pour pouvoir résoudre les équations différentielles,
G.P. DNS02 Septembre 2012. Réfraction...1 I.Préliminaires...1 II.Première partie...1 III.Deuxième partie...3. Réfraction
 DNS Sujet Réfraction...1 I.Préliminaires...1 II.Première partie...1 III.Deuxième partie...3 Réfraction I. Préliminaires 1. Rappeler la valeur et l'unité de la perméabilité magnétique du vide µ 0. Donner
DNS Sujet Réfraction...1 I.Préliminaires...1 II.Première partie...1 III.Deuxième partie...3 Réfraction I. Préliminaires 1. Rappeler la valeur et l'unité de la perméabilité magnétique du vide µ 0. Donner
Commun à tous les candidats
 EXERCICE 3 (9 points ) Commun à tous les candidats On s intéresse à des courbes servant de modèle à la distribution de la masse salariale d une entreprise. Les fonctions f associées définies sur l intervalle
EXERCICE 3 (9 points ) Commun à tous les candidats On s intéresse à des courbes servant de modèle à la distribution de la masse salariale d une entreprise. Les fonctions f associées définies sur l intervalle
1 radian. De même, la longueur d un arc de cercle de rayon R et dont l angle au centre a pour mesure α radians est α R. R AB =R.
 Angles orientés Trigonométrie I. Préliminaires. Le radian Définition B R AB =R C O radian R A Soit C un cercle de centre O. Dire que l angle géométrique AOB a pour mesure radian signifie que la longueur
Angles orientés Trigonométrie I. Préliminaires. Le radian Définition B R AB =R C O radian R A Soit C un cercle de centre O. Dire que l angle géométrique AOB a pour mesure radian signifie que la longueur
Seconde Généralités sur les fonctions Exercices. Notion de fonction.
 Seconde Généralités sur les fonctions Exercices Notion de fonction. Exercice. Une fonction définie par une formule. On considère la fonction f définie sur R par = x + x. a) Calculer les images de, 0 et
Seconde Généralités sur les fonctions Exercices Notion de fonction. Exercice. Une fonction définie par une formule. On considère la fonction f définie sur R par = x + x. a) Calculer les images de, 0 et
Erratum de MÉCANIQUE, 6ème édition. Introduction Page xxi (milieu de page) G = 6, 672 59 10 11 m 3 kg 1 s 2
 G = 6, 672 59 10 11 m 3 kg 1 s 2") Introduction Page xxi (milieu de page) G = 6, 672 59 1 11 m 3 kg 1 s 2 Erratum de MÉCANIQUE, 6ème édition Page xxv (dernier tiers de page) le terme de Coriolis est supérieur à 1% du poids) Chapitre 1 Page
Introduction Page xxi (milieu de page) G = 6, 672 59 1 11 m 3 kg 1 s 2 Erratum de MÉCANIQUE, 6ème édition Page xxv (dernier tiers de page) le terme de Coriolis est supérieur à 1% du poids) Chapitre 1 Page
= 1 si n = m& où n et m sont souvent des indices entiers, par exemple, n, m = 0, 1, 2, 3, 4... En fait,! n m
 1 épartement de Physique, Université Laval, Québec Pierre Amiot, 1. La fonction delta et certaines de ses utilisations. Clientèle Ce texte est destiné aux physiciens, ingénieurs et autres scientifiques.
1 épartement de Physique, Université Laval, Québec Pierre Amiot, 1. La fonction delta et certaines de ses utilisations. Clientèle Ce texte est destiné aux physiciens, ingénieurs et autres scientifiques.
LE PRODUIT SCALAIRE ( En première S )
") LE PRODUIT SCALAIRE ( En première S ) Dernière mise à jour : Jeudi 4 Janvier 007 Vincent OBATON, Enseignant au lycée Stendhal de Grenoble ( Année 006-007 ) 1 Table des matières 1 Grille d autoévaluation
LE PRODUIT SCALAIRE ( En première S ) Dernière mise à jour : Jeudi 4 Janvier 007 Vincent OBATON, Enseignant au lycée Stendhal de Grenoble ( Année 006-007 ) 1 Table des matières 1 Grille d autoévaluation
Continuité et dérivabilité d une fonction
 DERNIÈRE IMPRESSIN LE 7 novembre 014 à 10:3 Continuité et dérivabilité d une fonction Table des matières 1 Continuité d une fonction 1.1 Limite finie en un point.......................... 1. Continuité
DERNIÈRE IMPRESSIN LE 7 novembre 014 à 10:3 Continuité et dérivabilité d une fonction Table des matières 1 Continuité d une fonction 1.1 Limite finie en un point.......................... 1. Continuité
MECANIQUE DU POINT. y e y. z e z. ] est le trièdre de référence. e z. où [O, e r. r est la distance à l'axe, θ l'angle polaire et z la côte
![MECANIQUE DU POINT. y e y. z e z. ] est le trièdre de référence. e z. où [O, e r. r est la distance à l'axe, θ l'angle polaire et z la côte](/thumbs/19/247967.jpg "MECANIQUE DU POINT. y e y. z e z. ] est le trièdre de référence. e z. où [O, e r. r est la distance à l'axe, θ l'angle polaire et z la côte") I) Cinématique du point matériel: 1) Référentiel: MECANIQUE DU POINT L ensemble de tous les systèmes d axes de coordonnées liés à un même solide de référence S constitue un repère Soit une horloge permettant
I) Cinématique du point matériel: 1) Référentiel: MECANIQUE DU POINT L ensemble de tous les systèmes d axes de coordonnées liés à un même solide de référence S constitue un repère Soit une horloge permettant
Fonctions de plusieurs variables
 Maths MP Exercices Fonctions de plusieurs variables Les indications ne sont ici que pour être consultées après le T (pour les exercices non traités). Avant et pendant le T, tenez bon et n allez pas les
