Cinématique et cinétique. 1) Mouvement linéaire 2) Mouvement en rotation
|
|
|
- Amandine Corbeil
- il y a 7 ans
- Total affichages :
Transcription
1 Cinématique et cinétique 1) Mouvement linéaie 2) Mouvement en otation
 Mouvement en")
2 Ouvages : Allad P, Blanchi JP (1996). Analyse du mouvement humain pa la biomécanique. Decaie. Blanchi JP (2000). Biomécanique du mouvement et APS. Vigot. Gimsha P, Buden A (2010). Biomécanique du spot et de l execice. De Boeck.
.")
3

4 1. La cinématique

5 Il y a tois vaiables cinématiques de base : position, vitesse et accéléation la position d un objet est simplement son emplacement dans l espace les vaiation de position peuvent ête décites pa la distance ou le déplacement la vitesse d un objet coespond à la vaiation de position de cet objet en fonction de t l accéléation d un objet coespond à la vaiation de vitesse de cet objet en fonction de t


6 Cinématique : notion de mouvement Teminologie Les notions de mouvement et d immobilité sont elatives! Cinématique du solide : Nécessité de défini un éféentiel On pale du mouvement d un objet S pa appot à un epèe R. Cinématique du point : On pale du mouvement d un point P, appatenant à un objet, S pa appot à un epèe R.

7 Le point O 1 appatenant au buste est en mouvement pa appot au epèe R 0 mais immobile pa appot au epèe R 1 (lié au buste). Mouvement dans le plan sagittal (2D) y 1 O y 1 x 1 y 1 O 1 x 1 O x Temps (% du cycle de mache)
 y 1 O y 1 x 1 y")

8

9

10 Mouvement de la cheville a) Repèe fixe b) Repèe su la hanche

11 Rappel : Coodonnées Catésiennes

12 1
13 S Vecteus e 1 et e 2 fomant une base othonomée. Classiquement : e 1 = i et e 2 = j

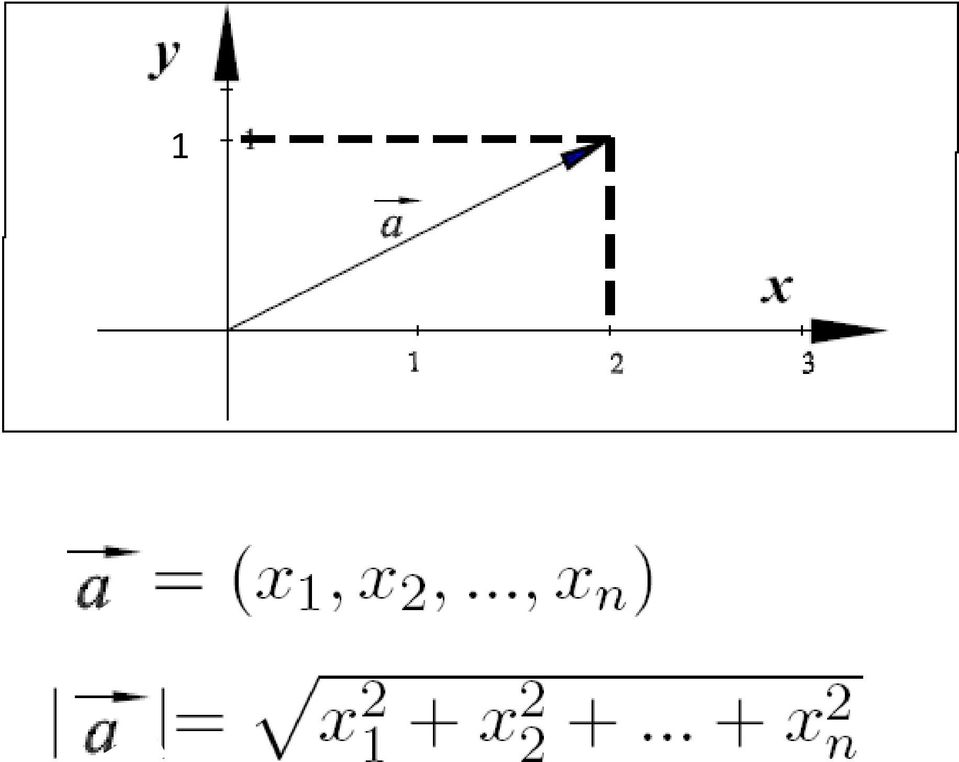
14 position Pou situe le point mobile M dans le epèe R à un instant t quelconque, il est nécessaie de connaîte les coodonnées x(t), y(t) et z(t) de M dans le epèe R. B(y) j Dans le plan O Y i M X A(x) Dans l espace Position : M( x (t), y (t)) M( x (t), y (t), z (t) ) x X z Z i k j o M y m Y Vecteu position : OM OM OA OB OM Om mm x. i y. i OM x. i y. j z. k t t t t t
, z (t) ) x X z Z i k j o M y m Y Vecteu position : OM OM OA OB OM Om mm x. i y. i OM x.")
15 Repéage d un point dans l espace Dans l espace : 3 dimensions (Ox,y,z) epèe othonomé Z M x (t) y (t) x z k i j M m y z (t) Y OM OM OM Om x. i t x mm y. j 2 t y 2 z t. k z 2 X
 Y OM OM OM Om x. i t x mm y.")
16 Vecteus Vecteu : Diection, sens, et longueu

17 Somme vectoielle Opéations su les vecteus : + = A B B A S S A+B mais B A S B A S Difféence vectoielle - B A S - = A B + A - B =

18
19 Cinématique : Position et ses déivées en fonction du temps : vitesse et accéléation v moyen x t x f t x i

20 Vitesse Moyenne vs. Instantanée Vitesse moyenne n est pas tès significative los des événements athlétiques où plusieus changements de diections se poduisent. Exemple du maathon dépat et aivée au même endoit donc v 0??? d 0 Vitesse instantanée (v) plus impotante spécifie à quelle vitesse et dans quelle diection on bouge à un point et à un instant donné

21 speed (m/s) Vitesse (m/s) 14 Vitesse moyenne vs. Instantanée Championnat Monde Tokyo Lewis Buell Mitchell Lewis Avg Buell Avg Mitchell Avg Temps time (s) (s)
22 La vitesse instantanée : La vitesse instantanée epésente le taux de changement instantanée de la position. Contaiement à la vitesse moyenne, la vitesse instantanée pemet de décie le compotement à chaque instant t. vitesse v d t v inst v lim t 0 x t dx dt Le vecteu vitesse instantanée est toujous tangent à la tajectoie. La vitesse instantanée est calculée en penant la limite d un intevalle de temps tendant ves 0.
23 Pente (coefficient diecteu) de la doite tangente au point (t) Y = a X + b V(t) X(t), Y(t) Calcul difféentiel v inst v lim t 0 x t dx dt dt tend ves 0, l intevalle de temps est infiniment petit : «instantané»
24
25
26
27
28 Position Vitesse Accéléation
29 Mouvement unidimensionnel X B (X2) C (X3) 0 t1 t2 t3 t4 Méthode «pas à pas» : V = (X3 X2)/(Δ t) = (X3 X2)/(t3-t2) m/s Δ t = constant t
30 X B (X2) C (X3) 0 t1 t2 t3 t4 M t la vitesse calculée «pas à pas» donne la vitesse pou l instant au milieu de l intevalle Coefficient diecteu (pente) de la tangente
31 Détemination Quantitative de v et a à pati de s ou => Comment calcule v et a à pati de s? image Time Pos. (m) Vel. (m/s) Acc. (m/s/s) 1 0,00 0,00 2 0,10 0,59 5,90-23,00 3 0,20 0,95 3,60-31,00 4 0,30 1,00 0,50-10,00 5 0,40 0,95-0,50-31,00 6 0,50 0,59-3,60 v s t, a v t t = 0,10 s
32 X A (X1) B (X2) C (X3) 0 t1 t2 t3 t4 t Méthode «difféence centale» : V = (X3 X1)/(2*Δ t) = (X3 X1)/(t3-t1) m/s
33 Vitesse linéaie (axe hoizontal) De la hanche, coude, poignet et doigts en handball

34 Touve la distance si nous connaissons la vitesse? Dans l intevalle de temps de a à b, La fomule ΔX = V. Δt donne le déplacement En penant la limite dt tend ves 0, intégale de la vitesse : S V V dt t t t t
35
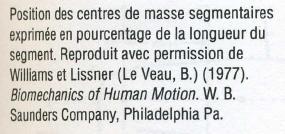
36 Cente de Masse Le cente de masse est le point au niveau duquel la masse copoelle est également distibuée. La ligne de gavité est la ligne qui définie le cente de masse dans le plan tansvese. Debout les bas le long du cops : Seconde vetèbe sacée (S2)
37 Le cente de masse est le point autou duquel la masse copoelle est également distibuée. Point d équilibe distibution symétique CM au milieu Distibution asymétique CM plus poche de la masse la plus impotante
38 x = cm Fomules Généales : n i=1 i=1 m x i m i i n y = cm n i=1 n i=1 où, x i est la distance de l axe x à la i ème masse y i est la distance de l axe y à la i ème masse m i est la masse du i ème élément (segment) m y i m i i
39
40
41

