Formes Normales non linéaires
|
|
|
- Noëlle Blanchette
- il y a 10 ans
- Total affichages :
Transcription
1 Formes Normales non linéaires d observabilités s réduites r D. BOUTAT

2 Le plan de la présentation Quelques formes d observabilité canoniques Une petite enquête sur le web. L observateur réduit pour les systèmes linéaires. Formes d observabilités réduites non linéaires. La transformation.

3 Quelques formes canoniques extension dynamique. Krener, Isidori, Repondek, Xia, Gao, Phelps, Nam, Plestan, Glumineau, Hou, Pugh, Boutat, Zheng, Hammouri, Bornard, Gauthier, Fliess, Kupka, Noh, N.H. Jo, J.H. Seo, Back, Y. Kyung T, J.H. Seo.

4 Confidentiel

5 Confidentiel
6 Confidentiel
7 Confidentiel Un système linéaire d ordre 2
8 Aucun secret en redondance

9 Sans secret

10 Un excellent cours Jakob Stoustrup
11 Observateur réduit le cas linéaire On considère le système linéaire suivant : mesures On veut estimer sachant que Nouvelle sortie!! Système est observable si et seulement si satisfait la condition du rang. L intérêt : éviter la redondance des mesures!! Quelques fois on n a pas besoin de entièrement!

12 Observateur réduit le cas linéaire Proposition le système dynamique suivant : est un observateur réduit En effet, la dynamique de l erreur de l observation réduite est donnée par : Elle est stable sous la condition de observable Sauf qu il y a un problème!

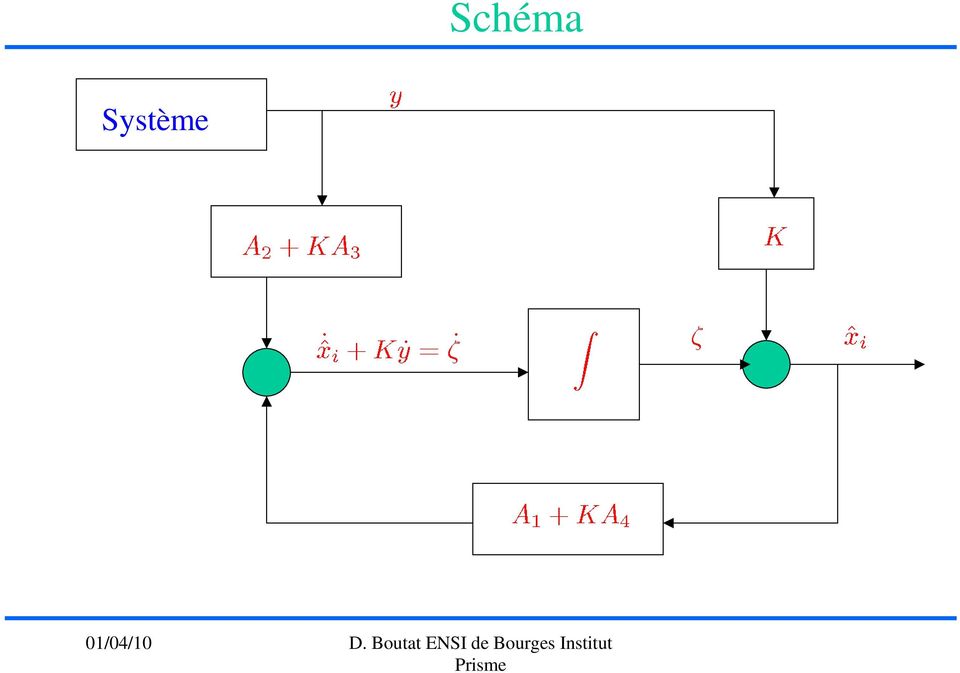
13 Estimateur algébrique Estimateur la clé dynamique qui ne dépend pas de Observateur

14 Schéma Système
15 Le cas non linéaire : au delà de l occurrence des mesures On considère le système linéaire suivant : On peut montrer qu il ne peut se mettre sous la FCON. Indices d observabilité (2,2) Indices d observabilité (3,1) Plusieurs champs ne commutent pas
 Indices d observabilité (3,1)")
16 Exemple Cependant il admet un observateur réduit : En plus du problème de la redondance, l observateur réduit augmente la classe des systèmes non linéaires pour lesquels l «erreur de l observation» est linéaire.

17 Quelques travaux sur l observateur réduit non linéaire

18 Quelques travaux sur l observateur réduit non linéaire



19 Quelques travaux sur l observateur réduit non linéaire

20 Observateur réduit non linéaire (temps continu) D. Boutat, G. Zheng et H. Hammouri Nolcos On considère le système non linéaire suivant :

21 Observateur réduit non linéaire (continu) Proposition La dynamique suivante : est un «observateur» réduit a erreur linéaire. Démonstration On pose : linéaire
22 L estimateur (algébrique) L estimateur (algébrique) avec
23 Conditions géométriques de la mise sous forme non linéaire. On considère le système non linéaire suivant : On suppose que la paire est observable
24 Construction du changement de coordonnées. On considère les dérivées successives de On construit le champ de vecteurs Puis par induction :
25 Résultat principal cas «mon» sortie Théorème Il existe un changement de coordonnées qui transforme le système sous la forme canonique réduite ssi i) ii) la condition de non «mélange» est satisfaite Esquisse de la démonstration On complète la famille des par
26 Construction du changement de coordonnées. Puis on considère On pose Condition de non mélange
27 Exemple : obstruction à Il n existe pas de changement de coordonnées qui inter-change ces deux comportements. Ils ne sont pas topologiquement équivalents (ou conjugués) Et pourtant il existe un isomorphisme qui inter-change les vitesses des deux comportements!!!
28 Exemple suite : obstruction à On considère le repère suivant : Le crochet de Lie c est-à-dire n est pas fermée : ce diagramme n a pas de solution.
29 Un peu de géométrie différentielle la dérivée de Lie d une fonction dans la direction de Le crochet de Lie de par L obstruction pour la fermeture
30 Lemme d intégrabilité Considérer formes linéairement indépendantes C est un isomorphisme sur l espace des champs de vecteurs Considérer un repère tels que : Repère canonique
31 Lemme d intégrabilité Les assertions suivantes sont équivalente : i) pour ii) pour iii) Il existe un changement de coordonnées (locale) tel que : iv) est un isomorphisme de l algèbre de Lie Démonstration comme et alors
32 Exemple On considère FCON réduite
33 Cas multi sorties. On considère le système non linéaire suivant : est une matrice inversible On suppose que la paire est observable Avec la condition supplémentaire (voir diapo 20 pour l existence de l estimateur algébrique) d existence d une fonction telle que : où Condition d integrabilité
34 Problème 1) Lire le papier 2) Trouver la forme normale correspondante.
35 Références [1] Boutat D., G. Zheng and Hammouri H. A nonlinear canonical form for reduced order observer design Nolcos 2010 [2] Krener A.J., A. Isidori (1983). Linearization by output injection and nonlinear observer. Systems and Control Letters 3, [3] Krener A.J., W. Respondek (1985). Nonlinear observer with linearizable error dynamics. SIAM J. Control and Optimization 30, [4] Xia X.H., Gao W.B, Nonlinear observer design by observer error linearization, SIAM Journal on Control an Optimization, v.27 n.1, p [5] D.G. Luenberger, Observing the state of a linear system, IEEE Trans. Mil. Electron. 8 (1964) [6] M. Darouach, Existence and design of functional observers for linear systems, IEEE Trans. Automat. Control, vol. AC-45, pp , [7] Boutat D., A. Benali H. Hammouri (2007). Geometrical conditions for observer error linearization linearization with a diffeomorphism on the outputs. Nolcos [8] Boutat D., G. Zheng J.P. Barbot H. Hammouri (2006). Observer error linearization multi-output depending. IEEE CDC 45, [9] Boutat D., Geometrical conditions for observer error linearization via Nolcos [10] V. Sundarapandian, Reduced order observer design for discrete-time nonlinear systems, Appl. Math. Lett, vol. 19, pp , [11] Boutat D. and Busawon K. Extended Nonlinear Observable Canonical Form for Multi-Output Dynamical Systems IEEE CDC 2009 [13] D. Boutat A. Benali H. Hammouri K. Busawon Newalgorithmfor observer error linearizationwitha di eomorphismon the outputs. Automatica.