Maths MP Exercices Fonctions de plusieurs variables Les indications ne sont ici que pour être consultées après le T (pour les exercices non traités). Avant et pendant le T, tenez bon et n allez pas les
Chapitre 7 - Relativité du mouvement
 Un bus roule lentement dans une ville. Alain (A) est assis dans le bus, Brigitte (B) marche dans l'allée vers l'arrière du bus pour faire des signes à Claude (C) qui est au bord de la route. Brigitte marche
Un bus roule lentement dans une ville. Alain (A) est assis dans le bus, Brigitte (B) marche dans l'allée vers l'arrière du bus pour faire des signes à Claude (C) qui est au bord de la route. Brigitte marche
C est un mouvement plan dont la trajectoire est un cercle ou une portion de cercle. Le module du vecteur position OM est constant et il est égal au
 1 2 C est un mouvement plan dont la trajectoire est un cercle ou une portion de cercle. Le module du vecteur position est constant et il est égal au rayon du cercle. = 3 A- ouvement circulaire non uniforme
1 2 C est un mouvement plan dont la trajectoire est un cercle ou une portion de cercle. Le module du vecteur position est constant et il est égal au rayon du cercle. = 3 A- ouvement circulaire non uniforme
Notes du cours MTH1101N Calcul I Partie II: fonctions de plusieurs variables
 Notes du cours MTH1101N Calcul I Partie II: fonctions de plusieurs variables Fausto Errico Département de mathématiques et de génie industriel École Polytechnique de Montréal Automne 2012 Table des matières
Notes du cours MTH1101N Calcul I Partie II: fonctions de plusieurs variables Fausto Errico Département de mathématiques et de génie industriel École Polytechnique de Montréal Automne 2012 Table des matières
CHAPITRE 10. Jacobien, changement de coordonnées.
 CHAPITRE 10 Jacobien, changement de coordonnées ans ce chapitre, nous allons premièrement rappeler la définition du déterminant d une matrice Nous nous limiterons au cas des matrices d ordre 2 2et3 3,
CHAPITRE 10 Jacobien, changement de coordonnées ans ce chapitre, nous allons premièrement rappeler la définition du déterminant d une matrice Nous nous limiterons au cas des matrices d ordre 2 2et3 3,
Oscillations libres des systèmes à deux degrés de liberté
 Chapitre 4 Oscillations libres des systèmes à deux degrés de liberté 4.1 Introduction Les systèmes qui nécessitent deux coordonnées indépendantes pour spécifier leurs positions sont appelés systèmes à
Chapitre 4 Oscillations libres des systèmes à deux degrés de liberté 4.1 Introduction Les systèmes qui nécessitent deux coordonnées indépendantes pour spécifier leurs positions sont appelés systèmes à
Quantité de mouvement et moment cinétique
 6 Quantité de mouvement et moment cinétique v7 p = mv L = r p 1 Impulsion et quantité de mouvement Une force F agit sur un corps de masse m, pendant un temps Δt. La vitesse du corps varie de Δv = v f -
6 Quantité de mouvement et moment cinétique v7 p = mv L = r p 1 Impulsion et quantité de mouvement Une force F agit sur un corps de masse m, pendant un temps Δt. La vitesse du corps varie de Δv = v f -
BACCALAURÉAT GÉNÉRAL SESSION 2012 OBLIGATOIRE MATHÉMATIQUES. Série S. Durée de l épreuve : 4 heures Coefficient : 7 ENSEIGNEMENT OBLIGATOIRE
 BACCALAURÉAT GÉNÉRAL SESSION 2012 MATHÉMATIQUES Série S Durée de l épreuve : 4 heures Coefficient : 7 ENSEIGNEMENT OBLIGATOIRE Les calculatrices électroniques de poche sont autorisées, conformément à la
BACCALAURÉAT GÉNÉRAL SESSION 2012 MATHÉMATIQUES Série S Durée de l épreuve : 4 heures Coefficient : 7 ENSEIGNEMENT OBLIGATOIRE Les calculatrices électroniques de poche sont autorisées, conformément à la
Cours IV Mise en orbite
 Introduction au vol spatial Cours IV Mise en orbite If you don t know where you re going, you ll probably end up somewhere else. Yogi Berra, NY Yankees catcher v1.2.8 by-sa Olivier Cleynen Introduction
Introduction au vol spatial Cours IV Mise en orbite If you don t know where you re going, you ll probably end up somewhere else. Yogi Berra, NY Yankees catcher v1.2.8 by-sa Olivier Cleynen Introduction
Une technologie ludique
 Une technologie ludique Rémi stavrakas, Patricia chabert [1] C est à partir d un support bien connu de nos élèves, la manette de la Wii, la console de jeu de Nintendo, qu une équipe pédagogique de l académie
Une technologie ludique Rémi stavrakas, Patricia chabert [1] C est à partir d un support bien connu de nos élèves, la manette de la Wii, la console de jeu de Nintendo, qu une équipe pédagogique de l académie
Plan du cours : électricité 1
 Semestre : S2 Module Physique II 1 Electricité 1 2 Optique géométrique Plan du cours : électricité 1 Partie A : Electrostatique (discipline de l étude des phénomènes liés aux distributions de charges stationnaires)
Semestre : S2 Module Physique II 1 Electricité 1 2 Optique géométrique Plan du cours : électricité 1 Partie A : Electrostatique (discipline de l étude des phénomènes liés aux distributions de charges stationnaires)
Fonctions de plusieurs variables. Sébastien Tordeux
 Fonctions de plusieurs variables Sébastien Tordeux 22 février 2009 Table des matières 1 Fonctions de plusieurs variables 3 1.1 Définition............................. 3 1.2 Limite et continuité.......................