42
43 Mouvement aéien Die à une pesonne de éalise un saut ves le haut à l aide de ses bas le mouvement est influencé seulement pa la gavité losque la pesonne est en l ai le CM suiva une fome paabolique
44 En chemin ves le haut... Initialement la vitesse veticale est élevée quand le cops quitte le sol PUIS la vitesse veticale diminue à cause de la gavité vitesse initiale (positive) v (m/s) La vitesse diminue
45 Sommet du saut... Le cops change de diection donc la vitesse est nulle vitesse initiale (positive) v (m/s) La vitesse diminue vitesse =0
46 En chemin ves le bas... La vitesse du sauteu diminue, elle devient négative mais sa gandeu est plus gande. Vitesse initiale (positive) v (m/s) La vitesse diminue vitesse =0 La vitesse diminue Vitesse finale (négative)
47 Un joueu de basketball peut appaaîte este à une hauteu constante pendant des péiodes bèves de temps en manipulant les segments copoels autou de son CM. Le CM suiva toujous le chemin d une paabole pendant que le cops est en l ai. Cas du mouvement unifomément accéléé.
48
49 Stabilité de l équilibe
50 2. La Cinétique
51 La cinétique s intéesse de echeche les causes / les aisons du mouvement. Pouquoi un objet immobile commence-t-il à se mouvoi? Qu est-ce qui amène un cops à accélée ou alenti? Foce cause capable de poduie ou modifie un mouvement gandeu vectoielle
52 Intoduction Difféentiation ente masse et poids Masse = quantité de matièe la masse est une popiété du cops lui-même [kg] le poids est une foce celle de la gavitation agissant su un cops [N]