36 Les systèmes : temps discret Boutat, Baddas et Darouach inversible Continu discret
37
www.h-k.fr/publications/objectif-agregation
 «Sur C, tout est connexe!» www.h-k.fr/publications/objectif-agregation L idée de cette note est de montrer que, contrairement à ce qui se passe sur R, «sur C, tout est connexe». Cet abus de langage se
«Sur C, tout est connexe!» www.h-k.fr/publications/objectif-agregation L idée de cette note est de montrer que, contrairement à ce qui se passe sur R, «sur C, tout est connexe». Cet abus de langage se
Proposition. Si G est un groupe simple d ordre 60 alors G est isomorphe à A 5.
 DÉVELOPPEMENT 32 A 5 EST LE SEUL GROUPE SIMPLE D ORDRE 60 Proposition. Si G est un groupe simple d ordre 60 alors G est isomorphe à A 5. Démonstration. On considère un groupe G d ordre 60 = 2 2 3 5 et
DÉVELOPPEMENT 32 A 5 EST LE SEUL GROUPE SIMPLE D ORDRE 60 Proposition. Si G est un groupe simple d ordre 60 alors G est isomorphe à A 5. Démonstration. On considère un groupe G d ordre 60 = 2 2 3 5 et
Théorème du point fixe - Théorème de l inversion locale
 Chapitre 7 Théorème du point fixe - Théorème de l inversion locale Dans ce chapitre et le suivant, on montre deux applications importantes de la notion de différentiabilité : le théorème de l inversion
Chapitre 7 Théorème du point fixe - Théorème de l inversion locale Dans ce chapitre et le suivant, on montre deux applications importantes de la notion de différentiabilité : le théorème de l inversion
Filtrage stochastique non linéaire par la théorie de représentation des martingales
 Filtrage stochastique non linéaire par la théorie de représentation des martingales Adriana Climescu-Haulica Laboratoire de Modélisation et Calcul Institut d Informatique et Mathématiques Appliquées de
Filtrage stochastique non linéaire par la théorie de représentation des martingales Adriana Climescu-Haulica Laboratoire de Modélisation et Calcul Institut d Informatique et Mathématiques Appliquées de
Optimisation des fonctions de plusieurs variables
 Optimisation des fonctions de plusieurs variables Hervé Hocquard Université de Bordeaux, France 8 avril 2013 Extrema locaux et globaux Définition On étudie le comportement d une fonction de plusieurs variables
Optimisation des fonctions de plusieurs variables Hervé Hocquard Université de Bordeaux, France 8 avril 2013 Extrema locaux et globaux Définition On étudie le comportement d une fonction de plusieurs variables
Calcul différentiel sur R n Première partie
 Calcul différentiel sur R n Première partie Université De Metz 2006-2007 1 Définitions générales On note L(R n, R m ) l espace vectoriel des applications linéaires de R n dans R m. Définition 1.1 (différentiabilité
Calcul différentiel sur R n Première partie Université De Metz 2006-2007 1 Définitions générales On note L(R n, R m ) l espace vectoriel des applications linéaires de R n dans R m. Définition 1.1 (différentiabilité
F1C1/ Analyse. El Hadji Malick DIA
 F1C1/ Analyse Présenté par : El Hadji Malick DIA [email protected] Description sommaire du cours Porte sur l analyse réelle propose des outils de travail sur des éléments de topologie élémentaire
F1C1/ Analyse Présenté par : El Hadji Malick DIA [email protected] Description sommaire du cours Porte sur l analyse réelle propose des outils de travail sur des éléments de topologie élémentaire
FIMA, 7 juillet 2005
 F. Corset 1 S. 2 1 LabSAD Université Pierre Mendes France 2 Département de Mathématiques Université de Franche-Comté FIMA, 7 juillet 2005 Plan de l exposé plus court chemin Origine du problème Modélisation
F. Corset 1 S. 2 1 LabSAD Université Pierre Mendes France 2 Département de Mathématiques Université de Franche-Comté FIMA, 7 juillet 2005 Plan de l exposé plus court chemin Origine du problème Modélisation
Simulation de variables aléatoires
 Chapter 1 Simulation de variables aléatoires Références: [F] Fishman, A first course in Monte Carlo, chap 3. [B] Bouleau, Probabilités de l ingénieur, chap 4. [R] Rubinstein, Simulation and Monte Carlo
Chapter 1 Simulation de variables aléatoires Références: [F] Fishman, A first course in Monte Carlo, chap 3. [B] Bouleau, Probabilités de l ingénieur, chap 4. [R] Rubinstein, Simulation and Monte Carlo
Calcul différentiel. Chapitre 1. 1.1 Différentiabilité
 Chapitre 1 Calcul différentiel L idée du calcul différentiel est d approcher au voisinage d un point une fonction f par une fonction plus simple (ou d approcher localement le graphe de f par un espace
Chapitre 1 Calcul différentiel L idée du calcul différentiel est d approcher au voisinage d un point une fonction f par une fonction plus simple (ou d approcher localement le graphe de f par un espace
Représentation et analyse des systèmes linéaires
 ISAE-NK/Première année présentation et analyse des systèmes linéaires Petite classe No Compléments sur le lieu des racines. Condition sur les points de rencontre et d éclatement Les points de rencontre,(les
ISAE-NK/Première année présentation et analyse des systèmes linéaires Petite classe No Compléments sur le lieu des racines. Condition sur les points de rencontre et d éclatement Les points de rencontre,(les
Formes quadratiques. 1 Formes quadratiques et formes polaires associées. Imen BHOURI. 1.1 Définitions
 Formes quadratiques Imen BHOURI 1 Ce cours s adresse aux étudiants de niveau deuxième année de Licence et à ceux qui préparent le capes. Il combine d une façon indissociable l étude des concepts bilinéaires
Formes quadratiques Imen BHOURI 1 Ce cours s adresse aux étudiants de niveau deuxième année de Licence et à ceux qui préparent le capes. Il combine d une façon indissociable l étude des concepts bilinéaires
Souad EL Bernoussi. Groupe d Analyse Numérique et Optimisation Rabat http ://www.fsr.ac.ma/ano/
 Recherche opérationnelle Les démonstrations et les exemples seront traités en cours Souad EL Bernoussi Groupe d Analyse Numérique et Optimisation Rabat http ://www.fsr.ac.ma/ano/ Table des matières 1 Programmation
Recherche opérationnelle Les démonstrations et les exemples seront traités en cours Souad EL Bernoussi Groupe d Analyse Numérique et Optimisation Rabat http ://www.fsr.ac.ma/ano/ Table des matières 1 Programmation
CHAPITRE V SYSTEMES DIFFERENTIELS LINEAIRES A COEFFICIENTS CONSTANTS DU PREMIER ORDRE. EQUATIONS DIFFERENTIELLES.