Fonctions de plusieurs variables Sébastien Tordeux 22 février 2009 Table des matières 1 Fonctions de plusieurs variables 3 1.1 Définition............................. 3 1.2 Limite et continuité.......................
Chapitre 3. Quelques fonctions usuelles. 1 Fonctions logarithme et exponentielle. 1.1 La fonction logarithme
 Chapitre 3 Quelques fonctions usuelles 1 Fonctions logarithme et eponentielle 1.1 La fonction logarithme Définition 1.1 La fonction 7! 1/ est continue sur ]0, +1[. Elle admet donc des primitives sur cet
Chapitre 3 Quelques fonctions usuelles 1 Fonctions logarithme et eponentielle 1.1 La fonction logarithme Définition 1.1 La fonction 7! 1/ est continue sur ]0, +1[. Elle admet donc des primitives sur cet
Introduction à l'electromagnétisme
 Introduction à l'electromagnétisme 5 novembre 2014 Table des matières 1 Systèmes de coordonnées et vecteurs 6 1.1 Systèmes de coordonnées................................... 6 1.1.1 Repère cartésien...................................
Introduction à l'electromagnétisme 5 novembre 2014 Table des matières 1 Systèmes de coordonnées et vecteurs 6 1.1 Systèmes de coordonnées................................... 6 1.1.1 Repère cartésien...................................
Chapitre 9 : Applications des lois de Newton et Kepler à l'étude du mouvement des planètes et des satellites
 I- Les trois lois de Kepler : Chapitre 9 : Applications des lois de Newton et Kepler à l'étude du mouvement des planètes et des satellites Les lois de Kepler s'applique aussi bien pour une planète en mouvement
I- Les trois lois de Kepler : Chapitre 9 : Applications des lois de Newton et Kepler à l'étude du mouvement des planètes et des satellites Les lois de Kepler s'applique aussi bien pour une planète en mouvement
Fonctions de plusieurs variables, intégrales multiples, et intégrales dépendant d un paramètre
 IUFM du Limousin 2009-10 PLC1 Mathématiques S. Vinatier Rappels de cours Fonctions de plusieurs variables, intégrales multiples, et intégrales dépendant d un paramètre 1 Fonctions de plusieurs variables
IUFM du Limousin 2009-10 PLC1 Mathématiques S. Vinatier Rappels de cours Fonctions de plusieurs variables, intégrales multiples, et intégrales dépendant d un paramètre 1 Fonctions de plusieurs variables
Dérivation : cours. Dérivation dans R
 TS Dérivation dans R Dans tout le capitre, f désigne une fonction définie sur un intervalle I de R (non vide et non réduit à un élément) et à valeurs dans R. Petits rappels de première Téorème-définition
TS Dérivation dans R Dans tout le capitre, f désigne une fonction définie sur un intervalle I de R (non vide et non réduit à un élément) et à valeurs dans R. Petits rappels de première Téorème-définition
LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE
 LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE 2. L EFFET GYROSCOPIQUE Les lois physiques qui régissent le mouvement des véhicules terrestres sont des lois universelles qui s appliquent
LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE 2. L EFFET GYROSCOPIQUE Les lois physiques qui régissent le mouvement des véhicules terrestres sont des lois universelles qui s appliquent
TS Physique Satellite à la recherche de sa planète Exercice résolu
 P a g e 1 Phsique atellite à la recherche de sa planète Exercice résolu Enoncé Le centre spatial de Kourou a lancé le 1 décembre 005, avec une fusée Ariane 5, un satellite de météorologie de seconde génération
P a g e 1 Phsique atellite à la recherche de sa planète Exercice résolu Enoncé Le centre spatial de Kourou a lancé le 1 décembre 005, avec une fusée Ariane 5, un satellite de météorologie de seconde génération
DYNAMIQUE DE FORMATION DES ÉTOILES
 A 99 PHYS. II ÉCOLE NATIONALE DES PONTS ET CHAUSSÉES, ÉCOLES NATIONALES SUPÉRIEURES DE L'AÉRONAUTIQUE ET DE L'ESPACE, DE TECHNIQUES AVANCÉES, DES TÉLÉCOMMUNICATIONS, DES MINES DE PARIS, DES MINES DE SAINT-ÉTIENNE,
A 99 PHYS. II ÉCOLE NATIONALE DES PONTS ET CHAUSSÉES, ÉCOLES NATIONALES SUPÉRIEURES DE L'AÉRONAUTIQUE ET DE L'ESPACE, DE TECHNIQUES AVANCÉES, DES TÉLÉCOMMUNICATIONS, DES MINES DE PARIS, DES MINES DE SAINT-ÉTIENNE,
Système formé de deux points