53 I - Les foces Définitions On définit une foce comme un agent qui cause ou tend à cause un changement de position ou de fome d'un cops. Les foces sont donc esponsables du mouvement de tous les cops incluant le cops humain et ses segments.
54 Popiétés d'une foce Les foces sont des quantités vectoielles. Elles ont donc les popiétés d'un vecteu soit : - une amplitude - une diection -un point d'application -Un Newton = la magnitude de la foce capable d accélée un objet dont la masse est 1 Kg à 1 M/sec
55
56 Pojection su X Résultante X = F i cos(angle i ) Pojection su Y Résultante Y = F i sin(angle i ) F1 F Fx 2 Fy 2 Y X
57 Foces extenes : Contacts, champs (gavité) Foces intenes : Musculaie
58 La pemièe loi de Newton Tout cops au epos, ou se déplaçant à vitesse constante, tend à demeue au epos, ou à vitesse constante, à moins qu'une foce extene agisse su le cops. Cette ésistance à tout changement de mouvement est aussi appelée l'inetie (idem pou tout cops en mouvement en l absence d une foce) L'inetie d'un cops est diectement popotionnelle à sa masse. Ainsi, un haltèe de 25 kg sea plus difficile à déplace qu'un haltèe de 5 kg à cause de son inetie plus élevée
59 Pincipes qui découlent de la 1 èe loi de Newton Pincipe 1 L'inetie s'applique à tous les cops, qu'ils soient au epos ou en mouvement. Pincipe 2 L'inetie d'un cops est diectement popotionnelle à sa masse. Pincipe 3 Plus la masse d'un cops est gande, plus il est difficile de le mette en mouvement ou plus il est difficile de modifie sa vitesse ou sa diection de mouvement. Pincipe 4 Un cops sea mis en mouvement si la foce appliquée au cops est suffisante pou vaince son inetie ainsi que les autes foces de ésistance agissant su ce cops
60 La 2 ème loi de Newton Un cops soumis à une foce ésultante non nulle subit une accéléation diectement popotionnelle à la foce ésultante qui lui est appliquée et oientée dans le même sens. F = ma
61 Conditions d'équilibe statique En pésence d'un cops au epos, nous pouvons applique les conditions d'équilibe suivantes: - la sommation des foces auxquelles le cops est soumis est nulle et, - la sommation des moments autou de n'impote quel point du cops est nulle. Ces conditions d'équilibe s'expiment pa les tois équations suivantes: F ext = 0 M Fext = 0
62 Pincipes qui découlent diectement de la 2 ème loi de Newton Pincipe 5 L'accéléation d'un objet est diectement popotionnelle à la quantité de foce appliquée, et sa vitesse finale est popotionnelle à la quantité de foce et à la distance d'application de cette foce. Ainsi, si on applique une foce deux fois plus gande su un objet, l'accéléation de cet objet sea également deux fois plus gande. Pincipe 6 La diection de mouvement d'un objet est déteminée pa la diection de la foce appliquée.
63 La 3 ème loi de Newton À toute action coespond une éaction égale et opposée : c'est la loi d'action-éaction
64
65
66
67
68
69 Foces a) Veticale b) Antéo- postéieue c) Médio- latéale
70
71
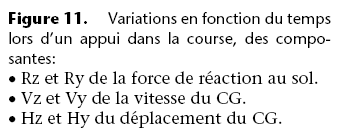
72 3 m/s 4 m/s Foces de éaction au sol Fz Veticale Foces Fy antéo-postéieue 5 m/s 6 m/s
73
74
75 La quantité de mouvement linéaie On appelle quantité de mouvement p le poduit de la masse m d un solide pa sa vitesse: p = m v P = la quantité de mouvement en kg m/s m = la masse du cops en kg v = vitesse du cops en m/s
76 Quantité de mouvement globale au CG M V G
77 L' impulsion et quantité de mouvement L impulsion I donnée à un solide pendant un intevalle de temps (t1, t2) est égale à la vaiation de la quantité de mouvement ente ces deux instants. I 1/ 2 p 2 p 1 mv G2 mv G1 t1 t 2 F ext dt I en N.s ou kgm.s -1 Exece la plus gande foce et/ ou le plus longtemps possible!!
78
79 Consevation de l énegie mécanique EP EC joules (j)
80
81
82
83 Tavail, énegie, puissance, foce Tavail = W = F x d (composante ds sens déplacement) Théoème de l énegie cinétique : E cinétique = K = ½ m x V 2 W = K f K i Puissance = dw/dt = F x V
84
85
11.5 Le moment de force τ (tau) : Production d une accélération angulaire
 : Production d une accélération angulaire") 11.5 Le moment de foce τ (tau) : Poduction d une accéléation angulaie La tige suivante est soumise à deux foces égales et en sens contaie: elle est en équilibe N La tige suivante est soumise à deux foces
11.5 Le moment de foce τ (tau) : Poduction d une accéléation angulaie La tige suivante est soumise à deux foces égales et en sens contaie: elle est en équilibe N La tige suivante est soumise à deux foces
M F. F O Unité: [m. N] La norme du moment de force peut se calculer en introduit le bras de levier d
![M F. F O Unité: [m. N] La norme du moment de force peut se calculer en introduit le bras de levier d](/thumbs/21/1101854.jpg "M F. F O Unité: [m. N] La norme du moment de force peut se calculer en introduit le bras de levier d") Chapite 2: But: connaîte les lois auxquelles doit obéi un cops solide en équilibe. Ceci pemet de décie la station debout ainsi que les conditions nécessaies pou teni une tasse dans la main, souleve une
Chapite 2: But: connaîte les lois auxquelles doit obéi un cops solide en équilibe. Ceci pemet de décie la station debout ainsi que les conditions nécessaies pou teni une tasse dans la main, souleve une
Chapitre 6: Moment cinétique
 Chapite 6: oment cinétique Intoduction http://www.youtube.com/watch?v=vefd0bltgya consevation du moment cinétique 1 - angula momentum consevation 1 - Collège éici_(360p).mp4 http://www.youtube.com/watch?v=w6qaxdppjae
Chapite 6: oment cinétique Intoduction http://www.youtube.com/watch?v=vefd0bltgya consevation du moment cinétique 1 - angula momentum consevation 1 - Collège éici_(360p).mp4 http://www.youtube.com/watch?v=w6qaxdppjae
TRAVAUX DIRIGÉS DE M 6
 D M 6 Coection PCSI 1 013 014 RVUX DIRIGÉS DE M 6 Execice 1 : Pemie vol habité (pa un homme) Le 1 avil 1961, le commandant soviétique Y Gagaine fut le pemie cosmonaute, le vaisseau spatial satellisé était
D M 6 Coection PCSI 1 013 014 RVUX DIRIGÉS DE M 6 Execice 1 : Pemie vol habité (pa un homme) Le 1 avil 1961, le commandant soviétique Y Gagaine fut le pemie cosmonaute, le vaisseau spatial satellisé était
CHAPITRE VI : Le potentiel électrique
 CHPITRE VI : Le potentiel électiue VI. 1 u chapite III, nous avons vu ue losu'une foce est consevative, il est possible de lui associe une énegie potentielle ui conduit à une loi de consevation de l'énegie.
CHPITRE VI : Le potentiel électiue VI. 1 u chapite III, nous avons vu ue losu'une foce est consevative, il est possible de lui associe une énegie potentielle ui conduit à une loi de consevation de l'énegie.
FINANCE Mathématiques Financières
 INSTITUT D ETUDES POLITIQUES 4ème Année, Economie et Entepises 2005/2006 C.M. : M. Godlewski Intéêts Simples Définitions et concepts FINANCE Mathématiques Financièes L intéêt est la émunéation d un pêt.
INSTITUT D ETUDES POLITIQUES 4ème Année, Economie et Entepises 2005/2006 C.M. : M. Godlewski Intéêts Simples Définitions et concepts FINANCE Mathématiques Financièes L intéêt est la émunéation d un pêt.
Mécanique du point : forces Newtoniennes (PCSI)
") écanique du oint : foces Newtoniennes (PCSI Question de cous On admet que, losqu'il est soumis à une foce Newtonienne F K u, la tajectoie d'un cos est lane et décite a mc K +e cosθ où C θ est une constante
écanique du oint : foces Newtoniennes (PCSI Question de cous On admet que, losqu'il est soumis à une foce Newtonienne F K u, la tajectoie d'un cos est lane et décite a mc K +e cosθ où C θ est une constante
DiaDent Group International
 www.diagun.co.k DiaDent Goup Intenational Dispositif de compactage sans fil à chaleu intégée Copyight 2010 DiaDent Goup Intenational www.diadent.com Dispositif de compactage sans fil à chaleu intégée w
www.diagun.co.k DiaDent Goup Intenational Dispositif de compactage sans fil à chaleu intégée Copyight 2010 DiaDent Goup Intenational www.diadent.com Dispositif de compactage sans fil à chaleu intégée w
Chapitre 2 Le problème de l unicité des solutions
 Université Joseph Fourier UE MAT 127 Mathématiques année 2011-2012 Chapitre 2 Le problème de l unicité des solutions Ce que nous verrons dans ce chapitre : un exemple d équation différentielle y = f(y)
Université Joseph Fourier UE MAT 127 Mathématiques année 2011-2012 Chapitre 2 Le problème de l unicité des solutions Ce que nous verrons dans ce chapitre : un exemple d équation différentielle y = f(y)
F411 - Courbes Paramétrées, Polaires
 1/43 Courbes Paramétrées Courbes polaires Longueur d un arc, Courbure F411 - Courbes Paramétrées, Polaires Michel Fournié michel.fournie@iut-tlse3.fr http://www.math.univ-toulouse.fr/ fournie/ Année 2012/2013