 CHAPITRE V SYSTEMES DIFFERENTIELS LINEAIRES A COEFFICIENTS CONSTANTS DU PREMIER ORDRE EQUATIONS DIFFERENTIELLES Le but de ce chapitre est la résolution des deux types de systèmes différentiels linéaires
CHAPITRE V SYSTEMES DIFFERENTIELS LINEAIRES A COEFFICIENTS CONSTANTS DU PREMIER ORDRE EQUATIONS DIFFERENTIELLES Le but de ce chapitre est la résolution des deux types de systèmes différentiels linéaires
Correction de l examen de la première session
 de l examen de la première session Julian Tugaut, Franck Licini, Didier Vincent Si vous trouvez des erreurs de Français ou de mathématiques ou bien si vous avez des questions et/ou des suggestions, envoyez-moi
de l examen de la première session Julian Tugaut, Franck Licini, Didier Vincent Si vous trouvez des erreurs de Français ou de mathématiques ou bien si vous avez des questions et/ou des suggestions, envoyez-moi
Structures algébriques
 Structures algébriques 1. Lois de composition s Soit E un ensemble. Une loi de composition interne sur E est une application de E E dans E. Soient E et F deux ensembles. Une loi de composition externe
Structures algébriques 1. Lois de composition s Soit E un ensemble. Une loi de composition interne sur E est une application de E E dans E. Soient E et F deux ensembles. Une loi de composition externe
Intégration et probabilités TD1 Espaces mesurés Corrigé
 Intégration et probabilités TD1 Espaces mesurés Corrigé 2012-2013 1 Petites questions 1 Est-ce que l ensemble des ouverts de R est une tribu? Réponse : Non, car le complémentaire de ], 0[ n est pas ouvert.
Intégration et probabilités TD1 Espaces mesurés Corrigé 2012-2013 1 Petites questions 1 Est-ce que l ensemble des ouverts de R est une tribu? Réponse : Non, car le complémentaire de ], 0[ n est pas ouvert.
Tests non-paramétriques de non-effet et d adéquation pour des covariables fonctionnelles
 Tests non-paramétriques de non-effet et d adéquation pour des covariables fonctionnelles Valentin Patilea 1 Cesar Sanchez-sellero 2 Matthieu Saumard 3 1 CREST-ENSAI et IRMAR 2 USC Espagne 3 IRMAR-INSA
Tests non-paramétriques de non-effet et d adéquation pour des covariables fonctionnelles Valentin Patilea 1 Cesar Sanchez-sellero 2 Matthieu Saumard 3 1 CREST-ENSAI et IRMAR 2 USC Espagne 3 IRMAR-INSA
Cours d Analyse. Fonctions de plusieurs variables
 Cours d Analyse Fonctions de plusieurs variables Licence 1ère année 2007/2008 Nicolas Prioux Université de Marne-la-Vallée Table des matières 1 Notions de géométrie dans l espace et fonctions à deux variables........
Cours d Analyse Fonctions de plusieurs variables Licence 1ère année 2007/2008 Nicolas Prioux Université de Marne-la-Vallée Table des matières 1 Notions de géométrie dans l espace et fonctions à deux variables........
3 Approximation de solutions d équations
 3 Approximation de solutions d équations Une équation scalaire a la forme générale f(x) =0où f est une fonction de IR dans IR. Un système de n équations à n inconnues peut aussi se mettre sous une telle
3 Approximation de solutions d équations Une équation scalaire a la forme générale f(x) =0où f est une fonction de IR dans IR. Un système de n équations à n inconnues peut aussi se mettre sous une telle
Analyse fonctionnelle Théorie des représentations du groupe quantique compact libre O(n) Teodor Banica Résumé - On trouve, pour chaque n 2, la classe
 Teodor Banica Résumé - On trouve, pour chaque n 2, la classe") Analyse fonctionnelle Théorie des représentations du groupe quantique compact libre O(n) Teodor Banica Résumé - On trouve, pour chaque n 2, la classe des n n groupes quantiques compacts qui ont la théorie
Analyse fonctionnelle Théorie des représentations du groupe quantique compact libre O(n) Teodor Banica Résumé - On trouve, pour chaque n 2, la classe des n n groupes quantiques compacts qui ont la théorie
Optimisation et programmation mathématique. Professeur Michel de Mathelin. Cours intégré : 20 h
 Télécom Physique Strasbourg Master IRIV Optimisation et programmation mathématique Professeur Michel de Mathelin Cours intégré : 20 h Programme du cours d optimisation Introduction Chapitre I: Rappels
Télécom Physique Strasbourg Master IRIV Optimisation et programmation mathématique Professeur Michel de Mathelin Cours intégré : 20 h Programme du cours d optimisation Introduction Chapitre I: Rappels
Problème 1 : applications du plan affine
 Problème 1 : applications du plan affine Notations On désigne par GL 2 (R) l ensemble des matrices 2 2 inversibles à coefficients réels. Soit un plan affine P muni d un repère (O, I, J). Les coordonnées
Problème 1 : applications du plan affine Notations On désigne par GL 2 (R) l ensemble des matrices 2 2 inversibles à coefficients réels. Soit un plan affine P muni d un repère (O, I, J). Les coordonnées
Intégration et probabilités TD1 Espaces mesurés
 Intégration et probabilités TD1 Espaces mesurés 2012-2013 1 Petites questions 1) Est-ce que l ensemble des ouverts de R est une tribu? 2) Si F et G sont deux tribus, est-ce que F G est toujours une tribu?
Intégration et probabilités TD1 Espaces mesurés 2012-2013 1 Petites questions 1) Est-ce que l ensemble des ouverts de R est une tribu? 2) Si F et G sont deux tribus, est-ce que F G est toujours une tribu?
I Stabilité, Commandabilité et Observabilité 11. 1 Introduction 13 1.1 Un exemple emprunté à la robotique... 13 1.2 Le plan... 18 1.3 Problème...
 TABLE DES MATIÈRES 5 Table des matières I Stabilité, Commandabilité et Observabilité 11 1 Introduction 13 1.1 Un exemple emprunté à la robotique................... 13 1.2 Le plan...................................
TABLE DES MATIÈRES 5 Table des matières I Stabilité, Commandabilité et Observabilité 11 1 Introduction 13 1.1 Un exemple emprunté à la robotique................... 13 1.2 Le plan...................................