 MPSI - 2005/2006 - Mécanique II - Système formé de deux points matériels page /5 Système formé de deux points matériels Table des matières Éléments cinétiques. Éléments cinétiques dans R.......................2
MPSI - 2005/2006 - Mécanique II - Système formé de deux points matériels page /5 Système formé de deux points matériels Table des matières Éléments cinétiques. Éléments cinétiques dans R.......................2
Découverte du logiciel ordinateur TI-n spire / TI-n spire CAS
 Découverte du logiciel ordinateur TI-n spire / TI-n spire CAS Mémento Ouvrir TI-Nspire CAS. Voici la barre d outils : L insertion d une page, d une activité, d une page où l application est choisie, pourra
Découverte du logiciel ordinateur TI-n spire / TI-n spire CAS Mémento Ouvrir TI-Nspire CAS. Voici la barre d outils : L insertion d une page, d une activité, d une page où l application est choisie, pourra
Travaux dirigés de mécanique du point
 Travaux dirigés de mécanique du point Année 011-01 Arnaud LE PADELLEC Magali MOURGUES [email protected] [email protected] Travaux dirigés de mécanique du point 1/40 P r é s e n t a t
Travaux dirigés de mécanique du point Année 011-01 Arnaud LE PADELLEC Magali MOURGUES [email protected] [email protected] Travaux dirigés de mécanique du point 1/40 P r é s e n t a t
Chapitre 6. Fonction réelle d une variable réelle
 Chapitre 6 Fonction réelle d une variable réelle 6. Généralités et plan d étude Une application de I dans R est une correspondance entre les éléments de I et ceu de R telle que tout élément de I admette
Chapitre 6 Fonction réelle d une variable réelle 6. Généralités et plan d étude Une application de I dans R est une correspondance entre les éléments de I et ceu de R telle que tout élément de I admette
Fonctions de plusieurs variables
 UNIVERSITÉ DE POITIERS Parcours Renforcé Première Année 2009/2010 Paul Broussous Fonctions de plusieurs variables Seconde version corrigée Table des matières 1. Un peu de topologie. 1.1. Distance euclidienne,
UNIVERSITÉ DE POITIERS Parcours Renforcé Première Année 2009/2010 Paul Broussous Fonctions de plusieurs variables Seconde version corrigée Table des matières 1. Un peu de topologie. 1.1. Distance euclidienne,
BACCALAUREAT GENERAL MATHÉMATIQUES
 BACCALAUREAT GENERAL FEVRIER 2014 MATHÉMATIQUES SERIE : ES Durée de l épreuve : 3 heures Coefficient : 5 (ES), 4 (L) 7(spe ES) Les calculatrices électroniques de poche sont autorisées, conformement à la
BACCALAUREAT GENERAL FEVRIER 2014 MATHÉMATIQUES SERIE : ES Durée de l épreuve : 3 heures Coefficient : 5 (ES), 4 (L) 7(spe ES) Les calculatrices électroniques de poche sont autorisées, conformement à la
Représentation géométrique d un nombre complexe
 CHAPITRE 1 NOMBRES COMPLEXES 1 Représentation géométrique d un nombre complexe 1. Ensemble des nombres complexes Soit i le nombre tel que i = 1 L ensemble des nombres complexes est l ensemble des nombres
CHAPITRE 1 NOMBRES COMPLEXES 1 Représentation géométrique d un nombre complexe 1. Ensemble des nombres complexes Soit i le nombre tel que i = 1 L ensemble des nombres complexes est l ensemble des nombres
Rupture et plasticité
 Rupture et plasticité Département de Mécanique, Ecole Polytechnique, 2009 2010 Département de Mécanique, Ecole Polytechnique, 2009 2010 25 novembre 2009 1 / 44 Rupture et plasticité : plan du cours Comportements
Rupture et plasticité Département de Mécanique, Ecole Polytechnique, 2009 2010 Département de Mécanique, Ecole Polytechnique, 2009 2010 25 novembre 2009 1 / 44 Rupture et plasticité : plan du cours Comportements
Travaux dirigés de magnétisme
 Travaux dirigés de magnétisme Année 2011-2012 Christophe GATEL Arnaud LE PADELLEC gatel@cemesfr alepadellec@irapompeu Travaux dirigés de magnétisme page 2 Travaux dirigés de magnétisme page 3 P r é s e
Travaux dirigés de magnétisme Année 2011-2012 Christophe GATEL Arnaud LE PADELLEC gatel@cemesfr alepadellec@irapompeu Travaux dirigés de magnétisme page 2 Travaux dirigés de magnétisme page 3 P r é s e
INTRODUCTION. A- Modélisation et paramétrage : CHAPITRE I : MODÉLISATION. I. Paramétrage de la position d un solide : (S1) O O1 X