1/43 Courbes Paramétrées Courbes polaires Longueur d un arc, Courbure F411 - Courbes Paramétrées, Polaires Michel Fournié michel.fournie@iut-tlse3.fr http://www.math.univ-toulouse.fr/ fournie/ Année 2012/2013
Serveur vidéo IP. caméras analogiques PC serveur. PC Client 1. Serveur de stockage ( optionnel )
") Sony RealShot Manage V3 Info Poduit Mas 2005 RealShot Manage V3.0 Logiciel de gestion des caméas IP MJPEG, MPEG-4, Audio, il sait tout enegiste! Une nouvelle vesion du logiciel RealShot Manage de Sony
Sony RealShot Manage V3 Info Poduit Mas 2005 RealShot Manage V3.0 Logiciel de gestion des caméas IP MJPEG, MPEG-4, Audio, il sait tout enegiste! Une nouvelle vesion du logiciel RealShot Manage de Sony
où «p» représente le nombre de paramètres estimés de la loi de distribution testée sous H 0.
 7- Tests d austement, d indépendance et de coélation - Chapite 7 : Tests d austements, d indépendance et de coélation 7. Test d austement du Khi-deux... 7. Test d austement de Kolmogoov-Sminov... 7.. Test
7- Tests d austement, d indépendance et de coélation - Chapite 7 : Tests d austements, d indépendance et de coélation 7. Test d austement du Khi-deux... 7. Test d austement de Kolmogoov-Sminov... 7.. Test
Chafa Azzedine - Faculté de Physique U.S.T.H.B 1
 Chafa Azzedine - Faculté de Physique U.S.T.H.B 1 Définition: La cinématique est une branche de la mécanique qui étudie les mouements des corps dans l espace en fonction du temps indépendamment des causes
Chafa Azzedine - Faculté de Physique U.S.T.H.B 1 Définition: La cinématique est une branche de la mécanique qui étudie les mouements des corps dans l espace en fonction du temps indépendamment des causes
( Codes : voir verso du feuillet 3 ) SPECIMEN
 SPECIMEN") Aide demandeu d emploi Pojet pesonnalisé d accès à l emploi Pesciption de Pô emploi RFPE AREF CRP - CTP ou d un patenaie de Pô emploi Pécisez : N d AIS Concene de naissance Pénom Né(e) Inscit(e) depuis
Aide demandeu d emploi Pojet pesonnalisé d accès à l emploi Pesciption de Pô emploi RFPE AREF CRP - CTP ou d un patenaie de Pô emploi Pécisez : N d AIS Concene de naissance Pénom Né(e) Inscit(e) depuis
Méthodes de quadrature. Polytech Paris-UPMC. - p. 1/48
 Méthodes de Polytech Paris-UPMC - p. 1/48 Polynôme d interpolation de Preuve et polynôme de Calcul de l erreur d interpolation Étude de la formule d erreur Autres méthodes - p. 2/48 Polynôme d interpolation
Méthodes de Polytech Paris-UPMC - p. 1/48 Polynôme d interpolation de Preuve et polynôme de Calcul de l erreur d interpolation Étude de la formule d erreur Autres méthodes - p. 2/48 Polynôme d interpolation
CARACTERISTIQUES DES SECTIONS PLANES
 CRCTERITIQUE DE ECTION PLNE OENT TTIQUE D UNE ECTION PLNE oient une aie pane et une doite Le moment statiue de a section pa appot à m est défini pa intégae : m ( ) ( ) δ d (doénavant, on note e moment
CRCTERITIQUE DE ECTION PLNE OENT TTIQUE D UNE ECTION PLNE oient une aie pane et une doite Le moment statiue de a section pa appot à m est défini pa intégae : m ( ) ( ) δ d (doénavant, on note e moment
STATIQUE GRAPHIQUE ET STATIQUE ANALYTIQUE
 ÉCOLE D'INGÉNIEURS DE FRIBOURG (E.I.F.) SECTION DE MÉCANIQUE G.R. Nicolet, revu en 2006 STATIQUE GRAPHIQUE ET STATIQUE ANALYTIQUE Eléments de calcul vectoriel Opérations avec les forces Equilibre du point
ÉCOLE D'INGÉNIEURS DE FRIBOURG (E.I.F.) SECTION DE MÉCANIQUE G.R. Nicolet, revu en 2006 STATIQUE GRAPHIQUE ET STATIQUE ANALYTIQUE Eléments de calcul vectoriel Opérations avec les forces Equilibre du point
Cours d Analyse. Fonctions de plusieurs variables
 Cours d Analyse Fonctions de plusieurs variables Licence 1ère année 2007/2008 Nicolas Prioux Université de Marne-la-Vallée Table des matières 1 Notions de géométrie dans l espace et fonctions à deux variables........
Cours d Analyse Fonctions de plusieurs variables Licence 1ère année 2007/2008 Nicolas Prioux Université de Marne-la-Vallée Table des matières 1 Notions de géométrie dans l espace et fonctions à deux variables........
Continuité et dérivabilité d une fonction
 DERNIÈRE IMPRESSIN LE 7 novembre 014 à 10:3 Continuité et dérivabilité d une fonction Table des matières 1 Continuité d une fonction 1.1 Limite finie en un point.......................... 1. Continuité
DERNIÈRE IMPRESSIN LE 7 novembre 014 à 10:3 Continuité et dérivabilité d une fonction Table des matières 1 Continuité d une fonction 1.1 Limite finie en un point.......................... 1. Continuité
3 Approximation de solutions d équations
 3 Approximation de solutions d équations Une équation scalaire a la forme générale f(x) =0où f est une fonction de IR dans IR. Un système de n équations à n inconnues peut aussi se mettre sous une telle
3 Approximation de solutions d équations Une équation scalaire a la forme générale f(x) =0où f est une fonction de IR dans IR. Un système de n équations à n inconnues peut aussi se mettre sous une telle
Po ur d o nne r un é lan à vo tre re traite
 Po u d o nne un é lan à vo te e taite ez a p é P aite t e e vot joud'hui dès au E N EN T TR RE E N NOOUUSS,, CC EESSTT FFAA CC I I LL EE DD EE SS EE O M M PP RR EE NN DDRRE E CC O Toutes les gaanties de
Po u d o nne un é lan à vo te e taite ez a p é P aite t e e vot joud'hui dès au E N EN T TR RE E N NOOUUSS,, CC EESSTT FFAA CC I I LL EE DD EE SS EE O M M PP RR EE NN DDRRE E CC O Toutes les gaanties de
( Mecanique des fluides )
") INSTITUT NTION GRONOMIUE ERTEMENT U GENIE RUR SECTION YRUIUE GRICOE YRUIUE GENERE ( Mecanique des fluides ) TRONC COMMUN ème NNEE atie : Statique des Fluides ( ydostatique ) atie : ynamique des Fluides
INSTITUT NTION GRONOMIUE ERTEMENT U GENIE RUR SECTION YRUIUE GRICOE YRUIUE GENERE ( Mecanique des fluides ) TRONC COMMUN ème NNEE atie : Statique des Fluides ( ydostatique ) atie : ynamique des Fluides
Validation CFD axisymétrique de modèle zonal des écoulements gazeux de chambre de combustion de moteur Diesel
 CONSERVATOIRE NATIONAL DES ARTS ET METIERS Cente d enseignement de Genoble Mémoie Mécanique des stuctues et des systèmes Validation CFD axisymétique de modèle zonal des écoulements gazeux de Auditeu: Jean-Michel
CONSERVATOIRE NATIONAL DES ARTS ET METIERS Cente d enseignement de Genoble Mémoie Mécanique des stuctues et des systèmes Validation CFD axisymétique de modèle zonal des écoulements gazeux de Auditeu: Jean-Michel
PHYSIQUE DES SEMI-CONDUCTEURS
 Dépatement Mico-électonique et télécommunications Pemièe année 004/005 PHYSIQUE DES SEMI-CONDUCTEURS Rouge Violet Infa-Rouge Visible Ulta-Violet Cd x Hg 1-x Te InSb Ge Si GaAs CdSe AlAs CdS GaP SiC GaN
Dépatement Mico-électonique et télécommunications Pemièe année 004/005 PHYSIQUE DES SEMI-CONDUCTEURS Rouge Violet Infa-Rouge Visible Ulta-Violet Cd x Hg 1-x Te InSb Ge Si GaAs CdSe AlAs CdS GaP SiC GaN
Chapitre 1.5a Le champ électrique généré par plusieurs particules
 hapte.5a Le chap électque généé pa pluseus patcules Le chap électque généé pa pluseus chages fxes Le odule de chap électque d une chage ponctuelle est adal, popotonnel à la chage électque et neseent popotonnel
hapte.5a Le chap électque généé pa pluseus patcules Le chap électque généé pa pluseus chages fxes Le odule de chap électque d une chage ponctuelle est adal, popotonnel à la chage électque et neseent popotonnel
CIRCULAIRE N 02/04. Elle précise les méthodes de valorisation des titres de capital et des titres de créances contenus dans les actifs de l OPCVM.
 Rabat, le 02 juillet 2004 CIRCULIRE N 02/04 RELTIVE UX CONDITIONS D ÉVLUTION DES VLEURS PPORTÉES À UN ORGNISME DE PLCEMENT COLLECTIF EN VLEURS MOBILIÈRES OU DÉTENUES PR LUI La pésente ciculaie vient en
Rabat, le 02 juillet 2004 CIRCULIRE N 02/04 RELTIVE UX CONDITIONS D ÉVLUTION DES VLEURS PPORTÉES À UN ORGNISME DE PLCEMENT COLLECTIF EN VLEURS MOBILIÈRES OU DÉTENUES PR LUI La pésente ciculaie vient en
Exercices Alternatifs. Une fonction continue mais dérivable nulle part
 Eercices Alternatifs Une fonction continue mais dérivable nulle part c 22 Frédéric Le Rou (copyleft LDL : Licence pour Documents Libres). Sources et figures: applications-continues-non-derivables/. Version
Eercices Alternatifs Une fonction continue mais dérivable nulle part c 22 Frédéric Le Rou (copyleft LDL : Licence pour Documents Libres). Sources et figures: applications-continues-non-derivables/. Version
Permis de feu. Travail par point chaud. r Soudage r Brasage. r Découpage r Tronçonnage. r Meulage r Autres. r Poste à souder r Tronçonneuse
 Pemis de feu Tavail pa point chaud Patage vote engagement Ce document doit ête établi avant tout tavail pa point chaud (soudage, découpage, meulage, ) afin de péveni les isques d incendie et d explosion