Fonctions de plusieurs variables
 Module : Analyse 03 Chapitre 00 : Fonctions de plusieurs variables Généralités et Rappels des notions topologiques dans : Qu est- ce que?: Mathématiquement, n étant un entier non nul, on définit comme
Module : Analyse 03 Chapitre 00 : Fonctions de plusieurs variables Généralités et Rappels des notions topologiques dans : Qu est- ce que?: Mathématiquement, n étant un entier non nul, on définit comme
Chapitre VI Fonctions de plusieurs variables
 Chapitre VI Fonctions de plusieurs variables 6. 1 Fonctions différentiables de R 2 dans R. 6. 1. 1 Définition de la différentiabilité Nous introduisons la différentiabilité sous l angle des développements
Chapitre VI Fonctions de plusieurs variables 6. 1 Fonctions différentiables de R 2 dans R. 6. 1. 1 Définition de la différentiabilité Nous introduisons la différentiabilité sous l angle des développements
Programmation linéaire
 Programmation linéaire DIDIER MAQUIN Ecole Nationale Supérieure d Electricité et de Mécanique Institut National Polytechnique de Lorraine Mathématiques discrètes cours de 2ème année Programmation linéaire
Programmation linéaire DIDIER MAQUIN Ecole Nationale Supérieure d Electricité et de Mécanique Institut National Polytechnique de Lorraine Mathématiques discrètes cours de 2ème année Programmation linéaire
Théorie et codage de l information
 Théorie et codage de l information Les codes linéaires - Chapitre 6 - Principe Définition d un code linéaire Soient p un nombre premier et s est un entier positif. Il existe un unique corps de taille q
Théorie et codage de l information Les codes linéaires - Chapitre 6 - Principe Définition d un code linéaire Soient p un nombre premier et s est un entier positif. Il existe un unique corps de taille q
La Licence Mathématiques et Economie-MASS Université de Sciences Sociales de Toulouse 1
 La Licence Mathématiques et Economie-MASS Université de Sciences Sociales de Toulouse 1 La licence Mathématiques et Economie-MASS de l Université des Sciences Sociales de Toulouse propose sur les trois
La Licence Mathématiques et Economie-MASS Université de Sciences Sociales de Toulouse 1 La licence Mathématiques et Economie-MASS de l Université des Sciences Sociales de Toulouse propose sur les trois
Une forme générale de la conjecture abc
 Une forme générale de la conjecture abc Nicolas Billerey avec l aide de Manuel Pégourié-Gonnard 6 août 2009 Dans [Lan99a], M Langevin montre que la conjecture abc est équivalente à la conjecture suivante
Une forme générale de la conjecture abc Nicolas Billerey avec l aide de Manuel Pégourié-Gonnard 6 août 2009 Dans [Lan99a], M Langevin montre que la conjecture abc est équivalente à la conjecture suivante
Exo7. Matrice d une application linéaire. Corrections d Arnaud Bodin.
 Exo7 Matrice d une application linéaire Corrections d Arnaud odin. Exercice Soit R muni de la base canonique = ( i, j). Soit f : R R la projection sur l axe des abscisses R i parallèlement à R( i + j).
Exo7 Matrice d une application linéaire Corrections d Arnaud odin. Exercice Soit R muni de la base canonique = ( i, j). Soit f : R R la projection sur l axe des abscisses R i parallèlement à R( i + j).
Calcul matriciel. Définition 1 Une matrice de format (m,n) est un tableau rectangulaire de mn éléments, rangés en m lignes et n colonnes.
 est un tableau rectangulaire de mn éléments, rangés en m lignes et n colonnes.") 1 Définitions, notations Calcul matriciel Définition 1 Une matrice de format (m,n) est un tableau rectangulaire de mn éléments, rangés en m lignes et n colonnes. On utilise aussi la notation m n pour le
1 Définitions, notations Calcul matriciel Définition 1 Une matrice de format (m,n) est un tableau rectangulaire de mn éléments, rangés en m lignes et n colonnes. On utilise aussi la notation m n pour le
Dualité dans les espaces de Lebesgue et mesures de Radon finies
 Chapitre 6 Dualité dans les espaces de Lebesgue et mesures de Radon finies Nous allons maintenant revenir sur les espaces L p du Chapitre 4, à la lumière de certains résultats du Chapitre 5. Sauf mention
Chapitre 6 Dualité dans les espaces de Lebesgue et mesures de Radon finies Nous allons maintenant revenir sur les espaces L p du Chapitre 4, à la lumière de certains résultats du Chapitre 5. Sauf mention
1 Première section: La construction générale
 AMALGAMATIONS DE CLASSES DE SOUS-GROUPES D UN GROUPE ABÉLIEN. SOUS-GROUPES ESSENTIEL-PURS. Călugăreanu Grigore comunicare prezentată la Conferinţa de grupuri abeliene şi module de la Padova, iunie 1994
AMALGAMATIONS DE CLASSES DE SOUS-GROUPES D UN GROUPE ABÉLIEN. SOUS-GROUPES ESSENTIEL-PURS. Călugăreanu Grigore comunicare prezentată la Conferinţa de grupuri abeliene şi module de la Padova, iunie 1994
AOT 13. et Application au Contrôle Géométrique
 AOT 13 Géométrie Différentielle et Application au Contrôle Géométrique Frédéric Jean Notes de cours Édition 2011/2012 ii Table des matières 1 Variétés différentiables 1 1.1 Variétés différentiables............................
AOT 13 Géométrie Différentielle et Application au Contrôle Géométrique Frédéric Jean Notes de cours Édition 2011/2012 ii Table des matières 1 Variétés différentiables 1 1.1 Variétés différentiables............................
Programmation linéaire
 1 Programmation linéaire 1. Le problème, un exemple. 2. Le cas b = 0 3. Théorème de dualité 4. L algorithme du simplexe 5. Problèmes équivalents 6. Complexité de l Algorithme 2 Position du problème Soit
1 Programmation linéaire 1. Le problème, un exemple. 2. Le cas b = 0 3. Théorème de dualité 4. L algorithme du simplexe 5. Problèmes équivalents 6. Complexité de l Algorithme 2 Position du problème Soit
Résolution de systèmes linéaires par des méthodes directes
 Résolution de systèmes linéaires par des méthodes directes J. Erhel Janvier 2014 1 Inverse d une matrice carrée et systèmes linéaires Ce paragraphe a pour objet les matrices carrées et les systèmes linéaires.
Résolution de systèmes linéaires par des méthodes directes J. Erhel Janvier 2014 1 Inverse d une matrice carrée et systèmes linéaires Ce paragraphe a pour objet les matrices carrées et les systèmes linéaires.
Approximations variationelles des EDP Notes du Cours de M2
 Approximations variationelles des EDP Notes du Cours de M2 Albert Cohen Dans ce cours, on s intéresse à l approximation numérique d équations aux dérivées partielles linéaires qui admettent une formulation
Approximations variationelles des EDP Notes du Cours de M2 Albert Cohen Dans ce cours, on s intéresse à l approximation numérique d équations aux dérivées partielles linéaires qui admettent une formulation
Le produit semi-direct
 Le produit semi-direct Préparation à l agrégation de mathématiques Université de Nice - Sophia Antipolis Antoine Ducros Octobre 2007 Ce texte est consacré, comme son titre l indique, au produit semi-direct.
Le produit semi-direct Préparation à l agrégation de mathématiques Université de Nice - Sophia Antipolis Antoine Ducros Octobre 2007 Ce texte est consacré, comme son titre l indique, au produit semi-direct.
ENSAE - DAKAR BROCHURE D'INFORMATION SUR LE CONCOURS DE RECRUTEMENT D ÉLÈVES INGÉNIEURS STATISTICIENS ÉCONOMISTES (I S E) Option Mathématiques CAPESA
 Option Mathématiques CAPESA") ENSEA - ABIDJAN ENSAE - DAKAR ISSEA - YAOUNDÉ BROCHURE D'INFORMATION SUR LE CONCOURS DE RECRUTEMENT D ÉLÈVES INGÉNIEURS STATISTICIENS ÉCONOMISTES (I S E) Option Mathématiques CAPESA CENTRE D APPUI AUX
ENSEA - ABIDJAN ENSAE - DAKAR ISSEA - YAOUNDÉ BROCHURE D'INFORMATION SUR LE CONCOURS DE RECRUTEMENT D ÉLÈVES INGÉNIEURS STATISTICIENS ÉCONOMISTES (I S E) Option Mathématiques CAPESA CENTRE D APPUI AUX
Différentiabilité ; Fonctions de plusieurs variables réelles
 Différentiabilité ; Fonctions de plusieurs variables réelles Denis Vekemans R n est muni de l une des trois normes usuelles. 1,. 2 ou.. x 1 = i i n Toutes les normes de R n sont équivalentes. x i ; x 2
Différentiabilité ; Fonctions de plusieurs variables réelles Denis Vekemans R n est muni de l une des trois normes usuelles. 1,. 2 ou.. x 1 = i i n Toutes les normes de R n sont équivalentes. x i ; x 2
Espérance conditionnelle
 Espérance conditionnelle Samy Tindel Nancy-Université Master 1 - Nancy Samy T. (IECN) M1 - Espérance conditionnelle Nancy-Université 1 / 58 Plan 1 Définition 2 Exemples 3 Propriétés de l espérance conditionnelle
Espérance conditionnelle Samy Tindel Nancy-Université Master 1 - Nancy Samy T. (IECN) M1 - Espérance conditionnelle Nancy-Université 1 / 58 Plan 1 Définition 2 Exemples 3 Propriétés de l espérance conditionnelle
Catalogue des connaissances de base en mathématiques dispensées dans les gymnases, lycées et collèges romands.