 O O1 X") INTRODUCTION La conception d'un mécanisme en vue de sa réalisation industrielle comporte plusieurs étapes. Avant d'aboutir à la maquette numérique du produit définitif, il est nécessaire d'effectuer une
INTRODUCTION La conception d'un mécanisme en vue de sa réalisation industrielle comporte plusieurs étapes. Avant d'aboutir à la maquette numérique du produit définitif, il est nécessaire d'effectuer une
TD de Physique n o 1 : Mécanique du point
 E.N.S. de Cachan Département E.E.A. M FE 3 e année Phsique appliquée 011-01 TD de Phsique n o 1 : Mécanique du point Exercice n o 1 : Trajectoire d un ballon-sonde Un ballon-sonde M, lâché au niveau du
E.N.S. de Cachan Département E.E.A. M FE 3 e année Phsique appliquée 011-01 TD de Phsique n o 1 : Mécanique du point Exercice n o 1 : Trajectoire d un ballon-sonde Un ballon-sonde M, lâché au niveau du
Cinétique et dynamique des systèmes de solides
 Cinétique et dynamique des systèmes de solides Page 2/30 CINÉTIQUE des systèmes matériels... 3 1.) Notion de masse...3 2.) Centre de masse d'un ensemble matériel...4 3.) Torseurs cinétique et dynamique...6
Cinétique et dynamique des systèmes de solides Page 2/30 CINÉTIQUE des systèmes matériels... 3 1.) Notion de masse...3 2.) Centre de masse d'un ensemble matériel...4 3.) Torseurs cinétique et dynamique...6
DM n o 8 TS1 2012 Physique 10 (satellites) + Chimie 12 (catalyse) Exercice 1 Lancement d un satellite météorologique
 + Chimie 12 (catalyse) Exercice 1 Lancement d un satellite météorologique") DM n o 8 TS1 2012 Physique 10 (satellites) + Chimie 12 (catalyse) Exercice 1 Lancement d un satellite météorologique Le centre spatial de Kourou a lancé le 21 décembre 200, avec une fusée Ariane, un satellite
DM n o 8 TS1 2012 Physique 10 (satellites) + Chimie 12 (catalyse) Exercice 1 Lancement d un satellite météorologique Le centre spatial de Kourou a lancé le 21 décembre 200, avec une fusée Ariane, un satellite
Circuits RL et RC. Chapitre 5. 5.1 Inductance
 Chapitre 5 Circuits RL et RC Ce chapitre présente les deux autres éléments linéaires des circuits électriques : l inductance et la capacitance. On verra le comportement de ces deux éléments, et ensuite
Chapitre 5 Circuits RL et RC Ce chapitre présente les deux autres éléments linéaires des circuits électriques : l inductance et la capacitance. On verra le comportement de ces deux éléments, et ensuite
Mécanique du Point Matériel
 LYCEE FAIDHERBE LILLE ANNEE SCOLAIRE 2010-2011 SUP PCSI2 JFA. Bange Mécanique du Point Matériel Plan A. Formulaire 1. Cinématique du point matériel 2. Dynamique du point matériel 3. Travail, énergie 4.
LYCEE FAIDHERBE LILLE ANNEE SCOLAIRE 2010-2011 SUP PCSI2 JFA. Bange Mécanique du Point Matériel Plan A. Formulaire 1. Cinématique du point matériel 2. Dynamique du point matériel 3. Travail, énergie 4.
Les travaux doivent être remis sous forme papier.
 Physique mathématique II Calendrier: Date Pondération/note nale Matériel couvert ExercicesSérie 1 : 25 septembre 2014 5% RH&B: Ch. 3 ExercicesSérie 2 : 23 octobre 2014 5% RH&B: Ch. 12-13 Examen 1 : 24
Physique mathématique II Calendrier: Date Pondération/note nale Matériel couvert ExercicesSérie 1 : 25 septembre 2014 5% RH&B: Ch. 3 ExercicesSérie 2 : 23 octobre 2014 5% RH&B: Ch. 12-13 Examen 1 : 24
Interaction milieux dilués rayonnement Travaux dirigés n 2. Résonance magnétique : approche classique
 PGA & SDUEE Année 008 09 Interaction milieux dilués rayonnement Travaux dirigés n. Résonance magnétique : approche classique Première interprétation classique d une expérience de résonance magnétique On
PGA & SDUEE Année 008 09 Interaction milieux dilués rayonnement Travaux dirigés n. Résonance magnétique : approche classique Première interprétation classique d une expérience de résonance magnétique On
Examen d informatique première session 2004
 Examen d informatique première session 2004 Le chiffre à côté du titre de la question indique le nombre de points sur 40. I) Lentille électrostatique à fente (14) Le problème étudié est à deux dimensions.
Examen d informatique première session 2004 Le chiffre à côté du titre de la question indique le nombre de points sur 40. I) Lentille électrostatique à fente (14) Le problème étudié est à deux dimensions.