Pemis de feu Tavail pa point chaud Patage vote engagement Ce document doit ête établi avant tout tavail pa point chaud (soudage, découpage, meulage, ) afin de péveni les isques d incendie et d explosion
Module d Electricité. 2 ème partie : Electrostatique. Fabrice Sincère (version 3.0.1) http://pagesperso-orange.fr/fabrice.sincere
 http://pagesperso-orange.fr/fabrice.sincere") Module d Electricité 2 ème partie : Electrostatique Fabrice Sincère (version 3.0.1) http://pagesperso-orange.fr/fabrice.sincere 1 Introduction Principaux constituants de la matière : - protons : charge
Module d Electricité 2 ème partie : Electrostatique Fabrice Sincère (version 3.0.1) http://pagesperso-orange.fr/fabrice.sincere 1 Introduction Principaux constituants de la matière : - protons : charge
Commun à tous les candidats
 EXERCICE 3 (9 points ) Commun à tous les candidats On s intéresse à des courbes servant de modèle à la distribution de la masse salariale d une entreprise. Les fonctions f associées définies sur l intervalle
EXERCICE 3 (9 points ) Commun à tous les candidats On s intéresse à des courbes servant de modèle à la distribution de la masse salariale d une entreprise. Les fonctions f associées définies sur l intervalle
CLOUD CX263 MÉLANGEUR
 COUD CX6 MÉANGEU Clealy bette soun ZONE ZONE MUSIC SOUCE MUSIC SOUCE MUSIC SOUCE MUSIC EVE MUSIC EVE MUSIC EVE MIC EVE MIC EVE MIC EVE MIC EVE MIC EVE MIC EVE 6 6 6 5 5 5 MICOPHONE CX6 4 4 4 F HF F HF
COUD CX6 MÉANGEU Clealy bette soun ZONE ZONE MUSIC SOUCE MUSIC SOUCE MUSIC SOUCE MUSIC EVE MUSIC EVE MUSIC EVE MIC EVE MIC EVE MIC EVE MIC EVE MIC EVE MIC EVE 6 6 6 5 5 5 MICOPHONE CX6 4 4 4 F HF F HF
Chapitre 2 Le problème de l unicité des solutions
 Université Joseph Fourier UE MAT 127 Mthémtiques nnée 2009-2010 Chpitre 2 Le prolème de l unicité des solutions 1 Le prolème et quelques réponses : 1.1 Un exemple Montrer que l éqution différentielle :
Université Joseph Fourier UE MAT 127 Mthémtiques nnée 2009-2010 Chpitre 2 Le prolème de l unicité des solutions 1 Le prolème et quelques réponses : 1.1 Un exemple Montrer que l éqution différentielle :
Chapitre 7 : Intégration sur un intervalle quelconque
 Universités Paris 6 et Paris 7 M1 MEEF Analyse (UE 3) 2013-2014 Chapitre 7 : Intégration sur un intervalle quelconque 1 Fonctions intégrables Définition 1 Soit I R un intervalle et soit f : I R + une fonction
Universités Paris 6 et Paris 7 M1 MEEF Analyse (UE 3) 2013-2014 Chapitre 7 : Intégration sur un intervalle quelconque 1 Fonctions intégrables Définition 1 Soit I R un intervalle et soit f : I R + une fonction
Chapitre 0 Introduction à la cinématique
 Chapitre 0 Introduction à la cinématique Plan Vitesse, accélération Coordonnées polaires Exercices corrigés Vitesse, Accélération La cinématique est l étude du mouvement Elle suppose donc l existence à
Chapitre 0 Introduction à la cinématique Plan Vitesse, accélération Coordonnées polaires Exercices corrigés Vitesse, Accélération La cinématique est l étude du mouvement Elle suppose donc l existence à
Michel Henry Nicolas Delorme
 Michel Henry Nicolas Delorme Mécanique du point Cours + Exos Michel Henry Maître de conférences à l IUFM des Pays de Loire (Le Mans) Agrégé de physique Nicolas Delorme Maître de conférences à l université
Michel Henry Nicolas Delorme Mécanique du point Cours + Exos Michel Henry Maître de conférences à l IUFM des Pays de Loire (Le Mans) Agrégé de physique Nicolas Delorme Maître de conférences à l université
SOMMAIRE. ATRACOM-Centrafrique Manuel de Procédures Administratives Financiers et Comptables
 ATRACOM-Centafique Manuel de Pocédues Administatives Financies et Comptables G MODULE G GESTION DE LA TRESORERIE SOMMAIRE G MODULE G GESTION DE LA TRESORERIE... 1 G.1 COMPOSANTES DE LA TRESORERIE... 2
ATRACOM-Centafique Manuel de Pocédues Administatives Financies et Comptables G MODULE G GESTION DE LA TRESORERIE SOMMAIRE G MODULE G GESTION DE LA TRESORERIE... 1 G.1 COMPOSANTES DE LA TRESORERIE... 2
8.1 Généralités sur les fonctions de plusieurs variables réelles. f : R 2 R (x, y) 1 x 2 y 2
 1 x 2 y 2") Chapitre 8 Fonctions de plusieurs variables 8.1 Généralités sur les fonctions de plusieurs variables réelles Définition. Une fonction réelle de n variables réelles est une application d une partie de R
Chapitre 8 Fonctions de plusieurs variables 8.1 Généralités sur les fonctions de plusieurs variables réelles Définition. Une fonction réelle de n variables réelles est une application d une partie de R
Repérage d un point - Vitesse et
 PSI - écanique I - Repérage d un point - Vitesse et accélération page 1/6 Repérage d un point - Vitesse et accélération Table des matières 1 Espace et temps - Référentiel d observation 1 2 Coordonnées
PSI - écanique I - Repérage d un point - Vitesse et accélération page 1/6 Repérage d un point - Vitesse et accélération Table des matières 1 Espace et temps - Référentiel d observation 1 2 Coordonnées
Notes du cours MTH1101 Calcul I Partie II: fonctions de plusieurs variables
 Notes du cours MTH1101 Calcul I Partie II: fonctions de plusieurs variables Guy Desaulniers Département de mathématiques et de génie industriel École Polytechnique de Montréal Automne 2014 Table des matières
Notes du cours MTH1101 Calcul I Partie II: fonctions de plusieurs variables Guy Desaulniers Département de mathématiques et de génie industriel École Polytechnique de Montréal Automne 2014 Table des matières
CHAPITRE V SYSTEMES DIFFERENTIELS LINEAIRES A COEFFICIENTS CONSTANTS DU PREMIER ORDRE. EQUATIONS DIFFERENTIELLES.
 CHAPITRE V SYSTEMES DIFFERENTIELS LINEAIRES A COEFFICIENTS CONSTANTS DU PREMIER ORDRE EQUATIONS DIFFERENTIELLES Le but de ce chapitre est la résolution des deux types de systèmes différentiels linéaires
CHAPITRE V SYSTEMES DIFFERENTIELS LINEAIRES A COEFFICIENTS CONSTANTS DU PREMIER ORDRE EQUATIONS DIFFERENTIELLES Le but de ce chapitre est la résolution des deux types de systèmes différentiels linéaires
Magister en : Electrotechnique
 انج س ت انجضائش ت انذ مشاط ت انشعب ت République Algéienne Démocatique et Populaie صاسة انتعه ى انعان انبحث انعه Minitèe de l Eneignement Supéieu et de la Recheche Scientifique Univeité Mohamed Khide Bika
انج س ت انجضائش ت انذ مشاط ت انشعب ت République Algéienne Démocatique et Populaie صاسة انتعه ى انعان انبحث انعه Minitèe de l Eneignement Supéieu et de la Recheche Scientifique Univeité Mohamed Khide Bika
Notes du cours MTH1101N Calcul I Partie II: fonctions de plusieurs variables
 Notes du cours MTH1101N Calcul I Partie II: fonctions de plusieurs variables Fausto Errico Département de mathématiques et de génie industriel École Polytechnique de Montréal Automne 2012 Table des matières
Notes du cours MTH1101N Calcul I Partie II: fonctions de plusieurs variables Fausto Errico Département de mathématiques et de génie industriel École Polytechnique de Montréal Automne 2012 Table des matières
Exprimer ce coefficient de proportionnalité sous forme de pourcentage : 3,5 %
 23 CALCUL DE L INTÉRÊT Tau d intérêt Paul et Rémi ont reçu pour Noël, respectivement, 20 et 80. Ils placent cet argent dans une banque, au même tau. Au bout d une année, ce placement leur rapportera une
23 CALCUL DE L INTÉRÊT Tau d intérêt Paul et Rémi ont reçu pour Noël, respectivement, 20 et 80. Ils placent cet argent dans une banque, au même tau. Au bout d une année, ce placement leur rapportera une
Q6 : Comment calcule t-on l intensité sonore à partir du niveau d intensité?
 EXERCICE 1 : QUESTION DE COURS Q1 : Qu est ce qu une onde progressive? Q2 : Qu est ce qu une onde mécanique? Q3 : Qu elle est la condition pour qu une onde soit diffractée? Q4 : Quelles sont les différentes
EXERCICE 1 : QUESTION DE COURS Q1 : Qu est ce qu une onde progressive? Q2 : Qu est ce qu une onde mécanique? Q3 : Qu elle est la condition pour qu une onde soit diffractée? Q4 : Quelles sont les différentes
Chapitre 5. Le ressort. F ext. F ressort
 Chapitre 5 Le ressort Le ressort est un élément fondamental de plusieurs mécanismes. Il existe plusieurs types de ressorts (à boudin, à lame, spiral etc.) Que l on comprime ou étire un ressort, tel que
Chapitre 5 Le ressort Le ressort est un élément fondamental de plusieurs mécanismes. Il existe plusieurs types de ressorts (à boudin, à lame, spiral etc.) Que l on comprime ou étire un ressort, tel que
CONSTANTES DIELECTRIQUES
 9 E7 CONTANTE DIELECTRIQUE I. INTRODUCTION Dans cette expéience, nous étuieons es conensateus et nous éiveons les popiétés e iélectiques tels que l'ai et le plexiglas. II. THEORIE A) Conensateus et iélectiques
9 E7 CONTANTE DIELECTRIQUE I. INTRODUCTION Dans cette expéience, nous étuieons es conensateus et nous éiveons les popiétés e iélectiques tels que l'ai et le plexiglas. II. THEORIE A) Conensateus et iélectiques