 Catalogue des connaissances de base en mathématiques dispensées dans les gymnases, lycées et collèges romands. Pourquoi un autre catalogue en Suisse romande Historique En 1990, la CRUS (Conférences des
Catalogue des connaissances de base en mathématiques dispensées dans les gymnases, lycées et collèges romands. Pourquoi un autre catalogue en Suisse romande Historique En 1990, la CRUS (Conférences des
Optimisation non linéaire Irène Charon, Olivier Hudry École nationale supérieure des télécommunications
 Optimisation non linéaire Irène Charon, Olivier Hudry École nationale supérieure des télécommunications A. Optimisation sans contrainte.... Généralités.... Condition nécessaire et condition suffisante
Optimisation non linéaire Irène Charon, Olivier Hudry École nationale supérieure des télécommunications A. Optimisation sans contrainte.... Généralités.... Condition nécessaire et condition suffisante
Chapitre 7. Statistique des échantillons gaussiens. 7.1 Projection de vecteurs gaussiens
 Chapitre 7 Statistique des échantillons gaussiens Le théorème central limite met en évidence le rôle majeur tenu par la loi gaussienne en modélisation stochastique. De ce fait, les modèles statistiques
Chapitre 7 Statistique des échantillons gaussiens Le théorème central limite met en évidence le rôle majeur tenu par la loi gaussienne en modélisation stochastique. De ce fait, les modèles statistiques
3. Conditionnement P (B)
") Conditionnement 16 3. Conditionnement Dans cette section, nous allons rappeler un certain nombre de définitions et de propriétés liées au problème du conditionnement, c est à dire à la prise en compte
Conditionnement 16 3. Conditionnement Dans cette section, nous allons rappeler un certain nombre de définitions et de propriétés liées au problème du conditionnement, c est à dire à la prise en compte
Programme de la classe de première année MPSI
 Objectifs Programme de la classe de première année MPSI I - Introduction à l analyse L objectif de cette partie est d amener les étudiants vers des problèmes effectifs d analyse élémentaire, d introduire
Objectifs Programme de la classe de première année MPSI I - Introduction à l analyse L objectif de cette partie est d amener les étudiants vers des problèmes effectifs d analyse élémentaire, d introduire
Programmes des classes préparatoires aux Grandes Ecoles
 Programmes des classes préparatoires aux Grandes Ecoles Filière : scientifique Voie : Biologie, chimie, physique et sciences de la Terre (BCPST) Discipline : Mathématiques Seconde année Préambule Programme
Programmes des classes préparatoires aux Grandes Ecoles Filière : scientifique Voie : Biologie, chimie, physique et sciences de la Terre (BCPST) Discipline : Mathématiques Seconde année Préambule Programme
Groupe symétrique. Chapitre II. 1 Définitions et généralités
 Chapitre II Groupe symétrique 1 Définitions et généralités Définition. Soient n et X l ensemble 1,..., n. On appelle permutation de X toute application bijective f : X X. On note S n l ensemble des permutations
Chapitre II Groupe symétrique 1 Définitions et généralités Définition. Soient n et X l ensemble 1,..., n. On appelle permutation de X toute application bijective f : X X. On note S n l ensemble des permutations
Résolution d équations non linéaires
 Analyse Numérique Résolution d équations non linéaires Said EL HAJJI et Touria GHEMIRES Université Mohammed V - Agdal. Faculté des Sciences Département de Mathématiques. Laboratoire de Mathématiques, Informatique
Analyse Numérique Résolution d équations non linéaires Said EL HAJJI et Touria GHEMIRES Université Mohammed V - Agdal. Faculté des Sciences Département de Mathématiques. Laboratoire de Mathématiques, Informatique
Optimisation Discrète
 Prof F Eisenbrand EPFL - DISOPT Optimisation Discrète Adrian Bock Semestre de printemps 2011 Série 7 7 avril 2011 Exercice 1 i Considérer le programme linéaire max{c T x : Ax b} avec c R n, A R m n et
Prof F Eisenbrand EPFL - DISOPT Optimisation Discrète Adrian Bock Semestre de printemps 2011 Série 7 7 avril 2011 Exercice 1 i Considérer le programme linéaire max{c T x : Ax b} avec c R n, A R m n et
Continuité d une fonction de plusieurs variables
 Chapitre 2 Continuité d une fonction de plusieurs variables Maintenant qu on a défini la notion de limite pour des suites dans R n, la notion de continuité s étend sans problème à des fonctions de plusieurs
Chapitre 2 Continuité d une fonction de plusieurs variables Maintenant qu on a défini la notion de limite pour des suites dans R n, la notion de continuité s étend sans problème à des fonctions de plusieurs
Texte Agrégation limitée par diffusion interne
 Page n 1. Texte Agrégation limitée par diffusion interne 1 Le phénomène observé Un fût de déchets radioactifs est enterré secrètement dans le Cantal. Au bout de quelques années, il devient poreux et laisse
Page n 1. Texte Agrégation limitée par diffusion interne 1 Le phénomène observé Un fût de déchets radioactifs est enterré secrètement dans le Cantal. Au bout de quelques années, il devient poreux et laisse
aux différences est appelé équation aux différences d ordre n en forme normale.
 MODÉLISATION ET SIMULATION EQUATIONS AUX DIFFÉRENCES (I/II) 1. Rappels théoriques : résolution d équations aux différences 1.1. Équations aux différences. Définition. Soit x k = x(k) X l état scalaire
MODÉLISATION ET SIMULATION EQUATIONS AUX DIFFÉRENCES (I/II) 1. Rappels théoriques : résolution d équations aux différences 1.1. Équations aux différences. Définition. Soit x k = x(k) X l état scalaire
Baccalauréat ES Pondichéry 7 avril 2014 Corrigé
 Baccalauréat ES Pondichéry 7 avril 204 Corrigé EXERCICE 4 points Commun à tous les candidats. Proposition fausse. La tangente T, passant par les points A et B d abscisses distinctes, a pour coefficient
Baccalauréat ES Pondichéry 7 avril 204 Corrigé EXERCICE 4 points Commun à tous les candidats. Proposition fausse. La tangente T, passant par les points A et B d abscisses distinctes, a pour coefficient
Sites web éducatifs et ressources en mathématiques
 Sites web éducatifs et ressources en mathématiques Exercices en ligne pour le primaire Calcul mental élémentaire : http://www.csaffluents.qc.ca/wlamen/tables-sous.html Problèmes de soustraction/addition
Sites web éducatifs et ressources en mathématiques Exercices en ligne pour le primaire Calcul mental élémentaire : http://www.csaffluents.qc.ca/wlamen/tables-sous.html Problèmes de soustraction/addition
La Longue Marche à travers la théorie de Galois, Part Ib, 26-37
 La Longue Marche à travers la théorie de Galois, Part Ib, 26-37 26. Groupes de Teichmüller profinis (Discrétification et prédiscrétification) Soit π un groupe profini à lacets de type g, ν, T le Ẑ-module
La Longue Marche à travers la théorie de Galois, Part Ib, 26-37 26. Groupes de Teichmüller profinis (Discrétification et prédiscrétification) Soit π un groupe profini à lacets de type g, ν, T le Ẑ-module
Algorithmes pour la planification de mouvements en robotique non-holonome
 Algorithmes pour la planification de mouvements en robotique non-holonome Frédéric Jean Unité de Mathématiques Appliquées ENSTA Le 02 février 2006 Outline 1 2 3 Modélisation Géométrique d un Robot Robot
Algorithmes pour la planification de mouvements en robotique non-holonome Frédéric Jean Unité de Mathématiques Appliquées ENSTA Le 02 février 2006 Outline 1 2 3 Modélisation Géométrique d un Robot Robot
Moments des variables aléatoires réelles
 Chapter 6 Moments des variables aléatoires réelles Sommaire 6.1 Espérance des variables aléatoires réelles................................ 46 6.1.1 Définition et calcul........................................