10 leçon 2. Leçon n 2 : Contact entre deux solides. Frottement de glissement. Exemples. (PC ou 1 er CU)
") 0 leçon 2 Leçon n 2 : Contact entre deu solides Frottement de glissement Eemples (PC ou er CU) Introduction Contact entre deu solides Liaisons de contact 2 Contact ponctuel 2 Frottement de glissement 2
0 leçon 2 Leçon n 2 : Contact entre deu solides Frottement de glissement Eemples (PC ou er CU) Introduction Contact entre deu solides Liaisons de contact 2 Contact ponctuel 2 Frottement de glissement 2
Développements limités, équivalents et calculs de limites
 Développements ités, équivalents et calculs de ites Eercice. Déterminer le développement ité en 0 à l ordre n des fonctions suivantes :. f() e (+) 3 n. g() sin() +ln(+) n 3 3. h() e sh() n 4. i() sin(
Développements ités, équivalents et calculs de ites Eercice. Déterminer le développement ité en 0 à l ordre n des fonctions suivantes :. f() e (+) 3 n. g() sin() +ln(+) n 3 3. h() e sh() n 4. i() sin(
Equations cartésiennes d une droite
 Equations cartésiennes d une droite I) Vecteur directeur d une droite : 1) Définition Soit (d) une droite du plan. Un vecteur directeur d une droite (d) est un vecteur non nul la même direction que la
Equations cartésiennes d une droite I) Vecteur directeur d une droite : 1) Définition Soit (d) une droite du plan. Un vecteur directeur d une droite (d) est un vecteur non nul la même direction que la
Eléments de Relativité générale
 Eléments de Relativité générale par Gilbert Gastebois 1. Notations 1.1 Unités En relativité générale on adopte certaines conventions sur les unités pour simplifier les formules : On prend la vitesse de
Eléments de Relativité générale par Gilbert Gastebois 1. Notations 1.1 Unités En relativité générale on adopte certaines conventions sur les unités pour simplifier les formules : On prend la vitesse de
Vision industrielle et télédétection - Détection d ellipses. Guillaume Martinez 17 décembre 2007
 Vision industrielle et télédétection - Détection d ellipses Guillaume Martinez 17 décembre 2007 1 Table des matières 1 Le projet 3 1.1 Objectif................................ 3 1.2 Les choix techniques.........................
Vision industrielle et télédétection - Détection d ellipses Guillaume Martinez 17 décembre 2007 1 Table des matières 1 Le projet 3 1.1 Objectif................................ 3 1.2 Les choix techniques.........................
Fonctions Analytiques
 5 Chapitre Fonctions Analytiques. Le plan complexe.. Rappels Soit z C, alors!(x,y) IR 2 tel que z = x + iy. On définit le module de z comme z = x 2 + y 2. On peut aussi repérer z par des coordonnées polaires,
5 Chapitre Fonctions Analytiques. Le plan complexe.. Rappels Soit z C, alors!(x,y) IR 2 tel que z = x + iy. On définit le module de z comme z = x 2 + y 2. On peut aussi repérer z par des coordonnées polaires,
Géométrie dans l espace Produit scalaire et équations
 Chapitre 11. 2ème partie Géométrie dans l espace Produit scalaire et équations Terminale S Ce que dit le programme : CONTENUS CAPACITÉS ATTENDUES COMMENTAIRES 2ème partie Produit scalaire Produit scalaire
Chapitre 11. 2ème partie Géométrie dans l espace Produit scalaire et équations Terminale S Ce que dit le programme : CONTENUS CAPACITÉS ATTENDUES COMMENTAIRES 2ème partie Produit scalaire Produit scalaire
Correction du baccalauréat S Liban juin 2007
 Correction du baccalauréat S Liban juin 07 Exercice. a. Signe de lnx lnx) : on fait un tableau de signes : x 0 e + ln x 0 + + lnx + + 0 lnx lnx) 0 + 0 b. On afx) gx) lnx lnx) lnx lnx). On déduit du tableau
Correction du baccalauréat S Liban juin 07 Exercice. a. Signe de lnx lnx) : on fait un tableau de signes : x 0 e + ln x 0 + + lnx + + 0 lnx lnx) 0 + 0 b. On afx) gx) lnx lnx) lnx lnx). On déduit du tableau
Exercices - Fonctions de plusieurs variables : corrigé. Pour commencer
 Pour commencer Exercice 1 - Ensembles de définition - Première année - 1. Le logarithme est défini si x + y > 0. On trouve donc le demi-plan supérieur délimité par la droite d équation x + y = 0.. 1 xy
Pour commencer Exercice 1 - Ensembles de définition - Première année - 1. Le logarithme est défini si x + y > 0. On trouve donc le demi-plan supérieur délimité par la droite d équation x + y = 0.. 1 xy
I - Quelques propriétés des étoiles à neutrons
 Formation Interuniversitaire de Physique Option de L3 Ecole Normale Supérieure de Paris Astrophysique Patrick Hennebelle François Levrier Sixième TD 14 avril 2015 Les étoiles dont la masse initiale est
Formation Interuniversitaire de Physique Option de L3 Ecole Normale Supérieure de Paris Astrophysique Patrick Hennebelle François Levrier Sixième TD 14 avril 2015 Les étoiles dont la masse initiale est
Cours d Analyse. Fonctions de plusieurs variables
 Cours d Analyse Fonctions de plusieurs variables Licence 1ère année 2007/2008 Nicolas Prioux Université de Marne-la-Vallée Table des matières 1 Notions de géométrie dans l espace et fonctions à deux variables........