POLY-PREPAS Centre de Préparation aux Concours Paramédicaux. - Section Audioprothésiste / stage i-prépa intensif -
 POLY-PREPAS Centre de Préparation aux Concours Paramédicaux - Section Audioprothésiste / stage i-prépa intensif - 70 Chapitre 8 : Champ de gravitation - Satellites I. Loi de gravitation universelle : (
POLY-PREPAS Centre de Préparation aux Concours Paramédicaux - Section Audioprothésiste / stage i-prépa intensif - 70 Chapitre 8 : Champ de gravitation - Satellites I. Loi de gravitation universelle : (
Évaluation de l'incertitude de mesure par une méthode statistique ("méthode de type A") Voir cours d'instrumentation
 Voir cours d'instrumentation") G. Pinson - Physique ppliquée Mesues - 16 / 1 16 - Instuments de mesues Eeu et incetitude su la mesue d'une gandeu Ce qui suit découle des pesciptions du IPM (ueau Intenational des Poids et Mesues, Fance),
G. Pinson - Physique ppliquée Mesues - 16 / 1 16 - Instuments de mesues Eeu et incetitude su la mesue d'une gandeu Ce qui suit découle des pesciptions du IPM (ueau Intenational des Poids et Mesues, Fance),
DEUXIEME ANNEE TRONC COMMUN TECHNOLOGIE TRAVAUX DIRIGES DE PHYSIQUE VIBRATIONS ONDES
 UNIVERSITE DES SCIENCES ET DE A TECHNOOGIE HOUARI BOUMEDIENNE INSTITUT DE PHYSIQUE DEPARTEMENT DES ENSEIGNEMENTS DE PHYSIQUE DE BASE DEUXIEME ANNEE TRONC COMMUN TECHNOOGIE TRAVAUX DIRIGES DE PHYSIQUE VIBRATIONS
UNIVERSITE DES SCIENCES ET DE A TECHNOOGIE HOUARI BOUMEDIENNE INSTITUT DE PHYSIQUE DEPARTEMENT DES ENSEIGNEMENTS DE PHYSIQUE DE BASE DEUXIEME ANNEE TRONC COMMUN TECHNOOGIE TRAVAUX DIRIGES DE PHYSIQUE VIBRATIONS
Chapitre 1 Régime transitoire dans les systèmes physiques
 Chapitre 1 Régime transitoire dans les systèmes physiques Savoir-faire théoriques (T) : Écrire l équation différentielle associée à un système physique ; Faire apparaître la constante de temps ; Tracer
Chapitre 1 Régime transitoire dans les systèmes physiques Savoir-faire théoriques (T) : Écrire l équation différentielle associée à un système physique ; Faire apparaître la constante de temps ; Tracer
Fonctions de plusieurs variables
 Maths MP Exercices Fonctions de plusieurs variables Les indications ne sont ici que pour être consultées après le T (pour les exercices non traités). Avant et pendant le T, tenez bon et n allez pas les
Maths MP Exercices Fonctions de plusieurs variables Les indications ne sont ici que pour être consultées après le T (pour les exercices non traités). Avant et pendant le T, tenez bon et n allez pas les
SDLS08 - Modes propres d'une plaque carrée calculés sur base réduite
 Titre : SDLS08 - Modes propres d'une plaque carrée calculé[...] Date : 03/08/2011 Page : 1/6 SDLS08 - Modes propres d'une plaque carrée calculés sur base réduite Résumé : Ce cas test a pour objectif de
Titre : SDLS08 - Modes propres d'une plaque carrée calculé[...] Date : 03/08/2011 Page : 1/6 SDLS08 - Modes propres d'une plaque carrée calculés sur base réduite Résumé : Ce cas test a pour objectif de
Mouvement d'une particule chargée dans un champ magnétique indépendant du temps
 Moueent d'une patiule hagée dans un hap agnétique indépendant du teps iblio: Pee elat Gaing Magnétise Into expéientale: Dispositif: On obsee une déiation du faseau d'életons losqu'il aie ae une itesse
Moueent d'une patiule hagée dans un hap agnétique indépendant du teps iblio: Pee elat Gaing Magnétise Into expéientale: Dispositif: On obsee une déiation du faseau d'életons losqu'il aie ae une itesse
MAISON DE L ARSLA 75 AVENUE DE LA REPUBLIQUE 75011 PARIS 28/03/2014
 MAISON DE L ARSLA 75 AVENUE DE LA REPUBLIQUE 7511 PARIS 28/3/214 D BUDGET PREVISIONNEL 214 Le budget pévisionnel 214, d un ontant de 1 8 en dépenses et en ecettes, epend, hos éléents exceptionnels, les
MAISON DE L ARSLA 75 AVENUE DE LA REPUBLIQUE 7511 PARIS 28/3/214 D BUDGET PREVISIONNEL 214 Le budget pévisionnel 214, d un ontant de 1 8 en dépenses et en ecettes, epend, hos éléents exceptionnels, les
Nombre dérivé et tangente
 Nombre dérivé et tangente I) Interprétation graphique 1) Taux de variation d une fonction en un point. Soit une fonction définie sur un intervalle I contenant le nombre réel a, soit (C) sa courbe représentative
Nombre dérivé et tangente I) Interprétation graphique 1) Taux de variation d une fonction en un point. Soit une fonction définie sur un intervalle I contenant le nombre réel a, soit (C) sa courbe représentative
Introduction à l analyse numérique : exemple du cloud computing
 Introduction à l analyse numérique : exemple du cloud computing Tony FEVRIER Aujourd hui! Table des matières 1 Equations aux dérivées partielles et modélisation Equation différentielle et modélisation
Introduction à l analyse numérique : exemple du cloud computing Tony FEVRIER Aujourd hui! Table des matières 1 Equations aux dérivées partielles et modélisation Equation différentielle et modélisation
Annexe A. Annexe A. Tableaux et données relatifs à la vérification par Eurocode 3 A.3
 Annexes Annexe A : Tableaux et données relatifs à la vérification par Eurocode 3... A.2 Annexe B : Format des fichiers générés et utilisés par CADBEL... A.11 Annexe C : Calcul de la résistance au flambement
Annexes Annexe A : Tableaux et données relatifs à la vérification par Eurocode 3... A.2 Annexe B : Format des fichiers générés et utilisés par CADBEL... A.11 Annexe C : Calcul de la résistance au flambement
Quelques éléments d écologie utiles au forestier
 BTSA Gestion Foestièe Module D41 V.1.1. Avil 1997 Quelques éléments d écologie utiles au foestie Paysage vosgien : un exemple d écocomplexe divesifié. Sylvain Gaudin CFPPA/CFAA de Châteaufaine E 10 ue
BTSA Gestion Foestièe Module D41 V.1.1. Avil 1997 Quelques éléments d écologie utiles au foestie Paysage vosgien : un exemple d écocomplexe divesifié. Sylvain Gaudin CFPPA/CFAA de Châteaufaine E 10 ue
Ergonomie au bureau. Votre santé avant tout
 Ergonomie au bureau Votre santé avant tout L individu est unique, sa morphologie aussi. L aménagement ergonomique de la place de travail doit tenir compte des spécificités de chacun. Il permet d éviter
Ergonomie au bureau Votre santé avant tout L individu est unique, sa morphologie aussi. L aménagement ergonomique de la place de travail doit tenir compte des spécificités de chacun. Il permet d éviter
DM n o 8 TS1 2012 Physique 10 (satellites) + Chimie 12 (catalyse) Exercice 1 Lancement d un satellite météorologique
 + Chimie 12 (catalyse) Exercice 1 Lancement d un satellite météorologique") DM n o 8 TS1 2012 Physique 10 (satellites) + Chimie 12 (catalyse) Exercice 1 Lancement d un satellite météorologique Le centre spatial de Kourou a lancé le 21 décembre 200, avec une fusée Ariane, un satellite
DM n o 8 TS1 2012 Physique 10 (satellites) + Chimie 12 (catalyse) Exercice 1 Lancement d un satellite météorologique Le centre spatial de Kourou a lancé le 21 décembre 200, avec une fusée Ariane, un satellite
Créer un observatoire de la concurrence. Créer un observatoire de la concurrence. Démarche. ntérêt. C aractéristiques.
 Cée un obsevatoie de la concuence poblématique I Quelle est l'étendue d'un maché? Quelle pat du maché, une entepise peut-elle espée pende? Quels sont les atouts des entepises pésentes su le maché? ntéêt
Cée un obsevatoie de la concuence poblématique I Quelle est l'étendue d'un maché? Quelle pat du maché, une entepise peut-elle espée pende? Quels sont les atouts des entepises pésentes su le maché? ntéêt
Initiation à la Mécanique des Fluides. Mr. Zoubir HAMIDI
 Initiation à la Mécanique des Fluides Mr. Zoubir HAMIDI Chapitre I : Introduction à la mécanique des fluides 1 Introduction La mécanique des fluides(mdf) a pour objet l étude du comportement des fluides
Initiation à la Mécanique des Fluides Mr. Zoubir HAMIDI Chapitre I : Introduction à la mécanique des fluides 1 Introduction La mécanique des fluides(mdf) a pour objet l étude du comportement des fluides
Amélioration des performances des aérogénérateurs
 N d ode : Séie : الجمهورية الجزاي رية الديمقراطية الشعبية REPUBIQUE AGERIENNE DEMOCRATIQUE ET POPUAIRE MINISTERE DE ENSEIGNEMENT SUPERIEUR ET DE A RECHERCHE SCIENTIFIQUE UNIERSITE CONSTANTINE I Faculté
N d ode : Séie : الجمهورية الجزاي رية الديمقراطية الشعبية REPUBIQUE AGERIENNE DEMOCRATIQUE ET POPUAIRE MINISTERE DE ENSEIGNEMENT SUPERIEUR ET DE A RECHERCHE SCIENTIFIQUE UNIERSITE CONSTANTINE I Faculté
Résolution d équations non linéaires
 Analyse Numérique Résolution d équations non linéaires Said EL HAJJI et Touria GHEMIRES Université Mohammed V - Agdal. Faculté des Sciences Département de Mathématiques. Laboratoire de Mathématiques, Informatique