Chapter 6 Moments des variables aléatoires réelles Sommaire 6.1 Espérance des variables aléatoires réelles................................ 46 6.1.1 Définition et calcul........................................
L isomorphisme entre les tours de Lubin-Tate et de Drinfeld et applications cohomologiques par Laurent Fargues
 Préambule.................................... xv Bibliographie... xxi I L isomorphisme entre les tours de Lubin-Tate et de Drinfeld et applications cohomologiques par Laurent Fargues Introduction...................................
Préambule.................................... xv Bibliographie... xxi I L isomorphisme entre les tours de Lubin-Tate et de Drinfeld et applications cohomologiques par Laurent Fargues Introduction...................................
Logique. Plan du chapitre
 Logique Ce chapitre est assez abstrait en première lecture, mais est (avec le chapitre suivant «Ensembles») probablement le plus important de l année car il est à la base de tous les raisonnements usuels
Logique Ce chapitre est assez abstrait en première lecture, mais est (avec le chapitre suivant «Ensembles») probablement le plus important de l année car il est à la base de tous les raisonnements usuels
Contexte. Pour cela, elles doivent être très compliquées, c est-à-dire elles doivent être très différentes des fonctions simples,
 Non-linéarité Contexte Pour permettre aux algorithmes de cryptographie d être sûrs, les fonctions booléennes qu ils utilisent ne doivent pas être inversées facilement. Pour cela, elles doivent être très
Non-linéarité Contexte Pour permettre aux algorithmes de cryptographie d être sûrs, les fonctions booléennes qu ils utilisent ne doivent pas être inversées facilement. Pour cela, elles doivent être très
Exercices - Polynômes : corrigé. Opérations sur les polynômes
 Opérations sur les polynômes Exercice 1 - Carré - L1/Math Sup - Si P = Q est le carré d un polynôme, alors Q est nécessairement de degré, et son coefficient dominant est égal à 1. On peut donc écrire Q(X)
Opérations sur les polynômes Exercice 1 - Carré - L1/Math Sup - Si P = Q est le carré d un polynôme, alors Q est nécessairement de degré, et son coefficient dominant est égal à 1. On peut donc écrire Q(X)
Cours d Analyse 3 Fonctions de plusieurs variables
 Université Claude Bernard, Lyon I Licence Sciences, Technologies & Santé 43, boulevard 11 novembre 1918 Spécialité Mathématiques 69622 Villeurbanne cedex, France L. Pujo-Menjouet [email protected]
Université Claude Bernard, Lyon I Licence Sciences, Technologies & Santé 43, boulevard 11 novembre 1918 Spécialité Mathématiques 69622 Villeurbanne cedex, France L. Pujo-Menjouet [email protected]
Capes 2002 - Première épreuve
 Cette correction a été rédigée par Frédéric Bayart. Si vous avez des remarques à faire, ou pour signaler des erreurs, n hésitez pas à écrire à : [email protected] Mots-clés : équation fonctionnelle, série
Cette correction a été rédigée par Frédéric Bayart. Si vous avez des remarques à faire, ou pour signaler des erreurs, n hésitez pas à écrire à : [email protected] Mots-clés : équation fonctionnelle, série
= 1 si n = m& où n et m sont souvent des indices entiers, par exemple, n, m = 0, 1, 2, 3, 4... En fait,! n m
 1 épartement de Physique, Université Laval, Québec Pierre Amiot, 1. La fonction delta et certaines de ses utilisations. Clientèle Ce texte est destiné aux physiciens, ingénieurs et autres scientifiques.
1 épartement de Physique, Université Laval, Québec Pierre Amiot, 1. La fonction delta et certaines de ses utilisations. Clientèle Ce texte est destiné aux physiciens, ingénieurs et autres scientifiques.
La programmation linéaire : une introduction. Qu est-ce qu un programme linéaire? Terminologie. Écriture mathématique
 La programmation linéaire : une introduction Qu est-ce qu un programme linéaire? Qu est-ce qu un programme linéaire? Exemples : allocation de ressources problème de recouvrement Hypothèses de la programmation
La programmation linéaire : une introduction Qu est-ce qu un programme linéaire? Qu est-ce qu un programme linéaire? Exemples : allocation de ressources problème de recouvrement Hypothèses de la programmation
Groupoïdes quantiques mesurés : axiomatique, étude, dualité, exemples
 Groupoïdes quantiques mesurés : axiomatique, étude, dualité, exemples Franck LESIEUR Mathématiques et Applications, Physique Mathématique d Orléans UMR 6628 - BP 6759 45067 ORLEANS CEDEX 2 - FRANCE e-mail
Groupoïdes quantiques mesurés : axiomatique, étude, dualité, exemples Franck LESIEUR Mathématiques et Applications, Physique Mathématique d Orléans UMR 6628 - BP 6759 45067 ORLEANS CEDEX 2 - FRANCE e-mail
De même, le périmètre P d un cercle de rayon 1 vaut P = 2π (par définition de π). Mais, on peut démontrer (difficilement!) que
. Mais, on peut démontrer (difficilement!) que") Introduction. On suppose connus les ensembles N (des entiers naturels), Z des entiers relatifs et Q (des nombres rationnels). On s est rendu compte, depuis l antiquité, que l on ne peut pas tout mesurer
Introduction. On suppose connus les ensembles N (des entiers naturels), Z des entiers relatifs et Q (des nombres rationnels). On s est rendu compte, depuis l antiquité, que l on ne peut pas tout mesurer
CONTRÔLE ET ÉQUATIONS AUX DÉRIVÉES PARTIELLES. par. Jean-Pierre Puel
 CONTRÔLE ET ÉQUATIONS AUX DÉRIVÉES PARTIELLES par Jean-Pierre Puel 1. Introduction Pourquoi équations aux dérivées partielles et pourquoi contrôle? Les équations aux dérivées partielles, associées à certaines
CONTRÔLE ET ÉQUATIONS AUX DÉRIVÉES PARTIELLES par Jean-Pierre Puel 1. Introduction Pourquoi équations aux dérivées partielles et pourquoi contrôle? Les équations aux dérivées partielles, associées à certaines
Calcul Différentiel. I Fonctions différentiables 3
 Université de la Méditerranée Faculté des Sciences de Luminy Licence de Mathématiques, Semestre 5, année 2008-2009 Calcul Différentiel Support du cours de Glenn Merlet 1, version du 6 octobre 2008. Remarques
Université de la Méditerranée Faculté des Sciences de Luminy Licence de Mathématiques, Semestre 5, année 2008-2009 Calcul Différentiel Support du cours de Glenn Merlet 1, version du 6 octobre 2008. Remarques
Corps des nombres complexes, J Paul Tsasa
 Corps des nombres complexes, J Paul Tsasa One Pager Février 2013 Vol. 5 Num. 011 Copyright Laréq 2013 http://www.lareq.com Corps des Nombres Complexes Définitions, Règles de Calcul et Théorèmes «Les idiots
Corps des nombres complexes, J Paul Tsasa One Pager Février 2013 Vol. 5 Num. 011 Copyright Laréq 2013 http://www.lareq.com Corps des Nombres Complexes Définitions, Règles de Calcul et Théorèmes «Les idiots
Contrôle par commande prédictive d un procédé de cuisson sous infrarouge de peintures en poudre.