Cours d Analyse Fonctions de plusieurs variables Licence 1ère année 2007/2008 Nicolas Prioux Université de Marne-la-Vallée Table des matières 1 Notions de géométrie dans l espace et fonctions à deux variables........
Complément d information concernant la fiche de concordance
 Sommaire SAMEDI 0 DÉCEMBRE 20 Vous trouverez dans ce dossier les documents correspondants à ce que nous allons travailler aujourd hui : La fiche de concordance pour le DAEU ; Page 2 Un rappel de cours
Sommaire SAMEDI 0 DÉCEMBRE 20 Vous trouverez dans ce dossier les documents correspondants à ce que nous allons travailler aujourd hui : La fiche de concordance pour le DAEU ; Page 2 Un rappel de cours
Module d Electricité. 2 ème partie : Electrostatique. Fabrice Sincère (version 3.0.1) http://pagesperso-orange.fr/fabrice.sincere
 http://pagesperso-orange.fr/fabrice.sincere") Module d Electricité 2 ème partie : Electrostatique Fabrice Sincère (version 3.0.1) http://pagesperso-orange.fr/fabrice.sincere 1 Introduction Principaux constituants de la matière : - protons : charge
Module d Electricité 2 ème partie : Electrostatique Fabrice Sincère (version 3.0.1) http://pagesperso-orange.fr/fabrice.sincere 1 Introduction Principaux constituants de la matière : - protons : charge
cel-00530377, version 1-28 Oct 2010
 Mécanique des milieux continus F r a n ç o i s S i d o r o f f p Ce document est sous licence Creative Commons Paternité Pas d Utilisation Commerciale Partage des Conditions Initiales à l Identique 3.0
Mécanique des milieux continus F r a n ç o i s S i d o r o f f p Ce document est sous licence Creative Commons Paternité Pas d Utilisation Commerciale Partage des Conditions Initiales à l Identique 3.0
Université de Caen. Relativité générale. C. LONGUEMARE Applications version 2.0. 4 mars 2014
 Université de Caen LMNO Relativité générale C. LONGUEMARE Applications version.0 4 mars 014 Plan 1. Rappels de dynamique classique La force de Coulomb Le principe de moindre action : lagrangien, hamiltonien
Université de Caen LMNO Relativité générale C. LONGUEMARE Applications version.0 4 mars 014 Plan 1. Rappels de dynamique classique La force de Coulomb Le principe de moindre action : lagrangien, hamiltonien
COMPTE-RENDU «MATHS EN JEANS» LYCEE OZENNE Groupe 1 : Comment faire une carte juste de la Terre?
 Claire FORGACZ Marion GALLART Hasnia GOUDJILI COMPTERENDU «MATHS EN JEANS» LYCEE OZENNE Groupe 1 : Comment faire une carte juste de la Terre? Si l on se pose la question de savoir comment on peut faire
Claire FORGACZ Marion GALLART Hasnia GOUDJILI COMPTERENDU «MATHS EN JEANS» LYCEE OZENNE Groupe 1 : Comment faire une carte juste de la Terre? Si l on se pose la question de savoir comment on peut faire
SYSTEME DE PARTICULES. DYNAMIQUE DU SOLIDE (suite) Table des matières
 Table des matières") Physique Générale SYSTEME DE PARTICULES DYNAMIQUE DU SOLIDE (suite) TRAN Minh Tâm Table des matières Applications de la loi de Newton pour la rotation 93 Le gyroscope........................ 93 L orbite
Physique Générale SYSTEME DE PARTICULES DYNAMIQUE DU SOLIDE (suite) TRAN Minh Tâm Table des matières Applications de la loi de Newton pour la rotation 93 Le gyroscope........................ 93 L orbite
Chapitre. Chapitre 12. Fonctions de plusieurs variables. 1. Fonctions à valeurs réelles. 1.1 Définition. 1.2 Calcul de dérivées partielles
 1 Chapitre Chapitre 1. Fonctions e plusieurs variables La TI-Nspire CAS permet e manipuler très simplement les onctions e plusieurs variables. Nous allons voir ans ce chapitre comment procéer, et éinir
1 Chapitre Chapitre 1. Fonctions e plusieurs variables La TI-Nspire CAS permet e manipuler très simplement les onctions e plusieurs variables. Nous allons voir ans ce chapitre comment procéer, et éinir
La Mesure du Temps. et Temps Solaire Moyen H m.