Analyse Numérique Résolution d équations non linéaires Said EL HAJJI et Touria GHEMIRES Université Mohammed V - Agdal. Faculté des Sciences Département de Mathématiques. Laboratoire de Mathématiques, Informatique
* très facile ** facile *** difficulté moyenne **** difficile ***** très difficile I : Incontournable T : pour travailler et mémoriser le cours
 Exo7 Continuité (étude globale). Diverses fonctions Exercices de Jean-Louis Rouget. Retrouver aussi cette fiche sur www.maths-france.fr * très facile ** facile *** difficulté moyenne **** difficile *****
Exo7 Continuité (étude globale). Diverses fonctions Exercices de Jean-Louis Rouget. Retrouver aussi cette fiche sur www.maths-france.fr * très facile ** facile *** difficulté moyenne **** difficile *****
1 Définition. 2 Systèmes matériels et solides. 3 Les actions mécaniques. Le système matériel : Il peut être un ensemble.un sous-ensemble..
 1 Définition GÉNÉRALITÉS Statique 1 2 Systèmes matériels et solides Le système matériel : Il peut être un ensemble.un sous-ensemble..une pièce mais aussi un liquide ou un gaz Le solide : Il est supposé
1 Définition GÉNÉRALITÉS Statique 1 2 Systèmes matériels et solides Le système matériel : Il peut être un ensemble.un sous-ensemble..une pièce mais aussi un liquide ou un gaz Le solide : Il est supposé
Informations Techniques A7 A141. Roulements à Billes à Gorge Profonde. Roulements à Billes à Contact Oblique. Roulements à Billes Auto-Aligneurs
 ROULEMENTS Pages Infomations Techniques A7 A141 Infos Tech. Roulements à Billes à Goge Pofonde B4 B45 Roulements à Billes à Contact Oblique Roulements à Billes Auto-Aligneus Roulements à Rouleaux Cylindiques
ROULEMENTS Pages Infomations Techniques A7 A141 Infos Tech. Roulements à Billes à Goge Pofonde B4 B45 Roulements à Billes à Contact Oblique Roulements à Billes Auto-Aligneus Roulements à Rouleaux Cylindiques
GESTION DES RELATIONS HUMAINES ET COMPÉTENCES
 GESTION DES RELATIONS HUMAINES ET COMPÉTENCES DEMANDE D INFORMATION Vous souhaitez ecevoi de l infomation elative aux solutions de la thématique Gestion des elations humaines et des compétences? Photocopiez
GESTION DES RELATIONS HUMAINES ET COMPÉTENCES DEMANDE D INFORMATION Vous souhaitez ecevoi de l infomation elative aux solutions de la thématique Gestion des elations humaines et des compétences? Photocopiez
Chapitre 2 : Caractéristiques du mouvement d un solide
 Chapitre 2 : Caractéristiques du mouvement d un solide I Rappels : Référentiel : Le mouvement d un corps est décris par rapport à un corps de référence et dépend du choix de ce corps. Ce corps de référence
Chapitre 2 : Caractéristiques du mouvement d un solide I Rappels : Référentiel : Le mouvement d un corps est décris par rapport à un corps de référence et dépend du choix de ce corps. Ce corps de référence
1.1.1 Signaux à variation temporelle continue-discrète
 Chapitre Base des Signaux. Classi cation des signaux.. Signaux à variation temporelle continue-discrète Les signaux à variation temporelle continue sont des fonctions d une ou plusieurs variables continues
Chapitre Base des Signaux. Classi cation des signaux.. Signaux à variation temporelle continue-discrète Les signaux à variation temporelle continue sont des fonctions d une ou plusieurs variables continues
Calcul intégral élémentaire en plusieurs variables
 Calcul intégral élémentaire en plusieurs variables PC*2 2 septembre 2009 Avant-propos À part le théorème de Fubini qui sera démontré dans le cours sur les intégrales à paramètres et qui ne semble pas explicitement
Calcul intégral élémentaire en plusieurs variables PC*2 2 septembre 2009 Avant-propos À part le théorème de Fubini qui sera démontré dans le cours sur les intégrales à paramètres et qui ne semble pas explicitement
I - PUISSANCE D UN POINT PAR RAPPORT A UN CERCLE CERCLES ORTHOGONAUX POLES ET POLAIRES
 I - PUISSANCE D UN POINT PAR RAPPORT A UN CERCLE CERCLES ORTHOGONAUX POLES ET POLAIRES Théorème - Définition Soit un cercle (O,R) et un point. Une droite passant par coupe le cercle en deux points A et
I - PUISSANCE D UN POINT PAR RAPPORT A UN CERCLE CERCLES ORTHOGONAUX POLES ET POLAIRES Théorème - Définition Soit un cercle (O,R) et un point. Une droite passant par coupe le cercle en deux points A et
Etude de fonctions: procédure et exemple
 Etude de fonctions: procédure et exemple Yves Delhaye 8 juillet 2007 Résumé Dans ce court travail, nous présentons les différentes étapes d une étude de fonction à travers un exemple. Nous nous limitons
Etude de fonctions: procédure et exemple Yves Delhaye 8 juillet 2007 Résumé Dans ce court travail, nous présentons les différentes étapes d une étude de fonction à travers un exemple. Nous nous limitons
Généralités. Aperçu. Introduction. Précision. Instruction de montage. Lubrification. Conception. Produits. Guides à brides FNS. Guides standards GNS
 Généralités Aperçu Introduction Précision Instruction de montage Lubrification Conception page............................. 4............................. 5............................. 6.............................
Généralités Aperçu Introduction Précision Instruction de montage Lubrification Conception page............................. 4............................. 5............................. 6.............................
Enoncé et corrigé du brevet des collèges dans les académies d Aix- Marseille, Montpellier, Nice Corse et Toulouse en 2000. Énoncé.
 Enoncé et corrigé du brevet des collèges dans les académies d Aix- Marseille, Montpellier, Nice Corse et Toulouse en 2000. Énoncé. I- ACTIVITES NUMERIQUES (12 points) Exercice 1 (3 points) On considère
Enoncé et corrigé du brevet des collèges dans les académies d Aix- Marseille, Montpellier, Nice Corse et Toulouse en 2000. Énoncé. I- ACTIVITES NUMERIQUES (12 points) Exercice 1 (3 points) On considère
Cours et Exercices de Mécanique :
 Cours et Eercices de Mécanique : Mécanique du Point Ingénieur CESI Préparation au tests de sélection Version 40-1 - Programme de physique B Mécanique Chapitre 5 : Statique - Forces, moments de forces,
Cours et Eercices de Mécanique : Mécanique du Point Ingénieur CESI Préparation au tests de sélection Version 40-1 - Programme de physique B Mécanique Chapitre 5 : Statique - Forces, moments de forces,
Exercices Alternatifs. Une fonction continue mais dérivable nulle part
 Eercices Alternatifs Une fonction continue mais dérivable nulle part c 22 Frédéric Le Rou (copleft LDL : Licence pour Documents Libres). Sources et figures: applications-continues-non-derivables/. Version
Eercices Alternatifs Une fonction continue mais dérivable nulle part c 22 Frédéric Le Rou (copleft LDL : Licence pour Documents Libres). Sources et figures: applications-continues-non-derivables/. Version
La fonction exponentielle
 DERNIÈRE IMPRESSION LE 2 novembre 204 à :07 La fonction exponentielle Table des matières La fonction exponentielle 2. Définition et théorèmes.......................... 2.2 Approche graphique de la fonction
DERNIÈRE IMPRESSION LE 2 novembre 204 à :07 La fonction exponentielle Table des matières La fonction exponentielle 2. Définition et théorèmes.......................... 2.2 Approche graphique de la fonction
Annexe II. Les trois lois de Kepler
 Annexe II es tois lois de Keple écnique & 4 èe - Annexe II es tois lois de Keple Johnnes Keple (57-6), pulie en 596 son peie ouge, ysteiu Cosogphicu Teize nnées plus td, en 69, il pulie Astonoi No, dns
Annexe II es tois lois de Keple écnique & 4 èe - Annexe II es tois lois de Keple Johnnes Keple (57-6), pulie en 596 son peie ouge, ysteiu Cosogphicu Teize nnées plus td, en 69, il pulie Astonoi No, dns
Guide de l acheteur de logiciel de Paie
 Note pespicacité Pivilégie les essouces humaines Guide de l acheteu de logiciel de Paie Table des matièes Intoduction Tendances écentes de Paie L automation de Paie avec libe-sevice pou employés Analyse
Note pespicacité Pivilégie les essouces humaines Guide de l acheteu de logiciel de Paie Table des matièes Intoduction Tendances écentes de Paie L automation de Paie avec libe-sevice pou employés Analyse
Suva Sécurité durant les loisirs Case postale, 6002 Lucerne. Renseignements Tél. 041 419 51 11
 «Top 10» de l hiver Suva Sécurité durant les loisirs Case postale, 6002 Lucerne Renseignements Tél. 041 419 51 11 Commandes www.suva.ch/waswo-f Fax 041 419 59 17 Tél. 041 419 58 51 Auteurs Dr Hans Spring,
«Top 10» de l hiver Suva Sécurité durant les loisirs Case postale, 6002 Lucerne Renseignements Tél. 041 419 51 11 Commandes www.suva.ch/waswo-f Fax 041 419 59 17 Tél. 041 419 58 51 Auteurs Dr Hans Spring,