 Contrôle par commande prédictive d un procédé de cuisson sous infrarouge de peintures en poudre. Isabelle Bombard, Bruno da Silva, Pascal Dufour *, Pierre Laurent, Joseph Lieto. Laboratoire d Automatique
Contrôle par commande prédictive d un procédé de cuisson sous infrarouge de peintures en poudre. Isabelle Bombard, Bruno da Silva, Pascal Dufour *, Pierre Laurent, Joseph Lieto. Laboratoire d Automatique
Première partie. Préliminaires : noyaux itérés. MPSI B 6 juin 2015
 Énoncé Soit V un espace vectoriel réel. L espace vectoriel des endomorphismes de V est désigné par L(V ). Lorsque f L(V ) et k N, on désigne par f 0 = Id V, f k = f k f la composée de f avec lui même k
Énoncé Soit V un espace vectoriel réel. L espace vectoriel des endomorphismes de V est désigné par L(V ). Lorsque f L(V ) et k N, on désigne par f 0 = Id V, f k = f k f la composée de f avec lui même k
Un K-espace vectoriel est un ensemble non vide E muni : d une loi de composition interne, c est-à-dire d une application de E E dans E : E E E
 Exo7 Espaces vectoriels Vidéo partie 1. Espace vectoriel (début Vidéo partie 2. Espace vectoriel (fin Vidéo partie 3. Sous-espace vectoriel (début Vidéo partie 4. Sous-espace vectoriel (milieu Vidéo partie
Exo7 Espaces vectoriels Vidéo partie 1. Espace vectoriel (début Vidéo partie 2. Espace vectoriel (fin Vidéo partie 3. Sous-espace vectoriel (début Vidéo partie 4. Sous-espace vectoriel (milieu Vidéo partie
1 Complément sur la projection du nuage des individus
 TP 0 : Analyse en composantes principales (II) Le but de ce TP est d approfondir nos connaissances concernant l analyse en composantes principales (ACP). Pour cela, on reprend les notations du précédent
TP 0 : Analyse en composantes principales (II) Le but de ce TP est d approfondir nos connaissances concernant l analyse en composantes principales (ACP). Pour cela, on reprend les notations du précédent
Exo7. Calculs de déterminants. Fiche corrigée par Arnaud Bodin. Exercice 1 Calculer les déterminants des matrices suivantes : Exercice 2.
 Eo7 Calculs de déterminants Fiche corrigée par Arnaud Bodin Eercice Calculer les déterminants des matrices suivantes : Correction Vidéo ( ) 0 6 7 3 4 5 8 4 5 6 0 3 4 5 5 6 7 0 3 5 4 3 0 3 0 0 3 0 0 0 3
Eo7 Calculs de déterminants Fiche corrigée par Arnaud Bodin Eercice Calculer les déterminants des matrices suivantes : Correction Vidéo ( ) 0 6 7 3 4 5 8 4 5 6 0 3 4 5 5 6 7 0 3 5 4 3 0 3 0 0 3 0 0 0 3
Commun à tous les candidats
 EXERCICE 3 (9 points ) Commun à tous les candidats On s intéresse à des courbes servant de modèle à la distribution de la masse salariale d une entreprise. Les fonctions f associées définies sur l intervalle
EXERCICE 3 (9 points ) Commun à tous les candidats On s intéresse à des courbes servant de modèle à la distribution de la masse salariale d une entreprise. Les fonctions f associées définies sur l intervalle
I. Ensemble de définition d'une fonction
 Chapitre 2 Généralités sur les fonctions Fonctions de références et fonctions associées Ce que dit le programme : Étude de fonctions Fonctions de référence x x et x x Connaître les variations de ces deux
Chapitre 2 Généralités sur les fonctions Fonctions de références et fonctions associées Ce que dit le programme : Étude de fonctions Fonctions de référence x x et x x Connaître les variations de ces deux
Fonctions de plusieurs variables : dérivés partielles, diérentielle. Fonctions composées. Fonctions de classe C 1. Exemples
 45 Fonctions de plusieurs variables : dérivés partielles, diérentielle. Fonctions composées. Fonctions de classe C 1. Exemples Les espaces vectoriels considérés sont réels, non réduits au vecteur nul et
45 Fonctions de plusieurs variables : dérivés partielles, diérentielle. Fonctions composées. Fonctions de classe C 1. Exemples Les espaces vectoriels considérés sont réels, non réduits au vecteur nul et
Modèles bi-dimensionnels de coques linéairement élastiques: Estimations de l écart entre leurs solutions.
 Problèmes mathématiques de la mécanique/mathematical problems in Mechanics Modèles bi-dimensionnels de coques linéairement élastiques: Estimations de l écart entre leurs solutions. Cristinel Mardare Laboratoire
Problèmes mathématiques de la mécanique/mathematical problems in Mechanics Modèles bi-dimensionnels de coques linéairement élastiques: Estimations de l écart entre leurs solutions. Cristinel Mardare Laboratoire
Dérivées d ordres supérieurs. Application à l étude d extrema.