 La Mesure du Temps Unité de temps du Système International. C est la seconde, de symbole s. Sa définition actuelle a été établie en 1967 par la 13 ème Conférence des Poids et Mesures : la seconde est la
La Mesure du Temps Unité de temps du Système International. C est la seconde, de symbole s. Sa définition actuelle a été établie en 1967 par la 13 ème Conférence des Poids et Mesures : la seconde est la
POLY-PREPAS Centre de Préparation aux Concours Paramédicaux. - Section Audioprothésiste / stage i-prépa intensif -
 POLY-PREPAS Centre de Préparation aux Concours Paramédicaux - Section Audioprothésiste / stage i-prépa intensif - 70 Chapitre 8 : Champ de gravitation - Satellites I. Loi de gravitation universelle : (
POLY-PREPAS Centre de Préparation aux Concours Paramédicaux - Section Audioprothésiste / stage i-prépa intensif - 70 Chapitre 8 : Champ de gravitation - Satellites I. Loi de gravitation universelle : (
TOUT CE QU IL FAUT SAVOIR POUR LE BREVET
 TOUT E QU IL FUT SVOIR POUR LE REVET NUMERIQUE / FONTIONS eci n est qu un rappel de tout ce qu il faut savoir en maths pour le brevet. I- Opérations sur les nombres et les fractions : Les priorités par
TOUT E QU IL FUT SVOIR POUR LE REVET NUMERIQUE / FONTIONS eci n est qu un rappel de tout ce qu il faut savoir en maths pour le brevet. I- Opérations sur les nombres et les fractions : Les priorités par
TD1 PROPAGATION DANS UN MILIEU PRESENTANT UN GRADIENT D'INDICE
 TD1 PROPAGATION DANS UN MILIEU PRESENTANT UN GRADIENT D'INDICE Exercice en classe EXERCICE 1 : La fibre à gradient d indice On considère la propagation d une onde électromagnétique dans un milieu diélectrique
TD1 PROPAGATION DANS UN MILIEU PRESENTANT UN GRADIENT D'INDICE Exercice en classe EXERCICE 1 : La fibre à gradient d indice On considère la propagation d une onde électromagnétique dans un milieu diélectrique
Développements limités. Notion de développement limité
 MT12 - ch2 Page 1/8 Développements limités Dans tout ce chapitre, I désigne un intervalle de R non vide et non réduit à un point. I Notion de développement limité Dans tout ce paragraphe, a désigne un
MT12 - ch2 Page 1/8 Développements limités Dans tout ce chapitre, I désigne un intervalle de R non vide et non réduit à un point. I Notion de développement limité Dans tout ce paragraphe, a désigne un
INTRODUCTION. 1 k 2. k=1
 Capes externe de mathématiques : session 7 Première composition INTRODUCTION L objet du problème est l étude de la suite (s n n définie par : n, s n = Dans une première partie, nous nous attacherons à
Capes externe de mathématiques : session 7 Première composition INTRODUCTION L objet du problème est l étude de la suite (s n n définie par : n, s n = Dans une première partie, nous nous attacherons à
I - PUISSANCE D UN POINT PAR RAPPORT A UN CERCLE CERCLES ORTHOGONAUX POLES ET POLAIRES
 I - PUISSANCE D UN POINT PAR RAPPORT A UN CERCLE CERCLES ORTHOGONAUX POLES ET POLAIRES Théorème - Définition Soit un cercle (O,R) et un point. Une droite passant par coupe le cercle en deux points A et
I - PUISSANCE D UN POINT PAR RAPPORT A UN CERCLE CERCLES ORTHOGONAUX POLES ET POLAIRES Théorème - Définition Soit un cercle (O,R) et un point. Une droite passant par coupe le cercle en deux points A et
C f tracée ci- contre est la représentation graphique d une
 TLES1 DEVOIR A LA MAISON N 7 La courbe C f tracée ci- contre est la représentation graphique d une fonction f définie et dérivable sur R. On note f ' la fonction dérivée de f. La tangente T à la courbe
TLES1 DEVOIR A LA MAISON N 7 La courbe C f tracée ci- contre est la représentation graphique d une fonction f définie et dérivable sur R. On note f ' la fonction dérivée de f. La tangente T à la courbe
MOTO ELECTRIQUE. CPGE / Sciences Industrielles pour l Ingénieur TD06_08 Moto électrique DIAGRAMME DES INTER-ACTEURS UTILISATEUR ENVIRONNEMENT HUMAIN
 MOTO ELECTRIQUE MISE EN SITUATION La moto électrique STRADA EVO 1 est fabriquée par une société SUISSE, située à LUGANO. Moyen de transport alternatif, peut-être la solution pour concilier contraintes
MOTO ELECTRIQUE MISE EN SITUATION La moto électrique STRADA EVO 1 est fabriquée par une société SUISSE, située à LUGANO. Moyen de transport alternatif, peut-être la solution pour concilier contraintes
Etude de fonctions: procédure et exemple
 Etude de fonctions: procédure et exemple Yves Delhaye 8 juillet 2007 Résumé Dans ce court travail, nous présentons les différentes étapes d une étude de fonction à travers un exemple. Nous nous limitons
Etude de fonctions: procédure et exemple Yves Delhaye 8 juillet 2007 Résumé Dans ce court travail, nous présentons les différentes étapes d une étude de fonction à travers un exemple. Nous nous limitons
Mesure d angles et trigonométrie
 Thierry Ciblac Mesure d angles et trigonométrie Mesure de l angle de deux axes (ou de deux demi-droites) de même origine. - Mesures en degrés : Divisons un cercle en 360 parties égales définissant ainsi
Thierry Ciblac Mesure d angles et trigonométrie Mesure de l angle de deux axes (ou de deux demi-droites) de même origine. - Mesures en degrés : Divisons un cercle en 360 parties égales définissant ainsi