TSTI 2D CH X : Exemples de lois à densité 1
 TSTI 2D CH X : Exemples de lois à densité I Loi uniforme sur ab ; ) Introduction Dans cette activité, on s intéresse à la modélisation du tirage au hasard d un nombre réel de l intervalle [0 ;], chacun
TSTI 2D CH X : Exemples de lois à densité I Loi uniforme sur ab ; ) Introduction Dans cette activité, on s intéresse à la modélisation du tirage au hasard d un nombre réel de l intervalle [0 ;], chacun
SYSTÈME D ALARME ET PRODUITS TRANSMETTEURS
 SYSTÈME D ALARME ET PRODUITS TRANSMETTEURS NOTICE D UTILISATION Vous venez d acquéi un système de sécuité DAITEM adapté à vos besoins de potection et nous vous en emecions. Quelques pécautions L'installation
SYSTÈME D ALARME ET PRODUITS TRANSMETTEURS NOTICE D UTILISATION Vous venez d acquéi un système de sécuité DAITEM adapté à vos besoins de potection et nous vous en emecions. Quelques pécautions L'installation
TD de Physique n o 1 : Mécanique du point
 E.N.S. de Cachan Département E.E.A. M FE 3 e année Phsique appliquée 011-01 TD de Phsique n o 1 : Mécanique du point Exercice n o 1 : Trajectoire d un ballon-sonde Un ballon-sonde M, lâché au niveau du
E.N.S. de Cachan Département E.E.A. M FE 3 e année Phsique appliquée 011-01 TD de Phsique n o 1 : Mécanique du point Exercice n o 1 : Trajectoire d un ballon-sonde Un ballon-sonde M, lâché au niveau du
Roulements à billes et à rouleaux
 Fo New Technology Netwok R copoation Roulements à billes et à ouleaux CAT. NO. 222-VIII/F Manuel technique A- Roulements à billes à goges pofondes B- Roulements miniatues B- 1 Roulements à billes à contact
Fo New Technology Netwok R copoation Roulements à billes et à ouleaux CAT. NO. 222-VIII/F Manuel technique A- Roulements à billes à goges pofondes B- Roulements miniatues B- 1 Roulements à billes à contact
Roulements à rotule sur deux rangées de rouleaux en deux parties
 Roulements à otule su deux angées de ouleaux en deux paties Réduction des coûts gâce au changement apide du oulement difficilement accessible Contenu Changement apide du oulement 2 Réduction des coûts
Roulements à otule su deux angées de ouleaux en deux paties Réduction des coûts gâce au changement apide du oulement difficilement accessible Contenu Changement apide du oulement 2 Réduction des coûts
Chap 8 - TEMPS & RELATIVITE RESTREINTE
 Chap 8 - TEMPS & RELATIVITE RESTREINTE Exercice 0 page 9 On considère deux évènements E et E Référentiel propre, R : la Terre. Dans ce référentiel, les deux évènements ont lieu au même endroit. La durée
Chap 8 - TEMPS & RELATIVITE RESTREINTE Exercice 0 page 9 On considère deux évènements E et E Référentiel propre, R : la Terre. Dans ce référentiel, les deux évènements ont lieu au même endroit. La durée
Mesure de la dépense énergétique
 Mesure de la dépense énergétique Bioénergétique L énergie existe sous différentes formes : calorifique, mécanique, électrique, chimique, rayonnante, nucléaire. La bioénergétique est la branche de la biologie
Mesure de la dépense énergétique Bioénergétique L énergie existe sous différentes formes : calorifique, mécanique, électrique, chimique, rayonnante, nucléaire. La bioénergétique est la branche de la biologie
Cours de. Point et système de points matériels
 Abdellah BENYOUSSEF Amal BERRADA Pofesseus à la Faculté des Scences Unvesté Mohammed V Rabat Cous de Pont et système de ponts matéels A L USAGE DES ETUDIANTS DU 1 ER CYCLE UNIVERSITAIRE FACULTES DES SCIENCES,
Abdellah BENYOUSSEF Amal BERRADA Pofesseus à la Faculté des Scences Unvesté Mohammed V Rabat Cous de Pont et système de ponts matéels A L USAGE DES ETUDIANTS DU 1 ER CYCLE UNIVERSITAIRE FACULTES DES SCIENCES,
Chapitre 6. Fonction réelle d une variable réelle
 Chapitre 6 Fonction réelle d une variable réelle 6. Généralités et plan d étude Une application de I dans R est une correspondance entre les éléments de I et ceu de R telle que tout élément de I admette
Chapitre 6 Fonction réelle d une variable réelle 6. Généralités et plan d étude Une application de I dans R est une correspondance entre les éléments de I et ceu de R telle que tout élément de I admette
Le théorème de Thalès et sa réciproque
 Le théorème de Thalès et sa réciproque I) Agrandissement et Réduction d une figure 1) Définition : Lorsque toutes les longueurs d une figure F sont multipliées par un même nombre k on obtient une autre
Le théorème de Thalès et sa réciproque I) Agrandissement et Réduction d une figure 1) Définition : Lorsque toutes les longueurs d une figure F sont multipliées par un même nombre k on obtient une autre
Oscillations libres des systèmes à deux degrés de liberté
 Chapitre 4 Oscillations libres des systèmes à deux degrés de liberté 4.1 Introduction Les systèmes qui nécessitent deux coordonnées indépendantes pour spécifier leurs positions sont appelés systèmes à
Chapitre 4 Oscillations libres des systèmes à deux degrés de liberté 4.1 Introduction Les systèmes qui nécessitent deux coordonnées indépendantes pour spécifier leurs positions sont appelés systèmes à
Cours C6 : Vibrations non linéaires
 Vibrations non linéaires Bruno COCHELIN Laboratoire de Mécanique et d Acoustique, CNRS UPR 751 Ecole Centrale Marseille Acoustique non linéaire et milieux complexes -6 Juin 14 - Oléron Acoustique non linéaire
Vibrations non linéaires Bruno COCHELIN Laboratoire de Mécanique et d Acoustique, CNRS UPR 751 Ecole Centrale Marseille Acoustique non linéaire et milieux complexes -6 Juin 14 - Oléron Acoustique non linéaire
LES ESCALIERS. Du niveau du rez-de-chaussée à celui de l'étage ou à celui du sous-sol.
 LES ESCALIERS I. DÉF I NIT I O N Un escalier est un ouvrage constitué d'une suite de marches et de paliers permettant de passer à pied d'un niveau à un autre. Ses caractéristiques dimensionnelles sont
LES ESCALIERS I. DÉF I NIT I O N Un escalier est un ouvrage constitué d'une suite de marches et de paliers permettant de passer à pied d'un niveau à un autre. Ses caractéristiques dimensionnelles sont
Chapitre 4: Dérivée d'une fonction et règles de calcul
 DERIVEES ET REGLES DE CALCULS 69 Chapitre 4: Dérivée d'une fonction et règles de calcul Prérequis: Généralités sur les fonctions, Introduction dérivée Requis pour: Croissance, Optimisation, Études de fct.
DERIVEES ET REGLES DE CALCULS 69 Chapitre 4: Dérivée d'une fonction et règles de calcul Prérequis: Généralités sur les fonctions, Introduction dérivée Requis pour: Croissance, Optimisation, Études de fct.
Polynômes à plusieurs variables. Résultant
 Polynômes à plusieurs variables. Résultant Christophe Ritzenthaler 1 Relations coefficients-racines. Polynômes symétriques Issu de [MS] et de [Goz]. Soit A un anneau intègre. Définition 1.1. Soit a A \
Polynômes à plusieurs variables. Résultant Christophe Ritzenthaler 1 Relations coefficients-racines. Polynômes symétriques Issu de [MS] et de [Goz]. Soit A un anneau intègre. Définition 1.1. Soit a A \
Dérivation : cours. Dérivation dans R
 TS Dérivation dans R Dans tout le capitre, f désigne une fonction définie sur un intervalle I de R (non vide et non réduit à un élément) et à valeurs dans R. Petits rappels de première Téorème-définition
TS Dérivation dans R Dans tout le capitre, f désigne une fonction définie sur un intervalle I de R (non vide et non réduit à un élément) et à valeurs dans R. Petits rappels de première Téorème-définition
Concours EPITA 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette BMW K1200S
 Concours EPIT 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette MW K1200S Durée : 2h. Calculatrices autorisées. Présentation du problème Le problème
Concours EPIT 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette MW K1200S Durée : 2h. Calculatrices autorisées. Présentation du problème Le problème
Chapitre 1 Cinématique du point matériel
 Chapitre 1 Cinématique du point matériel 7 1.1. Introduction 1.1.1. Domaine d étude Le programme de mécanique de math sup se limite à l étude de la mécanique classique. Sont exclus : la relativité et la
Chapitre 1 Cinématique du point matériel 7 1.1. Introduction 1.1.1. Domaine d étude Le programme de mécanique de math sup se limite à l étude de la mécanique classique. Sont exclus : la relativité et la
Problème 1 : applications du plan affine
 Problème 1 : applications du plan affine Notations On désigne par GL 2 (R) l ensemble des matrices 2 2 inversibles à coefficients réels. Soit un plan affine P muni d un repère (O, I, J). Les coordonnées
Problème 1 : applications du plan affine Notations On désigne par GL 2 (R) l ensemble des matrices 2 2 inversibles à coefficients réels. Soit un plan affine P muni d un repère (O, I, J). Les coordonnées