 Chapitre 5 Dérivées d ordres supérieurs. Application à l étude d extrema. On s intéresse dans ce chapitre aux dérivées d ordre ou plus d une fonction de plusieurs variables. Comme pour une fonction d une
Chapitre 5 Dérivées d ordres supérieurs. Application à l étude d extrema. On s intéresse dans ce chapitre aux dérivées d ordre ou plus d une fonction de plusieurs variables. Comme pour une fonction d une
Baccalauréat S Antilles-Guyane 11 septembre 2014 Corrigé
 Baccalauréat S ntilles-guyane 11 septembre 14 Corrigé EXERCICE 1 6 points Commun à tous les candidats Une entreprise de jouets en peluche souhaite commercialiser un nouveau produit et à cette fin, effectue
Baccalauréat S ntilles-guyane 11 septembre 14 Corrigé EXERCICE 1 6 points Commun à tous les candidats Une entreprise de jouets en peluche souhaite commercialiser un nouveau produit et à cette fin, effectue
SUR CERTAINS SYSTEMES D EQUATIONS AVEC CONTRAINTES DANS UN GROUPE LIBRE (*)
") PORTUGALIAE MATHEMATICA Vol. 56 Fasc. 4 1999 SUR CERTAINS SYSTEMES D EQUATIONS AVEC CONTRAINTES DANS UN GROUPE LIBRE (*) J. Almeida and M. Delgado Résumé: Le théorème principal trouvé par Ash pour sa preuve
PORTUGALIAE MATHEMATICA Vol. 56 Fasc. 4 1999 SUR CERTAINS SYSTEMES D EQUATIONS AVEC CONTRAINTES DANS UN GROUPE LIBRE (*) J. Almeida and M. Delgado Résumé: Le théorème principal trouvé par Ash pour sa preuve
Développement décimal d un réel
 4 Développement décimal d un réel On rappelle que le corps R des nombres réels est archimédien, ce qui permet d y définir la fonction partie entière. En utilisant cette partie entière on verra dans ce
4 Développement décimal d un réel On rappelle que le corps R des nombres réels est archimédien, ce qui permet d y définir la fonction partie entière. En utilisant cette partie entière on verra dans ce
Exercices Corrigés Premières notions sur les espaces vectoriels
 Exercices Corrigés Premières notions sur les espaces vectoriels Exercice 1 On considére le sous-espace vectoriel F de R formé des solutions du système suivant : x1 x 2 x 3 + 2x = 0 E 1 x 1 + 2x 2 + x 3
Exercices Corrigés Premières notions sur les espaces vectoriels Exercice 1 On considére le sous-espace vectoriel F de R formé des solutions du système suivant : x1 x 2 x 3 + 2x = 0 E 1 x 1 + 2x 2 + x 3
Licence de Mathématiques 3
 Faculté des sciences et techniques Département de mathématiques 2004-2005 Licence de Mathématiques 3 M62 : Fonctions réelles de plusieurs variables Laurent Guillopé www.math.sciences.univ-nantes.fr/~guillope/m62/
Faculté des sciences et techniques Département de mathématiques 2004-2005 Licence de Mathématiques 3 M62 : Fonctions réelles de plusieurs variables Laurent Guillopé www.math.sciences.univ-nantes.fr/~guillope/m62/
Cours 02 : Problème général de la programmation linéaire
 Cours 02 : Problème général de la programmation linéaire Cours 02 : Problème général de la Programmation Linéaire. 5 . Introduction Un programme linéaire s'écrit sous la forme suivante. MinZ(ou maxw) =
Cours 02 : Problème général de la programmation linéaire Cours 02 : Problème général de la Programmation Linéaire. 5 . Introduction Un programme linéaire s'écrit sous la forme suivante. MinZ(ou maxw) =
Extrait du poly de Stage de Grésillon 1, août 2010
 MINI-COURS SUR LES POLYNÔMES À UNE VARIABLE Extrait du poly de Stage de Grésillon 1, août 2010 Table des matières I Opérations sur les polynômes 3 II Division euclidienne et racines 5 1 Division euclidienne
MINI-COURS SUR LES POLYNÔMES À UNE VARIABLE Extrait du poly de Stage de Grésillon 1, août 2010 Table des matières I Opérations sur les polynômes 3 II Division euclidienne et racines 5 1 Division euclidienne
Deux disques dans un carré
 Deux disques dans un carré Table des matières 1 Fiche résumé 2 2 Fiche élève Seconde - version 1 3 2.1 Le problème............................................... 3 2.2 Construction de la figure avec geogebra...............................
Deux disques dans un carré Table des matières 1 Fiche résumé 2 2 Fiche élève Seconde - version 1 3 2.1 Le problème............................................... 3 2.2 Construction de la figure avec geogebra...............................
CHAPITRE IV. L axiome du choix
 CHAPITRE IV L axiome du choix Résumé. L axiome du choix AC affirme qu il est légitime de construire des objets mathématiques en répétant un nombre infini de fois l opération de choisir un élément dans
CHAPITRE IV L axiome du choix Résumé. L axiome du choix AC affirme qu il est légitime de construire des objets mathématiques en répétant un nombre infini de fois l opération de choisir un élément dans
La cryptographie du futur
 La cryptographie du futur Abderrahmane Nitaj Laboratoire de Mathématiques Nicolas Oresme Université de Caen, France [email protected] http://www.math.unicaen.fr/~nitaj Résumé Sans nous rendre compte,
La cryptographie du futur Abderrahmane Nitaj Laboratoire de Mathématiques Nicolas Oresme Université de Caen, France [email protected] http://www.math.unicaen.fr/~nitaj Résumé Sans nous rendre compte,
Géométrie dans l espace Produit scalaire et équations
 Chapitre 11. 2ème partie Géométrie dans l espace Produit scalaire et équations Terminale S Ce que dit le programme : CONTENUS CAPACITÉS ATTENDUES COMMENTAIRES 2ème partie Produit scalaire Produit scalaire
Chapitre 11. 2ème partie Géométrie dans l espace Produit scalaire et équations Terminale S Ce que dit le programme : CONTENUS CAPACITÉS ATTENDUES COMMENTAIRES 2ème partie Produit scalaire Produit scalaire
Chapitre VI - Méthodes de factorisation
 Université Pierre et Marie Curie Cours de cryptographie MM067-2012/13 Alain Kraus Chapitre VI - Méthodes de factorisation Le problème de la factorisation des grands entiers est a priori très difficile.
Université Pierre et Marie Curie Cours de cryptographie MM067-2012/13 Alain Kraus Chapitre VI - Méthodes de factorisation Le problème de la factorisation des grands entiers est a priori très difficile.
Physique quantique et physique statistique
 Physique quantique et physique statistique 7 blocs 11 blocs Manuel Joffre Jean-Philippe Bouchaud, Gilles Montambaux et Rémi Monasson nist.gov Crédits : J. Bobroff, F. Bouquet, J. Quilliam www.orolia.com
Physique quantique et physique statistique 7 blocs 11 blocs Manuel Joffre Jean-Philippe Bouchaud, Gilles Montambaux et Rémi Monasson nist.gov Crédits : J. Bobroff, F. Bouquet, J. Quilliam www.orolia.com
Table des matières. I Mise à niveau 11. Préface
 Table des matières Préface v I Mise à niveau 11 1 Bases du calcul commercial 13 1.1 Alphabet grec...................................... 13 1.2 Symboles mathématiques............................... 14 1.3
Table des matières Préface v I Mise à niveau 11 1 Bases du calcul commercial 13 1.1 Alphabet grec...................................... 13 1.2 Symboles mathématiques............................... 14 1.3
UNIVERSITE DES ANTILLES et DE LA GUYANE Campus de Fouillole BP250-97157 Pointe-à-Pitre Cedex CONTRAT 2010-2013 LE MASTER NOM DU DOMAINE STS
 UNIVERSITE DES ANTILLES et DE LA GUYANE Campus de Fouillole BP20-9717 Pointe-à-Pitre Cedex CONTRAT 2010-201 LE MASTER NOM DU DOMAINE STS Mention : Mathématiques Implantation : Guadeloupe FICHES DESCRIPTIVES
UNIVERSITE DES ANTILLES et DE LA GUYANE Campus de Fouillole BP20-9717 Pointe-à-Pitre Cedex CONTRAT 2010-201 LE MASTER NOM DU DOMAINE STS Mention : Mathématiques Implantation : Guadeloupe FICHES DESCRIPTIVES
Premiers exercices d Algèbre. Anne-Marie Simon
 Premiers exercices d Algèbre Anne-Marie Simon première version: 17 août 2005 version corrigée et complétée le 12 octobre 2010 ii Table des matières 1 Quelques structures ensemblistes 1 1.0 Ensembles, relations,
Premiers exercices d Algèbre Anne-Marie Simon première version: 17 août 2005 version corrigée et complétée le 12 octobre 2010 ii Table des matières 1 Quelques structures ensemblistes 1 1.0 Ensembles, relations,
Produit semi-direct. Table des matières. 1 Produit de sous-groupes 2. 2 Produit semi-direct de sous-groupes 3. 3 Produit semi-direct de groupes 4
 Produit semi-direct Table des matières 1 Produit de sous-groupes 2 2 Produit semi-direct de sous-groupes 3 3 Produit semi-direct de groupes 4 1 1 Produit de sous-groupes Soient G un groupe et H et K deux
Produit semi-direct Table des matières 1 Produit de sous-groupes 2 2 Produit semi-direct de sous-groupes 3 3 Produit semi-direct de groupes 4 1 1 Produit de sous-groupes Soient G un groupe et H et K deux